一种关节助力和能量回收装置
文献发布时间:2023-06-19 19:35:22
技术领域
本发明涉及一种关节助力和能量回收装置。
背景技术
近年来随着科技的快速进步,微电子产品得到了长足的发展,并广泛运用于各行各业,如人体无线蓝牙耳机,人体无线运动检测传感器,物联网等,其中人体无线穿戴设备引起了科学界和工业界的广泛关注。为解决人体无线穿戴设备在供电方面所面临的挑战,大量研究者和科技公司投入到人体能量捕捉领域,并提出了自功能传感器。
日常运动过程中,人体各个关节将有大量的机械能被耗散,如行走过程中人体膝关节在摆动过程中几何全部做负功,此外,在下坡和下楼过程中,人体膝关节需提供较大的阻抗力矩,用于支撑人体重量,同时降低人体重心。
发明内容
为了克服上述现有技术中存在的问题,本发明提出一种关节助力和能量回收装置,该装置可用于回收人体关节在行走过程中的生物机械能,也可用于为穿戴者在下坡或者下楼过程中提供阻抗力矩,从而降低穿戴者的行走负担。
本发明解决上述问题的技术方案是:一种关节助力和能量回收装置,其特殊之处在于:
包括人机固定装置、发电单元、控制系统、储能单元;
所述人机固定装置包括第一绑缚机构和第二绑缚机构;
所述发电单元包括发电机、传动装置,两个绑缚机构将关节运动传递至传动装置,传动装置将关节运动速度放大传递到发电机,所述发电单元用于回收人体关节在运动过程中的机械能,以及用于为关节在特定的运动过程中提供阻抗阻力,从而降低人体膝关节行走负担;储能单元用于存储发电机回收的电能,控制系统用于控制所述发电单元的发电功率、发电电流,或用于调节发电单元的阻抗力矩。
进一步地,上述传动装置将关节运动速度放大传递到发电机,同时将关节的双向运动转化为所述发电机的单向运动,降低所述发电单元在运动变向过程的速度波动。
进一步地,上述传动装置是两条并行的齿轮传动链配合单向传动轴承,将双向运动转化为单向运动。
进一步地,上述传动装置是减速箱结合两个相对配置的锥齿轮传动配合单向传动轴承,将双向运动转化为单向运动。
进一步地,上述传动装置包括传动轴、锥齿轮一、锥齿轮三和增速器,锥齿轮一、锥齿轮三分别通过单向轴承对称安装在传动轴上,两个单向轴承允许转动方向相反,增速器的输入轴上安装锥齿轮二,锥齿轮一和锥齿轮三分别与锥齿轮二啮合,第二绑缚机构带动传动轴转动,增速器的输出轴与发电机的转轴连接。
进一步地,上述传动轴的端部设有拨动柄,拨动柄通过拨动柄锁紧螺钉与传动轴连接,第二绑缚机构通过拨动柄和拨动柄锁紧螺钉带动传动轴转动。
进一步地,上述关节助力和能量回收装置还包括惯性单元,惯性单元用于增加所述发电单元的惯性,从而降低所述发电单元在能量回收过程中的速度波动性,从而提高所述发电单元的发电效率。
进一步地,上述惯性单元为与发电机连接的减速齿轮配合飞轮,提高发电单元的转动惯性,从而降低所述发电单元中发电机的速度波动性,稳定发电机的输出电压。
进一步地,上述惯性单元包括小圆柱齿轮、大圆柱齿轮、飞轮轴,小圆柱齿轮安装在发电机转轴的尾部轴上,小圆柱齿轮与大圆柱齿轮啮合,大圆柱齿轮固定在飞轮轴上,飞轮轴通过轴承与飞轮轴支撑座相连。
进一步地,当所述的发电单元用于回收人体膝关节的运动过程中的机械能时,如平地行走过程中,所述控制系统将控制所述发电单元降低其对人体膝关节的影响;当所述的发电单元用于为人体膝关节提供阻抗力矩时,如下楼或者下坡过程中,所述控制系统将控制所述发电单元在特定的状态提供所需部分或全部的阻抗力矩,从而降低人体膝关节负担。
