在大腿后部去骨过程中将髋骨和尾骨分离的方法和装置
文献发布时间:2023-06-19 19:14:59
本申请是申请日为2019年1月30日、申请号为201980008443.6、发明名称为“用于将第一和第二骨骼或软骨部分彼此分离的分离装置”的中国发明专利申请的分案申请。
技术领域
本发明涉及一种用于将第一和第二骨骼或软骨部分彼此分离的分离装置。
背景技术
给动物畜体去骨是非常费力的过程,尤其是在将骨骼或软骨部分彼此分离时。许多示例之一是大腿后部上的髋骨与尾骨分离。通常,这是通过在髋骨和尾骨之间的区域中刺入一个巨大的刀,然后通过巨大的力和刀的旋转来断开连接来完成的。如果需要重复执行此操作,则最终会导致操作员的手腕肩膀和/或肘部出现问题,因此在人体工程学上是不可接受的。
另外,在用巨大的刀刺入时,大部分肉块留在了尾骨上,因此对产肉的效能产生了负面影响,这意味着由于不良的效能而导致肉损失的风险相当高。
发明内容
在上述背景下,本发明的实施例的目的是提供一种在将动物畜体去骨时使用的分离装置,其中该分离装置允许以自动或半自动方式将第一和第二骨骼或软骨部分彼此分离。
总体上,本发明优选地试图单独地或以任意的组合缓和、减轻或消除现有技术的上述缺点中的一个或多个。特别地,可以将本发明的实施例的目的看作是提供一种解决上述问题或其他问题的分离装置。
为了更好地解决这些问题中的一个或多个,在本发明的第一方面,提供了一种用于将第一和第二动物骨骼或软骨部分彼此分离的分离装置,该分离装置包括:
·第一结构,其包括第一长形构件和在第一长形构件的端部处的固定接合构件,
·第二结构,其包括第二长形构件和在第二长形构件的端部处的分离构件,
·移动装置,其用于使第二结构相对于固定接合构件从收缩位置移动到闭合位置,在收缩位置,分离构件相对于固定接合构件处于收缩位置,在闭合位置,分离构件和固定接合构件聚拢,
其中在使用期间当分离构件处于收缩位置时,将固定接合构件放置在第一和第二骨骼或软骨部分之间的连接处后面的支撑位置中,并且其中第一结构和第二结构的角度位置调整成使得分离构件朝闭合位置的随后移动与第一和第二骨骼或软骨部分之间的分离区域相交,引起第一和第二骨骼或软骨部分之间的立即分离。
因此,提供了一种在动物畜体去骨期间改善操作员的人体工程学的装置,其中代替了使用例如刀去手动地将例如两个骨骼或软骨部分彼此分离,分离装置可用作执行该分离的工具。
在一个实施例中,第二结构通过适配器块可滑动地附接到第一结构,适配器块允许第二结构沿着第一长形构件来回移动。因此,确保了第一结构和第二结构之间的相对距离总是相同的和准确的,并且提高了产量。
根据本发明的移动装置可以包括任何种类的马达装置、气缸、液压缸等。
在一个实施例中,固定接合构件包括钩状结构。术语“钩状结构”应优选地解释为有利于例如操作员在初始将第一结构移动到初始位置以便将第一结构支撑在所述初始位置的结构。这样的结构可以例如包括V形结构、U形结构、J形结构等。
在一个实施例中,分离构件包括凿状结构。在一个实施例中,凿状结构包括具有锋利的前侧的扁平刀片结构,以及沿着扁平刀片并且部分向上延伸的结构,其中锋利的前侧确保在第一和第二骨骼或软骨部分之间进行干净的切割,随后通过向上延伸的结构在它们之间进行分离。
在一个实施例中,分离装置还包括用于操作员的第一杆和第二杆(手柄或把手),以允许操作员将固定接合构件放置在第二骨骼或软骨后面的所述支撑位置。在一个实施例中,所述第一杆和第二杆可以包括用于启动/解除启动所述移动装置的移动的启动/解除启动机构。
