可移动门式脚手架装置
文献发布时间:2023-06-19 12:24:27
技术领域:
本发明涉及一种可移动门式脚手架装置。
背景技术:
现代工业施工过程中,门式脚手架因其几何尺寸标准化,架构合理,框架稳固,承载能力高等优点被广泛应用到各种高处作业的场所,比如对高空暖气管路进行刷漆防腐,施工人员可通过现场实际情况需要组装门式脚手架进行作业。而在实际工作过程中往往同一平面的作业区域内需要不断更换作业点,来分段式作业,这样一段作业结束后就需要将门式脚手架拆卸后搬运到新的作业地点后再进行组装,这样大大的增加了作业时间和人员工作量。
发明内容:
本发明的目的是提供一种可移动门式脚手架装置,大大的缩短了搬运的时间,同时也较少了人员劳动强度和人员数量,提高了工作效率,本发明结构简单,施工费用低。
本发明的技术方案是:
一种可移动门式脚手架装置,框架(1)为单片模型化设计制造,共有两片框架组成,由第一立柱(13)和第二立柱(14)作为支撑柱,框架(1)横向采用两个交叉斜撑(2)与立柱上的活动滑销(4)连接,框架(1)纵向两侧均采用第一拉杆(15)与第二拉杆(16)焊接固定,框架(1)纵向一个侧面焊接爬梯(5),第一片框架与第二片框架对向布置,第一立柱(13)与第二立柱(14)上均安装移动装置组件,移动装置组件为第一立柱(13)与第二立柱(14)上焊接固定三角固定架(10),三角固定架(10)一端带有三脚架固定螺帽(12),顶起螺杆(7)与三脚架固定螺帽(12)配装连接,手轮(6)与顶起螺杆(7)为焊接连接,顶起螺杆(7)与底座(8)为焊接连接,万向轮(9)与底座(8)通过连接螺栓(11)连接,框架(1)横向两侧第一拉杆(15)固定安装脚手板(3)。
本发明技术效果:
本发明结构简单,操作方便。当到达作业点时可进行门式脚手架的组装工作,组装完毕后逆时针操作手轮(6),由于操作手轮(6)与顶起螺杆(7)为焊接连接,三脚架固定螺帽(12)、三脚固定架(10)与框架(1)依次为焊接连接,顶起螺杆(7)向上旋起时,带起万向轮(9)使其离地,当门式脚手架四个角的万向轮均离地后,门式脚手架稳固与地面接触,施工人员可站在上面进行作业。需要更换作业点时,施工人员从门式脚手架上下来,顺时针操作手轮(6),将万向轮(9)随着顶起螺丝(7)的旋转不断向下,与地面接触后继续顺时针操作手轮(6),直至四个万向轮(9)将门架整体顶起,门式脚手架支腿离地后,施工人员可推动门架进行移动到下一作业点,节省了拆卸和组装的时间和工作量。
