快速高精度电动调平收拢支腿及调平收拢方法
文献发布时间:2023-06-19 18:53:06
技术领域
本发明涉及特种车辆、特种设备、实验平台等军用和民用机电调平领域,特别是一种快速高精度电动调平收拢支腿及调平收拢方法。
背景技术
随着机电控制技术的发展,越来越多的精密设备均需要在具备更高精度和稳定性的平台上工作,尤其是对于雷达、消防设备等特种设备,特种运输车、特种设备车等特种车辆以及高精度的实验平台等重要科研领域内的调平精度的要求越来越高,这使得调平系统的设计尤为关键。
现阶段,主要的调平方法有液压调平系统和电动调平系统两种,液压调平系统具有设备大、反应慢、环境适应性差、维修困难等缺点,而电动调平系统能够弥补类似缺点,实现调平的高精度和高稳定性。因此液压调平系统在一些高精度、高稳定性的领域内逐渐被电动调平收拢支腿替代。
目前的电动调平设备调平精度和调平速度主要由电机控制,电机如若同时实现高转速和高精度的要求,则对电机的性能要求极高,即电机的成本也极高,不适合作为电动调平设备的控制电机。目前市面上存在的常用电机无法实现高精度、高速的兼顾,所以常见的电动调平系统无法实现高稳定性和快速调平特性的兼顾,一些场合下,如特种车辆和特种设备,调平时间长短和调平精度的高低决定了设备的使用性能,高精度、高稳定性和快速调平特性的兼顾对于调平系统而言具有重大的意义。
发明内容
本发明的目的在于提供一种快速高精度电动调平收拢支腿及调平收拢方法,用于解决现有电动缸系统无法同时实现高精度、高稳定性和快速调平特性兼顾的技术问题。
本发明为解决上述技术问题采用以下技术方案:一种快速高精度电动调平收拢支腿,包含调平安装板、第一减速器、第二减速器、手摇应急机构、伺服电机、离合器、直流高速电机、电动缸和调平落地盘;
所述调平安装板为齿轮箱的端盖,调平安装板与所需调平的装备的调平支架匹配;
所述第一减速器、第二减速器分别与所述齿轮箱连接,所述手摇应急机构分别与第一减速器和直流高速电机连接;所述离合器分别与第二减速器、伺服电机连接;
所述电动缸位于伺服电机和直流高速电机之间,通过齿轮箱的齿轮啮合传动力矩,电动缸内采用丝杠传动方式,电机的输出动力通过齿轮箱齿轮啮合传动至丝杠,通过丝杠螺母和电动缸的活塞杆推动调平落地盘实现电动缸伸出和缩回运动。
进一步的,所述手摇应急机构通过手摇手柄转动,带动一对锥齿轮旋转,从而带动第一减速器和电动缸运转,所述手摇应急机构工作时,离合器处于脱离状态。
进一步的,所述手摇应急机构通过螺钉分别与第一减速器和直流高速电机连接。
进一步的,所述手摇应急机构输出轴与第一减速器输入轴通过轴键连接,直流高速电机输出轴与手摇应急机构的输入轴端通过轴键连接。
进一步的,所述第一减速器、第二减速器采用行星减速器。
进一步的,所述离合器采用电磁式离合器,电磁离合器脱离状态下伺服电机与减速器处于脱离状态。
进一步的,所述电动缸上设有限位开关,防止电动缸活塞杆伸缩超限位。
进一步的,所述直流高速电机、伺服电机均具备抱闸自锁功能。
进一步的,所述调平落地盘与电动缸底端用防尘罩防护。
本发明还提供一种快速高精度电动调平收拢方法,特种设备或实验平台通过调平支架与调平安装板匹配安装n条快速高精度电动调平收拢支腿,n≥2,控制器控制n条调平收拢支腿,采用倾角传感器反馈调平精度;
