分液过程监测方法及系统、存储介质及终端
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及机器视觉的技术领域,特别是涉及一种分液过程监测方法及系统、存储介质及终端。
背景技术
在新药合成研发过程中,萃取分液、沉淀溶解与析出、色谱分析(薄层色谱、柱色谱)等操作需要依赖人眼进行长期的监视。其中,分液过程因不同程度的乳化现象不仅极为耗时,而且准确度高度依赖主观经验。利用视觉识别非均相液体相界面在饮料装灌和反应工程等领域的成功经验表明机器视觉辅助药物科学家实现无人值守分液操作具有较高的应用潜力。
吴泽等提出了一套液面状态识别算法,该算法可以对工业反应釜内液体状态的变化快速准确地识别,从而实现工业反应釜液面分离。其中,通过对工业反应釜中液面数据分析,将液面数据分成五种类别,采用的五种经典特征提取算法分别是局部二值模式(LocalBinary Pattern,LBP)、方向梯度直方图(Histogram of Oriented Gradient,HOG)、局部相位量化(Local Phase Quantization,LPQ)、Haar和颜色直方图,采用的分类器算法有支持向量机(Support Vector Machine,SVM)分类算法、随机森林分类算法和K最近邻(K-Nearest Neighbor,KNN)KNN分类算法。
在基于液面图像HOG特征的主成分分析(Principal Components Analysis,PCA)降维分类模型研究中,首先HOG特征提取算法用于提取液面特征时,由于该算法提取得到的液面数据特征维度过高,故使用PCA方法对HOG特征进行降维;然后将降维后的特征与LBP、LPQ、Haar特征提取算法形成的特征在上述三种分类器进行比较,得出PCA对HOG降维后的特征在KNN分类器中识别率最高达93.15%,最后研究了PCA贡献率对HOG特征提取方法的影响。
在基于自适应阈值方式对颜色直方图特征提取算法进行改进时,首先使用传统的颜色直方图特征提取算法获得256维的特征,但该特征在各类分类器中表现不佳;然后对上述256维的特征通过设置阈值的方式得到256维的二值特征,使用上述三种分类器算法对该二值特征识别分类时识别率提升明显,但是设置阈值大小对识别准确率影响很大;最后采用自适应阈值方式形成二值化特征。基于自适应阈值方式改进的颜色直方图特征提取算法在随机森林分类算法和SVM分类器算法中均具有很高的识别准确率,同时通过实验对比表明改进的颜色直方图特征提取算法不仅对所有液面状态数据识别有着很高的准确率,而且在较少训练数据情况下依旧保持着较高的识别准确率。
朱鹏昌等采用图像分割技术对液舱内自由液面识别问题开展了一系列的研究。评估指标检验自由液面分割情况的结果表明:基于高斯差分滤波的分水岭算法可高效精确地识别平整、光滑的自由液面,精确度达到99%以上;而对于表面模糊、局部微破碎的液面识别却存在一定的偏差问题。基于Sobel算子滤波的分水岭算法能够实现对局部微破碎、表面模糊、附有气泡等类型液面的识别,精确度达到98%以上,但对于复杂破碎的液面识别却具有一定的局限性。
针对破碎液面识别的特殊性,朱鹏昌等开发了基于U-net网络的破碎波识别模型。该分割技术在破碎液面识别中具有稳定性好和精度较高等特点,精确度可达到95%以上。基于U-net网络模型的智能识别技术不仅可弥补传统算法的不足,而且还保障了液面的识别精度。因而在流体力学试验中,基于U-net网络模型的智能识别技术具有广泛的应用前景。
