透镜保持机构、光学装置、控制系统和移动装置
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及透镜保持机构、光学装置、控制系统和移动装置。
背景技术
安装在诸如汽车的车辆中的光学装置包括例如用于执行驾驶辅助和自动驾驶功能的感测装置以及拍摄汽车周围的图像的照相机。具有感测功能的光学装置包括光检测和测距(LIDAR)装置,LIDAR装置是使用激光测量车辆间距离的激光雷达装置。近年来,在汽车上安装了越来越多的光学装置作为用于自动驾驶等的车载传感器,例如LIDAR装置。
通常,用作车载传感器的光学装置暴露于恶劣的环境变化。另一方面,作为用于减小响应于光学装置的环境变化(特别是响应于环境温度的变化)的每个透镜的位置变化的装置,例如,已知日本专利特开No.S61-149911中描述的弹性构件设置于透镜与压环之间的结构。
在日本专利特开No.S61-149911的结构中,如上所述,弹性构件设置于透镜与压环之间。在日本专利特开No.S61-149911的结构中,弹性构件可能会由于压环和弹性构件之间的接触阻力而扭曲。如果弹性构件扭曲,则会出现其对透镜施加的偏压力可能会变得不均匀的问题以及弹性构件可能会突出到有效光束区域中的问题。
此外,如日本专利特开No.S61-149911中所描述的,即使在弹性构件的前面和后面插入摩擦阻尼片,弹性构件也会由于压环的紧固力而扭曲,因此难以控制弹性构件的扭曲量。
诸如上述光学装置的设备具有保持光学元件的镜筒。当光学元件被保持在镜筒中时,如果环境温度发生变化,则由于光学元件与镜筒之间的线膨胀系数的差异而导致的光学元件与镜筒之间的膨胀和收缩量的差异,可能会在光轴方向上出现间隙(松动)。出现的松动可能会改变保持位置,这可能会导致光学性能降低并且部件随着时间的推移劣化。在温度在较大范围内变化的温度环境下,要求车载照相机、LID AR装置等在整个温度范围内都确保优异的性能和功能。
此外,由于成本原因,车载照相机通常不包含自动对焦机构。另一方面,存在这样的构造,其中,在压环与光学元件之间夹持并保持圆环形弹性构件,并且在室温下进行组装期间将该圆环形弹性构件预先挤压至所需量,以提供弹性力并在高温时消除松动。人们认为,将要求汽车的驾驶辅助和自动驾驶功能具有比目前更高的性能和更高的功能性,并且将要求作为汽车眼睛的车载照相机的光学系统变得更加复杂和高度功能化。
还认为,随着车载照相机的光学系统如上所述变得更加复杂和高度功能化,光学元件的数量将增加,由温度变化引起的压环、镜筒、光学元件等的松动可能会变得更大。此外,例如,当光学装置从外部附接至汽车时,弹性构件可以用于在雨天防滴和防水的目的。日本专利No.6192560公开了这样一种构造,其中压环和弹性构件以可与光学元件接触的状态一起保持光学元件。日本专利特开No.H05-127058公开了这样一种结构,其中光学元件经由弹性构件由压环保持。
在日本专利No.6192560和日本专利特开No.H05-127058中,在组装期间使压环旋转而拧入。在这种构造的情况下,由于弹性构件与压环和光学元件两者之间的摩擦,存在弹性构件可能经受变形(例如扭转或扭曲)的风险。如果在弹性构件变形的状态下保持光学元件,压环将不能施加均匀的力将光学元件保持在镜筒内,因此,存在引起光学元件倾斜等而导致组装精度降低、即光学性能降低的风险。
另外,如果在弹性构件变形的情况下,环境温度发生变化并且诸如镜筒和光学元件的部件根据其材料的线膨胀系数而膨胀和收缩,考虑到已经发生的松动,弹性构件的变形以及从挤压状态释放的量将部分地不同。因此,在环境温度发生变化时,光学性能有可能进一步降低。
发明内容
本发明的目的是提供一种能够沿光轴方向按压透镜的周边部分同时防止弹性构件扭曲的透镜保持机构。
根据本发明的一个方面的透镜保持机构是一种保持透镜的透镜保持机构,所述透镜保持机构包括构造成容纳透镜的镜筒、构造成能够相对于所述镜筒在沿着光轴的方向上移动的压环、构造成围绕所述光轴旋转以使所述压环在沿着所述光轴的方向上移动的旋转环、以及设置在所述透镜和所述压环之间的弹性构件,其中,所述镜筒设置有旋转限制部和移动限制部,所述旋转限制部构造成限制所述压环围绕所述光轴的旋转,所述移动限制部构造成限制所述压环在沿着所述光轴的方向上的移动,并且其中,通过使所述压环在沿着所述光轴的方向上移动,所述弹性构件在沿着所述光轴的方向上被偏压到所述透镜的周边部分。
通过下文参考附图对示例性实施例的描述,本发明的其他特征将变得明显。
附图说明
图1是示出了根据第一实施例的光学装置的结构的示例的视图。
图2是示出了根据第一实施例的望远镜的结构的剖视图。
图3是根据第二实施例的透镜单元中的光学装置及其周围的剖视图。
图4是根据第三实施例的光学装置的示意性剖视图。
图5是示出了图4中的光学元件、弹性构件和保持构件的分解透视图的示例。
图6是示出改变了图4所示的光学元件和保持构件的形状的示例的剖视图。
图7是示出了根据第四实施例的透镜模块的示例的剖视图。
图8是示出了根据第四实施例的光学元件、弹性构件和保持构件的示例的分解透视图。
图9是根据第五实施例的车载系统的构造图。
图10是作为包括根据第五实施例的车载系统的移动装置的车辆的示意图。
图11是示出了根据第五实施例的车载系统的示例性操作的流程图。
具体实施方式
以下,将使用实施例并参考附图来描述用于实施本发明的优选模式。将省略或简化参考各个附图时的重复描述。
第一实施例
图1是示出了根据第一实施例的光学装置(光学仪器)100的结构的视图。如图1所示,第一实施例的光学装置100是所谓的同轴LIDAR装置,其中,照射对象物的照明系统的光轴与接收来自对象物的反射光和散射光的接收系统的光轴在穿孔镜4处对准。
根据第一实施例的光学装置100包括穿孔镜4、固定镜5、可动镜6、聚光透镜7、光接收元件8、基座镜筒9、光源形成部(光投射部)10、控制单元14和望远镜20。
