一种虾体扶正装置
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及食品加工设备技术领域,特别是涉及一种虾体扶正装置。
背景技术
虾的营养极为丰富,对人体具有非常高的营养价值。虾仁中含有20%的蛋白质,是蛋白质含量很高的食品之一,是鱼、蛋、奶的几倍甚至十几倍;虾仁含有甘氨酸,这种氨基酸的含量非常高;和鱼肉、禽肉相比,脂肪含量少,并且几乎不含作为能量来源的动物糖质;虾仁中的胆固醇含量较高,同时含有丰富的能降低人体血清胆固醇的牛磺酸;虾仁含有丰富的钾、碘、镁、磷等微量元素和维生素A等成分,其肉质松软,易消化,对身体虚弱以及病后需要调养的人是极好的食物,虾仁中丰富的镁,镁对心脏活动具有重要的调节作用,能很好的保护心血管系统,它可减少血液中胆固醇含量,防止动脉硬化,同时还能扩张冠状动脉,有利于预防高血压及心肌梗死。
即使现在的交通运输比较发达,但是活虾的运输成本仍然很高,因此很多虾加工企业选用鲜活的对虾作为原料,去掉虾头、虾壳和虾肠后就可以得到虾仁,进一步加工得到冻虾仁和冷冻虾产品。
目前国内加工行业的虾类加工设备主要有两种,一种利用对辊旋转磨檫的原理剥壳,将去头虾置于两对辊之间,无需精确定位,通过对辊往复多次旋转磨檫虾壳,使得虾壳松脱并被对辊旋转夹持带走,留下虾肉,缺点是原料需要浸泡预处理时间长、去壳不干净、成品率低等等;另一种是半自动剥壳机,由手工将去头虾逐一摆放在输送带托盘槽内,使得虾背或虾腹朝上,然后送入机内,利用传送装置使去头虾逐一依次经过定位夹持、开背、剥壳、去肠线等各功能工位,最后得到加工好的虾仁。由此可见,现有的加工设备并无法实现虾体的自动定向摆放,加工效率低,导致现有的剥虾机械设备应用范围小,无法进行大规模推广。
发明内容
本发明要解决的技术问题是:提供一种能自动将虾体扶正,进而使得虾背朝上的虾体扶正装置。
为了解决上述技术问题,本发明提供了一种虾体扶正装置,包括机架、输送结构、驱动结构、第一扶正轮和第二扶正轮,所述输送结构具有用于输送虾体的输送面;所述驱动结构设于所述机架上;所述第一扶正轮与所述驱动结构驱动连接,所述第一扶正轮的底端位于输送面的上方,所述第一扶正轮设有外径从下至上逐渐减少的第一扶正段;所述第二扶正轮与所述驱动结构驱动连接,所述第二扶正轮的底端与所述第一扶正轮的底端相平齐,所述第二扶正轮设有外径从下至上逐渐减少的第二扶正段,所述驱动结构能够驱动两个所述扶正轮相对转动,当所述输送面上的虾体进入所述第一扶正轮和所述第二扶正轮之间时,所述第一扶正轮的底端与虾腹的端部相抵接支撑,所述第二扶正段与虾背相抵接,以引导虾背向上移动;或所述第二扶正轮的底端与虾腹的端部相抵接支撑,所述第一扶正段与虾背相抵接,以引导虾背向上移动。
作为优选方案,所述第一扶正段和所述第二扶正段呈其外壁向内凹陷的圆锥体。
作为优选方案,所述第一扶正轮的底端设有与所述第一扶正段圆滑过渡连接的第一支撑段,所述第二扶正轮的底端设有与所述第二扶正段圆滑过渡连接的第二支撑段,所述第一支撑段和所述第二支撑段呈外径从上至下逐渐减少的圆弧倒角。
作为优选方案,所述第一支撑段的高度和所述第二支撑段的高度大于虾体的1/10厚度且小于虾体的1/3厚度。