朱鹏昌等应用基于经验模态分解(Empirical Mode Decomposition,EMD)的Hilbert变换方法对舱室内液体的固有频率等参数进行分析。通过EMD分解原始信号去除噪声等干扰信号,经Hilbert变换求解固有频率和阻尼比。对比分析可知:实验值对应的一阶固有频率比理论值偏小,约为0.8-0.9f1。由于EMD方法的降噪作用,实验值对应的一阶固有频率值比经FFT求解的一阶固有频率值偏小。IMF分量对应的阻尼比随着IMF相关性的降低而增大。
综上所述,基于机器视觉技术的分液过程识别算法主要依靠检测液面来判断分液过程,存在如下不足:
(1)液面检测算法大多需要复杂的滤波处理与图像形态学操作,导致算法本身无法做到对液面的实时检测;
(2)分液过程最明显的变化发生在十分复杂的液-液相界面,多数情况下算法识别准确率不高,在液面变化不明显的情况下无法准确识别液-液相界面的位置;
(3)液面检测算法多关注于液面在玻璃瓶内的位置,无法对分液终点进行判断。
发明内容
鉴于以上所述现有技术的缺点,本发明的目的在于提供一种分液过程监测方法及系统、存储介质及终端,基于边缘检测算法和图像熵算法实现实验室无人值守的分液操作过程监测,准确高效,识别度高。
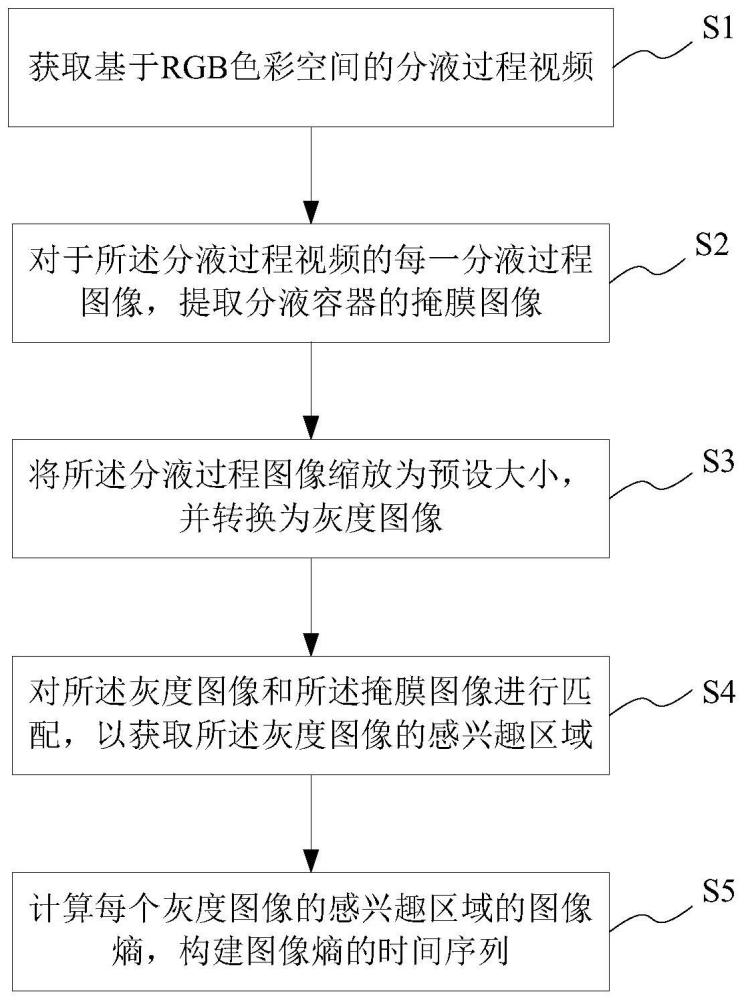
为实现上述目的及其他相关目的,本发明提供一种分液过程监测方法,包括以下步骤:获取基于RGB色彩空间的分液过程视频;对于所述分液过程视频的每一分液过程图像,提取分液容器的掩膜图像;将所述分液过程图像缩放为预设大小,并转换为灰度图像;对所述灰度图像和所述掩膜图像进行匹配,以获取所述灰度图像的感兴趣区域;计算每个灰度图像的感兴趣区域的图像熵,构建图像熵的时间序列。
于本发明一实施例中,对于所述分液过程视频的每一分液过程图像,提取分液容器的掩膜图像包括以下步骤:
将所述分液过程图像转化为灰度图像;
基于高斯滤波对所述灰度图像进行滤波处理;
基于Sobel滤波器提取滤波后的灰度图像的图像梯度;
对提取图像梯度后的灰度图像进行闭操作;
对闭操作后的灰度图像进行测地膨胀,获取主体二值化图像;
对所述主体二值化图像进行孔洞填充,获取所述分液容器的掩膜图像。
于本发明一实施例中,根据
于本发明一实施例中,基于高斯滤波对所述灰度图像进行滤波处理时,采用3x3高斯核;所述3×3高斯核为
于本发明一实施例中,基于Sobel滤波器提取滤波后的灰度图像的图像梯度时,采用3×3的Sobel滤波器;所述3×3的Sobel滤波器的Sobel算子为
于本发明一实施例中,将所述分液过程视频的每一分液过程图像缩放为预设大小包括以下步骤:
将所述分液过程图像的宽度缩放为预设像素;
对宽度缩放后的分液过程图像进行长度缩放,使得长度缩放后的分液过程图像与所述分液过程图像的图像比例一致。
本发明提供一种分液过程监测系统,包括视频获取模块、掩膜提取模块、图像转换模块、匹配模块和监测模块;
所述视频获取模块用于获取基于RGB色彩空间的分液过程视频;
所述掩膜提取模块用于对于所述分液过程视频的每一分液过程图像,提取分液容器的掩膜图像;
所述图像转换模块用于将所述分液过程图像缩放为预设大小,并转换为灰度图像;
所述匹配模块用于对所述灰度图像和所述掩膜图像进行匹配,以获取所述灰度图像的感兴趣区域;
所述监测模块用于计算每个灰度图像的感兴趣区域的图像熵,构建图像熵的时间序列。
于本发明一实施例中,所述掩膜提取模块包括灰度转化模块、滤波模块、梯度提取模块、闭操作模块、测地膨胀模块和孔洞填充模块;
所述灰度转化模块用于将所述分液过程图像转化为灰度图像;
所述滤波模块用于基于高斯滤波对所述灰度图像进行滤波处理;
所述梯度提取模块用于基于Sobel滤波器提取滤波后的灰度图像的图像梯度;
