一种虾类加工送料设备及方法
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及虾类生产技术领域,尤其涉及一种虾类加工送料设备及方法。
背景技术
现有技术中,由于虾类的结构较复杂,在生产中不容易进行定向上下料,导致大部分生产工序都采用人工的方式进行上下料,影响生产的效率和质量,虾体在生产过程中无法固定虾体的位置及体位,导致在每个虾体加工时都需要人工进行上料,人工投入巨大,生产成本较高;另外,由于虾体的虾尾一般呈卷缩状态,导致虾背、虾腹部分卷缩无法进行加工处理。
发明内容
本发明的目的是提供实现虾类自动化生产,提高生产效率,降低生产成本,并可在虾类生产过程中将虾尾拉直,以便后续对虾背、虾腹进行处理的一种虾类生产输送线及方法。
为了实现上述目的,本发明提供一种虾类加工送料设备,包括:
定向输送装置,其能够调整虾体的输送姿势并使虾保持头在前或尾在前进行输送;
虾体识别系统,其设于所述定向输送装置上用于识别当前输送虾体的体型特征;
夹虾装置,其设于所述定向输送装置上方用于夹取定向输送装置上输送的虾体,所述夹虾装置包括对称布置的两组夹片以及与两组所述夹片连接以用于驱动两组所述夹片相对运动的夹片驱动单元;
直虾挡块,其设有与所述夹虾装置移动虾体的方向相对的直虾端面;以及
虾体限位块,其开设有用于虾体嵌入的虾体限位槽;
其中,所述体型特征包括虾头朝向、虾体延伸方向和虾体的体节位置。
可选的,所述定向输送装置包括:
至少两组平行布置的第一输送带机构,相邻两组第一输送带机构之间限定有用于虾身通过并卡住虾头的第一间隙;以及
下料机构,其设置于所述第一输送带机构的出料端;
所述夹虾装置设于所述下料机构上方用于夹取下料机构上输送的虾体。
可选的,所述定向输送装置还包括至少一组第二输送带机构,所述第二输送带机构一端设于所述第一间隙内,另一端沿出料方向伸出所述第一间隙。
可选的,所述第二输送带机构包括第二传送带,所述第二传送带设置于所述第一间隙用于带动虾体尾部移动。
可选的,所述定向输送装置还包括虾尾挡板,所述虾尾挡板设于所述第一间隙内且靠近所述传送机构的出料端,其中,所述虾尾挡板能够阻挡落入所述第一间隙内的虾身尾部,以使虾体保持头在前、尾在后的姿势出料。
可选的,所述虾尾挡板包括阻挡部和导向部,所述阻挡部设有与第一输送带机构的送料方向相对的阻挡面,所述阻挡面能够阻挡虾尾向第一输送带机构的送料方向移动,所述导向部一端与阻挡部远离所述阻挡面的一端连接、另一端沿出料方向延伸并向下倾斜形成下料导向斜面。
可选的,所述定向输送装置还包括虾头挡板,所述虾头挡板设于所述第一输送带机构的出料端,其中,所述虾头挡板能够阻挡在所述第一输送带机构上传送的虾体头部,以使虾体保持头在后、尾在前的姿势出料。
可选的,所述虾头挡板设有从上至下且向出料方向倾斜延伸的虾头导向斜面,所述虾头导向斜面设置于所述第一输送带机构的出料端的斜上方并面向所述第一输送带机构。
可选的,所述第一输送带机构包括第一传送带、第一主动轮和第一被动轮,所述第一传送带绕设于所述第一主动轮和第一被动轮以用于所述第一传送带、第一主动轮和第一被动轮同步转动,相邻两组第一输送带机构的第一传送带之间形成所述第一间隙。
可选的,所述第一主动轮和外周面和所述第一被动轮的外周面均开设有定位凹槽,所述第一传送带嵌设于所述定位凹槽内。
可选的,所述定位凹槽的内壁呈弧形结构,所述第一传送带的横截面为圆形,所述第一传送带的外周面与所述定位凹槽的内壁贴合。
可选的,所述第一主动轮的轴心和所述第一被动轮的轴心之间的距离L不小于100mm。
可选的,至少两组的所述第一输送带机构通过传动轴组件串联,所述第一输送带机构滑动连接于所述传动轴组件。
可选的,相邻两组所述第一输送带机构之间设有用于限定所述第一间隙的宽度的间隔环。
