一种玻璃幕墙清洗系统及清洗方法
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及自动化清洁设备技术领域,尤其涉及一种玻璃幕墙清洗系统及清洗方法。
背景技术
玻璃幕墙,是指由支承结构体系可相对主体结构有一定位移能力、不分担主体结构所受作用的建筑外围护结构或装饰结构,玻璃幕墙对建筑有较好的美化效果,广泛应用于各种建筑外墙,例如写字楼、图书馆、体育馆等高层建筑。
玻璃幕墙一般都设置在室外,因此需要经常进行清洗,由于玻璃幕墙的高度较高,在清洗时,通常需要清洗工人通过升降平台或者吊篮进行玻璃幕墙的清洗,虽然此方法方便清洗玻璃幕墙,但清洗工人的劳动强度太大,存在安全隐患。
发明内容
本发明的目的是克服现有技术中存在的人工清洗强度高、不安全的缺陷与问题,提供一种自动化清洗、清洗安全的玻璃幕墙清洗系统及清洗方法。
为实现以上目的,本发明的技术解决方案是:
一种玻璃幕墙清洗系统,包括厢体、运动模块、动力模块、清洗模块、信号采集模块、信号处理模块、控制模块,厢体相对于墙面布置,运动模块连接在厢体的上下两侧,动力模块、清洗模块、信号采集模块、信号处理模块、控制模块均设置在厢体内,控制模块分别与动力模块、信号采集模块相连接,动力模块分别与运动模块、清洗模块相连接,清洗模块相对于墙面布置,信号处理模块分别与信号采集模块、控制模块连接;
所述控制模块,用于将控制指令分别发送给动力模块和信号采集模块;
所述动力模块,用于开启和关闭运动模块和清洗模块;
所述运动模块,用于控制厢体在墙面上进行上下移动;
所述清洗模块,用于将墙面的污渍进行清洗;
所述信号采集模块,用于获取清洗区域的图像信息,并将图像信息发送给信号处理模块;
所述信号处理模块,用于接收图像信息,并将处理后的图像信息发送给控制模块。
所述运动模块包括两个三角轮盘、三个长轴,所述动力模块包括气泵,所述厢体的上下两侧均设置有固定吸盘,两个所述固定吸盘的中心处均设置有吸管,所述吸管的一端与所述固定吸盘相连通、另一端穿过所述厢体后与气泵相连通,两个所述三角轮盘的上下两侧均设置有圆形吸盘,四个所述圆形吸盘的中心处均设置有吸管,位于所述圆形吸盘上的吸管的一端与所述圆形吸盘相连通、另一端依次穿过三角轮盘、厢体后与气泵相连通,三个所述长轴依次横向贯穿于所述厢体,三个所述长轴的两端设置有连杆,所述连杆的一端套设于所述长轴,所述连杆的另一端转动连接有转轴,位于左侧的三个转轴分别转动连接于位于左侧的三角轮盘的三个顶点处,位于右侧的三个转轴分别转动连接于位于右侧的三角轮盘的三个顶点处。