穿孔镜(导光部)4是由基座镜筒9固定地保持并且具有孔4a(开口)的反射镜。穿孔镜4能够使激光12透射通过孔4a并通过反射表面4b将其反射。穿孔镜4将来自光源形成部10的激光12引导至固定镜5,并将来自固定镜5的反射光引导至聚光透镜7。固定镜5是由基座镜筒9固定地保持的反射镜。固定镜5将来自穿孔镜4的激光12引导至可动镜6,并将来自可动镜6的反射光引导至穿孔镜4。
0001可动镜(偏转部或扫描部)6是由基座镜筒9固定地保持并利用来自光源形成部10的照明光扫描对象物的反射镜。可动镜6被构造为围绕图1中的Y轴以及与Y轴垂直的X轴旋转的双轴驱动镜。可动镜6的示例包括微机电系统(MEMS)反射镜。可动镜6利用来自固定镜5的激光12经由望远镜20的透镜(光学元件)照射目标区域,并且将来自目标区域中的障碍物11的反射光13经由望远镜20的透镜引导至固定镜5。
聚光透镜7是由基座镜筒9固定地保持、使来自穿孔镜4的激光12会聚并将会聚的激光12引导至光接收元件8的光学元件(聚光光学元件)。光接收元件8是用于对来自光源形成部10的照明光进行光电转换并输出信号的元件。使用光电二极管(PD)、雪崩光电二极管(APD)、单光子雪崩二极管(SPAD)等作为光接收元件8。穿孔镜4、固定镜5、可动镜6、聚光透镜7、光接收元件8等被包含和容纳在基座镜筒9中。
光源形成部(光投射部)10包括光源(半导体激光器)1、会聚透镜2和固定光圈3。光源1是发射激光(照射光)12的光源。会聚透镜2是调整来自光源1的激光12在目标照射区域中的光束形状的光学元件。固定光圈3构造成阻挡从光源1发出经由会聚透镜2的激光12中所包括的不必要的光,并通过其开口3a投射光。
控制单元14由包括CPU、存储器(存储单元)等的至少一个计算机构成。控制单元14通过线路连接至光学装置100的每个部件。控制单元14根据存储在存储器中的计算机程序控制光学装置100的所有部件的整体操作调整等。这样控制稍后将描述的图11中所示的流程图的操作。例如,控制单元14优选地与光学装置100的其它部分一体地配置,但是也可以与光学装置100的其它部分分开配置。
在第一实施例中,控制单元14控制光源1、可动镜6、光接收元件8等。具体地,控制单元14以预定的驱动电压和驱动频率驱动光源1和可动镜6,并且以特定的频率测量光接收元件8所接收的光的波形。然后,控制单元14测量光接收元件8接收光的时间与从光源1发出光的时间之间的差,或者测量光接收元件8所获取的光接收信号的相位与来自光源1的输出信号的相位之间的差,并将该差乘以光速以确定与对象物的距离。
望远镜(透镜保持机构)20是扩大来自可动镜6的激光12的光束直径并缩小来自障碍物11(对象物)的反射光13的光束直径的光学系统。具体地,望远镜20是包括多个光学元件(透镜)的光学系统(无焦系统),每个光学元件具有折射能力,作为整个系统不具有折射能力。望远镜20的构造将在后面描述。
这里,从根据第一实施例的光学装置100的光源形成部10发出的激光12通过固定光圈3的开口3a投射到基座镜筒9中。通过固定光圈3的开口3a投射的激光12穿过穿孔镜4的孔4a,被固定镜5反射,并通过可动镜6照射到目标区域上。
从望远镜20发射至目标区域的激光12被目标区域中的障碍物11反射,作为反射光13穿过望远镜20,并返回到可动镜6。被可动镜6反射的反射光13被固定镜5反射。之后,反射光13被穿孔镜4的反射面4b反射并被引导至聚光透镜7。从聚光透镜7发出的反射光13被引导至光接收元件8。光接收元件8对反射光13进行光电转换并输出信号。
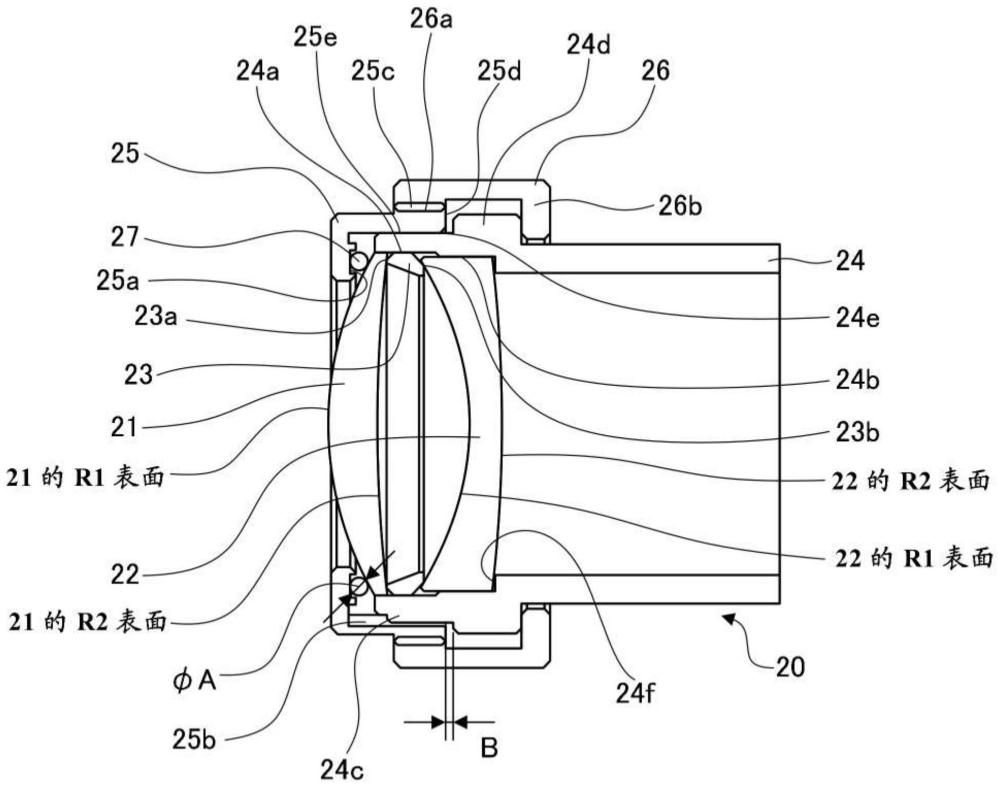
图2是示出了根据第一实施例的望远镜20的构造的剖视图的示例。下面将参考图2描述望远镜20的构造。第一实施例的望远镜20包括透镜21、透镜22、间隔件23、固定镜筒24、压环25、旋转环26和弹性构件27。
透镜21和间隔件23的外径被形成为比固定镜筒24的内径24a小。具体地,透镜21和间隔件23的外径被形成为比固定镜筒24的内径24a小大约10至20μm。透镜22的外径也被形成为比固定镜筒24的内径24b小。具体地,透镜22的外径被形成为比固定镜筒24的内径24b小大约10至20μm。因此,能够将透镜21、透镜22和间隔件23容纳在固定镜筒24中,使得它们沿光轴方向(沿着光轴的方向)布置。
间隔件23具有分别与透镜21的R2表面和透镜22的R1表面线接触的角部23a和角部23b,并管控透镜21和22在与光轴方向正交的方向(半径方向)上的偏心以及二者之间在光轴方向上的间隔。
通过使设置在压环25的内径上的环形端面25d与以环形形状设置在固定镜筒24上的突起(移动限制部)24d抵靠在一起来确定压环25相对于固定镜筒24在光轴方向上的位置。突起24d被形成为在与光轴正交的方向上径向向外突出预定量。通过将压环25的内径装配部25e和固定镜筒24的外径装配部24e装配在一起来确定压环25在与光轴正交的方向上的位置。
弹性构件27由橡胶等制成的构件构成,并且一体形成为圆环形形状(环形形状)。当与透镜21的周边部分接触时,由于弹性构件27一体形成为圆环形形状,所以弹性构件27接触透镜21的整个圆周。弹性构件27优选地具有如上所述的一体形成的圆环形形状,但是也可以具有例如与透镜21的一部分接触的环形形状。弹性构件27也可以由例如以预定间隔(例如,120度间隔)接触透镜21的三个分离的弹性构件构成。
弹性构件27设置在透镜21和压环25之间。具体地,通过将弹性构件27布置成使其装配在以环形形状形成于压环25上的凹槽25a中而使弹性构件27由压环25保持。凹槽25a夹住并引导弹性构件27,例如,使得在组装光学装置100或望远镜20时,弹性构件27的安装位置不偏移(不移动)或弹性构件27不脱离。凹槽25a可以是例如凹部(包括凹状以及与凹状等同的形状)或半圆形,并且可以是任何形状,只要在将弹性构件27设置在凹槽25a中时弹性构件27的位置不偏移即可。凹槽25a可以在透镜21的R1表面侧设置在透镜21上,在这种情况下,可以不在压环25上设置凹槽。