可选的,所述第一间隙的宽度H为5mm-15mm。
可选的,所述直虾挡块面向所述夹虾装置的一侧面开设有直虾槽,所述直虾槽贯穿所述直虾端面及与所述直虾端面相背的另一端面。
可选的,所述虾体限位槽设有两个相对设置的限位壁,两个所述限位壁之间的距离为7mm-17mm。
可选的,所述限位壁的上端连接有导向壁,所述导向壁从下至上并背向所述虾体限位槽的一侧倾斜。
基于上述发明目的,本发明还提供了一种虾类加工送料方法,包括步骤:
S1、将虾体放置到定向输送装置上调整虾体的输送姿势并使虾体保持头在前或尾在前进行输送;
S2、虾体识别系统识别定向输送装置上输送的虾体的体型特征及位置;
S3、夹虾装置根据虾体识别系统反馈的信息夹取虾体;
S4、夹虾装置移动虾体,移动过程中,虾体的尾部与直虾端面产生干涉,直虾端面使虾体尾部伸直后越过直虾端面;
S5、夹虾装置将夹取的虾体放置到虾体限位槽内以固定虾体摆放的姿势;
其中,所述体型特征包括虾头朝向、虾体延伸方向和虾体的体节信息。
可选的,所述定向输送装置包括:
至少两组平行布置的第一输送带机构,相邻两组第一输送带机构之间限定有用于虾身通过并卡住虾头的第一间隙;
下料机构,其设置于所述第一输送带机构的出料端;以及
至少一组第二输送带机构,所述第二输送带机构一端设于所述第一间隙内,另一端沿出料方向伸出所述第一间隙;
其中,所述夹虾装置设于所述下料机构上方用于夹取下料机构上输送的虾体;
步骤S1中,所述第一输送带机构的输送速度不同于所述第二输送带机构的输送速度。
可选的,所述第二输送带机构包括第二传送带,所述第二传送带设置于所述第一间隙;
步骤S1中,虾体落到所述第二输送带机构上,虾体的虾身落入所述第二间隙内,虾头卡在所述第二间隙上,虾体由所述第二输送带机构带动向前移动,当虾体移动到所述第二传送带上方时,虾体的尾端与所述第二传送带接触,所述第二传送带带动虾尾相对虾头向前或向后运动。
可选的,所述步骤S4中,所述夹虾装置夹取虾体体节的第1-3节。
实施本发明的实施例,具有以下技术效果:
本发明通过定向输送装置实现虾体的定向输送,并通过虾体识别系统识别输送虾体的体型特征及位置信息,从而通过夹虾装置夹取虾体移动到虾体限位块的虾体限位槽中进行位置的限定,且在夹虾装置移动虾体到虾体限位槽的过程中,虾体的尾部与直虾挡块的直虾端面干涉,从而使虾体尾部在越过直虾端面时拉直,使虾体整体拉伸展开,避免虾体尾部卷缩,以便于后续进行加工,然后通过虾体限位槽将拉伸展开的虾体传送到下一加工工序,实现虾体的自动化生产,无需人工抓取摆放上料,提高生产的效率。
附图说明
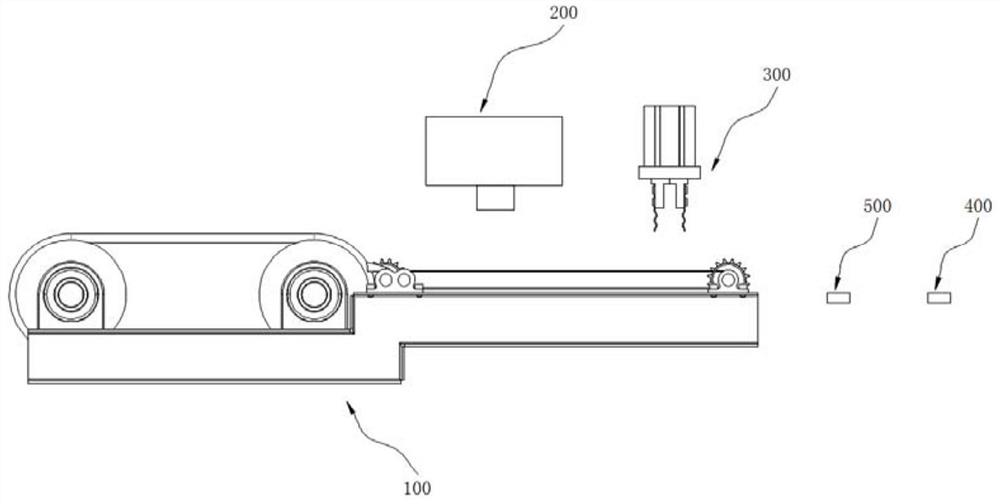
图1是本发明实施例1的结构示意图;
图2是图1所示实施例中定向输送装置的结构示意图;
图3是图1所示实施例中定向输送装置的左视图;
图4是图1所示实施例中定向输送装置的俯视图;
图5是图2中A处的放大示意图;
图6是图4中B处的放大示意图;
图7是图1所示实施例中定向输送装置的第一主动轮的结构示意图;
图8是图1所示实施例中夹虾装置的结构示意图;
图9是图1所示实施例中夹虾装置的主视图;
图10是图9中F处的放大示意图;
图11是图1所示实施例中直虾挡块的右视图;
图12是图1所示实施例中直虾挡块的结构示意图;
图13是图1所示实施例中虾体限位块的结构示意图;
图14是图1所示实施例中虾体限位块的右视图;
图15是本发明实施例2的结构示意图;
图16是图15所示实施例中定向输送装置的俯视图;
图17是图16中A-A处的剖视图;
图18是图15所示实施例中定向输送装置的左视图;
图19是图15中C处的放大示意图;
图20是图16所示实施例中定向输送装置的局部视图;
图21是本发明实施例3中定向输送装置的结构示意图;