作为优选方案,所述驱动结构包括扶正驱动件以及传动组件,所述扶正驱动件设有所述机架上,所述扶正驱动件的动力输出端与所述第二扶正轮相连接,所述传动组件连接于所述第一扶正轮和所述第二扶正轮之间。
作为优选方案,所述传动组件包括第一齿轮和第二齿轮,所述第一扶正轮的顶端设有第一转动轴,所述第一齿轮设于所述第一转动轴上,所述第二扶正轮的顶端设有第二转动轴,所述第二齿轮设于所述第二转动轴上,所述第二转动轴与所述扶正驱动件的动力输出端相连接,所述第一齿轮和所述第二齿轮相啮合。
作为优选方案,所述第二转动轴设有第一传动轮,所述扶正驱动件的动力输出端设有第二传动轮,所述第一传动轮与所述第二传动轮通过传动带连接。
作为优选方案,所述输送结构包括输送驱动件、第一输送轮、第二输送轮、输送带和第一支撑架,所述输送驱动件用于提供驱动力,且安装于所述机架上;所述第一输送轮与所述输送驱动件的输出端相连接,且安装于所述机架上;所述第二输送轮安装于所述机架上;所述输送带传动连接于所述第一输送轮与所述第二输送轮,所述输送带的表面限定成所述输送面;所述第一支撑架设有供所述输送带贯穿的第一通道,所述第一支撑架设于所述机架上,当所述输送带通过所述第一通道时,所述输送带两侧向上相对弯折,以使所述输送带形成输送槽,所述第二扶正轮的底端与所述第一扶正轮的底端位于所述输送槽的进口端。
作为优选方案,所述输送结构还包括第一导向板和第二导向板,所述第一导向板的一端与所述第一扶正轮相对设置;所述第二导向板的一端与所述第二扶正轮相对设置,所述第一导向板的另一端与所述第二导向板的另一端分别位于所述输送带的两侧。
作为优选方案,所述输送结构还包括第一输出板和第二输出板,所述第一输出板的一端与所述第一扶正轮相对设置;所述第二输出板的一端与所述第二扶正轮相对设置,所述第一输出板的另一端与所述第二输出板的另一端分别位于所述输送槽的进口端上。
作为优选方案,所述输送结构还包括第二支撑架,所述第二支撑架位于所述第一支撑架的后侧,所述第二支撑架设有供所述输送带贯穿的第二通道,所述第二支撑架设于所述机架上,当所述输送带通过所述第二通道时,所述输送带两侧向上相对弯折,以延长所述输送槽的长度。
本发明所提供的一种虾体扶正装置与现有技术相比,其有益效果在于:
本发明中利用所述输送结构对虾体进行输送,所述驱动结构能够驱动两个所述扶正轮相对转动,当所述输送面上的虾体进入所述第一扶正轮和所述第二扶正轮之间时,所述第一扶正轮的底端或所述第二扶正轮的底端与虾腹的端部(虾尾或者虾头肉)相抵接支撑,起到支撑作用,而虾背位置的壳体呈圆弧状,使得虾背的中间位置与所述第二扶正段或所述第一扶正段相抵接,在所述第一扶正轮和所述第二扶正轮之间的宽度逐渐缩小的情况下,虾背会被所述第二扶正段或所述第一扶正段逐渐引导向上移动,最后实现对平放经过的虾体起到扶正作用,使得虾体呈虾背朝上进入各功能工位进行加工操作,无需手工摆放,大大提高了加工效率。
附图说明
图1是本发明优选实施例的虾体扶正装置中扶正机构的结构示意图。
图2是本发明优选实施例的虾体扶正装置中扶正机构的原理分析图。
图3是本发明优选实施例的虾体扶正装置的整体结构示意图。
图4是本发明优选实施例的虾体扶正装置的侧视结构示意图。
图中:
100.机架;
200.输送结构;210.输送驱动件;220.第一输送轮;230.第二输送轮;240.输送带;241.输送面;242.输送槽;250.第一支撑架;251.第一通道;260.第二支撑架;261.第二通道;
