一种智能配送的医疗内镜管传送机器人
文献发布时间:2023-06-19 18:30:43
技术领域
本发明涉及输送机器人技术领域,具体为一种智能配送的医疗内镜管传送机器人。
背景技术
智能配送机器人在院区内主要承担送药、送餐进隔离区以及回收被服和医疗垃圾的工作,它们通过“脑部”控制中心的智能调度,即可实现自主开关门、自主搭乘电梯、自主避障、自主充电等功能,无需人员操作,柜子里安装了紫外消毒灯,可以随时保持箱体及物品的安全,机器人还具备远程实时语音视频通信功能,可以通过调度系统与隔离病房的护士或病人直接交流。运送药品机器人可代替护士送饭、送病例和化验单等。
配送机器人通常只在园区内进行工作,但院区内行人较多,路线复杂,但现有的机器人底部的移动结构,通常为四轮驱动方式进行移动,而此方式需要前方控制方向后方提供动力,但此方式,难以在较为苛刻的环境下实现调转功能,不够灵活,容易造成运输死角。
发明内容
本发明提供了一种智能配送的医疗内镜管传送机器人,具备灵活移动快速调头的有益效果,解决了上述背景技术中所提到配送机器人通常只在园区内进行工作,但院区内行人较多,路线复杂,但现有的机器人底部的移动结构,通常为四轮驱动方式进行移动,而此方式需要前方控制方向后方提供动力,但此方式,难以在较为苛刻的环境下实现调转功能,不够灵活,容易造成运输死角的问题。
本发明提供如下技术方案:一种智能配送的医疗内镜管传送机器人,包括支撑外壳体和支撑外壳体内的存储箱体,所述支撑外壳体的下端设有圆轴底座,所述圆轴底座一侧设有红外传感器,所述圆轴底座内部安装有动力驱动结构,所述动力驱动结构的内部安装有防滑结构,所述动力驱动结构包括支撑壳体、转向内轴、联动齿轮、从动齿轮、第一电机和驱动齿轮,所述支撑壳体的内部安装有转向内轴,所述转向内轴内部的上端安装有第一电机,所述第一电机的一端安装有驱动齿轮,所述驱动齿轮的下端安装有从动齿轮,所述从动齿轮的下端安装有联动齿轮,所述联动齿轮用于安装在防滑结构的一侧,所述转向内轴的上端安装有弹簧。
作为本发明所述智能配送的医疗内镜管传送机器人的一种可选方案,其中:所述支撑壳体的上端安装有转向结构,所述转向结构包括驱动转轴、第二电机、驱动横轮和配合齿轮,所述支撑壳体的上端安装有驱动转轴,所述驱动转轴的外侧安装有位于支撑壳体上端的配合齿轮,所述配合齿轮的一侧安装有第二电机,所述第二电机的下端安装有驱动横轮,所述驱动横轮用于与配合齿轮的外侧啮合传动。
作为本发明所述智能配送的医疗内镜管传送机器人的一种可选方案,其中:所述转向结构还包括配合齿轮、侧边竖槽、内轴圈和定位轮轴,所述驱动转轴的外侧设有侧边竖槽,所述配合齿轮的轴心位置设有内轴圈,所述内轴圈的内部设有滑销,所述滑销用于滑动在侧边竖槽内,所述内轴圈用于同时提供驱动转轴与配合齿轮之间扭矩传递以及上下滑动支撑,所述配合齿轮的另一侧安装有两个定位轮轴,两个所述定位轮轴用于定位内轴圈的限位高度,所述支撑壳体的下端安装有配重块,所述圆轴底座的下端环形阵列有四个万向轮。