图22是图21中定向输送装置的俯视图;
图23是图21中定向输送装置的左视图;
图24是图21中E处的放大示意图;
图25是图21中所示实施例中定向输送装置的局部视图。
附图标记说明:
100、定向输送装置,
110、第一输送带机构,111、第一传送带,112、第一主动轮,113、第一被动轮,114、定位凹槽,115、第一间隙,120、第二输送带机构,121、第二传送带,130、虾尾挡板,131、阻挡部,1311、阻挡面,132、导向部,1321、下料导向斜面,140、主动轴,141、被动轴,150、第一间隔环,160、虾头挡板,161、虾头导向斜面,170、导向板,180、喷头,190、下料机构;
200、虾体识别系统;
300、夹虾装置,
310、夹片,320、夹片驱动单元,330、凹槽,340、导向段,350、连接弧面;
400、虾体限位块,
410、虾体限位槽,420、限位壁,430、导向壁;
500、直虾挡块,510、直虾槽,520、直虾端面。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,本发明中采用术语“第一”、“第二”等来描述各种信息,但这些信息不应限于这些术语,这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本发明范围的情况下,“第一”信息也可以被称为“第二”信息,类似的,“第二”信息也可以被称为“第一”信息。
参考图1-图14,本发明的一个实施例提供了一种虾类加工送料设备,包括:
定向输送装置100,其能够调整虾体的输送姿势并使虾保持头在前或尾在前进行输送;
虾体识别系统200,其设于定向输送装置100上用于识别当前输送虾体的体型特征;
夹虾装置300,其设于定向输送装置100上方用于夹取定向输送装置100上输送的虾体,夹虾装置300包括对称布置的两组夹片310以及与两组夹片310连接以用于驱动两组夹片310相对运动的夹片驱动单元320;
直虾挡块500,其设有与夹虾装置300移动虾体的方向相对的直虾端面520;以及
虾体限位块400,其开设有用于虾体嵌入的虾体限位槽410;
其中,体型特征包括虾头朝向、虾体延伸方向和虾体的体节位置。
如此,本发明通过定向输送装置100实现虾体的定向输送,并通过虾体识别系统200识别输送虾体的体型特征及位置信息,从而通过夹虾装置300夹取虾体移动到虾体限位块400的虾体限位槽410中进行位置的限定,且在夹虾装置300移动虾体到虾体限位槽410的过程中,虾体的尾部与直虾挡块500的直虾端面520干涉,从而使虾体尾部在越过直虾端面520时拉直,使虾体整体拉伸展开,避免虾体尾部卷缩,以便于后续进行加工,然后通过虾体限位槽410将拉伸展开的虾体传送到下一加工工序,实现虾体的自动化生产,无需人工抓取摆放上料,提高生产的效率;另外,通过夹虾装置300的两组夹片310夹取虾体,有助于减少虾体避免的损伤,提高产品生产的质量。
进一步的,参考图2-图7,本实施例中的定向输送装置100包括:
至少两组平行布置的第一输送带机构110,相邻两组第一输送带机构110之间限定有用于虾身通过并卡住虾头的第一间隙115,从而实现虾体在落到第一输送带机构110上时,虾身落入第一间隙115内,同时虾头卡在第一间隙115上并进行传送;
下料机构190,其设置于第一输送带机构110的出料端,用于将从第一输送带机构110定向出料的虾体进行输送,并供夹虾装置300进行夹取;
夹虾装置300设于下料机构190上方用于夹取下料机构190上输送的虾体。