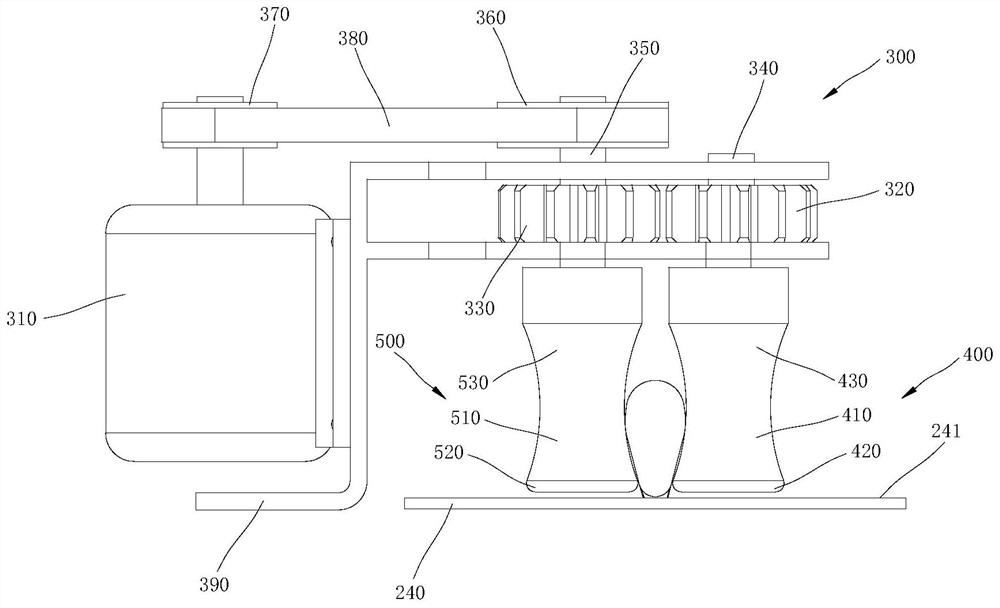
300.驱动结构;310.扶正驱动件;320.第一齿轮;330.第二齿轮;340.第一转动轴;350.第二转动轴;360.第一传动轮;370.第二传动轮;380.传动带;390.安装板;
400.第一扶正轮;410.第一扶正段;420.第一支撑段;430.第一连接段;
500.第二扶正轮;510.第二扶正段;520.第二支撑段;530.第二连接段;
600.第一导向板;
700.第二导向板;
800.第一输出板;
900.第二输出板。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
在本发明的描述中,需要说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,应当理解的是,本发明中采用术语“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是焊接连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
如图1至图4所示,本发明优选实施例提供了一种虾体扶正装置,包括机架100、输送结构200、驱动结构300、第一扶正轮400和第二扶正轮500,所述输送结构200具有用于输送虾体的输送面241,所述驱动结构300设于所述机架100上,所述第一扶正轮400与所述驱动结构300驱动连接,所述第一扶正轮400的底端位于输送面241的上方,所述第一扶正轮400设有外径从下至上逐渐减少的第一扶正段410,所述第二扶正轮500与所述驱动结构300驱动连接,所述第二扶正轮500的底端与所述第一扶正轮400的底端相平齐,所述第二扶正轮500设有外径从下至上逐渐减少的第二扶正段510,所述驱动结构300能够驱动两个所述扶正轮相对转动,当所述输送面241上的虾体进入所述第一扶正轮400和所述第二扶正轮500之间时,所述第一扶正轮400的底端与虾腹的端部相抵接支撑,所述第二扶正段510与虾背相抵接,以引导虾背向上移动;或所述第二扶正轮500的底端与虾腹的端部相抵接支撑,所述第一扶正段410与虾背相抵接,以引导虾背向上移动。
基于上述技术特征的虾体扶正装置,利用所述输送结构200对虾体进行输送,所述驱动结构300能够驱动两个所述扶正轮相对转动,当所述输送面241上的虾体进入所述第一扶正轮400和所述第二扶正轮500之间时,所述第一扶正轮400的底端或所述第二扶正轮500的底端与虾腹的端部(虾尾或者虾头肉)相抵接支撑,起到支撑作用,而虾背位置的壳体呈圆弧状,使得虾背的中间位置与所述第二扶正段510或所述第一扶正段410相抵接,在所述第一扶正轮400和所述第二扶正轮500之间的宽度逐渐缩小的情况下,虾背会被所述第二扶正段510或所述第一扶正段410逐渐引导向上移动,最后实现对平放经过的虾体起到扶正作用,使得虾体呈虾背朝上进入各功能工位进行加工操作,无需手工摆放,大大提高了加工效率。