所述清洗模块包括墙刷架、滑座、连接轴、蓄水装置,所述墙刷架为矩形框架结构,所述墙刷架连接于所述厢体的内侧壁,所述滑座竖直布置且沿水平方向滑动连接于所述墙刷架,所述滑座沿竖直方向开设有通槽,所述连接轴竖直连接于所述滑座且相对于所述通槽布置,所述连接轴的外周面由上至下依次套设有上墙刷、刷杆、下墙刷,所述上墙刷、下墙刷均采用可压缩泡沫刷,所述刷杆的一端的上侧与所述上墙刷相贴合、所述刷杆的一端的下侧与所述下墙刷相贴合,所述刷杆的另一端穿过所述通槽后连接有链条传动组件,所述刷杆滑动连接于所述连接轴()、通槽,所述链条传动组件用于控制刷杆沿墙刷架作周向运动,所述蓄水装置相对于所述上墙刷、下墙刷布置。
所述链条传动组件包括链条和四个链轮,四个所述链轮均通过连接板连接于所述墙刷架,四个所述链轮均布于所述墙刷架的四个顶点处,所述链条套设于四个所述链轮的外周,所述刷杆的另一端插接于所述链条。
所述滑座的上下两侧分别开设有进水口和排污口,所述滑座内开设有清洗水槽,所述清洗水槽的一侧与所述进水口相连通,所述清洗水槽的另一侧与所述排污口相连通,所述蓄水装置的出水端与所述进水口相连通,所述蓄水装置的进水端与所述排污口相连通,所述上墙刷、下墙刷相对于所述清洗水槽布置。
所述连接轴的上下两端通过轴承转动连接于所述滑座。
所述清洗模块包括激光清洗架、滑杆、激光头,所述激光清洗架连接于所述厢体的内侧壁,所述滑杆横向布置于所述激光清洗架内且沿竖直方向滑动连接于所述激光清洗架,所述激光头套设于所述滑杆且滑动连接于所述滑杆。
所述信号采集模块包括两个电子眼,两个所述电子眼对称设置在所述厢体的两个内侧壁。
一种玻璃幕墙清洗方法,所述清洗方法包括以下步骤:
S1、将运动模块和厢体放置在墙面上,清洗模块对准墙面;
S2、控制模块将控制指令发送给清洗模块,清洗模块清洗墙面;
S3、信号采集模块采集清洗区域的图像信息,并将图像信息发送给信号处理模块,信号处理模块将图像信息进行处理,并将处理后的图像信息发送给控制模块;
S4、控制模块判断清洗区域的图像中是否存在污渍,若不存在,则控制模块将控制指令发送给运动模块,运动模块控制厢体向上移动一段距离并固定,然后重复步骤S2-S4直至墙面清洗完毕;若存在污渍,则重复步骤S2-S4直至该清洗区域污渍完全去除。
所述步骤S2中,清洗模块清洗墙面的具体步骤为:
S21、蓄水装置开始供水,清水从进水口进入清洗水槽,并使上墙刷和下墙刷沾满水,清水同时从清洗水槽进入排污口,回流到蓄水装置内;
S22、转轴转动90度,使上墙刷、下墙刷同步转动90度,四个链轮同时顺时针转动,链条同步转动,刷杆在链条的带动下向上移动,上墙刷压缩,上墙刷上的污渍排进清洗水槽,污水随槽内流水从排污口排出,同时下墙刷拉伸并向上清洗墙面,当刷杆移动到链条的第一个拐角处时,此时刷杆位于连接轴的最上方;
S23、链条继续转动,刷杆在链条的带动下向右移动,带动滑座、连接轴、上墙刷、下墙刷在墙刷架内向右同步移动,下墙刷向右清洗墙面,当刷杆移动到链条的第二个拐角处时,滑座停止滑动;
S24、链条继续转动,刷杆在链条的带动下向下移动,上墙刷拉伸并向下清洗墙面,下墙刷压缩,下墙刷上的污渍排进清洗水槽,污水随槽内流水从排污口排出,当刷杆移动到链条的第三个拐角处时,此时刷杆位于连接轴的最下方;