作为本发明所述智能配送的医疗内镜管传送机器人的一种可选方案,其中:所述驱动转轴的外侧安装有位于转向内轴上端的抗震结构,所述抗震结构包括支撑内圈、支撑内架、压力流道和配合腔体,所述支撑内圈的内部安装有支撑内架,所述支撑内架的内部设有压力流道,所述支撑内架的外侧与支撑内圈内壁之间设有腔体,所述腔体为配合腔体,所述支撑内架的上端安装有轴承。
作为本发明所述智能配送的医疗内镜管传送机器人的一种可选方案,其中:所述抗震结构还包括气压隔板、油压腔体和气压腔体,所述支撑内架的下端安装有气压隔板,所述气压隔板的上方与支撑内架下端之间设有空腔,所述空腔为油压腔体,所述气压隔板的下方设有气压腔体,所述气压隔板内部填充有油液,所述气压腔体的内部填充有气体。
作为本发明所述智能配送的医疗内镜管传送机器人的一种可选方案,其中:所述支撑内架的内部还设有侧边腔体,所述侧边腔体的内部安装有密封推杆,所述密封推杆的一端安装有位于侧边腔体内的橡胶隔膜。
作为本发明所述智能配送的医疗内镜管传送机器人的一种可选方案,其中:所述防滑结构包括内轮、支撑横轴和支撑架,所述内轮的内部设有支撑横轴,所述支撑横轴的一端用于与联动齿轮固定,所述内轮的外侧安装有外轮,所述支撑架用于支撑内轮与支撑横轴。
作为本发明所述智能配送的医疗内镜管传送机器人的一种可选方案,其中:所述外轮的外侧呈环形阵列对称安装有微型吸盘,所述外轮的外侧中间位置设有地面贴合环。
作为本发明所述智能配送的医疗内镜管传送机器人的一种可选方案,其中:所述地面贴合环的上端设有贴合面,所述地面贴合环的内部填充有气体,所述贴合面用于为地面贴合环提供支撑作用力。
作为本发明所述智能配送的医疗内镜管传送机器人的一种可选方案,其中:所述地面贴合环的内部设有支撑底座,所述支撑底座的两侧安装有定型架,所述定型架用于与地面贴合环的内壁贴合,所述支撑底座的外侧设有贴合弧面,所述贴合弧面用于支撑贴合面。
本发明具备以下有益效果:
1、该智能配送的医疗内镜管传送机器人,通过动力驱动结构与转向结构的配合,动力驱动结构为装置提供移动时的动力支持,而转向结构则能够装置在移动时的转动以及方向调节功能,且通过配合齿轮与驱动转轴的固定方式,使得转向内轴在浮动的同时也能实现扭矩的传动,通过动力驱动结构与转向结构两者的同时运转,则为装置提供移动以及转动效果,且两者内部结构可同时进行运转,使得装置在具备移动的同时,还能实现转向效果,且动力驱动结构与转向结构为同一轴心位置,使得装置的转向方式,极为灵活,并且无转向死角,使得装置能够应对一些特殊环境的输送作用,使装置的通过性和输送方式以及输送路线更为灵活。
2、该智能配送的医疗内镜管传送机器人,通过支撑内架下压对油压腔体内部油液形成挤压,使其经过压力流道流入配合腔体内,油液经过压力流道内部时,具有一定的阻力,而此阻力则对经过的油液形成干涉作用,减缓油液流动的同时对支撑内架的下压作用力形成抵消作用,同时部分油液还会流入密封推杆外侧空间内,对密封推杆形成压力,并将橡胶隔膜向前推动,使橡胶隔膜向压力流道内部涨开,通过两个橡胶隔膜同时涨开,使经过压力流道内部的油压增大,进一步增加支撑内架所能吸收的作用力,而液压方式承受力较强,但其初步与下压力进行接触时,其浮动速度较为缓慢,使得初步接触较为迟滞,造成顿挫感,而气压腔体为气压支撑状况,相较于液压方式,其上下浮动速度较快,能够对下压力进行初步吸收,两者液压以及气压结构,使得装置对于下压力进行吸收时,呈阶梯式对压力进行削弱,用以保证装置在运输医疗内镜管时的稳定环境。