在本实施例中,所述第一扶正段410和所述第二扶正段510都呈其外壁向内凹陷的圆锥体,也就是所述第一扶正段410和所述第二扶正段510的下半段比较平坦,便于虾背更好进入所述第一扶正段410或所述第二扶正段510,所述第一扶正段410和所述第二扶正段510的上半段比较陡峭,对虾背具有向上的作用力,便于快速将虾背引导向上移动,起到虾背朝上的扶正效果。
在本实施例中,所述第一扶正轮400的底端设有与所述第一扶正段410圆滑过渡连接的第一支撑段420,所述第二扶正轮500的底端设有与所述第二扶正段510圆滑过渡连接的第二支撑段520,所述第一支撑段420和所述第二支撑段520呈外径从上至下逐渐减少的圆弧倒角,对虾腹的端部具有向下的力,起到更好的支撑作用。其中,所述第一支撑段420和所述第二支撑段520与所述输送面241之间具有一定距离间隙,也就是两者不相互抵接,避免不同运动方向发生相互干扰,所述第一支撑段420的高度和所述第二支撑段520的高度大于虾体的1/10厚度且小于虾体的1/3厚度,确保所述第一扶正段410或所述第二扶正段510能够与虾背相抵接,此处的虾体的厚度指的是虾体的最大厚度值,一般是位于虾背中部的厚度值。
进一步的,所述第一扶正轮400的顶端设有与所述第一扶正段410圆滑过渡连接的第一连接段430,所述第二扶正轮500的顶端设有与所述第二扶正段510圆滑过渡连接的第二连接段530,所述第一连接段430和所述第二连接段530呈外径从下到上逐渐增大的圆锥体,使得所述第一扶正轮400和第二扶正轮500整体轮廓呈内弯腰鼓形,提高其转动过程的稳定性。此外,所述第一扶正轮400和第二扶正轮500对称旋转对虾体也具有一定的输送作用,其输送方向与所述输送带240的输送方向一致。
其中,如图2所示,A点是所述第二扶正轮500作用在虾腹端部的作用点,B点是所述第一扶正轮400作用在虾背的作用点,根据向量平行四边形的原理作图可得,F1是B点作用在虾背上的力,F2是A点作用在虾腹端部的力,F1和F2为位置不同、大小相等且方向相反的力,F3是所述第一扶正轮400对虾背的压力,F4是所述第二扶正轮500对虾腹端部的压力,F5是所述第一扶正轮400和虾背之间维持平衡的摩擦力,F6是所述第二扶正轮500和虾腹端部之间维持平衡的摩擦力,G为重力,箭头方向为力的方向,箭头的长短表示力的大小,进一步可得,AC为使得虾背向上翻转的动力臂,BD为使得虾腹向上翻转的动力臂,AE是阻碍虾背向上翻转的阻力臂,BH是阻碍虾腹向上翻转的阻力臂。经过受力分析可得,要维持虾体的动力平衡,所需的摩擦力F5远大于F6,因此B点更容易发生滑动,其滑动方向与F5相反,因为翻转效果与动力、动力臂成正比,与阻力、阻力臂成反比,阻碍虾背向上翻转和阻碍虾腹向上翻转都是重力G,阻力臂AE和BH的大小相差不大,使虾背和虾腹向上翻转的F3和F4的大小相差不大,而使虾背向上翻转的动力臂AC比使虾腹向上翻转的动力臂BD大很多倍,因此在虾体进入所述第一扶正轮400和所述第二扶正轮500之间时一定会使虾背朝上翻转,以达到扶正效果。
在本实施例中,所述驱动结构300包括扶正驱动件310以及传动组件,所述扶正驱动件310设于所述机架100上,所述扶正驱动件310的动力输出端与所述第二扶正轮500相连接,所述传动组件连接于所述第一扶正轮400和所述第二扶正轮500之间,通过所述扶正驱动件310驱动所述第二扶正轮500转动,利用所述传动组件带动所述第一扶正轮400相对转动,所述第一扶正轮400和所述第二扶正轮500能够使得虾体在向前输送过程中,扶正虾体到虾背朝上。