在一个实施例中,分离装置还包括平衡器装置,该平衡器装置用于至少部分地承载分离装置,同时允许操作员操纵分离装置。
因此,分离装置可以用作手持式或半手持式装置,其中操作员可以将固定接合构件准确地定位在第二骨骼或软骨部分后面的所述初始位置,同时为操作员保持人体工程学条件。
作为示例,所述第一和第二骨骼或软骨部分可以是在大腿后部去骨过程中将髋骨与尾骨分离。然而,这不应被解释为限于大腿后部去骨以及将髋骨与尾骨之间的连接分离或断开。分离装置可以适于各种动物畜体的各种去骨。
参照该示例,当将髋骨与尾骨分离时,操作员握住第一杆和第二杆,以便通过将接合构件例如所述钩定位在尾骨与髋骨的连接处的后面来操纵该分离装置,在此接合构件保持静止。分离构件例如所述凿,放置在髂骨翼的顶部。随后,出于安全考虑,操作员通过例如同时按下两个杆来启动移动装置。移动装置例如所述空气活塞然后向外移动,从而引导凿经过髂骨翼,以确保在尾骨和臀骨之间的软骨连接处或附近,使尾骨和髋骨裂开,并在凿到达完全延伸位置时使最后的骨骼连接破裂。然后,操作员可以松开一个杆或优选地松开两个杆,以使装置返回到起始位置,并可以从大腿部分中移除。
在一个实施例中,分离装置附接到机器人装置。作为示例,机器人装置可以包括视觉系统,以用于将固定接合构件准确且自动地定位在第二骨骼后面的所述初始位置,并自动移除骨骼之间的连接,从而将第一和第二骨骼或软骨部分彼此分离。
在本发明的第二方面,提供了一种使用分离装置将第一和第二动物骨骼或软骨部分彼此分离的方法,其中,所述分离装置包括:
·第一结构,其包括第一长形构件和在第一长形构件的端部处的固定接合构件,
·第二结构,其包括第二长形构件和在第二长形构件的端部处的分离构件,
·移动装置,其用于使第二结构相对于固定接合构件从收缩位置移动到闭合位置,在收缩位置,分离构件相对于固定接合构件处于收缩位置,在闭合位置,分离构件和固定接合构件聚拢,
·其中,该方法包括:
·当分离构件处于收缩位置时,将接合构件放置在第一和第二骨骼或软骨部分之间的连接处后面的支撑位置,
·调整第一结构和第二结构的角度位置,使得分离构件朝向闭合位置的随后移动与第一和第二骨骼或软骨部分之间的分离区域相交,引起第一和第二骨骼或软骨部分之间的立即分离。
许多示例之一是在大腿部分上将髋骨与尾骨分离。通常,这是通过在髋骨和尾骨之间的区域中刺入一个巨大的刀,然后通过巨大的力和刀的旋转来断开连接来完成的。如果需要重复执行此操作,则最终会导致操作员的手腕肩膀和/或肘部出现问题,因此在人体工程学上是不可接受的。
另外,在刺入巨大刀时大部分肉块留在了尾骨上,因此对肉产量的负面影响意味着由于执行该过程的操作员的不良的效能而导致肉损失的风险相当高。使用根据本发明实施例的分离装置将减轻或消除这些问题并提高产量。
附图说明
将参照附图仅通过示例的方式描述本发明的实施例,其中
图1a-图1b和图2a-图2b描绘了根据本发明的用于将第一和第二骨骼或软骨部分彼此分离的分离装置;
图3a-图3b示出了相对于根据本发明的分离装置使用的分离构件的一个实施例的更详细的视图;
图4示出了相对于根据本发明的分离装置使用的固定接合构件的一个实施例的更详细的视图;以及
图5和图6显示了猪的解剖结构。
具体实施方式
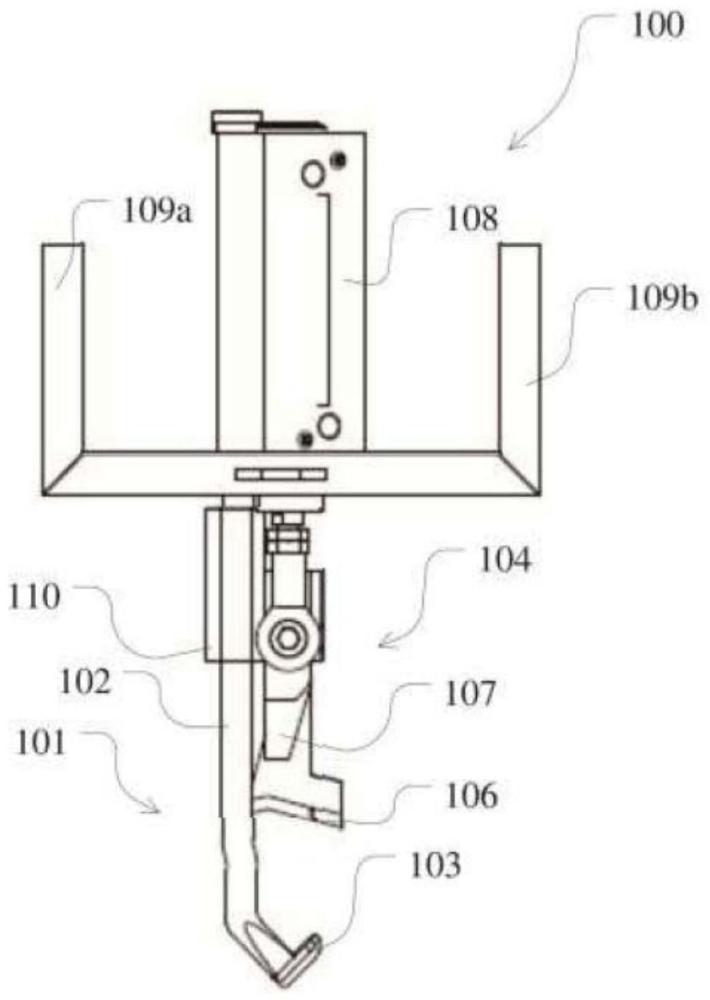