接下来,设置在压环25的内径上的键槽25b与固定镜筒24的键部(旋转限制部)24c装配。这样限制压环25围绕光轴(沿圆周方向)的旋转。进一步地,此时,设置在压环25的外径上(在与光轴正交的方向上的外周侧)的外螺纹部分25c被拧到设置在旋转环26的内径上(在与光轴正交的方向上的内周侧)的内螺纹部分26a中。因此,压环25和旋转环26被装配在一起并固定。使旋转环26在这种状态下围绕光轴旋转可以使压环25仅在光轴方向上移动。
在制造第一实施例的构造时,当压环25和固定镜筒24装配在一起,然后压环25和旋转环26装配在一起时,在固定镜筒24的突起24d与压环25的端面25d之间形成有预定间隙。该预定间隙被形成为在光轴方向上具有预定的宽度尺寸(间隔B)。间隔B的宽度尺寸是使得弹性构件27与透镜21的R1表面接触且弹性构件27未被偏压在透镜21上的尺寸。光轴方向上的宽度尺寸为间隔B的间隙被形成为相对于弹性构件27的横截面尺寸ΦA满足以下公式(1)的关系。
ΦA > B ... (1)
如以上公式(1)所示,间隔B的宽度尺寸比上述弹性构件27的横截面尺寸ΦA小。因此,通过作为光轴方向上的宽度尺寸的间隔B来确定弹性构件27在光轴方向上的变形量。
当旋转环26围绕光轴旋转时,压环25沿光轴方向移动,并且利用介于压环25和透镜21之间的弹性构件27沿光轴方向偏压透镜21的R1表面。由于弹性构件27的偏压力,设置在旋转环26的内径上的环形止挡件26b在光轴方向上与固定镜筒24的突起24d接触。当压环25的端面25d进一步移动直到其抵靠固定镜筒24的突起24d时,弹性构件27以间隔B变形,因此可以将透镜21、透镜22和间隔件23偏压在固定镜筒24的接收表面24f上。
0002由于间隔B比弹性构件27的横截面尺寸ΦA小,所以即使旋转环26围绕光轴旋转并且压环25的端面25d抵靠突起24d,也能够使弹性构件27在光轴方向上的变形大致均匀。压环25仅在光轴方向上可移动。因此,当压环25沿光轴方向移动并且弹性构件27被偏压在透镜21上时,弹性构件27不会由于扭矩而发生扭曲,并且在整个圆周上与透镜21的周边部分接触,使得其能够均匀地按压透镜21。
在第一实施例中,例如,线膨胀系数为26×10
这里,作为示例,假设铝合金的间隔件23的厚度为5mm,并且玻璃材料的透镜21的R1表面上的接收部分与透镜22的R2表面上的接收部分之间的间隔为15mm。透镜21的R1表面上的接收部分是透镜21的与弹性构件27接触的部分,透镜22的R2表面上的接收部分是透镜22的与固定镜筒24的接收表面24f接触的部分。
此时,当温度变化1℃时,在透镜21的R1表面上的接收部分与透镜22的R2表面上的接收部分之间出现大约0.19μm的热膨胀差。也就是说,当温度变化1℃时,在固定镜筒24与透镜之间出现大约0.19μm的间隙差。例如,在将光学装置100放置在外部环境中(例如,户外)的情况下,例如在那时的环境温度、光学装置100内部的温度等比组装光学装置100等时的温度上升60℃的环境中会在光轴方向上出现大约11.4μm的松动(松动量)。另一方面,在环境温度比如上所述的组装时的温度下降60℃的环境中,会在光轴方向上出现大约11.4μm的透镜变形。
假设根据第一实施例的光学装置100用于自动驾驶等,并且应用于LIDAR装置,该LIDAR装置是使用激光测量车辆间距离的激光照射装置。因此,光学装置100经常暴露于恶劣的环境变化。因此,如果如上所述由于较大的温度变化而在光轴方向上出现松动,则例如存在透镜21和22在与光轴正交的方向上发生偏移(即,变得偏心)的可能性。或者,存在透镜21和22变形并且像差变得更严重的可能性。可以想象,这些会导致投影位置和成像位置偏移,降低障碍物11的测量精度。也可以想象,例如,在测量障碍物11表面上的微小特征点时,测量变得困难。
在第一实施例中,设置在压环25的凹槽25a中、与透镜21接触并沿光轴方向偏压透镜的弹性构件27弹性变形以吸收如上所述的光轴方向上的松动。也就是说,在如上所述的环境温度比组装光学装置100等时的温度上升或下降60℃的环境中,透镜的长度在光轴方向上变化大约11.4μm,但是此时透镜的变形量可以由弹性构件27吸收。对于在与透镜21和22的光轴正交的方向上(在径向方向上)出现的松动,当装置暴露于上述环境时,固定镜筒24的突起24d抵靠压环25的端面25d。因此,透镜21和22被间隔件23和弹性构件27按压,从而可以减小相对偏心。
在根据第一实施例的光学装置100中,如上所述,弹性构件27可以吸收望远镜20中包含的透镜21和22等在光轴方向上的松动。也就是说,当形成为环形形状的单个弹性构件27按压多个透镜(透镜21和22)和间隔件23时,弹性构件27能够吸收由于温度变化引起的线膨胀差而造成的多个透镜和间隔件的松动量。此外,因为压环25仅在光轴方向上可移动,所以压环25可以均匀地按压透镜的周边部分,而不会导致弹性构件27由于扭矩而扭曲。另外,由于使间隔B的尺寸比弹性构件27的横截面尺寸ΦA小,所以弹性构件27最多仅变形预定间隙的间隔B的尺寸。因此,能够使弹性构件27在光轴方向上的变形大致均匀,并且能够均匀地按压透镜21的周边部分。
已经针对望远镜20由两个透镜构成的结构描述了第一实施例,但是透镜的数量不限于两个,也可以是一个以上。在第一实施例中,还假设本发明应用于作为激光照射装置(激光雷达装置)的LIDAR装置的望远镜,但是本发明不限于此,也可以应用于除激光照射装置以外的其它装置。
第二实施例