进一步的,所述传动组件包括第一齿轮320和第二齿轮330,所述第一扶正轮400的顶端设有第一转动轴340,所述第一转动轴340位于所述第一扶正轮400的中轴线上,所述第一齿轮320设于所述第一转动轴340上,所述第二扶正轮500的顶端设有第二转动轴350,所述第二转动轴350位于所述第二扶正轮500的中轴线上,所述第二齿轮330设于所述第二转动轴350上,所述第二转动轴350与所述扶正驱动件310的动力输出端相连接,所述第一齿轮320和所述第二齿轮330相啮合,当所述第二扶正轮500转动后,通过所述第一齿轮320和所述第二齿轮330的啮合传动,实现所述第一扶正轮400和所述第二扶正轮500的相对转动,且具有较好的同步性。所述第一齿轮320和所述第二齿轮330安装在安装板390上,所述扶正驱动件310也安装在所述安装板390上,所述安装板390再整体装配在机架100上。
再进一步的,所述第二转动轴350设有第一传动轮360,所述扶正驱动件310的动力输出端设有第二传动轮370,所述第一传动轮360与所述第二传动轮370通过传动带380连接,所述传动带380为皮带,通过所述传动带380带动所述第一扶正轮400转动,能够能缓和齿轮传动的冲击和振动,运动平稳无噪音,起安全保护作用,而且便于调整所述扶正驱动件310的位置。
在本实施例中,如图3至图4所示,所述输送结构200包括输送驱动件210、第一输送轮220、第二输送轮230、输送带240和第一支撑架250,所述输送驱动件210用于提供驱动力,且安装于所述机架100上,所述第一输送轮220与所述输送驱动件210的输出端相连接,且安装于所述机架100上,所述第二输送轮230安装于所述机架100上,所述输送带240传动连接于所述第一输送轮220与所述第二输送轮230,所述输送带240的表面限定成所述输送面241,所述第一支撑架250设有供所述输送带240贯穿的第一通道251,所述第一支撑架250通过支撑板设于所述机架100上,当所述输送带240通过所述第一通道251时,所述输送带240两侧向上相对弯折,以使所述输送带240形成输送槽242,所述第二扶正轮500的底端与所述第一扶正轮400的底端位于所述输送槽242的进口端,也就是所述第一支撑段420和所述第二支撑段520与所述输送面241相抵接且位于所述输送槽242的进口端。
其中,所述输送驱动件210能够驱动所述输送带240在所述第一输送轮220与所述第二输送轮230之间进行传动,以实现对虾体的输送。其中,利用所述第一支撑架250上的第一通道251将所述输送带240两侧向上相对弯折以形成输送槽242,所述第一扶正轮400和所述第二扶正轮500位于所述输送带240向上弯折的过渡区,且所述第一支撑段420和所述第二支撑段520紧贴所述输送带240的表面,使得扶正后的虾体进入所述输送槽242,能够保持在竖直状态进行输送,实现虾背朝上输送至各个功能工位。