S25、链条继续转动,刷杆在链条的带动下向左移动,带动滑座、连接轴、上墙刷、下墙刷在墙刷架内向左同步移动,上墙刷向左清洗墙面,当刷杆移动到链条的第四个拐角处后,滑座停止滑动,刷杆在链条的带动下向上移动,当刷杆移动至连接轴的中间位置时,上墙刷、下墙刷恢复原状;
S26、重复步骤S22-S25,直至该清洗区域的墙面清洗干净。
与现有技术相比,本发明的有益效果为:
1、本发明一种玻璃幕墙清洗系统及清洗方法中,通过设置运动模块和厢体,运动模块附着在墙面上,厢体中的清洗模块正对于墙面,用于将墙面的污渍进行清洗,通过信号采集模块和处理模块获取清洗区域的信息,当没有污渍时,通过控制模块带动运动模块在墙面上移动,然后再通过清洗模块清洗下一个清洗区域,通过多个模块组合的方式,可实现墙面的自动化清理。因此,本发明可实现自动化清洗且安全可靠。
2、本发明一种玻璃幕墙清洗系统及清洗方法中,在清洗时,气泵吸气,吸盘吸附在墙面上,运动模块和厢体相对固定,当清洗完成时,四个圆形吸盘上的气泵先进行放气,使四个圆形吸盘脱离墙面,然后动力模块控制三个长轴转动,使两个三角轮盘绕长轴转动,四个圆形吸盘同步转动,转动至四个圆形吸盘接触到墙面时,控制气泵吸气,四个圆形吸盘固定,然后控制固定吸盘上的气泵放气,固定吸盘脱离墙面,控制模块继续控制长轴转动,厢体和连杆绕转轴转动,固定吸盘同步向上转动,当固定吸盘接触到墙面时,气泵吸气,固定吸盘固定在墙面上,通过采用吸盘的方式,当吸盘负压时,便可吸附在墙面上,通过圆形吸盘和固定吸盘交替与墙面接触吸气、放气,便可实现厢体和其内部的结构在墙面上进行稳定攀爬。因此,本发明结构简单、运动过程稳定。
3、本发明一种玻璃幕墙清洗系统及清洗方法中,通过采用滑座和连接轴,滑座可在墙刷架上来回滑动,上墙刷和下墙刷可在连接轴上来回滑动;通过链轮和链条的连接方式,链条顺时针转动,与链条连接的刷杆同步移动,使上墙刷压缩、下墙刷拉伸,当刷杆移动到链条的拐角处时,此时刷杆移动至连接轴的最上方,链条继续移动时,会带着刷杆向右移动,使滑杆、上墙刷、下墙刷同步向右移动,下墙刷对墙面进行清洗,刷杆移动到最右方后,在链条的带动下,向下移动,使上墙刷拉伸、下墙刷压缩,链条转动一周后,滑杆左右滑动一次,上墙刷和下墙刷分别对墙面进行清洗,链条多次转动,使上墙刷和下墙刷多次对墙面进行清洗,通过蓄水装置提供水源,可将墙面的污渍进行去除。因此,本发明清洗效果好、清洗过程稳定。
4、本发明一种玻璃幕墙清洗系统及清洗方法中,连接轴可在滑杆上转动,使上墙刷和下墙刷在移动前可进行转动,清洗一次便转动一次,将上墙刷和下墙刷未工作的区域转出,方便下次清洗,可以避免上墙刷和下墙刷多次清洗后,清洗部分附着污渍导致后续清洗效果变差;通过设置清洗水槽,使上墙刷和下墙刷滚动时沾满清水,同时上墙刷和下墙刷压缩时,其中的污水也可以排进清洗水槽内;通过设置进水口和污水口,可持续提供清水,并将使用后的污水排出。因此,本发明清洗效果好、清洗过程稳定。