已经针对采用弹性构件27作为用于固定LIDAR装置的望远镜的前透镜(透镜21)的部分的示例对第一实施例进行了描述。将针对通过保持成像透镜单元中的图像拾取元件30的传感器保持器35来保持透镜的模式对第二实施例进行描述。在第二实施例中未提及的事项与第一实施例一致。
图3是示出了根据第二实施例的光学装置100的结构的视图。具体地,图3是光学装置100中的成像透镜单元(透镜保持机构)中的图像拾取元件30及其周围的剖视图。
在图3中,透镜31、透镜32和间隔件33被包含在固定镜筒34中,并且构成成像透镜单元的一部分。透镜31的外径被形成为比固定镜筒34的内径34a小。具体地,透镜31的外径被形成为比固定镜筒34的内径34a小大约10至20μm。透镜32和间隔件33的外径也被形成为比固定镜筒34的内径34b小。具体地,透镜32和间隔件33的外径被形成为比固定镜筒34的内径34b小大约10至20μm。因此,能够将透镜31、透镜32和间隔件33容纳在固定镜筒34中,使得它们沿光轴方向布置。
间隔件33具有分别与透镜31的R2表面和透镜32的R1表面线接触的角部33a和角部33b,并管控透镜31和32在与光轴方向正交的方向上的偏心以及二者之间在光轴方向上的间隔。
图像拾取元件30由传感器保持器35固定地保持,并且通过使以环形形状设置在传感器保持器35上的端面35d与设置在固定镜筒34的内径上的环形突起(移动限制部)34d抵靠在一起来确定传感器保持器35相对于固定镜筒34在光轴方向上的位置。突起34d被形成为在与光轴正交的方向上径向向外突出预定量。通过将传感器保持器35的内径装配部35e和固定镜筒34的外径装配部34e装配在一起来确定传感器保持器35在与光轴正交的方向上的位置。
弹性构件37设置在透镜32和传感器保持器35之间。具体地,通过将弹性构件37布置成使其装配在以环形形状形成在传感器保持器35上的凹槽35a中而使弹性构件37由传感器保持器35保持。凹槽35a夹住并引导弹性构件37,例如,使得在组装光学装置100或成像透镜单元时弹性构件27的安装位置不偏移(不移动)或弹性构件27不脱离。
此外,设置在传感器保持器35的内径上的键槽35b与固定镜筒34的键部(旋转限制部)34c装配。这样限制了传感器保持器35围绕光轴的旋转。进一步地,此时,设置在传感器保持器35的外径上的外螺纹部分35c被拧到设置在旋转环36的内径上的内螺纹部分36a中。因此,传感器保持器35和旋转环36被装配在一起并固定。使旋转环36在这种状态下围绕光轴旋转可以使传感器保持器35仅在光轴方向上移动。
在制造第二实施例的光学装置100时,当传感器保持器35和固定镜筒34装配在一起,然后传感器保持器35和旋转环36装配在一起时,在固定镜筒34的突起34d与传感器保持器35的端面35d之间形成有预定间隙。该预定间隙被形成为在光轴方向上具有预定的宽度尺寸(间隔D)。间隔D的宽度尺寸是使得弹性构件37与透镜32的R2表面接触并且弹性构件37未被偏压在透镜32上的尺寸。光轴方向上的宽度尺寸为间隔D的间隙被形成为相对于弹性构件37的横截面尺寸ΦC满足以下公式(2)的关系。
ΦC>D...(2)
如以上公式(2)所示,间隔D的宽度尺寸比上述弹性构件37的横截面尺寸ΦC小。因此,通过作为光轴方向上的宽度尺寸的间隔D来确定弹性构件37在光轴方向上的变形量。
当旋转环36围绕光轴旋转时,传感器保持器35沿光轴方向移动,并且利用介于传感器保持器35和透镜32之间的弹性构件37沿光轴方向偏压透镜32的R2表面。由于弹性构件37的偏压力,设置在旋转环36的内径上的环形止挡件36b在光轴方向上与设置在固定镜筒34上的突起34d接触。当传感器保持器35的端面35d进一步移动直到其抵靠固定镜筒34的突起34d时,弹性构件37以间隔D变形,因此可以将透镜32、透镜31和间隔件33偏压在传感器保持器35的接收表面35f上。
由于间隔D小于弹性构件37的横截面尺寸ΦC,所以即使旋转环36围绕光轴旋转并且传感器保持器35的端面35d抵靠突起34d,也能够使弹性构件37在光轴方向上的变形大致均匀。传感器保持器35仅在光轴方向上可移动。因此,当传感器保持器35沿光轴方向移动并且弹性构件37被偏压在透镜32上时,弹性构件37不会由于扭矩而发生扭曲,并且在整个圆周上与透镜32的周边部分接触,使得其能够均匀地按压透镜32。
在第二实施例中,例如,线膨胀系数为26×10
这里,作为示例,假设铝合金的间隔件33的厚度为5mm,并且玻璃材料的透镜31的R1表面上的接收部分与透镜32的R2表面上的接收部分之间的间隔为15mm。透镜31的R1表面上的接收部分是透镜31的与传感器保持器35的接收表面35f接触的部分,透镜32的R2表面上的接收部分是透镜32的与弹性构件37接触的部分。
此时,当温度变化1℃时,在透镜31的R1表面上的接收部分与透镜32的R2表面上的接收部分之间出现大约0.19μm的热膨胀差。也就是说,在固定镜筒34与透镜之间出现大约0.19μm的间隙差。例如,在将光学装置100放置在外部环境中(例如,户外)的情况下,例如在那时的环境温度、光学装置100内部的温度等比组装光学装置100等时的温度上升60℃的环境中在光轴方向上出现大约11.4μm的松动(松动量)。另一方面,在环境温度比如上所述的组装时的温度下降60℃的环境中,会在光轴方向上出现大约11.4μm的透镜变形。与第一实施例类似,假设根据第二实施例的光学装置100用于自动驾驶等,并且应用于LIDAR装置,该LIDAR装置是使用激光测量车辆间距离的激光照射装置。
在第二实施例中,设置在传感器保持器35的凹槽35a中、与透镜32接触并且沿光轴方向偏压透镜的弹性构件37弹性变形以吸收如上所述的光轴方向上的松动。也就是说,在如上所述的环境温度比组装光学装置100等时的温度上升或下降60℃的环境中,透镜的长度在光轴方向上变化大约11.4μm,但是此时透镜的变形量可以由弹性构件27吸收。对于在与透镜31和32的光轴正交的方向上(在径向方向上)出现的松动,当装置暴露于上述环境时,固定镜筒34的突起34d抵靠传感器保持器的端面35d。因此,透镜31和32被间隔件33和弹性构件37按压,从而可以减小相对偏心。