其中,本实施例的定向输送装置100还包括至少一组第二输送带机构120,第二输送带机构120一端设于第一间隙115内,另一端沿出料方向伸出第一间隙115。具体的,第二输送带机构120包括第二传送带121,第二传送带121设置于第一间隙115,通过第二传送带121与落入第一间隙115的虾体尾部接触,并使第二传送带121与第一输送带机构110产生速度差,当第二传送带121的速度大于第一输送带机构110的传送速度时,第二传送带121带动虾尾相对虾头向前移动,从而使虾体保持虾尾在前、虾头在后出料到下料机构190上移动,当第二传送带121的速度小于第一输送带机构110的传送速度时,第二传送带121带动虾尾相对虾头向后移动,从而使虾体保持虾头在前、虾尾在后出料到下料机构190上移动;
需要说明的是,当需要虾体保持虾尾在后、虾头在前进行出料时,第二传送带121的传送方向可与第一输送带机构110的传送方向相反,从而带动虾尾相对虾头向后移动,实现虾尾在后、虾头在前出料到下料机构190上。
优选的,本实施例中的第一输送带机构110包括第一传送带111、第一主动轮112和第一被动轮113,第一传送带111绕设于第一主动轮112和第一被动轮113以用于第一传送带111、第一主动轮112和第一被动轮113同步转动,相邻两组第一输送带机构110的第一传送带111之间形成第一间隙115,如此,通过第一主动轮112和第一被动轮113与驱动装置连接进行驱动并带动第一传送带111绕第一主动轮112和第一被动轮113循环转动,从而使裸贷第一间隙115上的虾体随着第一传送带111向前移动。
其中,第一主动轮112和外周面和第一被动轮113的外周面均开设有定位凹槽114,第一传送带111嵌设于定位凹槽114内,使第一传送带111稳定在第一主动轮112和第一被动轮113的限位位置转动,从而保证相邻的第一输送带机构110的第一传送带111之间的距离稳定,即第一间隙115的宽度保持稳定。
优选的,定位凹槽114的内壁呈弧形结构,第一传送带111的横截面为圆形,第一传送带111的外周面与定位凹槽114的内壁贴合,提高第一传送带111与第一主动轮112、第一被动轮113之间的摩擦力,使第一传送带111稳定可靠的循环转动。
本实施例的第一主动轮112的轴心和第一被动轮113的轴心之间的距离L不小于100mm,使落到第一输送带机构110上的虾体尾部尽可能的在传送过程中落入到第一间隙115中,从而提高虾体定位的可靠性。
本实施例至少两组的第一输送带机构110通过传动轴组件串联,第一输送带机构110滑动连接于传动轴组件。具体的,传动轴组件包括主动轴140和被动轴141,第一主动轮112滑动套设于主动轴140上,第一被动轮113滑动套设于被动轴141上,且主动轴140套设有若干数量的第一间隔环150,第一间隔环150设于相邻两组第一输送带机构110的第一主动轮112之间,且第一间隔环150的轴向两侧分别与相邻两组第一输送带机构110的第一主动轮112贴合,被动轴141套设有若干数量的第二间隔环,第二间隔环设于相邻两组第一输送带机构110的第一被动轮113之间,且第二间隔环的轴向两侧分别与相邻两组第一输送带机构110的第一被动轮113贴合,且第一间隔环150和第二间隔环的轴向尺寸相同,从而通过使用不同轴向尺寸的第一间隔环150和第二间隔环,使相邻两组第一输送带机构110的第一传送带111之间的间隔固定,保证第一间隙115的宽度在工作过程中的稳定;需要说明的是,第一间隔环150和第二间隔环可分别与第一主动轮112、第一被动轮113可拆卸装配或一体成型。
具体的,第一间隙115的宽度H为5mm-15mm,从而使用大多数尺寸的虾体的加工,需要说明的是,对于本领域技术人员来说,在获知本申请的技术方案的基础上,针对不同虾体的尺寸进行设置不同于本申请所公开的第一间隙115的尺寸,也应视为本发明的保护范围。