所述闭操作模块用于对提取图像梯度后的灰度图像进行闭操作;
所述测地膨胀模块用于对闭操作后的灰度图像进行测地膨胀,获取主体二值化图像;
所述孔洞填充模块用于对所述主体二值化图像进行孔洞填充,获取所述分液容器的掩膜图像。
于本发明一实施例中,所述灰度转化模块根据
于本发明一实施例中,所述滤波模块基于高斯滤波对所述灰度图像进行滤波处理时,采用3×3高斯核;所述3×3高斯核为
于本发明一实施例中,所述梯度提取模块基于Sobel滤波器提取滤波后的灰度图像的图像梯度时,采用3×3的Sobel滤波器;所述3×3的Sobel滤波器的Sobel算子为
于本发明一实施例中,所述图像转换模块包括宽缩放模块、长缩放模块和灰度转换模块;
所述宽缩放模块用于将所述分液过程图像的宽度缩放为预设像素;
所述长缩放模块用于对宽度缩放后的分液过程图像进行长度缩放,使得长度缩放后的分液过程图像与所述分液过程图像的图像比例一致;
所述灰度转换模块用于将长度缩放后的分液过程图像转换为灰度图像。
本发明提供一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述的分液过程监测方法。
本发明提供一种分液过程监测终端,包括:处理器及存储器;
所述存储器用于存储计算机程序;
所述处理器用于执行所述存储器存储的计算机程序,以使所述分液过程监测终端执行上述的分液过程监测方法。
本发明提供一种分液过程监测系统,包括视频采集装置和上述的分液过程监测终端;
所述视频采集终端用于采集基于RGB色彩空间的分液过程视频并发送至所述分液过程监测终端。
如上所述,本发明的分液过程监测方法及系统、存储介质及终端,具有以下有益效果:
(1)基于边缘检测算法和图像熵算法实现实验室无人值守的分液操作过程监测,在忽略颜色变化细节的前提下识别度高,计算速度快;
(2)计算复杂度较低,满足实时性的要求;
(3)克服了RGB色彩空间多个颜色通道干扰、人为干扰、光照变化等影响,准确度高,适用性强。
附图说明
图1显示为本发明的分液过程监测方法于一实施例中的流程图;
图2显示为本发明的分液过程监测与终点识别方法于一实施例中分液过程相界面变化示意图;
图3显示为图2的分液过程的图像熵的曲线变化示意图;
图4显示为本发明的分液过程监测系统于一实施例中的结构示意图;
图5显示为本发明的分液过程监测终端于一实施例中的结构示意图;
图6显示为本发明的分液过程监测系统于另一实施例中的结构示意图。
元件标号说明
41 视频获取模块
42 掩膜提取模块
43 图像转换模块
44 匹配模块
45 监测模块
51 处理器
52 存储器
61 视频采集装置
62 分液过程监测终端
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
液体分液过程本质上是从多相液体从混合态到分离的过程。根据图像信息熵的定义,全局信息熵与图像的细节丰富度呈现正相关,分液过程的细节丰富度会随着相界面的产生与溶液从浑浊到清晰整个过程逐渐增加,图像全局信息熵也随之增加。因此,本发明的分液过程监测方法及系统、存储介质及终端通过将边缘检测算法和图像熵算法相结合,实现实验室无人值守的分液操作过程监测,计算复杂度低,实时性能好,满足实际应用场景的需求,极具实用性。
如图1所示,于一实施例中,本发明的分液过程监测方法包括以下步骤:
步骤S1、获取基于RGB色彩空间的分液过程视频。
具体地,基于视频采集装置采集分液过程视频,并通过有线或无线的方式发送至本发明的分液过程监测终端。
