基于一阶矢量扰动理论的多涂层目标偏振测量装置与方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及多涂层目标的探测与识别技术领域,具体涉及基于一阶矢量扰动理论的多涂层目标偏振测量装置与方法。
背景技术
近年来,随着现代高新技术的飞速发展,各领域目标材料层出不穷,这也同时促进了先进涂层材料的发展,加上自然环境不断恶化加剧,无疑增加了自然环境背景下目标探测与识别的难度。
目前,涂层目标研究热点集中于对单涂层目标的测量,对于多涂层目标的测量少之又少,实际应用当中大多数是以多涂层的形式出现,严重制约了涂层目标的探测识别的效果。现阶段探测方法层出不穷,其中,利用涂层目标光谱光学特性进行探测是一种常用的手段,但光谱探测同样也存在一些劣势,例如:(1)可见光波段,相较于红外波段灵敏度较低、光谱分析依赖于模型的选择;(2)对于同谱异物或者同物异谱的某些物体,光谱探测将失去作用,容易对目标进行误判;(3)由于野外复杂环境下,光谱测量易受到大气散射、天空漫反射以及背景辐射等因素的影响,从而限制了光谱探测在涂层目标探测与识别领域的重要发挥。目标被自然光或激光主动照明后,其反射信号会提供目标的光强图像无法显示的表面粗糙度,纹理走向,表面取向,材料理化特征等。因此,将偏振技术应用到涂层目标探测与识别,通过多维度探测技术相结合,不仅可以获取目标的强度信息和光谱信息,还可以获得目标的偏振信息。在复杂的自然背景环境中,通过偏振成像获得的偏振图像具有更丰富的信息。
常用于处理层状结构的粗糙表面散射的方法有:扰动法、基尔霍夫近似法、曲面积分法、扩展边界条件法等,它们广泛应用于光学、雷达成像、微波遥感、无线电波传播等领域。扰动理论又叫摄动理论,它通过一些特别的数学表达式来针对不具明确解的问题给出近似解,扰动理论分为一阶矢量扰动理论、二阶扰动理论等,一阶矢量扰动理论是处理散射问题的一个重要理论,对于多层涂层结构而言,由于其内部特性和多涂层之间的边界表面的不规则性,加重了对多涂层目标探测与识别的困难性。
因此,现有技术缺少对多涂层目标探测和识别。
发明内容
本发明解决了现有技术缺少对多涂层目标探测和识别的问题。
本发明所述的基于一阶矢量扰动理论的多涂层目标偏振测量装置,所述装置包括光源装置、偏振相机、接收装置、控制装置、静态测量导轨、机械转台、动态测量导轨、轴承支架和底座;
所述光源装置和接收装置均安装在动态测量导轨上;
所述偏振相机安装在静态测量导轨上;
所述光源装置、接收装置和机械转台均与控制装置连接;
所述静态测量导轨和动态测量导轨的两端均与轴承支架连接;
所述机械转台固定在轴承支架上;
所述轴承支架固定在底座上。
进一步地,在本发明的一个实施例中,所述光源装置和接收装置均沿动态测量导轨滑动。
进一步地,在本发明的一个实施例中,所述控制装置包括图像处理系统、控制光源系统、接收装置控制系统、机械转台控制系统和偏振特性分析系统;
所述图像处理系统处理图像;
所述控制光源系统控制光源装置;
所述接收装置控制系统控制接收装置;
所述机械转台控制系统控制机械转台;
所述偏振特性分析系统对数据进行处理和分析。
进一步地,在本发明的一个实施例中,所述静态测量导轨为1/4圆弧形导轨;
所述动态测量导轨为半圆弧形导轨;
所述静态测量导轨定点测量30°、40°、50°和60°的角度;