3、该智能配送的医疗内镜管传送机器人,当贴合面受到压力后,向内收缩,使其内壁与贴合弧面的上表面贴合,当贴合面收缩后,其外表面呈平齐状态,此时与底面接触的面积增大,同时摩擦力也随之增大,使装置在移动的过程中能够实现防滑效果,同时微型吸盘还能对地面形成吸附效果,使外轮在镜面环境以及在含有水渍的情况下也能实现防滑功能。
附图说明
图1为本发明整体的结构示意图。
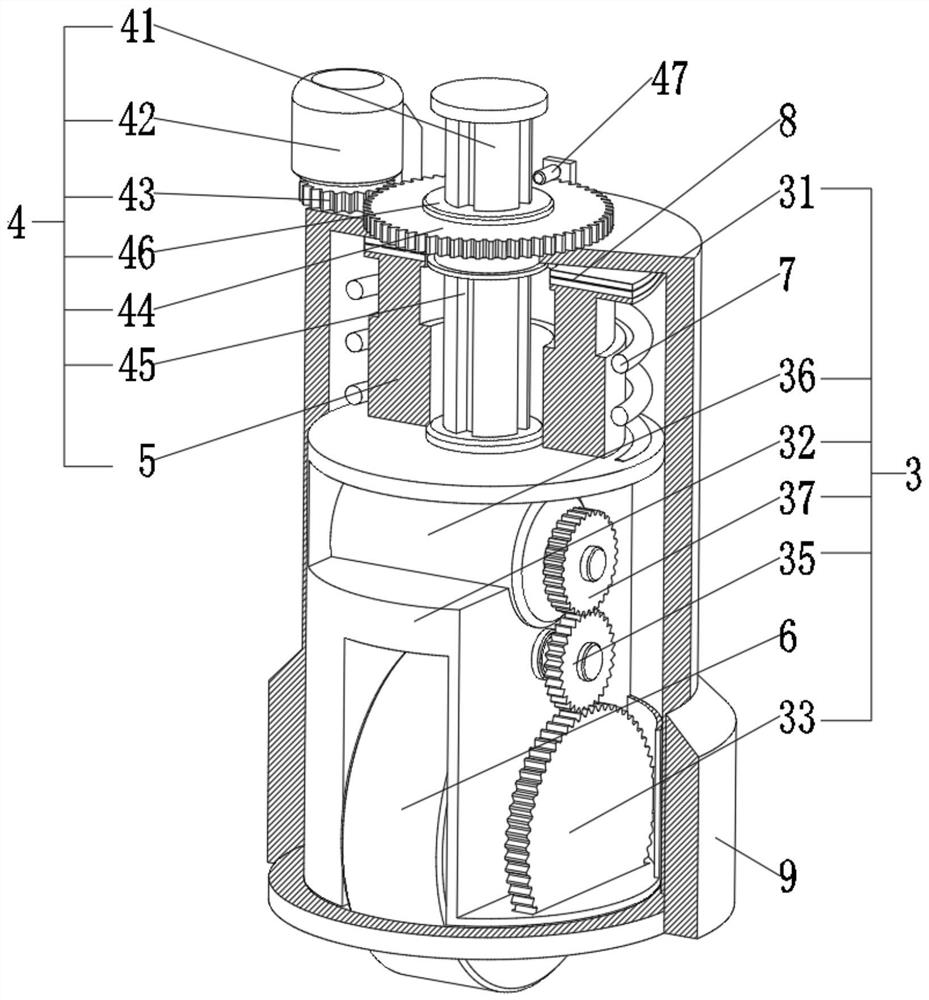
图2为本发明动力驱动结构与转向结构示意图。
图3为本发明动力驱动结构与转向结构底部示意图。
图4为本发明抗震结构示意图。
图5为本发明防滑结构示意图。
图6为本发明地面贴合环内部结构示意图。
图中:1、支撑外壳体;2、存储箱体;3、动力驱动结构;31、支撑壳体;32、转向内轴;33、联动齿轮;35、从动齿轮;36、第一电机;37、驱动齿轮;4、转向结构;41、驱动转轴;42、第二电机;43、驱动横轮;44、配合齿轮;45、侧边竖槽;46、内轴圈;47、定位轮轴;5、抗震结构;51、支撑内圈;52、支撑内架;53、压力流道;54、配合腔体;55、气压隔板;56、油压腔体;57、气压腔体;58、侧边腔体;59、密封推杆;60、橡胶隔膜;6、防滑结构;61、内轮;62、支撑横轴;63、外轮;64、微型吸盘;65、地面贴合环;66、贴合面;67、支撑底座;68、定型架;69、贴合弧面;70、支撑架;7、弹簧;8、轴承;9、配重块;10、圆轴底座;11、万向轮;12、红外传感器。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
请参阅图1-图6,其中一种智能配送的医疗内镜管传送机器人,包括支撑外壳体1和支撑外壳体1内的存储箱体2,支撑外壳体1的下端设有圆轴底座10,圆轴底座10一侧设有红外传感器12,圆轴底座10内部安装有动力驱动结构3,动力驱动结构3的内部安装有防滑结构6,动力驱动结构3包括支撑壳体31、转向内轴32、联动齿轮33、从动齿轮35、第一电机36和驱动齿轮37,支撑壳体31的内部安装有转向内轴32,转向内轴32内部的上端安装有第一电机36,第一电机36的一端安装有驱动齿轮37,驱动齿轮37的下端安装有从动齿轮35,从动齿轮35的下端安装有联动齿轮33,联动齿轮33用于安装在防滑结构6的一侧,转向内轴32的上端安装有弹簧7;
支撑壳体31的上端安装有转向结构4,转向结构4包括驱动转轴41、第二电机42、驱动横轮43和配合齿轮44,支撑壳体31的上端安装有驱动转轴41,驱动转轴41的外侧安装有位于支撑壳体31上端的配合齿轮44,配合齿轮44的一侧安装有第二电机42,第二电机42的下端安装有驱动横轮43,驱动横轮43用于与配合齿轮44的外侧啮合传动;
