基于关节驱动负载的喷涂机器人安装位置确定方法及装置
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及工业机器人应用技术领域,特别涉及一种基于关节驱动负载的喷涂机器人安装位置确定方法及装置。
背景技术
表面喷涂是航空航天和汽车制造领域的关键技术,如果表面涂层质量不过关,在复杂环境中长期使用将会引起涂层的老化、腐蚀甚至脱落,从而带来安全隐患。为提升表面喷涂质量,以喷涂机器人为核心设备的自动化喷涂系统已经广泛应用于各大制造领域,相对于人工喷涂而言,机器人的喷涂效率更高、安全性更有保障,同时机器人的设计、优化、调试、应用等过程均可通过理论研究实现流程化、精准化。
出于运行安全与控制方便的考虑,在对给定的喷涂任务进行机器人结构设计或者对通用机器人进行选型时,必须保证机器人末端执行器的运动范围能够完全覆盖工作任务要求且留有安全余量,因此喷涂机器人的可达工作空间总是要大于任务工作空间的范围。在机器人设计或选型完成后,工件与机器人的相对安装间距决定了机器人实际执行任务时的运动范围在其全部可达工作空间中的相对位置。机器人是复杂的多轴耦合机电系统,其驱动关节的负载具有显著的时变特征,当末端执行器的位姿改变时,各支链姿态与惯量相应变化,从而使得电机需要提供的驱动力矩发生变化。在工作空间中的某些位置上,机器人的驱动负载可能会显著上升,提高运行成本,动力学行为的剧烈变化为控制精度保证带来困难,甚至可能引起机器人失稳。在工程实际和现有研究中还没有一种考虑机器人动力学负载特性的工作空间优化与安装调试方法。
发明内容
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
为此,本发明的一个目的在于提出一种基于关节驱动负载的喷涂机器人安装位置确定方法,该方法可以减少因负载剧烈变化而引起的运动精度波动,保障自动化喷涂系统的表面涂装质量。
本发明的另一个目的在于提出一种基于关节驱动负载的喷涂机器人安装位置确定装置。
为达到上述目的,本发明一方面实施例提出了一种基于关节驱动负载的喷涂机器人安装位置确定方法,包括:
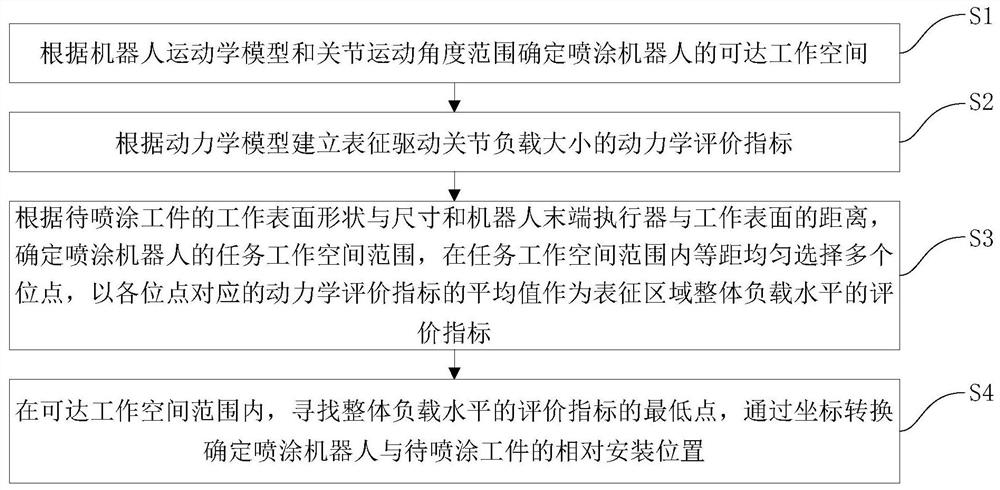
S1,根据机器人运动学模型和关节运动角度范围确定喷涂机器人的可达工作空间;
S2,根据动力学模型建立表征驱动关节负载大小的动力学评价指标;
S3,根据待喷涂工件的工作表面形状与尺寸和机器人末端执行器与工作表面的距离,确定喷涂机器人的任务工作空间范围,在所述任务工作空间范围内等距均匀选择多个位点,以各位点对应的动力学评价指标的平均值作为表征区域整体负载水平的评价指标;
S4,在所述可达工作空间范围内,寻找所述整体负载水平的评价指标的最低点,通过坐标转换确定喷涂机器人与所述待喷涂工件的相对安装位置。
为达到上述目的,本发明另一方面实施例提出了一种基于关节驱动负载的喷涂机器人安装位置确定装置,包括:
第一确定模块,用于根据机器人运动学模型和关节运动角度范围确定喷涂机器人的可达工作空间;
第二确定模块,用于根据动力学模型建立表征驱动关节负载大小的动力学评价指标;
第三确定模块,用于根据待喷涂工件的工作表面形状与尺寸和机器人末端执行器与工作表面的距离,确定喷涂机器人的任务工作空间范围,在所述任务工作空间范围内等距均匀选择多个位点,以各位点对应的动力学评价指标的平均值作为表征区域整体负载水平的评价指标;