调平方法如下:系统正常工作状态下,控制器控制n条快速高精度电动调平收拢支腿的直流高速电机、伺服电机解除制动抱闸,电磁离合器处于脱离状态,直流高速电机介入工作,直流高速电机旋转带动调平底盘伸出,直至n条快速高精度电动调平收拢支腿的调平底盘触地;
所述n条快速高精度电动调平收拢支腿的调平底盘触地后,直流高速电机停止工作,离合器闭合,高精度伺服电机介入工作,进行n条电动缸调平收拢支腿的调平,通过倾角传感器反馈调平精度信号,控制器控制调平收拢支腿精准调平,完成高精度调平后,直流高速电机、伺服电机开启制动抱闸,完成调平任务;
收拢方法如下:系统正常工作状态下,伺服电机介入工作,离合器闭合,直流高速电机、伺服电机解除抱闸,控制器控制n条电动缸调平收拢支腿的调平落地盘随伺服电机缓慢收拢至无负载情况下,离合器脱离,伺服电机停止工作;直流高速电机介入工作,n条电动缸调平收拢支腿的调平落地盘快速收拢至设置位置,直流高速电机、伺服电机开启制动抱闸,完成收拢任务。
与现有技术相比,本发明的有益效果为:
(1)本发明的快速高精度电动调平收拢支腿可实现在较低成本的条件下,节省调平和收拢时间,完成高精度和高稳定性的调平收拢工作。
(2)本发明的快速高精度电动调平收拢方法,利用将n条快速高精度电动调平收拢支腿安装至设备(试验平台、车载设备等)上,通过控制器联调n条电动调平收拢支腿同时工作,利用双电机控制方式,在无负载下,采用直流高速电机,实现电动调平收拢支腿的快速伸出和缩回;在负载(调平落地盘接地面后)下,通过伺服电机进行精准缓慢调平,同时由倾角传感器反馈调平精度至控制器,由控制器修正调平精度,最终实现设备快速、高精度的调平。
附图说明
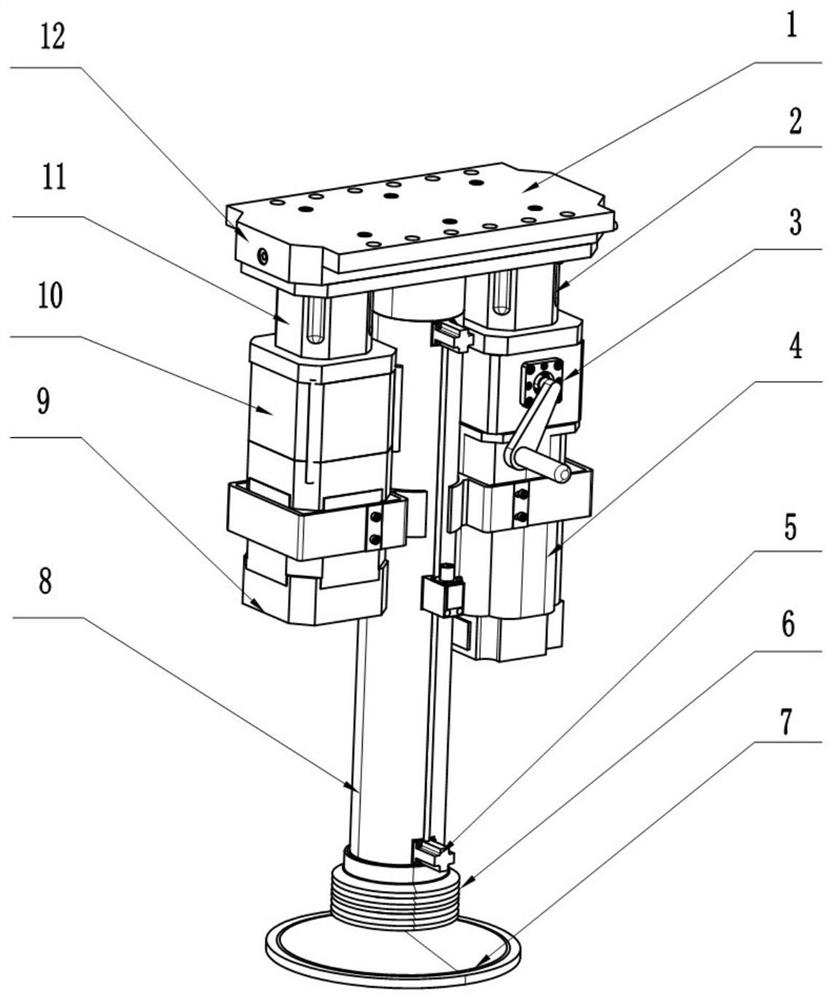
图1是本发明一种快速高精度电动调平收拢支腿外形图。
图2是根据本发明一种快速高精度电动调平收拢支腿手摇应急机构剖视图。
图3是根据本发明一种快速高精度电动调平收拢支腿齿轮箱和电动缸剖视图。
图4是根据本发明一种快速高精度电动调平收拢支腿及调平收拢方法的一种实验平台应用实例
图中,1-调平安装板,2-第一减速器,3-手摇应急机构,4-直流高速电机,5-限位开关,6-防尘罩,7-调平落地盘,8-电动缸,9-伺服电机,10-离合器,11-第二减速器,12-齿轮箱,13-手摇手柄,14-第一锥齿轮,15-手摇输出轴,16-第二锥齿轮,17-电机输出轴,18-齿轮箱齿轮,19-丝杠,20-丝杠螺母,21-活塞杆,22-倾角传感器,23-驱动器,24-快速高精度电动调平收拢支腿。
具体实施方式
下面结合附图对本发明的技术方案做进一步的详细说明:
本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且向本领域技术人员充分表达本发明的范围。在附图中,为了清楚本发明的结构特点,放大了组件并对部分组件外壳进行了剖视。
如图1所示,本发明公开了一种快速高精度调平收拢支腿及调平收拢方法,应用于特种设备、特种车辆等设备的调平和收拢,包括快速高精度电动调平收拢支腿、快速高精度调平收拢方法。