5、本发明一种玻璃幕墙清洗系统及清洗方法中,通过设置激光头,激光头可通过激光去除污渍,可有效去除顽固污渍,清洗效果好,通过滑杆可实行激光头上下滑动,同时激光头可在滑杆上左右滑动,可实现激光头的各个方向的移动。因此,本发明清洗效果好。
6、本发明一种玻璃幕墙清洗系统及清洗方法中,先通过清洗模块对待清洗区域进行清洗,同时通过信号采集模块和处理模块收集信息,并反馈到控制模块,可以实时监测清洗效果,避免多次清洗产生浪费,清洗模块和运动模块交替工作,清洗过程稳定可控,清洗效果较好。因此,本发明清洗效果好。
附图说明
图1是本发明中一种玻璃幕墙清洗系统的结构示意图。
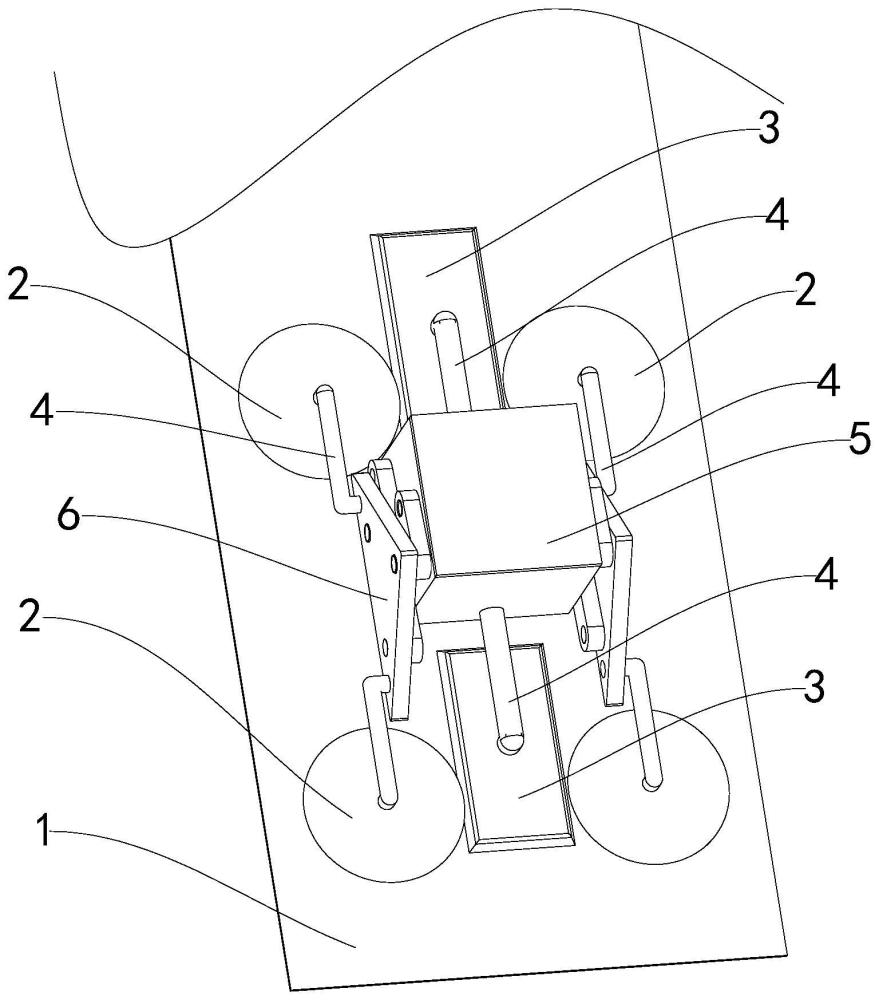
图2是本发明中厢体、运动模块的结构示意图。
图3是本发明中运动模块的结构示意图。
图4是本发明中厢体的后视示意图。
图5是本发明中墙刷架、滑座、上墙刷、刷杆、下墙刷的结构示意图。
图6是本发明中滑座、链条、链轮的结构示意图。
图7是本发明中滑座、连接轴的结构示意图。
图8是本发明中厢体、电子眼、激光清洗架的结构示意图。
图9是本发明中激光清洗架、滑杆、激光头的结构示意图。
图10是本发明一种玻璃幕墙清洗系统的连接示意图。
图11是本发明中实施例1提供的一种玻璃幕墙清洗方法的流程示意图。
图12是本发明中实施例3提供的一种玻璃幕墙清洗方法的流程示意图。
图中:墙面1、圆形吸盘2、固定吸盘3、吸管4、厢体5、三角轮盘6、转轴7、连杆8、长轴9、墙刷架10、滑座11、连接轴12、上墙刷13、刷杆14、下墙刷15、链条16、链轮17、连接板18、进水口19、排污口20、清洗水槽21、激光清洗架22、滑杆23、激光头24、电子眼25、滑槽26。
具体实施方式
以下结合附图说明和具体实施方式对本发明作进一步详细的说明。
参见图1至图12,一种玻璃幕墙清洗系统,包括厢体5、运动模块、动力模块、清洗模块、信号采集模块、信号处理模块、控制模块,厢体5相对于墙面1布置,运动模块连接在厢体5的上下两侧,动力模块、清洗模块、信号采集模块、信号处理模块、控制模块均设置在厢体5内,控制模块分别与动力模块、信号采集模块相连接,动力模块分别与运动模块、清洗模块相连接,清洗模块相对于墙面1布置,信号处理模块分别与信号采集模块、控制模块连接;
所述控制模块,用于将控制指令分别发送给动力模块和信号采集模块;
所述动力模块,用于开启和关闭运动模块和清洗模块;
所述运动模块,用于控制厢体5在墙面1上进行上下移动;
所述清洗模块,用于将墙面1的污渍进行清洗;
所述信号采集模块,用于获取清洗区域的图像信息,并将图像信息发送给信号处理模块;
所述信号处理模块,用于接收图像信息,并将处理后的图像信息发送给控制模块。