所述动态测量导轨动态测量-90°~90°之间的角度;
所述静态测量导轨和动态测量导轨有公共圆心。
进一步地,在本发明的一个实施例中,所述机械转台和轴承支架为一体式结构;
所述一体式结构通过控制装置对其进行高度调节。
进一步地,在本发明的一个实施例中,所述静态测量导轨、动态测量导轨和轴承支架均设置有角度标识;
所述静态测量导轨的角度标识为0°~90°,分度值为1°;
所述动态测量导轨的角度标识为-90°~90°,分度值为1°;
所述轴承支架的角度标识为0°~360°,分度值为1°。
本发明所述的基于一阶矢量扰动理论的多涂层目标偏振测量方法,所述方法是采用上述方法中任一所述的基于一阶矢量扰动理论的多涂层目标偏振测量装置实现的,包括以下步骤:
步骤S1,根据控制变量法依次改变基底、涂层和背景环境,形成不同的多涂层目标,并对不同的多涂层目标分别设置对照组实验;
步骤S2,将光源装置、接收装置和机械转台进行校准后,连接控制装置准备进行多涂层目标测试;
步骤S3,采用一阶矢量扰动理论计算出多涂层目标光散射问题,逐层求解多涂层目标的基底与每层间的穆勒矩阵,考虑多涂层目标间的瑞利散射缺陷,建立多涂层目标的pBRDF模型;
步骤S4,将已建立的pBRDF模型输入到控制装置中,控制装置对多涂层目标进行偏振实验观测和数据收集;
步骤S5,开始进行多涂层目标测试,固定光源装置的俯仰角,通过控制装置分别将接收装置的俯仰角和机械转台的方位角固定住后,控制装置获得第一次多涂层目标的偏振图片和数据,再次通过控制装置将机械转台的方位角进行旋转90°后,控制装置获得第二次多涂层目标的偏振图片和数据,将两次获得的多涂层目标的偏振图片和数据进行对比验证其可靠性;
步骤S6,改变光源装置的俯仰角,重复步骤S5,获得多涂层目标俯仰角不同的偏振图片和数据,通过控制装置将获得的多涂层目标俯仰角不同的偏振图片和数据进行处理得到实验测试数据。
进一步地,在本发明的一个实施例中,所述基底包括陶瓷、塑料、钢板和铝板;
所述涂层包括深绿色、绿色、黄绿色和黄棕色;
所述背景环境包括草地、泥土和沙土。
进一步地,在本发明的一个实施例中,所述对照组实验包括无涂层、单涂层、双涂层和5层涂层。
进一步地,在本发明的一个实施例中,所述采用一阶矢量扰动理论计算出多涂层目标光散射问题,逐层求解多涂层目标的基底与每层间的穆勒矩阵,考虑多涂层目标间的瑞利散射缺陷,建立多涂层目标的pBRDF模型,具体为:
采用偏振散射琼斯矩阵建立入射场与散射场之间的关系:
其中,
采用穆勒矩阵建立入射场与散射场的关系:
微粗糙界面多层膜的光散射BRDF定义为:
其中,
结合一阶矢量理论推导
其中,
考虑到多涂层目标间存在瑞利散射缺陷,假设将两个界面间看作是的半径为
其中,
考虑到多涂层目标表面的多源散射,建立偏振散射琼斯矩阵与穆勒矩阵的关系:
其中,
本发明解决了现有技术缺少对多涂层目标探测和识别的问题。具体有益效果包括:
1、本发明所述的基于一阶矢量扰动理论的多涂层目标偏振测量方法,基于一阶矢量扰动理论,考虑到多涂层目标之间存在的瑞利散射缺陷,结合穆勒矩阵,建立了新型的多涂层目标双向反射分布模型,用于对多涂层目标的探测识别与偏振特性的研究;
2、本发明所述的基于一阶矢量扰动理论的多涂层目标偏振测量方法,该方法通过获得不同涂层、不同基底的入射角、接收角以及方位角的多涂层目标偏振信息,并设置多组实验,提高获得的数据精度;