在根据第二实施例的光学装置100中,如上所述,弹性构件37可以吸收成像透镜单元中包含的透镜31和32等在光轴方向上的松动。也就是说,当形成为环形形状的单个弹性构件37按压多个透镜(透镜31和32)和间隔件33时,弹性构件37能够吸收由于温度变化引起的线膨胀差而造成的多个透镜和间隔件的松动量。此外,类似于第一实施例,因为传感器保持器35仅在光轴方向上可移动,所以传感器保持器35可以均匀地按压透镜的周边部分,而不会导致弹性构件37由于扭矩而扭曲。另外,由于使间隔D的尺寸比弹性构件37的横截面尺寸ΦC小,所以弹性构件37最多仅变形预定间隙的间隔D的尺寸。因此,能够使弹性构件37在光轴方向上的变形大致均匀,并且能够均匀地按压透镜的周边部分。
已经针对成像透镜单元由两个透镜构成的结构对第二实施例进行了描述,但是透镜的数量不限于两个,也可以是一个以上的任意数量。
第三实施例
图4是根据第三实施例的光学装置100的示意性剖视图。图5是根据第三实施例的第一光学元件5、保持构件7和弹性构件8的分解透视图的示例。下面将参考图4和图5描述第三实施例的光学装置100。
第三实施例的光学装置100包括镜头模块2、壳体3、电气装置(未示出)以及控制单元(未示出)。尽管未示出,但是光学装置100还包括穿孔镜、固定镜、可动镜、聚光透镜、光接收元件、光源形成部(光投射部)等。这里,例如,在光学装置100是车载照相机时,透镜模块2用作成像光学系统,并且在信号被输入到包括图像传感器的电气装置(未示出)时,获取汽车周围的环境信息。所获取的信息用于例如驾驶辅助或自动驾驶系统中。
透镜模块2包括镜筒4、第一光学元件5、另一光学元件6、保持构件7和弹性构件8。保持构件7将布置有间隔件(未示出)的第一光学元件5和另一光学元件6保持在镜筒4中。透镜模块2由壳体3保持。
壳体3容纳穿孔镜、固定镜、可动镜、聚光透镜、光接收元件、光源形成部(光投射部)等(未示出)。穿孔镜(导光部)是由壳体3固定地保持并且具有孔(开口)的反射镜。穿孔镜可以使照明光(例如,激光)透射通过所述孔并通过反射表面将其反射。穿孔镜将来自光源形成部的激光引导至固定镜,并将来自固定镜的反射光引导至聚光透镜。固定镜是由壳体3固定地保持的反射镜。固定镜将来自穿孔镜的照明光引导至可动镜,并将来自可动镜的反射光引导至穿孔镜。
可动镜(偏转部或扫描部)是由壳体3固定地保持并利用来自光源形成部的照明光扫描对象物的反射镜。可动镜可以被构造成双轴驱动镜,并且,例如MEMS镜可以用作可动镜。可动镜利用来自固定镜的照明光经由光学元件(第一光学元件5和另一光学元件6)照射目标区域,并且将来自目标区域中的对象物的反射光经由光学元件引导至固定镜。
聚光透镜是由壳体3固定地保持、会聚来自穿孔镜的照明光并将会聚的照明光引导至光接收元件的光学元件(聚光光学元件)。光接收元件是用于对来自光源形成部的照明光进行光电转换并输出信号的元件。使用PD、APD、SPAD等作为光接收元件。穿孔镜、固定镜、可动镜、聚光透镜、光接收元件等被包含和容纳在壳体3中。
光源形成部(光投射部)包括光源单元(半导体激光器)、会聚透镜和固定光圈。光源单元是发射照明光的光源。会聚透镜是调整来自光源单元的照明光在目标照射区域中的形状(光束形状)的光学元件。固定光圈构造成阻挡从光源单元发出的经由会聚透镜的照明光中所包括的不必要的光,并且通过其开口投射光。
镜筒4具有外螺纹部分4a和支撑部分4b,并且容纳第一光学元件5和另一光学元件6。第三实施例的镜筒4由金属或树脂材料制成。外螺纹部分4a是沿着镜筒4的外周形成在镜筒4的圆柱形或圆锥形外表面的一部分上的螺纹部分。支撑部分4b是与光轴垂直的表面(与光轴正交的表面),其面向另一光学元件6的光轴方向上的一个侧表面,并且该支撑部分支撑第一光学元件5和另一光学元件6。这里,支撑部分4b不限于与光轴垂直的表面,也可以是相对于光轴倾斜的表面。
第一光学元件(透镜)5具有突起接收部分(被接合部分)5a。在第三实施例中,突起接收部分5a构造成在第一光学元件5的外径部分上(在与光轴正交的方向上的外周侧)具有平面表面(平面部分)。这里,在第三实施例中,在第一光学元件5上设置有一个突起接收部分5a。然而,如果形成有多个将在后面描述的突起7a,则可以根据形成的突起7a的数量形成多个突起接收部分5a。第一光学元件5被构造为凸透镜。然而,第一光学元件5不限于此,也可以构造成诸如凹透镜或非球面透镜的形状。第一光学元件5由诸如玻璃或树脂材料的透明构件制成。
保持构件7具有突起(接合部分)7a和内螺纹部分7b。突起7a被形成为在光轴方向上突出预定长度,并且构造成在当组装镜头模块2时其要抵接(接合)突起接收部分5a的平面部分的位置处具有平面表面(平面部分)。突起7a在光轴方向上的长度被设置为使得在组装镜头模块2时,它不会突出超过第一光学元件5在另一光学元件6侧的端部。因此,可以任意地设置突起7a在光轴方向上的突出长度,只要它不突出超过第一光学元件5在另一光学元件6侧的端部并且可以在适当的长度上抵接突起接收部分5a即可。
尽管在第三实施例中保持构件7上设置有一个突起7a,但是本发明不限于此,也可以形成多个突起7a。在这种情况下,根据突起7a的数量和位置在第一光学元件5上形成突起接收部分5a。尽管在图4和图5中突起接收部分5a沿径向方向抵接(接合)突起7a,但是在突起接收部分5a与突起7a之间可以存在微小的径向间隙。也就是说,突起7a和突起接收部分5a仅需要在径向方向或周向方向上彼此接合。