所述运动模块包括两个三角轮盘6、三个长轴9,所述动力模块包括气泵,所述厢体5的上下两侧均设置有固定吸盘3,两个所述固定吸盘3的中心处均设置有吸管4,所述吸管4的一端与所述固定吸盘3相连通、另一端穿过所述厢体5后与气泵相连通,两个所述三角轮盘6的上下两侧均设置有圆形吸盘2,四个所述圆形吸盘2的中心处均设置有吸管4,位于所述圆形吸盘2上的吸管4的一端与所述圆形吸盘2相连通、另一端依次穿过三角轮盘6、厢体5后与气泵相连通,三个所述长轴9依次横向贯穿于所述厢体5,三个所述长轴9的两端设置有连杆8,所述连杆8的一端套设于所述长轴9,所述连杆8的另一端转动连接有转轴7,位于左侧的三个转轴7分别转动连接于位于左侧的三角轮盘6的三个顶点处,位于右侧的三个转轴7分别转动连接于位于右侧的三角轮盘6的三个顶点处。
所述清洗模块包括墙刷架10、滑座11、连接轴12、蓄水装置,所述墙刷架10为矩形框架结构,所述墙刷架10连接于所述厢体5的内侧壁,所述滑座11竖直布置且沿水平方向滑动连接于所述墙刷架10,所述滑座11沿竖直方向开设有通槽26,所述连接轴12竖直连接于所述滑座11且相对于所述通槽26布置,所述连接轴12的外周面由上至下依次套设有上墙刷13、刷杆14、下墙刷15,所述上墙刷13、下墙刷15均采用可压缩泡沫刷,所述刷杆14的一端的上侧与所述上墙刷13相贴合、所述刷杆14的一端的下侧与所述下墙刷15相贴合,所述刷杆14的另一端穿过所述通槽26后连接有链条传动组件,所述刷杆14滑动连接于所述连接轴(12)、通槽26,所述链条传动组件用于控制刷杆14沿墙刷架10作周向运动,所述蓄水装置相对于所述上墙刷13、下墙刷15布置。
所述链条传动组件包括链条16和四个链轮17,四个所述链轮17均通过连接板18连接于所述墙刷架10,四个所述链轮17均布于所述墙刷架10的四个顶点处,所述链条16套设于四个所述链轮17的外周,所述刷杆14的另一端插接于所述链条16。
所述滑座11的上下两侧分别开设有进水口19和排污口20,所述滑座11内开设有清洗水槽21,所述清洗水槽21的一侧与所述进水口19相连通,所述清洗水槽21的另一侧与所述排污口20相连通,所述蓄水装置的出水端与所述进水口19相连通,所述蓄水装置的进水端与所述排污口20相连通,所述上墙刷13、下墙刷15相对于所述清洗水槽21布置。
所述连接轴12的上下两端通过轴承转动连接于所述滑座11。
所述清洗模块包括激光清洗架22、滑杆23、激光头24,所述激光清洗架22连接于所述厢体5的内侧壁,所述滑杆23横向布置于所述激光清洗架22内且沿竖直方向滑动连接于所述激光清洗架22,所述激光头24套设于所述滑杆23且滑动连接于所述滑杆23。
所述信号采集模块包括两个电子眼25,两个所述电子眼25对称设置在所述厢体5的两个内侧壁。
一种玻璃幕墙清洗方法,所述清洗方法包括以下步骤:
S1、将运动模块和厢体5放置在墙面1上,清洗模块对准墙面1;
S2、控制模块将控制指令发送给清洗模块,清洗模块清洗墙面1;