参考图8-图10,由于虾体在自然状态下,虾体的虾头以及虾体的第1-3节基本在一条直线上,且虾体的虾头以及虾体的背部基本呈现弧线形。因此,本发明在本实施例中的限位结构为夹片310内侧面凹陷形成的用于虾体嵌入的凹槽330,如此,在夹片310夹取虾体时,虾体的虾头以及虾体的第1-3节可嵌入凹槽330内,对虾体进行限位,具有可靠的夹取限位效果。
另外,当虾体的虾头和虾体的第1-3节夹取在凹槽330内时,且虾体的第4-6节露出两组夹片310外且呈弯曲状态,如此,方便实现后续工序中虾体第4-7节的拉直操作。
进一步优选的,凹槽330内壁的粗糙度的范围为0.9μm-2μm,如此,一方面,使夹片310在夹取虾体时,虾体与凹槽330内壁之间的摩擦力较小,可以使虾体在夹片310夹取过程中滑入凹槽330内,对虾体进行限位,另一方面,可以使虾体嵌入凹槽330后,两组夹片310在施加一定的夹持力后,虾体与凹槽330之间又产生具有足够的摩擦力,避免虾体滑出,进一步保证夹片310夹取虾体的稳定效果。
其中,为了使夹片310在夹持虾体时能有良好稳定的夹持效果,可选的,本发明的一个实施例凹槽330的槽深范围K为0.8mm-2mm,槽宽M的范围为2.5mm-5mm。由此,当虾体嵌入凹槽330内时,尽可能增大虾体与凹槽330内壁的接触面积,虾体与凹槽330内壁形成足够可靠的摩擦力,从而增加虾体容纳于凹槽330时的稳定性。
由于虾体截面的外轮廓呈现弧面型,因此,进一步优选的,本发明的一个实施例中的凹槽330为圆弧形凹槽330,以进一步增加虾体与凹槽330内壁的接触面积,提高夹片310夹取虾体的稳定性和可靠性。
其中,为了适应不同大小的虾体,本实施例中的圆弧形凹槽330的半径r
进一步的,为了在夹持虾体的时候,避免两组夹片310的夹持力过大压扁虾体,因此,本实施例中两组夹片310的凹槽330之间的最短距离N设为1.6mm-25mm,以与不同虾体的尺寸相适应,稳定夹持虾体;
另外,本实施例中的夹片驱动单元320为气缸驱动,设置气缸驱动的驱动力带动两组夹片310相对运动时的夹合力小于压坏虾体的力,因此,即使两组夹片310的凹槽330之间的最短距离N为1.6mm,依然可以稳定夹持虾体,避免压坏虾体。
进一步优选的,本实施例中为了防止夹片驱动单元320故障时无法准确控制夹持虾体的力,设置两组夹片310的凹槽330之间的最短距离N为7mm-20mm,降低两组夹片310在通过夹片驱动单元320驱动相对运动时用力过大损伤虾体的几率。
本发明的一个实施方式中,夹片驱动单元320为气动手指,气动手指包括两个相对运动的夹指,两组夹片310分别连接夹指以用于相对运动。
其中,气动手指可为Y型夹指或平型夹指。
进一步优选的,本实施例中的夹片310下端向外侧弯折形成导向段340,以使夹片310在夹取虾体的过程中,通过导向段340先与虾体接触,由于导向段340向夹片310的外侧弯折,因此,两组夹片310的导向段340之间形成喇叭口结构,从下至上逐渐收窄,从而方便夹取虾体时将虾体引导向凹槽330,提高夹取虾体的效率。
为了使导向段340在夹片310运动过程中能可靠的推动引导虾体向凹槽330移动,可选的,本发明的一个实施例中的导向段340内侧面与其所在夹片310沿两组夹片310相向运动的方向的所成夹角的范围b为45°-90°。
进一步的,导向段340的长度的范围为1.5mm-5mm,导向段340的内侧面与其所在夹片310沿两组夹片310相向运动的方向的所成夹角的范围b为45°-90°。
其中,导向段340与凹槽330之间通过连接弧面350连接,且连接弧面350与导向段340和凹槽330内壁相切,具体的,连接弧面350的圆心角度数范围a为25°-90°,半径范围r
由于虾体一般通过传送装置进行传送,因此,本实施例中的导向段340远离凹槽330的一端呈倒圆角结构,使夹片310在夹取虾体时,减少与虾体传送装置的刮蹭摩擦力,提高夹片310的使用寿命。