第四确定模块,用于在所述可达工作空间范围内,寻找所述整体负载水平的评价指标的最低点,通过坐标转换确定喷涂机器人与所述待喷涂工件的相对安装位置。
本发明实施例的基于关节驱动负载的喷涂机器人安装位置确定方法及装置,有益效果为:充分考虑机器人的驱动负载时变特征,在机器人设计或者选型完成后,通过调整机器人与工件的相对安装间距,使得机器人在实际执行任务时的运动范围总是处于可达工作空间中负载水平较低的区域,从而减少因负载剧烈变化而引起的运动精度波动,保障自动化喷涂系统的表面涂装质量。
本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
图1为根据本发明一个实施例的基于关节驱动负载的喷涂机器人安装位置确定方法流程图;
图2为根据本发明一个实施例的基于关节驱动负载的喷涂机器人安装位置确定方法流程框图;
图3为根据本发明一个实施例的五轴混联喷涂机器人结构示意图;
图4为根据本发明一个实施例的机器人的可达工作空间示意图;
图5为根据本发明一个实施例的待喷涂工件及任务工作空间示意图;
图6为根据本发明一个实施例的区域整体负载评价指标在工作空间中的分布;
图7为根据本发明一个实施例的机器人与工件的相对安装位置示意图;
图8为根据本发明一个实施例的使用本发明确定的安装位置安装机器人后的典型轨迹的驱动负载曲线与对照组的驱动负载曲线;
图9为根据本发明一个实施例的基于关节驱动负载的喷涂机器人安装位置确定装置结构示意图。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
下面参照附图描述根据本发明实施例提出的基于关节驱动负载的喷涂机器人安装位置确定方法及装置。
首先将参照附图描述根据本发明实施例提出的基于关节驱动负载的喷涂机器人安装位置确定方法。
图1为根据本发明一个实施例的基于关节驱动负载的喷涂机器人安装位置确定方法流程图。
图2为根据本发明一个实施例的基于关节驱动负载的喷涂机器人安装位置确定方法流程框图。
结合图1和图2所示,该基于关节驱动负载的喷涂机器人安装位置确定方法包括以下步骤:
步骤S1,根据机器人运动学模型和关节运动角度范围确定喷涂机器人的可达工作空间。
进一步地,基于矢量环法建立喷涂机器人的正运动学模型,根据给定的机构几何参数与驱动关节的运动角度范围,求取机器人末端执行器的运动范围,即为机器人的可达工作空间S
步骤S2,根据动力学模型建立表征驱动关节负载大小的动力学评价指标。
进一步地,基于虚功原理建立喷涂机器人的动力学模型,并将之写成具有惯量项、离心力与科氏力项和重力项等分量的形式:
其中,τ=[τ
基于得到的机器人动力学模型,为表征机器人在某一位姿下可能具有的最大驱动负载,设计某一驱动关节的负载水平评价指标如下:
其中,i为机器人的驱动关节序号,M
具体地,单关节驱动负载评价指标设计方法,通过引入具有驱动关节角加速度形式的量,如所述的全部驱动关节的最大角加速度设计值
步骤S3,根据待喷涂工件的工作表面形状与尺寸和机器人末端执行器与工作表面的距离,确定喷涂机器人的任务工作空间范围,在任务工作空间范围内等距均匀选择多个位点,以各位点对应的动力学评价指标的平均值作为表征区域整体负载水平的评价指标。
进一步地,根据待喷涂工件的表面形状与尺寸,以及机器人末端执行器(喷枪口)与工作表面的喷涂间距要求d
基于得到的机器人任务工作空间S
其中,s为选择的位点的个数,DLI