S3、信号采集模块采集清洗区域的图像信息,并将图像信息发送给信号处理模块,信号处理模块将图像信息进行处理,并将处理后的图像信息发送给控制模块;
S4、控制模块判断清洗区域的图像中是否存在污渍,若不存在,则控制模块将控制指令发送给运动模块,运动模块控制厢体5向上移动一段距离并固定,然后重复步骤S2-S4直至墙面1清洗完毕;若存在污渍,则重复步骤S2-S4直至该清洗区域污渍完全去除。
所述步骤S2中,清洗模块清洗墙面1的具体步骤为:
S21、蓄水装置开始供水,清水从进水口19进入清洗水槽21,并使上墙刷13和下墙刷15沾满水,清水同时从清洗水槽21进入排污口20,回流到蓄水装置内;
S22、转轴7转动90度,使上墙刷13、下墙刷15同步转动90度,四个链轮17同时顺时针转动,链条16同步转动,刷杆14在链条16的带动下向上移动,上墙刷13压缩,上墙刷13上的污渍排进清洗水槽21,污水随槽内流水从排污口20排出,同时下墙刷15拉伸并向上清洗墙面1,当刷杆14移动到链条16的第一个拐角处时,此时刷杆14位于连接轴12的最上方;
S23、链条16继续转动,刷杆14在链条16的带动下向右移动,带动滑座11、连接轴12、上墙刷13、下墙刷15在墙刷架10内向右同步移动,下墙刷15向右清洗墙面1,当刷杆14移动到链条16的第二个拐角处时,滑座11停止滑动;
S24、链条16继续转动,刷杆14在链条16的带动下向下移动,上墙刷13拉伸并向下清洗墙面1,下墙刷15压缩,下墙刷15上的污渍排进清洗水槽21,污水随槽内流水从排污口20排出,当刷杆14移动到链条16的第三个拐角处时,此时刷杆14位于连接轴12的最下方;
S25、链条16继续转动,刷杆14在链条16的带动下向左移动,带动滑座11、连接轴12、上墙刷13、下墙刷15在墙刷架10内向左同步移动,上墙刷13向左清洗墙面1,当刷杆14移动到链条16的第四个拐角处后,滑座11停止滑动,刷杆14在链条16的带动下向上移动,当刷杆14移动至连接轴12的中间位置时,上墙刷13、下墙刷15恢复原状;
S26、重复步骤S22-S25,直至该清洗区域的墙面1清洗干净。
本发明的原理说明如下:
本发明中,动力模块还包括伺服电机、驱动电机、旋转电机、气缸,伺服电机用于控制连接轴12在滑座11上间歇旋转,驱动电机用于驱动长轴9转动,旋转电机用于控制四个链轮17同步转动,气缸用于控制滑杆23在激光清洗架22内来回滑动、控制激光头24在滑杆23上来回滑动,蓄水装置包括水泵、蓄水池、污水池,水泵分别连接进水口19和蓄水池,污水池与排污口20相连通,蓄水池内存储有清水,蓄水池与污水池之间设置有过滤装置,过滤装置可采用现有的过滤设备,例如过滤器等结构,供水时,通过水泵从蓄水池内取出清水并引入到进水口19中,清洗过程中产生的污水通过排污口20排入到污水池内,污水经过过滤装置回流到蓄水池内。