所述输送结构200还包括第二支撑架260,所述第二支撑架260位于所述第一支撑架250的后侧,所述第二支撑架260设有供所述输送带240贯穿的第二通道261,所述第二支撑架260通过支撑板设于所述机架100上,当所述输送带240通过所述第二通道261时,所述输送带240两侧向上相对弯折,以延长所述输送槽242的长度。所述第一通道251和所述第二通道261的纵截面呈U形,使得所述第一通道251和所述第二通道261的侧壁对所述输送带240的限制作用,使得所述输送带240两侧向上相对弯折以形成具有一定长度的输送槽242,所述输送槽242对虾体形成夹持作用,实现虾体在输送槽242内保持在竖直状态进行输送,且会被挤捏并拉直,实现对虾体的夹持输送。
在本实施例中,还包括第一导向板600和第二导向板700,所述第一导向板600的一端与所述第一扶正轮400相对设置,第二导向板700的一端与所述第二扶正轮500相对设置,所述第一导向板600的另一端与所述第二导向板700的另一端分别位于所述输送带240的两侧,也就是所述第一导向板600和第二导向板700位于所述输送带240的上方,且所述第一导向板600和第二导向板700组合成的形状呈“八”字型,以引导虾体进入所述第一扶正轮400和所述第二扶正轮500之间。
在本实施例中,还包括第一输出板800和第二输出板900,所述第一输出板800的一端与所述第一扶正轮400相对设置,所述第二输出板900的一端与所述第二扶正轮500相对设置,所述第一输出板800的另一端与所述第二输出板900的另一端分别位于所述输送槽242的进口端上,所述第一输出板800和所述第二输出板900对扶正后的虾体限位,确保虾体保持在虾背朝上的状态进入所述输送槽242,所述第一输出板800和第二输出板900呈平行状态。其中,所述第一导向板600、所述第二导向板700、所述第一输出板800和所述第二输出板900可采用固定架的方式安装在机架100上。
本实施例所述的虾体扶正装置的工作原理为:将虾尾朝向所述输送带240的运动方向,并平放在所述输送带240的表面,在所述第一导向板600和所述第二导向板700的引导下,虾体进入所述第一扶正轮400和所述第二扶正轮500之间时,所述第一支撑段420或所述第二支撑段520与虾尾相抵接支撑,具有向下的作用力以起到支撑作用,而圆弧状的虾背与所述第二扶正段510或所述第一扶正段410相抵接,使其圆锥面具有作用于虾背朝上的力,当在所述第一扶正轮400和所述第二扶正轮500之间的宽度逐渐缩小的情况下,虾背会被所述第二扶正段510或所述第一扶正段410逐渐引导向上移动,直到虾体被扭转成虾背朝上状态,再经过所述第一输出板800和所述第二输出板900,使得虾体保持基本虾背斜向上状态进入所述输送槽242,最后随着所述输送带240输送到各个功能工位。
综上,本发明实施例提供一种虾体扶正装置具有以下优点:(1)利用腰鼓形的所述第一扶正轮400和第二扶正轮500实现对虾体的扶正,使其虾背朝上,无需人工摆动,大大提高了加工效率;(2)利用所述第一支撑架250和所述第二支撑架260使得所述输送带240形成输送槽242,以保持虾体呈虾背朝上的状态进行输送;(3)通过所述第一导向板600和所述第二导向板700引导虾体进入所述第一扶正轮400和第二扶正轮500之间,再利用所述第一输出板800和第二输出板900对接所述输送槽242,提高虾体扶正输送过程中的稳定性。
上方所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。