于本发明一实施例中,所述视频采集装置采用摄像头直接拍摄分液过程视频,或者采用具有网络通信功能的智能终端间接提供网络传输而来的分液过程视频。其中,所述智能终端是指智能手机、平板电脑、PDA、PC,以及其他具有数据处理功能的终端设备。通常,智能终端是指具有独立的操作系统,可以由用户自行安装软件、游戏等第三方服务商提供的程序,通过此类程序来不断对手持设备的功能进行扩充,并可以通过移动通讯网络来实现无线网络接入的这样一类终端设备。
步骤S2、对于所述分液过程视频的每一分液过程图像,提取分液容器的掩膜图像。
具体地,对于所述分液过程视频中的每一帧分液过程图像,进行边缘检测以识别图像亮度区域发生较大变化的部分,该部分由梯度为极值的像素点构成;继而基于边缘检测后的分液过程图像进行分液溶液的掩膜提取。其中,图像掩膜就是用选定的图像、图形或物体,对处理的图像(全部或局部)进行遮挡,来控制图像处理的区域或处理过程。
于本发明一实施例中,对于所述分液过程视频的每一分液过程图像,提取分液容器的掩膜图像包括以下步骤:
21)将所述分液过程图像转化为灰度图像。
具体地,根据Gray=0.229R+0.587G+0.114B将所述分液过程图像转化为灰度图像,其中Gray表示灰度值,R、G、B表示所述分液过程图像的红、绿、蓝颜色通道值。为了加快计算速度,将上述公式整数化,根据
22)基于高斯滤波对所述灰度图像进行滤波处理。
具体地,对所述灰度图像采用高斯滤波进行模糊处理以抑制图像噪声。高斯核越大,输出图像越模糊。优选地,本发明采用大小为3×3的高斯核,从而能够在消除图像噪点的同时保留图像细节。
二维高斯核函数公式为
23)基于Sobel滤波器提取滤波后的灰度图像的图像梯度。
具体地,图像梯度是指图像某像素在x和y两个方向上的变化率(与相邻像素比较),是一个二维向量,由2个分量组成,X轴的变化、Y轴的变化。Sobel滤波器第一个核用于提取水平梯度,第二个核用以提取垂直梯度。故通过图像梯度可获取图像边缘。优选地,所述Sobel滤波器采用3x3Sobel滤波器。所述3×3的Sobel滤波器的Sobel算子为
24)对提取图像梯度后的灰度图像进行闭操作。
具体地,闭操作可使轮廓线更光滑,能够消弥狭窄的间断和长细的鸿沟,消除小的空洞,并填补轮廓线中的断裂。
25)对闭操作后的灰度图像进行测地膨胀,获取主体二值化图像。
26)对所述主体二值化图像进行孔洞填充,获取所述分液容器的掩膜图像。
步骤S3、将所述分液过程视频的每一分液过程图像缩放为预设大小,并转换为灰度图像。
具体地,为了降低计算复杂度,首先需将所述分液过程视频的每一分液过程图像缩放为预设大小,然后再将相同大小的分液过程图像转换为灰度图像。
于本发明一实施例中,将所述分液过程视频的每一分液过程图像缩放为预设大小包括以下步骤:
31)将所述分液过程图像的宽度缩放为预设像素。
具体地,首先对所述分液过程图像进行宽度缩放,使之均缩放为预设像素。所述预设像素需能够兼顾图像信息完整和计算复杂度低。优选地,所述预设像素为200像素。
32)对宽度缩放后的分液过程图像进行长度缩放,使得长度缩放后的分液过程图像与所述分液过程图像的图像比例一致。
具体地,在宽度缩放之后,再进行长度缩放,使得最终得到的缩放后的分液过程图像与初始的分液过程图像的图像比例一致,即对长度和宽度进行等比例缩放。
步骤S4、对所述灰度图像和所述掩膜图像进行匹配,以获取所述灰度图像的感兴趣区域(Region Of Interest,ROI)。
具体地,对于每个灰度图像,获取其对应的掩膜图像,并对所述灰度图像和所述掩膜图像进行匹配操作,匹配得到的区域即为所述灰度图像的感兴趣区域。其中,进行匹配操作时,直接将所述掩膜图像覆盖在所述灰度图像上,得到的重合部分即为所述灰度图像的感兴趣区域,其计算过程相当于两个矩阵的点乘。