内螺纹部分7b是沿着保持构件7的内周形成在保持构件7的圆柱形或圆锥形内表面的一部分上的螺纹部分。通过将图4所示的外螺纹部分4a和内螺纹部分7b拧在一起,将保持构件7装配并固定至镜筒4。
保持构件7具有圆环形凹槽,弹性构件8将被设置在该圆环形凹槽中。保持构件7的凹槽形成在保持构件7上,使得它在与光轴正交的方向上位于突起7a的表面的径向内侧,如图5所示。保持构件7的凹槽还构造成使得其在径向方向上的尺寸与弹性构件8在与光轴正交的方向上(在径向方向上)的横截面直径基本相同。
保持构件7的凹槽夹住并保持弹性构件8,例如,使得当组装光学装置100或透镜模块2时,弹性构件8的安装位置不偏移(不移动)或者弹性构件8不脱离。凹槽可以是例如凹部(包括凹状以及与凹状等同的形状)或半圆形,并且可以是任何形状,只要在将弹性构件8设置在凹槽中时弹性构件8的位置不偏移即可。凹槽也可以设置在第一光学元件5上,在这种情况下,可以不在保持构件7上设置凹槽。第三实施例的保持构件7由金属或树脂材料制成。
弹性构件8由诸如硅橡胶的橡胶材料制成,并且一体地形成为圆环形形状(环形形状)。当与第一光学元件5的周边部分接触时,由于弹性构件8一体地形成为环形形状,所以弹性构件8接触第一光学元件5的整个圆周。弹性构件8优选地具有如上所述的一体形成的环形形状,但是也可以具有例如与第一光学元件5的一部分接触的环形形状。或者,弹性构件8可以由以预定间隔(例如,120度间隔)接触第一光学元件5的三个弹性构件等构成。在组装镜头模块2时,弹性构件8被夹在并保持在第一光学元件5和保持构件7之间。
尽管在图4和图5中未示出,但是根据第三实施例的光学装置100的控制单元由包括CPU、存储器(存储单元)等的至少一个计算机构成,并且通过线路连接至光学装置100的每个部件。控制单元根据存储在存储器中的计算机程序控制第三实施例的光学装置100的所有部件的整体操作调整等。类似于第一实施例,这样控制稍后将描述的图11中所示的流程图的操作。例如,控制单元优选地与光学装置100的其它部分(例如,壳体3)一体地配置,但是也可以与光学装置100的其它部分分开配置。
控制单元(未示出)控制光源单元、可动镜、光接收元件等。具体地,控制单元以预定的驱动电压和驱动频率驱动光源单元和可动镜,并以特定的频率测量光接收元件所接收的光的波形。然后,控制单元测量光接收元件接收光的时间与从光源单元发射光的时间之间的差,或者测量光接收元件所获取的光接收信号的相位与来自光源单元的输出信号的相位之间的差,并且将该差乘以光速以确定与对象物的距离。第三实施例的控制单元可以与第一或第二实施例的控制单元14相同。
接下来,将描述用于将第一光学元件5和另一光学元件6保持在镜筒4中的流程(过程)。首先,将弹性构件8插入并夹在保持构件7的凹槽中,使得弹性构件8由保持构件7保持。接下来,将另一个光学元件6插入到镜筒4中。接下来,插入第一光学元件5,并且使第一光学元件5的突起接收部分5a的平面部分抵靠保持构件7的突起7a的平面部分。
之后,将保持构件7的内螺纹部分7b与镜筒4的外螺纹部分4a拧在一起,使得当突起7a的平面部分与突起接收部分5a的平面部分在与光轴正交的方向上(在径向方向上)彼此抵接(接合)时,保持构件7和镜筒4被固定。因此,当第一光学元件5、保持构件7和弹性构件8围绕光轴沿旋转方向(圆周方向)旋转时,它们作为一体的单元进行旋转。
利用上述构造,可以保持弹性构件8同时防止可能由弹性构件8与接触弹性构件8的第一光学元件5和保持构件7两者之间的摩擦引起的弹性构件8的扭转或扭曲变形。由此,保持构件7能够经由弹性构件8以均匀的力保持(按压)第一光学元件5的周边部分。
在第三实施例中,例如,线膨胀系数为26×10
这里,作为示例,假设在另一个光学元件6中存在一个厚度为5mm的间隔件,并且第一光学元件5的R1表面上的接收部分与镜筒4的支撑部分4b之间在光轴方向上的间隔是25mm。第一光学元件5的R1表面上的接收部分是第一光学元件5的与弹性构件8接触的部分。
此时,当温度变化1℃时,在第一光学元件5的R1表面上的接收部分与镜筒4的支撑部分4b之间出现大约0.29μm的热膨胀差。也就是说,在镜筒4与第一光学元件5之间出现大约0.29μm的间隙差。因此,例如,在将光学装置100放置在外部环境中(例如,户外)的情况下,在那时的环境温度、光学装置100内部的温度等比组装光学装置100等时的温度上升60℃的环境中,在光轴方向上出现大约17.4μm的松动(松动量)。另一方面,在如上所述的环境温度比组装时的温度下降60℃的环境中,在光轴方向上出现大约17.4μm的透镜(光学元件)变形。
在第三实施例中,设置在保持构件7的凹槽中、与第一光学元件5接触并且沿光轴方向按压第一光学元件5的弹性构件8弹性变形以吸收如上所述的光轴方向上的松动。也就是说,在如上所述的环境温度比组装光学装置100等时的温度上升或下降60℃的环境中,光学元件的长度在光轴方向上变化大约11.4μm,但是此时光学元件的变形量可以由弹性构件8吸收。
此外,弹性构件8被保持为使得第一光学元件5、保持构件7和弹性构件8能够作为一体的单元围绕光轴旋转,从而可以防止可能由摩擦引起的弹性构件8的扭转或扭曲变形。在第三实施例中,突起接收部分5a的抵靠突起7a的平面表面的表面也被形成为如上所述的平面形状,使得形状易于加工。然而,突起接收部分5a和突起7a的形状不限于这些,也可以是例如图6中所示的形状。
图6是保持构件27、弹性构件28和第一光学元件25的分解透视图。图6所示的部件与图4和图5所示的部件的不同之处在于突起和突起接收部分的形状,因此将省略与上述部分相同的部分的描述。
如图6所示,保持构件27的突起(接合部分)27a被形成为在与光轴正交的方向上具有矩形横截面。此外,突起27a被形成为在光轴方向上突出预定长度。第一光学元件25的突起接收部分25a也以与突起27a相对应的形状形成在第一光学元件25上。例如,图6的示例中的突起接收部分25a被形成为在与光轴正交的方向上具有凹形横截面。