3、本发明所述的基于一阶矢量扰动理论的多涂层目标偏振测量方法,该方法通过对无涂层、单涂层、多涂层及其它地面目标或背景目标进行全部偏振参量探测,获取多涂层目标更为完善的全偏振特性;
4、本发明所述的基于一阶矢量扰动理论的多涂层目标偏振测量方法,结合动态测量与静态测量实时同步的测量方式,进一步验证实验测量数据的真实可靠性;
5、本发明所述的基于一阶矢量扰动理论的多涂层目标偏振测量方法,基于一阶矢量扰动理论,结合仿真与实验数据,得到并验证多涂层目标的偏振特性规律,为多涂层目标提供了建模研究基础。
附图说明
本发明上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
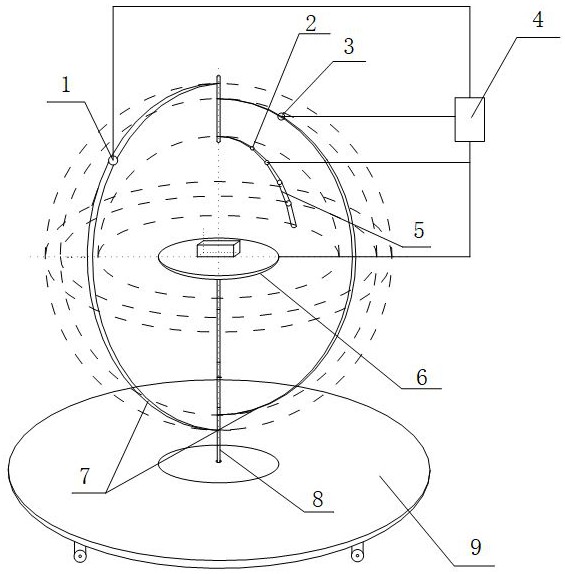
图1是具体实施方式所述的基于一阶矢量扰动理论的多涂层目标偏振测量装置结构示意图;
图2是具体实施方式所述的多涂层目标几何模型关系图;
图中,1为光源装置,2为偏振相机,3为接收装置,4为控制装置,5为静态测量导轨,6为机械转台,7为动态测量导轨,8为轴承支架,9为底座。
具体实施方式
下面结合附图将对本发明的多种实施方式进行清楚、完整地描述。通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
本实施方式所述的基于一阶矢量扰动理论的多涂层目标偏振测量装置,所述装置包括光源装置1、偏振相机2、接收装置3、控制装置4、静态测量导轨5、机械转台6、动态测量导轨7、轴承支架8和底座9;
所述光源装置1和接收装置3均安装在动态测量导轨7上;
所述偏振相机2安装在静态测量导轨5上;
所述光源装置1、接收装置3和机械转台6均与控制装置4连接;
所述静态测量导轨5和动态测量导轨7的两端均与轴承支架8连接;
所述机械转台6固定在轴承支架8上;
所述轴承支架8固定在底座9上。
本实施方式中,所述光源装置1和接收装置3均沿动态测量导轨7滑动。
本实施方式中,所述控制装置4包括图像处理系统、控制光源系统、接收装置控制系统、机械转台控制系统和偏振特性分析系统;
所述图像处理系统处理图像;
所述控制光源系统控制光源装置1;
所述接收装置控制系统控制接收装置3;
所述机械转台控制系统控制机械转台6;
所述偏振特性分析系统对数据进行处理和分析。
本实施方式中,所述静态测量导轨5为1/4圆弧形导轨;
所述动态测量导轨7为半圆弧形导轨;
所述静态测量导轨5定点测量30°、40°、50°和60°的角度;
所述动态测量导轨7动态测量-90°~90°之间的角度;
所述静态测量导轨5动态测量导轨7有公共圆心。
本实施方式中,所述机械转台6和轴承支架8为一体式结构;
所述一体式结构通过控制装置4对其进行高度调节。
本实施方式中,所述静态测量导轨5、动态测量导轨7和轴承支架8均设置有角度标识;
所述静态测量导轨5的角度标识为0°~90°,分度值为1°;
所述动态测量导轨7的角度标识为-90°~90°,分度值为1°;
所述轴承支架8的角度标识为0°~360°,分度值为1°。
本实施方式基于本发明所述的基于一阶矢量扰动理论的多涂层目标偏振测量装置,结合图1能更好的理解本实施方式,提供一种实际的实施方式:
所述装置包括光源装置1、偏振相机2、接收装置3、控制装置4、导轨、机械转台6、轴承支架8和底座9;
所述光源装置1与接收装置3均安装在导轨上;
所述光源装置1、接收装置3和机械转台6均由控制装置4控制;
所述机械转台为6圆形结构;
所述导轨为圆弧形导轨,其包括动态测量导轨7与静态测量导轨5,圆弧形导轨两端均与轴承支架8连接,动态测量导轨7可实现-90°~90°之间任意角度的动态测量,静态测量导轨5可实现30°、40°、50°和60°的定点测量;
所述轴承支架8与底座9相连,其上方固定连接机械转台6,所述轴承支架8处于中心位置,且与底座9垂直;
所述控制装置4设置有图像处理系统、控制光源系统、接收装置及载物台的程序系统和偏振特性分析系统,控制装置4包括计算机系统;
所述机械转台6与轴承支架8为一体式结构,该结构可通过控制装置4进行高度调节,实现该装置的矫正;
所述导轨和轴承支架8上均设置有角度标识,导轨包括两个半圆形导轨和一个1/4上半圆导轨,三个导轨具有公共圆心,上下两端连接轴承支架8,可绕轴承支架8移动进行装置矫正,半圆形导轨相对于水平面夹角从-90°~90°,间隔为1°,1/4上半圆导轨相对于水平面夹角从0°~90°,间隔为1°,轴承支架8角度标识从0°~360°,间隔为1°,用来获取不同测量入射角,接收角与方位角;
此装置可以在自然背景下多涂层目标的静态与动态数据的测量,获取不同测量方式数据加以验证,得到多涂层目标的偏振特性,对于其它地面目标,比如泥土、岩石、植被等,本装置也能识别并且通过控制装置4直接显示。
本实施方式所述的基于一阶矢量扰动理论的多涂层目标偏振测量方法,所述方法是采用上述实施方式中任一所述的基于一阶矢量扰动理论的多涂层目标偏振测量装置实现的,包括以下步骤:
步骤S1,根据控制变量法依次改变基底、涂层和背景环境,形成不同的多涂层目标,并对不同的多涂层目标分别设置对照组实验;
步骤S2,将光源装置1、接收装置3和机械转台6进行校准后,连接控制装置4准备进行多涂层目标测试;
步骤S3,采用一阶矢量扰动理论计算出多涂层目标光散射问题,逐层求解多涂层目标的基底与每层间的穆勒矩阵,考虑多涂层目标间的瑞利散射缺陷,建立多涂层目标的pBRDF模型;
步骤S4,将已建立的pBRDF模型输入到控制装置4中,控制装置4对多涂层目标进行偏振实验观测和数据收集;
步骤S5,开始进行多涂层目标测试,固定光源装置1的俯仰角,通过控制装置4分别将接收装置3的俯仰角和机械转台6的方位角固定住后,控制装置4获得第一次多涂层目标的偏振图片和数据,再次通过控制装置4将机械转台6的方位角进行旋转90°后,控制装置4获得第二次多涂层目标的偏振图片和数据,将两次获得的多涂层目标的偏振图片和数据进行对比验证其可靠性;
步骤S6,改变光源装置1的俯仰角,重复步骤S5,获得多涂层目标俯仰角不同的偏振图片和数据,通过控制装置4将获得的多涂层目标俯仰角不同的偏振图片和数据进行处理得到实验测试数据。
本实施方式中,所述基底包括陶瓷、塑料、钢板和铝板;
所述涂层包括深绿色、绿色、黄绿色和黄棕色;
所述背景环境包括草地、泥土和沙土。
本实施方式中,所述对照组实验包括无涂层、单涂层、双涂层和5层涂层。
本实施方式中,所述采用一阶矢量扰动理论计算出多涂层目标光散射问题,逐层求解多涂层目标的基底与每层间的穆勒矩阵,考虑多涂层目标间的瑞利散射缺陷,建立多涂层目标的pBRDF模型,具体为:
采用偏振散射琼斯矩阵建立入射场与散射场之间的关系:
其中,
采用穆勒矩阵建立入射场与散射场的关系:
微粗糙界面多层膜的光散射BRDF定义为:
其中,
结合一阶矢量理论推导
其中,
考虑到多涂层目标间存在瑞利散射缺陷,假设将两个界面间看作是的半径为
其中,
考虑到多涂层目标表面的多源散射,建立偏振散射琼斯矩阵与穆勒矩阵的关系:
其中,
本实施方式基于本发明所述的基于一阶矢量扰动理论的多涂层目标偏振测量方法,提供一种实际的实施方式:
步骤一、准备工作
根据控制变量法依次改变基底、涂层和背景环境,所述基底包括陶瓷、塑料、钢板和铝板,所述涂层包括深绿色、绿色、黄绿色和黄棕色涂层,所述背景环境包括草地、泥土和沙土,并设置无涂层、单涂层、双涂层和5层涂层形成测试实验对照组,将多涂层目标的机械转台6上,对光源装置、接收装置3和机械转台6进行校准,连接控制装置4进行多涂层目标特性测试;
步骤二、采用一阶矢量扰动理论,计算多涂层目标光散射问题,逐层求解多涂层目标的基底与每层间的传输穆勒矩阵,考虑多涂层目标间的瑞利散射缺陷,建立适用于多涂层目标的pBRDF(偏振双向反射分布函数)模型,将已建立的pBRDF模型输入到控制装置4中,控制装置4对多涂层目标进行偏振实验观测和数据收集,涉及相关理论与方法如下:
pBRDF是获取目标偏振探测信息的重要手段,可用偏振散射琼斯矩阵,建立入射场与散射场之间的关系:
其中,
用穆勒矩阵建立入射场与散射场的关系:
微粗糙界面多层膜的光散射BRDF(双向反射分布函数)定义为:
其中,
结合一阶矢量理论推导
其中,
考虑到多涂层目标间存在瑞利散射缺陷,假设将两个界面间看作是的半径为
其中,
考虑到涂层表面的多源散射,建立偏振散射琼斯矩阵与穆勒矩阵的关系:
其中,
通过上式,可以很容易地计算多个粗糙界面散射的穆勒矩阵,它适用于确定散射源的组合,包括确定多涂层目标界面之间的粗糙度是相关的、不相关的、还是部分相关的,如图2所示,其中,τ
步骤三、开始进行多涂层目标测试,固定光源装置1的俯仰角,利用控制装置4分别将接收装置3的俯仰角和机械转台6的方位角固定住后,控制装置4获得第一次多涂层目标的偏振图片和数据,再次,通过控制装置4控制机械转台6的方位角进行旋转90°后,控制装置4获得第二次多涂层目标的偏振图片和数据,将两次获得的多涂层目标的偏振图片和数据进行对比验证其可靠性,改变光源装置1的俯仰角,重复该步骤的过程,获得多涂层目标俯仰角不同的偏振图片和数据,通过控制装置4进行处理得到实验测试数据;
步骤四、采用计算机仿真与BRDF实验相结合的方式得到多涂层目标偏振特性规律,通过计算机仿真数据与实验数据形成对照,考虑分析多种因素影响下,典型涂层目标的偏振特性,研究包括不同涂层层数随散射角大小的强度变化与偏振度变化、不同涂层层数目标表面发射率随波长的变化、对于5层涂层不同基底的目标偏振度变化、对于5层涂层通过观测角与方位角的改变研究偏振度的变化,对比仿真结果与实验结果,分析得到多涂层目标与背景环境目标的偏振特性,验证多涂层目标偏振特性规律。
以上对本发明所提出的基于一阶矢量扰动理论的多涂层目标偏振测量装置与方法进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。