所述快速高精度电动调平收拢支腿24,包含调平安装板1、第一减速器2、第二减速器11、手摇应急机构3、伺服电机9、离合器10、直流高速电机4、电动缸8、调平落地盘7、防尘罩6。
所述2个减速器分别与所述齿轮箱12连接,减速器输出轴与齿轮箱内齿轮通过轴键连接,所述手摇应急机构3通过螺钉与一侧的第一减速器2连接,手摇应急机构输出轴15与第一减速器2输入轴通过轴键连接,所述直流高速电机4的输出轴17与手摇应急机构3的输入轴端通过轴键连接。
所述离合器10为电磁式离合器,离合器输出轴与另一侧的第二减速器11的输入轴通过轴键连接,所述伺服电机9输出轴与离合器10的输入轴通过轴键连接。
如图2所示,所述手摇应急机构3设置手摇手柄13,当电机存在故障时,通过手摇手柄转动一对啮合的锥齿轮14、16转动手摇应急机构的输出轴15,实现应急解决电动缸收拢功能。
如图3所示,所述电动缸位于伺服电机9和直流高速电机4之间,所述直流高速电机和伺服电机均具备抱闸自锁功能,可以实现在抱闸功能下,调平系统的可靠、稳定。
所述电动缸采用丝杠19传动,电机的输出动力通过齿轮箱齿轮18啮合传动至丝杠19,通过丝杠螺母20和电动缸的活塞杆21推动调平落地盘实现电动缸伸出和缩回运动。
所述电动缸上设有限位开关5,以防止电动缸活塞杆伸缩超限位,所述调平落地盘与电动缸底端设有防尘罩6防护。
本发明还提供一种快速高精度调平收拢方法,包括调平方法和收拢方法。
所述调平方法:如图4所示,特种设备或实验平台通过调平支架与调平安装板匹配安装n条(n≥2)快速高精度电动调平收拢支腿,系统正常工作状态下,控制器23控制n条快速高精度电动调平收拢支腿24的直流高速电机和伺服电机解除制动抱闸,电磁离合器处于脱离状态,直流高速电机介入工作,带动活塞杆和调平落地盘7快速伸出,直至触地。
所述n条快速高精度电动调平收拢支腿的调平底盘触地后,直流高速电机停止工作,离合器快速闭合,伺服电机介入工作,进行n条快速高精度电动调平收拢支腿调平,通过倾角传感器22反馈调平精度信号,控制器控制调平收拢支腿精准调平,完成高精度调平后,直流高速电机和伺服电机开启制动抱闸,完成调平任务。
所述收拢方法:特种设备的n条(n≥2)快速高精度电动调平收拢支腿处于调平后的状态,系统正常工作时,控制器控制n条快速高精度电动调平收拢支腿的离合器闭合,伺服电机介入工作,直流高速电机和伺服电机解除抱闸,调平落地盘随伺服电机收拢至无负载情况下,离合器脱离,伺服电机停止工作;直流高速电机介入工作,带动活塞杆和调平底盘快速收拢至设置位置,直流高速电机和伺服电机开启制动抱闸,完成收拢任务。
本发明采用快速高精度电动调平收拢支腿在低成本的条件下,节省设备的调平和收拢时间,并实现调平的高精度和高稳定性。
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
以上所述的具体实施方式,仅为本发明的一种示例,并对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种四点支撑载车电动柔顺调平控制方法
- 调平支腿油缸机构、调平支腿油缸液压单元和工程机械
- 支腿调平方法和支腿调平系统