步骤S5、计算每个灰度图像的感兴趣区域的图像熵,构建图像熵的时间序列。
具体地,对于每个灰度图像的感兴趣区域,计算图像熵。其中,熵是体系混乱程度的衡量,最早应用于热力学,后经香农引入信息论中。信息熵用来描述信源的不确定度,变量的不确定性越大,熵值也越大。图像熵是一种特征统计形式,反映了图像中平均信息量的多少。
在所述分液过程视频的每一帧分液过程图像的全局信息熵计算完成之后,基于时间先后顺序构建图像熵的时间序列。优选地,可以采用图像熵随时间变化的曲线图的形式。通过对所述图像熵的时间序列进行分析,获取图像熵最大值对应的时刻,并将该时刻判定为分液终点。
下面通过具体实施例来进一步阐述本发明的分液过程监测方法。
如图3所示,在该实施例中,所采用的四个分液过程视频数据集来源于本地实验室录制和网络传输。四个分液过程视频的背景、光照条件、玻璃仪器形状各异,便于验证本发明的分液过程监测方法的鲁棒性。
针对原始视频存在RGB色彩空间多个颜色通道干扰等影响,将RGB分液过程图像实时转化为灰度图像;针对画面中存在的人为干扰及光照变化等影响,在透明玻璃仪器掩膜图像基础上,通过像素坐标匹配等手段从原始分液过程图像中的灰度图像中提取兴趣区域并计算图像熵。图像熵随分液过程的变化曲线如图4所示。其中黑色圆点为图像熵最大值点,灰色圆点为实际分液终点。可知,图像熵的其变化趋势与实际分液过程液相分离程度变化趋势一致。
本发明的分液过程监测方法与科学家肉眼判断结果平均绝对误差为0.8s,判断结果更具备稳定性;与基于全画面一维全局灰度图像熵识别算法对比,本发明的分液过程监测方法的图像熵趋势变化更为明显,终点判别平均绝对误差降低19.5s(90.96%);与基于RGB色彩空间的图像熵算法相比,本发明的分液过程监测方法的分液终点判别相对误差降低89.87%(7.1s),计算耗时降低42.67%。
如图4所示,于一实施例中,本发明的分液过程监测系统包括视频获取模块41、掩膜提取模块42、图像转换模块43、匹配模块44和监测模块45。
所述视频获取模块41用于获取基于RGB色彩空间的分液过程视频。
具体地,基于视频采集装置采集分液过程视频,并通过有线或无线的方式发送至本发明的分液过程监测终端。
于本发明一实施例中,所述视频采集装置采用摄像头直接拍摄分液过程视频,或者采用具有网络通信功能的智能终端间接提供网络传输而来的分液过程视频。其中,所述智能终端是指智能手机、平板电脑、PDA、PC,以及其他具有数据处理功能的终端设备。通常,智能终端是指具有独立的操作系统,可以由用户自行安装软件、游戏等第三方服务商提供的程序,通过此类程序来不断对手持设备的功能进行扩充,并可以通过移动通讯网络来实现无线网络接入的这样一类终端设备。
所述掩膜提取模块42与所述视频获取模块41相连,用于对于所述分液过程视频的每一分液过程图像,提取分液容器的掩膜图像。
具体地,对于所述分液过程视频中的每一帧分液过程图像,进行边缘检测以识别图像亮度区域发生较大变化的部分,该部分由梯度为极值的像素点构成;继而基于边缘检测后的分液过程图像进行分液溶液的掩膜提取。其中,图像掩膜就是用选定的图像、图形或物体,对处理的图像(全部或局部)进行遮挡,来控制图像处理的区域或处理过程。
于本发明一实施例中,所述掩膜提取模块包括灰度转化模块、滤波模块、梯度提取模块、闭操作模块、测地膨胀模块和孔洞填充模块。
所述灰度转化模块用于将所述分液过程图像转化为灰度图像。
具体地,根据Gray=0.229R+0.587G+0.114B将所述分液过程图像转化为灰度图像,其中Gray表示灰度值,R、G、B表示所述分液过程图像的红、绿、蓝颜色通道值。为了加快计算速度,将上述公式整数化,根据