图1a-图1b和图2a-图2b描绘了根据本发明的用于将第一和第二骨骼或软骨部分彼此分离的分离装置100。应当注意,术语“第一骨骼或软骨部分和第二骨骼或软骨部分”可以理解为例如图4和图5中示出的骨骼/软骨之间的所有连接。当然,这不应该解释为仅仅局限于猪肉,分离装置也可以在对其他动物例如牛畜体、羊畜体等去骨的过程中使用。
分离装置的第一结构101包括第一长形构件102和在第一长形构件101的端部处的固定接合构件103,第二结构104包括第二长形构件105和第二长形构件104的端部处的分离构件106。在本文示出的实施例中,固定接合构件包括钩状结构,而分离构件包括凿状结构,该凿状结构包括锋利刀片106以及沿着扁平刀片的向上延伸的结构107。
分离装置100还包括移动装置108或例如气缸的马达,用于使第二结构104相对于固定接合构件103和第一长形构件102从图1a和图2a所示的收缩位置移动到图1b和图2b所示的闭合位置,其中在收缩位置,分离构件106、107相对于固定接合构件103处于收缩位置,在闭合位置,分离构件和固定接合构件聚拢,即彼此相邻。为了促进该来回移动,提供了适配器块110,第二结构104附接到该适配器块110,其中,适配器块110可滑动地附接到第一结构,并且允许第二结构以如箭头所示的平行并沿着第一长形构件102来回移动。
分离装置100还包括用作操纵杆的第一杆109a和第二杆109b,以允许操作员使用两只手/手臂来操作该装置。在优选的实施例中,第一杆和第二杆包括用于启动/解除启动所述移动装置108的启动/解除启动机构。由于分离装置100的重量,其可以附接到平衡器装置,以至少部分地承载分离装置,同时允许操作员在x-y-z方向上操纵分离装置,并且优选地在使用过程中还旋转分离装置。
图1a和图2a示出了处于所述收缩位置的分离装置100。在该位置,操作员使用操纵杆将固定接合构件103—在这种情况下为钩103—定位在第一和第二骨骼或软骨部分(未示出)的连接处后面,从而使骨骼或软骨部分位于固定接合构件和分离构件之间。作为示例,在对大腿部分去骨的情况下,这可以涉及将钩103放置在尾骨和髋骨的后面。在此移动中,操作员会进行适当的调整,例如装置的角度调整,以使分离构件随后通过所述启动/解除启动机构移动。图1b和图2b示出了第二结构104朝向闭合位置移动并且与第一和第二骨骼或软骨部分之间的分离区域相交,引起第一和第二骨骼或软骨部分之间的立即分离的情况。参照所述示例,刀片106被引导经过臀骨的“翼”,以确保在尾骨和臀骨之间的软骨连接处或附近,使尾骨和髋骨裂开,并且在凿到达完全延伸位置时使最后的骨骼连接破裂。后续步骤通常将是松开一个杆或优选地松开两个杆,以使该装置返回到起始位置。
图3a和图3b示出了分离构件的一个实施例的更详细的视图,该分离构件在本文中所示包括凿状结构,该凿状结构包括锋利刀片206,以及沿着扁平刀片的向上延伸的结构207。该设计不应被解释为限于本文所示的内容,例如刀片206和结构207之间的高度比以及刀片206的前侧当然可以不同。
图4示出了固定接合构件303的一个实施例,但是当然可以应用和设计任何形状,以确保可以将接合构件放置在支撑位置。
尽管已经在附图和前面的描述中详细地图示和描述了本发明,但是这样的图示和描述应被认为是说明性或示例性而非限制性的;本发明不限于所公开的实施例。
通过研究附图、公开内容和所附权利要求,本领域技术人员在实践所要求保护的发明时可以理解和实现所公开的实施例的其他变型。在权利要求中,词语“包括”不排除其他元件或步骤,并且不定冠词“一”或“一个”不排除多个。在相互不同的从属权利要求中记载某些措施的事实并不表示不能有利地使用这些措施的组合。