在另一实施例中,根据本发明提供的夹取机构,通过在夹片310的内侧面设置限位结构,实现虾体在夹片310夹取过程中的稳定性。而当限位结构为在夹片310内侧面形成的粗糙表面时,若粗糙表面的粗糙度太小,虾体与夹片310之间产生的摩擦力太小,夹片310在夹取过程中容易滑落,反之,当粗糙表面的粗糙度太大,在夹片310夹取过程中容易磨损虾体表面,影响虾体生产的质量。因此,当粗糙表面形成的粗糙度为5μm-10μm时,能够使夹片310在稳定夹取虾体的同时,避免对虾体表面造成损伤,保证虾体生产的质量。
进一步的,参考图11和图12,本实施例中的直虾挡块500面向夹虾装置300的一侧面开设有直虾槽510,直虾槽510贯穿直虾端面520及与直虾端面520相背的另一端面,使夹虾装置300夹取虾体与直虾端面520干涉实现拉直虾体尾部后,虾体尾部紧接着进入直虾槽510,从而限定虾体尾部向虾的左右两侧偏转,以此使虾体尾部在受到直虾端面520干涉后向虾体背部一侧转动,从而使虾体拉伸延伸开来。
优选的,参考图12和图13,,本实施例中的虾体限位槽410设有两个相对设置的限位壁420,两个限位壁420之间的距离为7mm-17mm,以适应大多数虾体的直径,使虾体容纳在两个限位壁420之间,避免移动,从而固定虾体的姿势,保持虾体虾背或虾腹向上进行输送。
其中,限位壁420的上端连接有导向壁430,导向壁430从下至上并背向虾体限位槽410的一侧倾斜,如此,在夹虾装置300夹取虾体移动到虾体限位槽410上方时,夹虾装置300松开使虾体跌落,使虾体在下落过程中,虾体的背部与导向壁430接触,此时虾体背部向上翻转落入虾体限位槽410内,从而使虾体在虾体限位槽410中保持背部向上的姿势。
本发明的一个实施例还提供了一种虾类加工送料方法,基于上述虾类加工送料设备,包括步骤:
S1、将虾体放置到定向输送装置100上调整虾体的输送姿势并使虾体保持头在前或尾在前进行输送;
S2、虾体识别系统200识别定向输送装置100上输送的虾体的体型特征及位置;
S3、夹虾装置300根据虾体识别系统200反馈的信息夹取虾体;
S4、夹虾装置300移动虾体,移动过程中,虾体的尾部与直虾端面520产生干涉,直虾端面520使虾体尾部伸直后越过直虾端面520;
S5、夹虾装置300将夹取的虾体放置到虾体限位槽410内以用于固定虾体摆放的姿势;
其中,体型特征包括虾头朝向、虾体延伸方向和虾体的体节信息。
如此,实现虾的自动化定向上料,提高各类虾生产的效率,降低人工成本。
其中,优选的,定向输送装置100包括:
至少两组平行布置的第一输送带机构110,相邻两组第一输送带机构110之间限定有用于虾身通过并卡住虾头的第一间隙115;
下料机构190,其设置于第一输送带机构110的出料端;以及
至少一组第二输送带机构120,第二输送带机构120一端设于第一间隙115内,另一端沿出料方向伸出第一间隙115;
其中,夹虾装置300设于下料机构190上方用于夹取下料机构190上输送的虾体;
步骤S1中,第一输送带机构110的输送速度不同于第二输送带机构120的输送速度。
进一步的,第二输送带机构120包括第二传送带121,第二传送带121设置于第一间隙115;
步骤S1中,虾体落到第二输送带机构120上,虾体的虾身落入第二间隙内,虾头卡在第二间隙上,虾体由第二输送带机构120带动向前移动,当虾体移动到第二传送带121上方时,虾体的尾端与第二传送带121接触,第二传送带121带动虾尾相对虾头向前或向后运动,从而使虾尾与虾头相对移动,实现虾头在前或虾尾在前进行出料。
具体的,由于虾体卷缩的位置一般是从虾体体节的第4-7节逐渐弯曲,因此,在步骤S4中,夹虾装置300夹住虾体体节的第1-3节。
实施例2:
参考图15-图20,本实施例与实施例1的区别在于,本实施例将第二输送带机构120替换为虾尾挡板130,因此,定向输送装置100还包括虾尾挡板130,虾尾挡板130设于第一间隙115内且靠近传送机构的出料端,其中,虾尾挡板130能够阻挡落入第一间隙115内的虾身尾部,以使虾体保持头在前、尾在后的姿势出料。
其中,虾尾挡板130包括阻挡部131和导向部132,阻挡部131设有与第一输送带机构110的送料方向相对的阻挡面1311,阻挡面1311能够阻挡虾尾向第一输送带机构110的送料方向移动,导向部132一端与阻挡部131远离阻挡面1311的一端连接、另一端沿出料方向延伸并向下倾斜形成下料导向斜面1321,当虾体从第一输送带机构的出料端跌落时,虾体跌落到下料导向斜面1321上,且下料导向斜面1321的下料端靠近下料机构190,从而将虾体滑落到下料机构190,以通过下料机构190持续向前输送。
进一步的,阻挡面1311沿远离导向部132方向延伸并向下倾斜,使虾体尾部与当面接触时,避免虾体尾部勾住虾尾挡板130,通过阻挡面1311阻挡后,由于虾体头部在第一传送带111的持续带动下,将虾体尾部沿着阻挡面1311拖动并到达下料导向斜面1321后进行下料。
实施例3:
参考图21-25,本实施例与实施例1的区别在于,本实施例将第二输送带机构120替换为虾头挡板160,因此,定向输送装置100还包括虾头挡板160,虾头挡板160设于第一输送带机构110的出料端,其中,虾头挡板160能够阻挡在第一输送带机构110上传送的虾体头部,以使虾体保持头在后、尾在前的姿势出料。
进一步的,虾头挡板160设有从上至下且向出料方向倾斜延伸的虾头导向斜面161,虾头导向斜面161设置于第一输送带机构110的出料端的斜上方并面向第一输送带机构110,从而使虾头挡板160的虾头导向斜面161阻挡虾头后,虾头可沿着虾头导向斜面161滑出第一输送带机构110,且在虾头与虾头导向斜面161接触的过程中,虾头导向斜面161逐渐将虾头压向后倾斜,然后沿着虾头导向斜面161滑出。
其中,本实施例的定向输送装置100还包括导向板170,导向板170设于虾头挡板160下方,导向板170设有由第一间隙115内向出料端延伸且从上至下倾斜的下料导向斜面1321,下料导向斜面1321面向虾头挡板160,当虾体从第一输送带机构110的出料端跌落时,虾体跌落到下料导向斜面1321上,虾体沿着下料导向斜面1321平缓滑落到下料机构190上;需要说明的是,下料导向斜面1321的一端靠近下料机构190,使跌落到下料导向斜面1321上的虾体沿着下料导向斜面1321滑落到下料机构190上进行输送。
本实施例进一步优选的,虾体头尾定向装置包括有用于喷水的喷头180,该喷头180设于第一间隙115中用于向靠近第一输送带机构110出料口的虾体喷水,使虾体保持表面湿润,从而减小虾体从下料导向斜面132131上滑下时与下料导向斜面1321之间产生的摩擦力。
综上,本发明通过定向输送装置100实现虾体的定向输送,并通过虾体识别系统200识别输送虾体的体型特征及位置信息,从而通过夹虾装置300夹取虾体移动到虾体限位块400的虾体限位槽410中进行位置的限定,且在夹虾装置300移动虾体到虾体限位槽410的过程中,虾体的尾部与直虾挡块500的直虾端面520干涉,从而使虾体尾部在越过直虾端面520时拉直,使虾体整体拉伸展开,避免虾体尾部卷缩,以便于后续进行加工,然后通过虾体限位槽410将拉伸展开的虾体传送到下一加工工序,实现虾体的自动化生产,无需人工抓取摆放上料,提高生产的效率;另外,通过夹虾装置300的两组夹片310夹取虾体,有助于减少虾体避免的损伤,提高产品生产的质量。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。