进一步地,上述所述发电单元还包括阻尼单元,阻尼单元用于提供阻抗力矩。
进一步地,上述阻尼单元与发电单元并联,所述阻尼单元为阻尼器。
进一步地,上述阻尼单元为磁流变阻尼器(直线型)、磁流变制动器(旋转型)中的一种。
进一步地,上述储能单元包括人体便携电子产品,人体便携电子产品包括无线IMU单元、人体运动检测设备等的一种或多种。
进一步地,上述储能单元包括人体照明设备、无线通讯设备、GPS定位设备等的一种或多种。
进一步地,上述储能单元为电池或者超级电容,用于存储发电单元回收的电能。
进一步地,上述发电机为直流电机,所述直流电机为直流有刷电机或直流无刷电机。
进一步地,上述传动轴通过轴承二与传动轴安装座相连,传动轴安装座固定在底板上,底板与第一绑缚机构固连。
进一步地,上述增速器通过增速器安装座固定在底板上。
进一步地,上述发电机通过发电机稳定座固定与底板上。
本发明的优点:
1、本发明公开了一款人体关节助力和能量回收装置,例如,该装置可用于回收人体膝关节在行走过程中的生物机械能,也可用于为穿戴者在下坡或者下楼过程中提供阻抗力矩,从而降低穿戴者的行走负担,发明提出的关节助力和能量回收装置也可用于人体踝关节或髋关节等回收机械能或提供阻抗力矩。
2、本发明采用两对相对布置的圆锥齿轮传动配合单向轴承将膝关节的双向弯曲运动转化为单向运动,提高了该装置的能量回收效率,降低了人体膝关节在变向过程中,装置惯性力对装置能量回收效率的影响。
3、本发明在装置中加入了飞轮机构,用于增加传动链的转动惯量,从而降低速度波动性,使该能量回收装置保持在较高的输出速度,从而获得较高的输出电压。
4、本发明提出在发电单元并联一个阻尼器,提高了该膝关节助力和能量回收装置的阻抗力矩输出。
附图说明
图1是本发明实施例的主视图;
图2是本发明实施例的去掉外壳的主视图;
图3是本发明实施例的主要机械结构布局图;
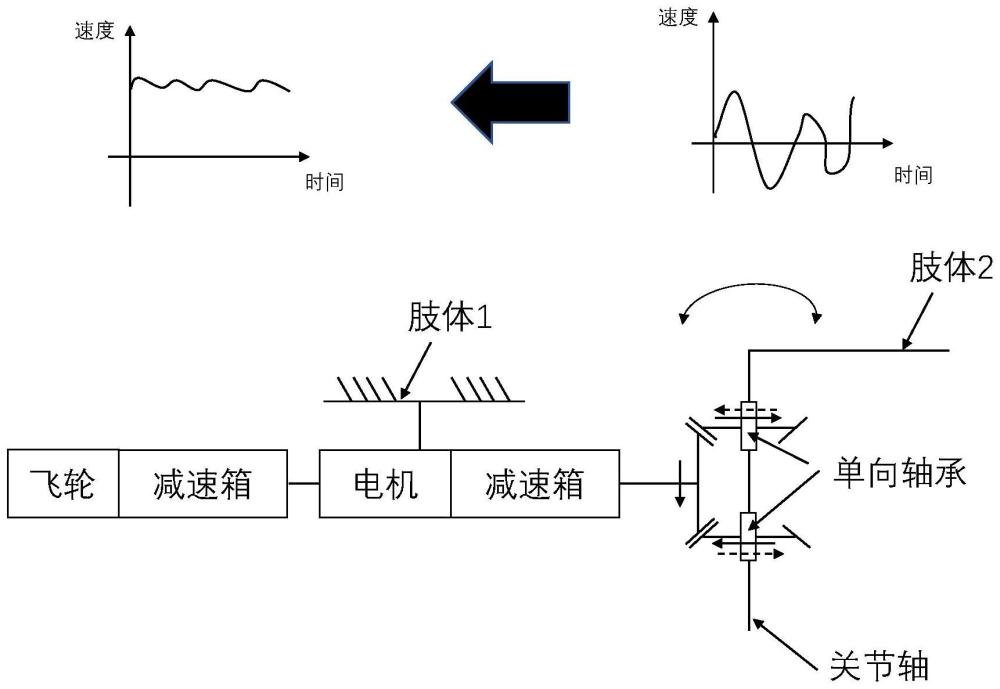
图4是本发明实施例的第一种原理图;
图5是本发明实施例的第二种原理图;
图6是本发明实施例的第三种原理图。
图中所示:小腿绑带一1,小腿绑带二2,拨动柄3,拨动柄锁紧螺钉4,外壳5,大腿绑带一6,大腿绑带二7,传动轴8,轴用挡圈一9,单向轴承一10,锥齿轮一11,锥齿轮二12,锥齿轮二锁紧螺钉13,增速器安装座14,增速器15,发电机16,发电机稳定座17,小圆柱齿轮18,大圆柱齿轮19,飞轮轴20,飞轮轴连接螺钉21,飞轮轴支撑座22,轴承一23,轴用挡圈二24,底板25,小圆柱齿轮紧定螺钉26,锥齿轮三27,传动轴安装座28,轴用挡圈三29,单向轴承二30,轴承二31,轴用挡圈四32。
具体实施方式
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。
参见图1-图6,本发明提供了一种关节助力和能量回收装置,包括人机固定装置、发电单元、控制系统、储能单元。