具体地,机器人任务工作空间求取方法,在喷涂工作中,需保证喷枪轴线始终垂直于工件表面且喷枪口距工件表面的距离为一定值,因此从工件表面各点出发做以喷涂间距d
具体地,区域整体负载评价指标设计方法,以任务工作空间中某一位点为基准,等距均匀地选择若干位点,计算各个位点相对应的各个驱动关节负载评价指标之和的平均值,用于表征该区域的整体负载水平。各位点坐标均可使用基准位点的坐标以及其与基准位点的相对位置表示,从而提出的区域整体负载评价指标为基准位点坐标的函数。
步骤S4,在可达工作空间范围内,寻找整体负载水平的评价指标的最低点,通过坐标转换确定喷涂机器人与待喷涂工件的相对安装位置。
进一步地,基于提出的区域整体负载评价指标,求取其在可达工作空间S
基于得到的区域整体负载评价指标最小值的坐标,结合机器人末端执行器(喷枪口)与工作表面的喷涂间距要求、工件与地面的摆放高度、机器人坐标系原点与其安装点的相对位置等数据,求取机器人安装点与工件的相对水平距离D与竖直距离H,从而确定喷涂机器人较优的安装位置。
如图3所示,该机器人共有五个驱动电机,实现末端执行器五个自由度的运动,滑块2在移动导轨1上运动带动机器人其余部分做平动,转台3实现其上的平面并联机构绕竖直轴的转动,在平面并联机构中,驱动臂4、驱动臂5的旋转通过平行四边形连杆机构的传导实现末端执行器7即喷枪的移动,驱动臂6的旋转通过平行四边形连杆机构的传导实现喷枪角度的调整。机器人沿导轨方向的定位可以通过驱动滑块2实现,且在机器人在导轨上不同位置时其驱动负载特性不会改变,因此本实施例将计算投影至与导轨垂直的平面内的可达工作空间。
如图4所示,展示了基于机器人结构参数得到的机器人在投影平面内的可达工作空间,各个关节的运动范围设定为驱动臂4为θ
基于虚功原理建立机器人的动力学模型,并将之写为包含不同分量的形式,其解析表达式为:
其中,τ为各个驱动关节的驱动力矩组成的向量,M(q)为惯量矩阵,
其中,J
为表征机器人在某一位姿时的驱动负载水平,提出单关节驱动负载评价指标如下:
其中,M
如图5所示,为待喷涂工件及其任务工作空间示意图,该工件为飞机尾翼的一部分,视角为从机翼尾部到头部。一套自动化喷涂系统包括两台对称安装的喷涂机器人,分别负责工件的两个侧面,喷涂机器人的移动导轨与工件轴线均应保持平行放置,因此可达工作空间的投影平面也与工件轴线相垂直。工件在水平方向的最大跨度为l
基于单关节驱动负载评价指标,在任务工作空间中均匀地选择10个位点,如图5中q
其中,DLI
如图6所示,为区域整体负载评价指标在可达工作空间中的分布。由于本实施例中任务工作空间取其左上顶点为基准位点,因此该指标的分布区域只位于图4所示的机器人全部可达工作空间的顶端部分。根据仿真计算结果,可以得到评价指标最小时的基准位点坐标为q
如图7所示,为机器人与工件的相对安装位置示意图,其中D为水平安装间距,定义为机器人移动导轨轴线与工件中轴线的垂直距离,H为竖直安装间距,定义为机器人移动导轨安装平面与放置工件的最低点的竖直距离,h
D=x
H=y
基于上述求得的区域整体负载指标最小时的任务工作空间坐标,可以求得本实施例的机器人安装位置的具体数值为D=1.985m,H=-0.936m。H的负值表示工件放置的最低点位于机器人移动导轨安装平面之下。
参见图8,为以驱动臂4关节为例的典型运动轨迹的关节驱动力矩曲线。黑线(下方的线)代表使用本发明确定的机器人安装位置时的驱动力矩曲线,红线(上方的线)代表使用对照的安装位置时的驱动力矩曲线。可以看到,在实施本发明提出的喷涂机器人的安装位置确定方法后,机器人在实际运行时的驱动负载显著降低,负载变化范围相应减小,这一优化为机器人运动精度提升和精度波动降低奠定了基础,具有良好的实施效果。