转向结构4还包括配合齿轮44、侧边竖槽45、内轴圈46和定位轮轴47,驱动转轴41的外侧设有侧边竖槽45,配合齿轮44的轴心位置设有内轴圈46,内轴圈46的内部设有滑销,滑销用于滑动在侧边竖槽45内,内轴圈46用于同时提供驱动转轴41与配合齿轮44之间扭矩传递以及上下滑动支撑,配合齿轮44的另一侧安装有两个定位轮轴47,两个定位轮轴47用于定位内轴圈46的限位高度,支撑壳体31的下端安装有配重块9,圆轴底座10的下端环形阵列有四个万向轮11。
驱动原理:通过第一电机36驱动驱动齿轮37,并带动从动齿轮35转动,再由从动齿轮35与联动齿轮33齿槽啮合传输动力,为防滑结构6提供行进动力,同时第二电机42驱动驱动横轮43转动,再由驱动横轮43为配合齿轮44提供转动扭矩,同时配合齿轮44与驱动转轴41为滑槽连接方式,配合齿轮44转动的同时带动驱动转轴41转动,从而通过驱动转轴41为转向内轴32提供转动动力支持,并且通过动力驱动结构3与转向结构4内部结构的同时运转,使装置在行进的同时还能具备转向功能;
当支撑外壳体1在移动时,动力驱动结构3为装置提供行进的动力支持,而转向结构4在为转向内轴32提供转向作用的同时,并且转向内轴32位于支撑壳体31内部时,具备上下活动功能,并通过弹簧7对转向内轴32的上表面与支撑壳体31内壁的顶端之间进行支撑,为两者之间提供弹性效果,并对转向内轴32始终提供下压力,且内轴圈46的内壁呈环形卡合在侧边竖槽45的内部,使得转向内轴32在上下浮动的同时,侧边竖槽45活动在内轴圈46的内部,且配合齿轮44通过两个定位轮轴47定位高度,保证配合齿轮44始终位于指定的高度工作,且圆轴底座10的内部安装有集成控制箱,且第一电机36与第二电机42以及红外传感器12均与集成控制箱电性连接,而红外传感器12型号为FT-H圆轴底座10,其原理是以红外传感器测距,采用三角测距的原理,红外发射器按照一定角度发射红外光束,遇到物体之后,光会反向回来,检测到反射光之后,向集成控制箱发送信号,接着集成控制箱切断对第一电机36的电力支持,从而使装置在移动的同时,起到配送时的智能避障作用。
实施例2
本实施例是在实施例1的基础上做出的改进,具体的,请参阅图1-图6,驱动转轴41的外侧安装有位于转向内轴32上端的抗震结构5,抗震结构5包括支撑内圈51、支撑内架52、压力流道53和配合腔体54,支撑内圈51的内部安装有支撑内架52,支撑内架52的内部设有压力流道53,支撑内架52的外侧与支撑内圈51内壁之间设有腔体,腔体为配合腔体54,支撑内架52的上端安装有轴承8;
抗震结构5还包括气压隔板55、油压腔体56和气压腔体57,支撑内架52的下端安装有气压隔板55,气压隔板55的上方与支撑内架52下端之间设有空腔,空腔为油压腔体56,气压隔板55的下方设有气压腔体57,气压隔板55内部填充有油液,气压腔体57的内部填充有气体;
支撑内架52的内部还设有侧边腔体58,侧边腔体58的内部安装有密封推杆59,密封推杆59的一端安装有位于侧边腔体58内的橡胶隔膜60。