尽管在图6中突起27a在径向方向上的横截面形状是矩形,但是它也可以是除矩形之外的形状,例如三角形或梯形。在这种情况下,突起接收部分25a具有与突起27a的形状相对应的形状。尽管在图6中突起接收部分25a径向抵接(接合)突起27a,但是突起接收部分25a的凹槽的深度可以比突起27a的厚度深。也就是说,突起27a和突起接收部分25a仅需要在径向方向或周向方向上彼此接合。
在上述第三实施例的光学装置100中,第一光学元件5(25)、保持构件7(27)和弹性构件8(28)作为一体的单元进行旋转,从而可以保持弹性构件8,同时防止弹性构件8的扭转或扭曲变形。因此,可以提供这样的光学装置100,其可以通过保持构件7经由弹性构件8以均匀的力保持第一光学元件5。
尽管已经假设将根据第三实施例的光学装置100应用于用于驾驶辅助或自动驾驶的车载照相机,但是本发明不限于此,也可以将其应用于用于车载照相机的光学装置。
第四实施例
已经针对在光学元件(第一光学元件5)的外径部分上设置有形状与突起7a的形状相对应的突起接收部分5a的示例对第三实施例进行了描述。将针对在光学元件(第一光学元件5)的除了外径之外的部分上设置有突起接收部分的透镜模块(透镜保持机构)对第四实施例进行描述。在第四实施例中未提及的事项与第三实施例一致。
图7是示出了根据第四实施例的透镜模块22的剖视图。图8是根据第四实施例的第一光学元件35、保持构件37和弹性构件38的分解透视图的示例。
在第四实施例中,第一光学元件35被构造为树脂模制透镜。保持构件37也被构造为树脂模制部件。通过将第一光学元件35和保持构件37构造为树脂模制部件,可以降低第一光学元件35和保持构件37的制造成本或部件成本,并且在加工等时可以将它们加工成自由度高的形状。
镜筒34具有内螺纹部分34a和支撑部分34b。第四实施例的镜筒4由金属或树脂材料制成。内螺纹部分34a是沿着镜筒34的内周形成在镜筒34的圆柱形或圆锥形内表面的一部分上的螺纹部分。支撑部分34b是与光轴垂直的表面(与光轴正交的表面),其面向另一光学元件36的光轴方向上的一个侧表面,并且该支撑部分支撑第一光学元件35和另一光学元件36。这里,支撑部分34b不限于与光轴垂直的表面,也可以是相对于光轴倾斜的表面。
第一光学元件35具有突起接收部分(被接合部分)35a。突起接收部分35a设置在第一光学元件35的有效直径的外侧与其外径的内侧之间。每个突起接收部分35a构造成与每个突起37a相对应的形状,并且在第四实施例中,其在与光轴正交的方向上的横截面被形成为圆形。每个突起接收部分35a被构造为孔,该孔的尺寸使得在组装透镜模块22时能够将突起37a插入孔中。尽管在图8所示的示例中,在第一光学元件35上设置有三个突起37a,但是本发明不限于此,可以形成至少一个以上的突起37a。根据突起37a的数量和位置形成突起接收部分35a。突起接收部分35a的数量优选地与突起37a的数量相同,但是也可以大于突起37a的数量。
保持构件37具有突起(接合部分)37a和外螺纹部分37b。每个突起37a在与光轴正交的方向上具有圆形横截面,并且在光轴方向上突出预定长度。也就是说,第四实施例的每个突起37a被构造成如图8所示的圆柱形。
突起37a在光轴方向上的长度被设置为使得在组装镜头模块22时它不会突出超过第一光学元件35在另一光学元件36侧的端部。因此,可以任意地设置突起7a在光轴方向上的长度,只要它不从第一光学元件35在另一光学元件36侧的端部突出即可。突起接收部分35a可以不是通孔,而仅需要形成为比突起37a在光轴方向上的突出长度长。
外螺纹部分37b是沿着保持构件37的外周形成在保持构件37的圆柱形或圆锥形外表面的一部分上的螺纹部分。通过将图7所示的内螺纹部分34a和外螺纹部分37b拧在一起,将保持构件37装配并固定至镜筒34。
弹性构件38由诸如硅橡胶的橡胶材料制成,并且一体地形成为圆环形形状(环形形状)。第四实施例的弹性构件38在与光轴正交的方向上位于突起37a的外侧,并且由保持构件7保持,使得弹性构件38的内表面接触突起37a的外表面。
接下来,将描述用于将第一光学元件35和另一光学元件36保持在镜筒34中的流程(过程)。首先,插入弹性构件38,使得弹性构件38的内表面接触保持构件37的突起37a的外表面。接下来,将另一个光学元件36插入到镜筒34中。接下来,插入第一光学元件35。接下来,将保持弹性构件38的保持构件37的突起37a插入到第一光学元件35的突起接收部分35a中。接下来,将保持构件37的外螺纹部分37b拧入镜筒34的内螺纹部分34a中,使得在突起37a和突起接收部分35a彼此邻接(接合)时,保持构件37和镜筒34被固定。因此,当第一光学元件35、保持构件37和弹性构件38围绕光轴沿旋转方向(圆周方向)旋转时,它们作为一体的单元进行旋转。
利用上述构造,可以保持弹性构件38同时防止弹性构件38的扭转或扭曲变形。因此,可以提供这样的光学装置100,其中保持构件37可以经由弹性构件38以均匀的力保持(按压)第一光学元件35,类似于第三实施例。
尽管在图8中突起接收部分35a是圆形孔并且在径向方向上接合突起37a,但是突起接收部分35a也可以是沿径向方向延伸的细长孔。也就是说,突起37a和突起接收部分35a仅需要在径向方向或周向方向上彼此接合。此外,尽管已经假设将根据第三或第四实施例的光学装置100应用于用于驾驶辅助或自动驾驶的车载照相机,但是本发明不限于此,也可以将其应用于除车载照相机之外的装置。
第五实施例
图9是根据上述每个实施例的光学装置100以及包括光学装置100的车载系统(驾驶辅助装置)1000的构造图。车载系统1000由诸如汽车(车辆)的可移动的移动体(移动装置)保持,并且是用于基于由光学装置100获取的车辆周围的对象物(例如,障碍物和行人)的距离信息来辅助车辆500的驾驶(转向)的控制系统。图10是作为包括车载系统1000的移动装置的车辆500的示意图。尽管图10示出了光学装置100的距离测量范围(检测范围)50被设置在车辆500前方的情况,但是距离测量范围50也可以被设置在车辆500的后方或侧方。