所述滤波模块与所述灰度转化模块相连,用于基于高斯滤波对所述灰度图像进行滤波处理。
具体地,对所述灰度图像采用高斯滤波进行模糊处理以抑制图像噪声。高斯核越大,输出图像越模糊。优选地,本发明采用大小为3×3的高斯核,从而能够在消除图像噪点的同时保留图像细节。
二维高斯核函数公式为
所述梯度提取模块与所述滤波模块相连,用于基于Sobel滤波器提取滤波后的灰度图像的图像梯度。
具体地,图像梯度是指图像某像素在x和y两个方向上的变化率(与相邻像素比较),是一个二维向量,由2个分量组成,X轴的变化、Y轴的变化。Sobel滤波器第一个核用于提取水平梯度,第二个核用以提取垂直梯度。故通过图像梯度可获取图像边缘。优选地,所述Sobel滤波器采用3×3Sobel滤波器。所述3×3的Sobel滤波器的Sobel算子为
所述闭操作模块与所述梯度提取模块相连,用于对提取图像梯度后的灰度图像进行闭操作。
具体地,闭操作可使轮廓线更光滑,能够消弥狭窄的间断和长细的鸿沟,消除小的空洞,并填补轮廓线中的断裂。
所述测地膨胀模块与所述闭操作模块相连,用于对闭操作后的灰度图像进行测地膨胀,获取主体二值化图像。
所述孔洞填充模块与所述测地膨胀模块相连,用于对所述主体二值化图像进行孔洞填充,获取所述分液容器的掩膜图像。
所述图像转换模块43与所述视频获取模块41相连,用于将所述分液过程图像缩放为预设大小,并转换为灰度图像。
具体地,为了降低计算复杂度,首先需将所述分液过程视频的每一分液过程图像缩放为预设大小,然后再将相同大小的分液过程图像转换为灰度图像。
于本发明一实施例中,所述图像转换模块包括宽缩放模块、长缩放模块和灰度转换模块。
所述宽缩放模块用于将所述分液过程图像的宽度缩放为预设像素。
具体地,首先对所述分液过程图像进行宽度缩放,使之均缩放为预设像素。所述预设像素需能够兼顾图像信息完整和计算复杂度低。优选地,所述预设像素为200像素。
所述长缩放模块与所述宽缩放模块相连,用于对宽度缩放后的分液过程图像进行长度缩放,使得长度缩放后的分液过程图像与所述分液过程图像的图像比例一致。
具体地,在宽度缩放之后,再进行长度缩放,使得最终得到的缩放后的分液过程图像与初始的分液过程图像的图像比例一致,即对长度和宽度进行等比例缩放。
所述灰度转换模块与所述长缩放模块相连,用于将长度缩放后的分液过程图像转换为灰度图像。
所述匹配模块44与所述掩膜提取模块42和所述图像转换模块43相连,用于对所述灰度图像和所述掩膜图像进行匹配,以获取所述灰度图像的感兴趣区域。
具体地,对于每个灰度图像,获取其对应的掩膜图像,并对所述灰度图像和所述掩膜图像进行匹配操作,匹配得到的区域即为所述灰度图像的感兴趣区域。其中,进行匹配操作时,直接将所述掩膜图像覆盖在所述灰度图像上,得到的重合部分即为所述灰度图像的感兴趣区域,其计算过程相当于两个矩阵的点乘。
所述监测模块45与所述匹配模块44相连,用于计算每个灰度图像的感兴趣区域的图像熵,构建图像熵的时间序列。
具体地,对于每个灰度图像的感兴趣区域,计算图像熵。其中,熵是体系混乱程度的衡量,最早应用于热力学,后经香农引入信息论中。信息熵用来描述信源的不确定度,变量的不确定性越大,熵值也越大。图像熵是一种特征统计形式,反映了图像中平均信息量的多少。
在所述分液过程视频的每一帧分液过程图像的全局信息熵计算完成之后,基于时间先后顺序构建图像熵的时间序列。优选地,可以采用图像熵随时间变化的曲线图的形式。通过对所述图像熵的时间序列进行分析,获取图像熵最大值对应的时刻,并将该时刻判定为分液终点。