当支撑内架52受到压力朝向支撑内圈51内部压缩时,对油压腔体56内的油液进行挤压,使油压腔体56内部形成高压状态,支撑内架52下压时,会扩张配合腔体54内部空间,且配合腔体54为密封状态,则对配合腔体54内部空间形成负压状态,此时油液会顺着压力流道53轨迹流入配合腔体54内部,而支撑内架52的下压力直接决定油液位于压力流道53内部时的流量压力,并且油液经过压力流道53内部时,具有一定的阻力,而此阻力则对经过的油液形成干涉作用,减缓油液流动的同时对支撑内架52的下压作用力形成抵消作用,从而实现对支撑内架52受到的压力实现缓冲作用;
且支撑内架52下压的同时,部分油液还会流入密封推杆59外侧空间内,对密封推杆59形成推动力,使密封推杆59对橡胶隔膜60形成推进动作,使橡胶隔膜60向压力流道53内部涨开,缩减压力流道53的行进空间,增大油液流动时的压力,进一步提高支撑内架52所能缓冲的压力值;
油压腔体56内部填充有油液,而气压腔体57内部有气体,且油液密度则大于气体密度,当支撑内架52下压对油压腔体56内部空间施压后,会首先对气压腔体57内部进行施压,并使气压隔板55向下移动,对支撑内架52的下压力进行吸收,而气压腔体57为气压支撑状况,相较于液压方式,其上下浮动速度较快,能够应对瞬间的压力吸收。
实施例3
本实施例是在实施例2的基础上做出的改进,具体的,请参阅图1-图6,防滑结构6包括内轮61、支撑横轴62和支撑架70,内轮61的内部设有支撑横轴62,支撑横轴62的一端用于与联动齿轮33固定,内轮61的外侧安装有外轮63,支撑架70用于支撑内轮61与支撑横轴62;
外轮63的外侧呈环形阵列对称安装有微型吸盘64,外轮63的外侧中间位置设有地面贴合环65;
地面贴合环65的上端设有贴合面66,地面贴合环65的内部填充有气体,贴合面66用于为地面贴合环65提供支撑作用力;
地面贴合环65的内部设有支撑底座67,支撑底座67的两侧安装有定型架68,定型架68用于与地面贴合环65的内壁贴合,支撑底座67的外侧设有贴合弧面69,贴合弧面69用于支撑贴合面66。
医院的地面常为瓷砖镜面,采用常规的橡胶所制成的底轮,能够满足大部分的支撑防滑效果,但地面难免会产生水渍以及其他液体,使轮体出现滑动状况,造成运输隐患;
当防滑结构6在移动时,受压力会直接作用在外轮63,通过支撑架70能够提供支撑作用,并且在移动时,最下端地面贴合环65会与地面接触,并将贴合面66向地面贴合环65内部收缩,并贴合在贴合弧面69的上表面,同时贴合面66呈平面状态,与地面接触面积增大,增加摩擦力,当外轮63持续转动时,使当前接触面脱离压力,且定型架68直接对地面贴合环65内壁的两侧提供支撑力,使贴合面66复位,同时最下端的微型吸盘64也会与地面接触,并且下压后,形成吸附状态,对外轮63外表面提供防滑效果,且此吸附力度,小于外轮63的滚动驱动力,使其不会影响外轮63的移动同时起到防滑效果。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 医疗检测胶囊内镜机器人上外壳注塑模具
- 医疗检测胶囊内镜机器人下外壳注塑模具