如图9所示,车载系统1000包括光学装置100、车辆信息获取装置200、控制装置(控制单元或电子控制单元(ECU))300和警告装置(警告单元)400。车载系统1000中的光学装置100中包括的根据第一或第二实施例的控制单元14或根据第三或第四实施例的控制单元(未示出)具有与距离获取单元(获取单元)和碰撞判定单元(判定单元)相对应的功能。然而,如果需要,车载系统1000可以设置有与控制单元分开的距离获取单元和碰撞判定单元,并且距离获取单元和碰撞判定单元可以设置在光学装置100外部(例如,车辆500的内部)。或者,控制装置300可以用作根据第一或第二实施例的控制单元14或者用作根据第三或第四实施例的控制单元(未示出)。
图11是示出了根据第五实施例的车载系统1000的示例性操作的流程图。下面将参照该流程图描述车载系统1000的操作。
首先,在步骤S1中,利用由光学装置100的光源形成部发射的激光照射车辆500周围的对象物(障碍物),并接收来自该对象物的反射光。控制单元基于光接收元件(光接收单元)在接收到反射光时输出的信号来获取对象物的距离信息。此时,距离获取单元用作构造成基于来自光接收元件的信号获取对象物的距离信息的距离信息获取单元。这里,距离信息可以是与从移动装置(车辆500)到对象物的距离有关的信息,可以不是距离本身。在步骤S2中,车辆信息获取装置200获取包括车辆500的车速、横摆率、转向角等的车辆信息。然后,在步骤S3中,控制单元使用在步骤S1中获取的距离信息以及在步骤S2中获取的车辆信息来判定与对象物的距离是否在预先设置的设定距离范围内。
因此,可以判定在车辆500周围的设定距离范围内是否存在对象物,并且可以判定车辆500与对象物之间发生碰撞的可能性。步骤S1和S2可以以与上述顺序相反的顺序执行,或者可以彼此并行执行。如果在设定距离范围内存在对象物,则控制单元判定“有碰撞的可能性”(步骤S4),如果在设定距离范围内不存在对象物,则控制单元判定“没有碰撞的可能性”(步骤S5)。
接下来,在判定“有碰撞的可能性”时,控制单元将判定结果报告(发送)给控制装置300和警告装置400。此时,控制装置300基于控制单元的判定结果控制车辆500(步骤S6),警告装置400基于控制单元的判定结果警告车辆500的用户(驾驶员或乘客)(步骤S7)。此时,警告装置400用作构造成根据对象物的距离信息发出警告的警告单元。判定结果只需要报告给控制装置300和警告装置400中的至少一个。
控制装置300用作控制单元,该控制单元构造成能够通过向车辆500的驱动单元(例如发动机或马达)输出控制信号来控制车辆500的驱动和移动。控制装置300执行对车辆500的控制,例如制动、释放加速器、转动方向盘、以及产生用于向每个车轮施加制动力以限制发动机或马达的输出的控制信号。警告装置400例如通过向用户发出警告声音、在汽车导航系统的屏幕上显示警告信息或者振动安全带或方向盘来警告用户。
如上所述,根据第五实施例的车载系统1000可以通过上述处理来检测和测量对象物而避免车辆500和对象物之间的碰撞。特别是,通过将根据以上实施例中的每一个实施例的光学装置100应用于车载系统1000,可以实现高精度的距离测量,从而可以以高精度执行对象物检测和碰撞判定。
尽管在第五实施例中将车载系统1000应用于驾驶辅助(减轻碰撞损害),但是车载系统1000不限于此,也可以将其应用于巡航控制(包括全速范围自适应巡航控制)、自动驾驶等。车载系统1000不仅可以应用于诸如汽车的车辆,还可以应用于诸如船舶、飞机和工业机器人的移动体。车载系统1000不仅可以应用于移动体,还可以应用于使用物体识别的各种装置,例如智能交通系统(ITS)和监视系统。
车载系统1000或车辆500可以设置有报告装置(报告单元),如果车辆500与障碍物发生碰撞,报告装置向车载系统生产商(制造商)、移动装置分销商(经销商)等报告该事实。该报告装置例如可以是通过电子邮件等将关于车辆500与障碍物之间的碰撞的信息(碰撞信息)发送到预设的外部报告目的地的报告装置。
通过采用报告装置以这种方式自动报告碰撞信息的构造,能够在发生碰撞后迅速地采取诸如检查、修理的措施。碰撞信息的报告目的地可以是保险公司、医疗机构、警察等或由用户设定的任何其它方。另外,报告装置也可以构造成不仅将碰撞信息报告给报告目的地,还将各部件的故障信息或消耗品的消耗信息报告给报告目的地。可以使用基于来自根据上述第一或第二实施例的光接收元件8或来自根据第三或第四实施例的光接收元件(未示出)的输出而获取的距离信息来检测是否存在碰撞,或者可以通过其它检测单元(传感器)来检测是否存在碰撞。
可以经由网络或各种存储介质将实现上述各实施例的功能的计算机程序提供至光学装置100等,以执行上述各实施例中的一些控制或所有控制。然后,光学装置100等的计算机(或CPU、MPU等)可以读取并执行该程序。在这种情况下,程序和存储程序的存储介质构成本发明。
尽管已经参考示例性实施例描述了本发明,但是应该理解,本发明不限于所公开的示例性实施例。对下列权利要求的范围应作最广义的解释,从而涵盖所有变型以及等同的结构和功能。
本申请要求申请日为2022年3月30日的日本专利申请No.2022-055910的权益以及申请日为2022年3月30日的日本专利申请No.2022-055284的权益,所述日本专利申请在此通过引用整体并入本文。
- 一种光学透镜及具有该光学透镜的照明装置
- 透镜移动装置及包括透镜移动装置的摄像头模块和光学装置
- 透镜移动装置及包括透镜移动装置的摄像头模块和光学装置