本发明已在实际生产工作中得到了应用,在作业面积较大,作业点多的现场应用,大大的缩短了搬运的时间,同时也较少了人员劳动强度和人员数量,提高了工作效率,本发明结构简单,施工费用极低,本发明仅需4个万向轮,所有连接件开采用施工废料,大大的节约了成本。
附图说明
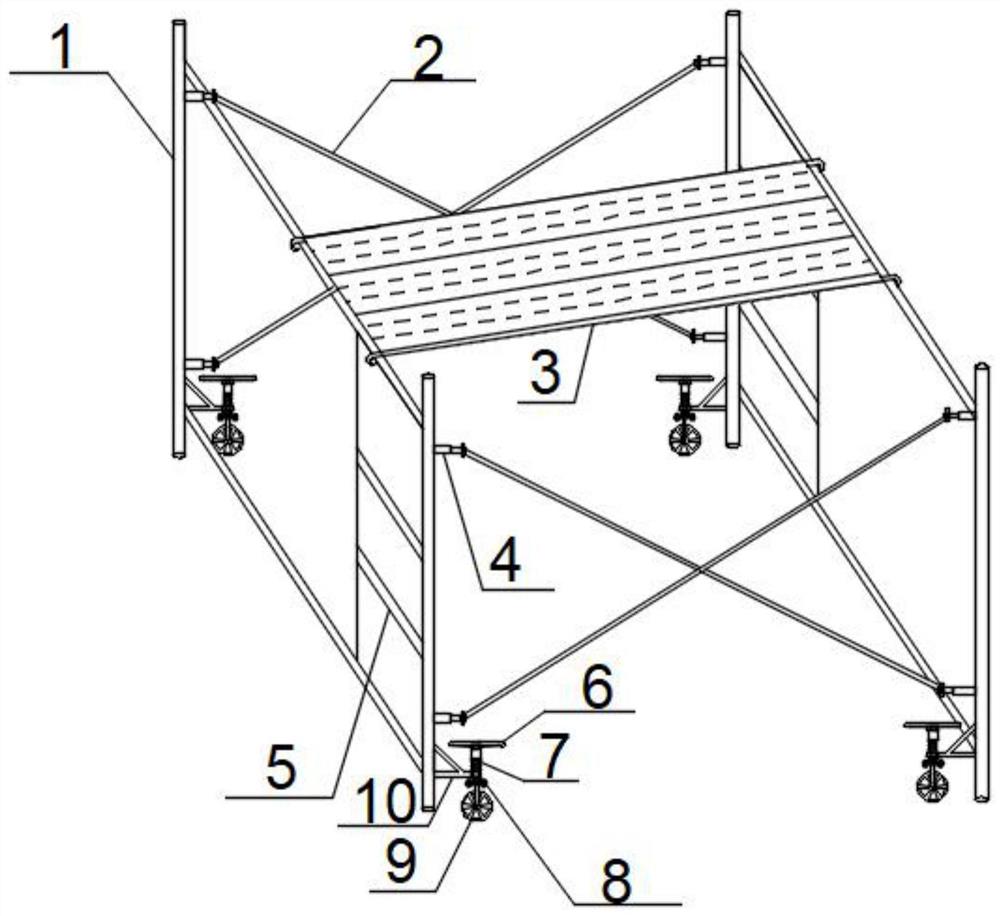
图1为本发明实施例的结构示意图。
图2为手轮与万向轮连接示意图。
图3为三角固定架与门式脚手架框架及固定螺帽连接示意图
图4为单片框架结构示意图
具体实施方式
如图1所示一种可移动门式脚手架装置,框架1为单片模型化设计制造,共有两片框架组成,由第一立柱13和第二立柱14作为支撑柱,框架1横向采用两个交叉斜撑2与立柱上的活动滑销4连接,框架1纵向两侧均采用第一拉杆15与第二拉杆16焊接固定,框架1纵向一个侧面焊接爬梯5,第一片框架与第二片框架对向布置,第一立柱13与第二立柱14上均安装移动装置组件,移动装置组件为第一立柱13与第二立柱14上焊接固定三角固定架10,三角固定架10一端带有三脚架固定螺帽12,顶起螺杆7与三脚架固定螺帽12配装连接,手轮6与顶起螺杆7为焊接连接,顶起螺杆7与底座8为焊接连接,万向轮9与底座8通过连接螺栓11连接,框架1横向两侧第一拉杆15固定安装脚手板3。
如图2所示,顶起螺丝7与三角架固定螺帽12是配套设备,螺杆型号为M24.
如图3所示,三角固定架10与门式脚手架框架1焊接连接,三角固定架10选用φ3无缝钢管,提高强度。固定螺帽12与三角固定架焊接连接。
如图4所示,框架1由第一立柱13、第二立柱14、第一拉杆15、第二拉杆16、爬梯5组成。其中第一立柱13与第二立柱14作为支撑住,第一拉杆15与第二拉杆16作为横向拉杆与第一立柱13和第二立柱14焊接连接,爬梯5与第一拉杆15、第二拉杆16、第二立柱14为焊接连接。
本发明装置可实现大范围作业面的整体搬运门式脚手架,减少了拆卸组装的时间,提高了施工效率,缩减施工人员数量,降低了工作量,投入成本低。