根据本发明实施例提出的基于关节驱动负载的喷涂机器人安装位置确定方法,通过充分考虑喷涂机器人在工作空间运行时的驱动负载时变特征,从机器人动力学模型出发,提取能够反映机器人在某一位姿下的驱动关节最大负载的评价指标,并结合任务工作空间范围,建立能够表征区域内各关节整体负载水平的评价指标。基于评价指标在可达工作空间中的分布,寻找驱动负载水平整体较低的区域,进而求得机器人与工件的相对安装位置。该方法操作性强、准确度高,有效降低机器人运动时的驱动负载,同时减少了因负载剧烈变化而导致的运动精度波动。
其次参照附图描述根据本发明实施例提出的基于关节驱动负载的喷涂机器人安装位置确定装置。
图9为根据本发明一个实施例的基于关节驱动负载的喷涂机器人安装位置确定装置结构示意图。
如图9所示,该基于关节驱动负载的喷涂机器人安装位置确定方装置90包括:第一确定模块901、第二确定模块902、第三确定模块903和第四确定模块904。
第一确定模块901,用于根据机器人运动学模型和关节运动角度范围确定喷涂机器人的可达工作空间。
第二确定模块902,用于根据动力学模型建立表征驱动关节负载大小的动力学评价指标。
第三确定模块903,用于根据待喷涂工件的工作表面形状与尺寸和机器人末端执行器与工作表面的距离,确定喷涂机器人的任务工作空间范围,在任务工作空间范围内等距均匀选择多个位点,以各位点对应的动力学评价指标的平均值作为表征区域整体负载水平的评价指标。
第四确定模块904,用于在可达工作空间范围内,寻找整体负载水平的评价指标的最低点,通过坐标转换确定喷涂机器人与待喷涂工件的相对安装位置。
进一步地,在本发明的一个实施例中,第一确定模块,具体用于,基于矢量环法建立喷涂机器人的正运动学模型,根据给定的机构几何参数与驱动关节的运动角度范围,计算机器人末端执行器的运动范围,将运动范围作为喷涂机器人的可达工作空间。
进一步地,在本发明的一个实施例中,第四确定模块,具体用于,在可达工作空间范围内,求取区域整体负载评价指标的分布,寻找区域整体负载评价指标具有最小值时的基准位点坐标;
根据最小值时的基准位点坐标,结合机器人末端执行器与工作表面的喷涂间距要求、工件与地面的摆放高度、机器人坐标系原点与安装点的相对位置,求取机器人安装点与工件的相对水平距离与竖直距离,确定机器人的安装位置。
需要说明的是,前述对方法实施例的解释说明也适用于该实施例的装置,此处不再赘述。
根据本发明实施例提出的基于关节驱动负载的喷涂机器人安装位置确定装置,通过充分考虑喷涂机器人在工作空间运行时的驱动负载时变特征,从机器人动力学模型出发,提取能够反映机器人在某一位姿下的驱动关节最大负载的评价指标,并结合任务工作空间范围,建立能够表征区域内各关节整体负载水平的评价指标。基于评价指标在可达工作空间中的分布,寻找驱动负载水平整体较低的区域,进而求得机器人与工件的相对安装位置。操作性强、准确度高,有效降低机器人运动时的驱动负载,同时减少了因负载剧烈变化而导致的运动精度波动。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 基于关节驱动负载的喷涂机器人安装位置确定方法及装置
- 基于关节驱动负载的喷涂机器人安装位置确定方法及装置