需要说明的是,应理解以上装置的各个模块的划分仅仅是一种逻辑功能的划分,实际实现时可以全部或部分集成到一个物理实体上,也可以物理上分开。且这些模块可以全部以软件通过处理元件调用的形式实现;也可以全部以硬件的形式实现;还可以部分模块通过处理元件调用软件的形式实现,部分模块通过硬件的形式实现。例如,x模块可以为单独设立的处理元件,也可以集成在上述装置的某一个芯片中实现,此外,也可以以程序代码的形式存储于上述装置的存储器中,由上述装置的某一个处理元件调用并执行以上x模块的功能。其它模块的实现与之类似。此外这些模块全部或部分可以集成在一起,也可以独立实现。这里所述的处理元件可以是一种集成电路,具有信号的处理能力。在实现过程中,上述方法的各步骤或以上各个模块可以通过处理器元件中的硬件的集成逻辑电路或者软件形式的指令完成。
例如,以上这些模块可以是被配置成实施以上方法的一个或多个集成电路,例如:一个或多个特定集成电路(Application Specific Integrated Circuit,简称ASIC),或,一个或多个微处理器(Digital Singnal Processor,简称DSP),或,一个或者多个现场可编程门阵列(Field Programmable Gate Array,简称FPGA)等。再如,当以上某个模块通过处理元件调度程序代码的形式实现时,该处理元件可以是通用处理器,例如中央处理器(Central Processing Unit,简称CPU)或其它可以调用程序代码的处理器。再如,这些模块可以集成在一起,以片上系统(system-on-a-chip,简称SOC)的形式实现。
本发明的存储介质上存储有计算机程序,该程序被处理器执行时实现上述的分液过程监测方法。所述存储介质包括:ROM、RAM、磁碟、U盘、存储卡或者光盘等各种可以存储程序代码的介质。
如图5所示,于一实施例中,本发明的分液过程监测终端包括:处理器51及存储器52。
所述存储器52用于存储计算机程序。
所述存储器52包括:ROM、RAM、磁碟、U盘、存储卡或者光盘等各种可以存储程序代码的介质。
所述处理器51与所述存储器52相连,用于执行所述存储器52存储的计算机程序,以使所述分液过程监测终端执行上述的分液过程监测方法。
优选地,所述处理器51可以是通用处理器,包括中央处理器(Central ProcessingUnit,简称CPU)、网络处理器(Network Processor,简称NP)等;还可以是数字信号处理器(Digital Signal Processor,简称DSP)、专用集成电路(Application SpecificIntegrated Circuit,简称ASIC)、现场可编程门阵列(Field Programmable Gate Array,简称FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。
如图6所示,于一实施例中,本发明的分液过程监测系统包括视频采集装置61和上述的分液过程监测终端62。
所述视频采集终端61与所述分液过程监测终端62相连,用于采集基于RGB色彩空间的分液过程视频并发送至所述分液过程监测终端62。
优选地,所述视频采集装置61可以为摄像头、具有网络通信功能的智能终端等,从而可直接或间接获取分液过程视频。
综上所述,本发明的分液过程监测方法及系统、存储介质及终端基于边缘检测算法和图像熵算法实现实验室无人值守的分液操作过程监测,在忽略颜色变化细节的前提下识别度高,计算速度快;计算复杂度较低,满足实时性的要求;克服了RGB色彩空间多个颜色通道干扰、人为干扰、光照变化等影响,准确度高,适用性强。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。