所述人机固定装置包括第一绑缚机构和第二绑缚机构,第一绑缚机构和第二绑缚机构分别固定在人体关节的两个部位上。所述发电单元包括发电机16、传动装置,所述发电单元用于回收人体关节在运动过程中的机械能,以及用于为关节在特定的运动过程(如下楼或者下坡过程)中提供阻抗阻力,从而降低人体膝关节行走负担;储能单元用于存储发电机16回收的电能,控制系统用于控制所述发电单元的发电功率、发电电流,同时,当所述的发电单元用于回收人体膝关节的运动过程中的机械能时,如平地行走过程中,所述控制系统将控制所述发电单元降低其对人体膝关节的影响;当所述的发电单元用于为人体膝关节提供阻抗力矩时,如下楼或者下坡过程中,所述控制系统将控制所述发电单元在特定的状态提供所需部分或全部的阻抗力矩,从而降低人体膝关节负担。
在本发明提供的一些实施例中,参见图3,所述关节助力和能量回收装置还包括惯性单元,惯性单元包括小圆柱齿轮18、大圆柱齿轮19、飞轮轴20,小圆柱齿轮18安装在发电机16转轴的尾部轴上,小圆柱齿轮18与大圆柱齿轮19啮合,大圆柱齿轮19固定在飞轮轴20上,飞轮轴20通过轴承与飞轮轴支撑座22相连。
在本发明提供的一些实施例中,参见图3,所述传动装置包括传动轴8、锥齿轮一11、锥齿轮三27和增速器15,锥齿轮一11、锥齿轮三27分别通过单向轴承对称安装在传动轴8上,两个单向轴承允许转动方向相反,增速器15的输入轴上安装锥齿轮二12,锥齿轮一11和锥齿轮三27分别与锥齿轮二12啮合,第二绑缚机构带动传动轴8转动,增速器15的输出轴与发电机16的转轴连接。
在本发明提供的一些实施例中,参见图3,所述传动轴8的端部设有拨动柄3,拨动柄3通过拨动柄锁紧螺钉4与传动轴8连接,第二绑缚机构通过拨动柄3和拨动柄锁紧螺钉4带动传动轴8转动。
在本发明提供的一些实施例中,参见图3,所述传动轴8通过轴承二与传动轴安装座28相连,传动轴安装座28固定在底板25上,底板25与第一绑缚机构固连。
在本发明提供的一些实施例中,参见图3,所述增速器15通过增速器安装座14固定在底板25上。所述发电机16通过发电机稳定座17固定与底板25上。阻尼单元为一般的阻尼器、磁流变阻尼器、磁流变制动器中的一种。储能单元包括人体便携电子产品,如无线IMU单元、人体运动检测设备等的一种或多种。储能单元还可以包括人体照明设备、无线通讯设备、GPS定位设备等的一种或多种。储能单元为电池或者超级电容,用于存储发电单元回收的电能。
实施例
一种关节助力和能量回收装置,包括人机固定装置、发电单元、控制系统、储能单元。下面以该装置应用于人体膝关节时为例进行说明。
参见图1-图4,人机固定装置包括小腿绑带一1、小腿绑带二2、大腿绑带一6、大腿绑带二7。通过大腿绑带一6和大腿绑带二7与人体大腿紧密相连,通过小腿绑带一1和小腿绑带二2与人体小腿紧密相连,小腿绑带一1和小腿绑带二2通过拨动柄3和拨动柄锁紧螺钉4向轴心处输入旋转动力。发电单元包括发电机、传动装置,发电单元设置在外壳5内。
参见图3,传动装置的拨动柄3通过拨动柄锁紧螺钉4与传动轴8连接,人体小腿运动时通过拨动柄3和拨动柄锁紧螺钉4带动传动轴8转动,单向轴承一10通过轴用挡圈一9在轴向限位于传动轴8上,锥齿轮一11与单向轴承一10外圈过盈配合,锥齿轮一11可以通过锥齿轮二12和锥齿轮二锁紧螺钉13带动增速器15转动,增速器15通过增速器安装座14固定在底板25上,传动轴8通过轴承二31与传动轴安装座28相连,传动轴安装座28固定在底板25上,轴承二31通过轴用挡圈四32在轴向限位于传动轴8上,单向轴承二30通过轴用挡圈三29在轴向限位于传动轴8上,锥齿轮三27与单向轴承二30外圈过盈配合,锥齿轮三27可以通过锥齿轮二12和锥齿轮二锁紧螺钉13带动增速器15转动,其中单向轴承一10和单向轴承二30允许转动方向相反,传动轴8在转动过程中始终只有一个单向轴承通过锥齿轮带动增速器15转动,增速器15与发电机16相连,发电机16尾部通过发电机稳定座17固定与底板25上,发电机16尾部轴连接惯性单元。发电机16尾部轴与惯性单元的小圆柱齿轮18相连,小圆柱齿轮18通过小圆柱齿轮紧定螺钉26固定在尾部轴上,小圆柱齿轮18与大圆柱齿轮19啮合,大圆柱齿轮19通过飞轮轴连接螺钉21固定在飞轮轴20上,飞轮轴20通过轴承一23和轴用挡圈二24与飞轮轴支撑座22相连,飞轮轴支撑座22固定在底板25上,电机增速器15带动发电机16转动时,小圆柱齿轮18会带动大圆柱齿轮19和飞轮轴20转动,从而将转动惯量储存在由大圆柱齿轮19、飞轮轴20和飞轮轴连接螺钉21组成的飞轮单元。
参见图3,单向轴承一10和单向轴承二30允许转动方向相反,当拨动柄3通过拨动柄锁紧螺钉4拨动传动轴8转动时,如果单向轴承一10带动锥齿轮一11转动,则单向轴承二30悬空,不会带动锥齿轮三27转动,同理,如果单向轴承二30带动锥齿轮三27转动,则单向轴承一10悬空,不会带动锥齿轮一11转动,无论传动轴8朝哪个方向转动,增速器15始终通过锥齿轮二12向一个方向转动动。
人行走过程中,人体膝关节在伸展和弯曲过程中完成双向运动,为降低膝关节在变向过程中产生的惯性力对能量回收效率的影响,本发明采用两对相对布置的圆锥齿轮传动配合两个单向轴承将膝关节的双向运动转化为电机的单向转动。此外为使电机的感应电压一直保持在较高输出,获得较高的能量回收效率,本发明提出将一减速器结合飞轮与电机另一端输出轴连接,从而提高整个电机传动链的转动惯性,降低电机在能量回收过程中的速度波动性,如图4所示。
该膝关节助力和能力回收装置,除了前面所述的用于回收膝关节的生物机械能外,还可以用于为膝关节提供阻抗力矩。例如,在下坡或者下楼过程中,为降低人体膝关节行走负担,该膝关节助力和能力回收装置可在适当的状态下提供阻抗力矩,用于支撑人体重量,降低人体重心。
当该膝关节助力和能力回收装置用于为膝关节提供阻抗力矩时,为提高输出的阻抗力矩,在电机能量回收单元并联一个阻尼器,该阻尼器可为一般的阻尼器,也可为磁流变阻尼器或者磁流变制动器,如图5和图6所示。控制系统控制所述发电单元的发电功率、发电电流,或用于调节阻尼器的阻抗力矩。
图6为本发明提供的一种基本的关节助力和能力回收装置,其没有配置惯性单元。图5为配置惯性单元中的关节助力和能力回收装置,增加惯性单元后,惯性单元用于增加所述发电单元的惯性,从而降低所述发电单元在能量回收过程中的速度波动性,从而提高所述发电单元的发电效率。所述的惯性单元为与电机连接的减速齿轮配合飞轮,提高发电单元的转动惯性,从而降低所述发电单元中所述电机的速度波动性,稳定电机的输出电压。
此外,应注意到本发明设计的人体膝关节助力和能量回收装置可用于人体踝关节和膝关节用于回收人体生物机械能,从而发电,或者用于提供阻抗力矩降低对应关节的行走负担。当该助力和能量回收装置用于为人体踝关节提供阻抗力矩时,可用于防止中风病人的足下垂。
以上所述仅为本发明的实施例,并非以此限制本发明的保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的系统领域,均同理包括在本发明的保护范围内。