使用时,首先将运动模块和厢体5放置在墙面1上,控制模块控制气泵进行吸气,四个圆形吸盘2和两个固定吸盘3保持负压状态,整个装置牢牢吸附在墙面1上,然后水泵开始供水,清水进入到上墙刷13和下墙刷15内,控制模块控制伺服电机工作,使连接轴12、上墙刷13、下墙刷15转动90度,同时旋转电机同步工作,带动链条16顺时针转动,刷杆14向上移动,上墙刷13压缩、下墙刷15拉伸,当刷杆14移动到链条16的拐角处时,此时刷杆14位于连接轴12的最上方,上墙刷13上的污渍排进清洗水槽21,污水随槽内流水从排污口20排出,同时下墙刷15向上清洗墙面1,刷杆14在链条16的带动下继续向右移动,带动滑座11在墙刷架10内向右移动,下墙刷15向右清洗墙面1,当刷杆14移动到链条16的第二个拐角处时,滑座11停止滑动,此时刷杆14向下移动,上墙刷13拉伸、下墙刷15压缩,下墙刷15的污渍挤压到清洗水槽21内,污水随槽内流水从排污口20排出,当刷杆14移动到链条16的第三个拐角处后,带动滑座11在墙刷架10内向左移动,上墙刷13向左清洗墙面1,当刷杆14移动到链条16的第四个拐角处后,滑座11停止滑动,刷杆14继续向上移动,移动至连接轴12的中间位置时,旋转电机停止工作,伺服电机工作,使连接轴12、上墙刷13、下墙刷15再次转动90度,然后旋转电机继续工作,按之前的步骤进行墙面1的清洗,清洗结束后,通过电子眼25收集清洗区域的图像信息,信号处理模块处理后,将污渍信息发送给控制模块,若还存在污渍,控制模块控制气缸工作,使激光头24移动到污渍处,激光头24通过激光将污渍进行清理。
清理结束后,控制模块控制四个圆形吸盘2上的气泵先进行放气,四个圆形吸盘2脱离墙面1,然后驱动电机控制三个长轴9转动,使两个三角轮盘6绕长轴9逆时针转动180度,四个圆形吸盘2同步转动并接触到墙面1,此时气泵吸气,四个圆形吸盘2固定,控制模块再控制固定吸盘3上的气泵放气,固定吸盘3脱离墙面1,控制模块继续控制长轴9转动,使连杆8和长轴9绕三角轮盘6逆时针转动180度,固定吸盘3和厢体5同步向上转动,固定吸盘3接触到墙面1,此时气泵吸气,固定吸盘3固定在墙面1上,然后清洗模块进行清洗工作,清洗模块和运动模块往复工作后,墙面1整体清洗完毕,控制模块控制气泵放气,将装置取下。
实施例1:
参见图1、图10,一种玻璃幕墙清洗系统,包括厢体5、运动模块、动力模块、清洗模块、信号采集模块、信号处理模块、控制模块,厢体5相对于墙面1布置,运动模块连接在厢体5的上下两侧,动力模块、清洗模块、信号采集模块、信号处理模块、控制模块均设置在厢体5内,控制模块分别与动力模块、信号采集模块相连接,动力模块分别与运动模块、清洗模块相连接,清洗模块相对于墙面1布置,信号处理模块分别与信号采集模块、控制模块连接;
所述控制模块,用于将控制指令分别发送给动力模块和信号采集模块;
所述动力模块,用于开启和关闭运动模块和清洗模块;
所述运动模块,用于控制厢体5在墙面1上进行上下移动;
所述清洗模块,用于将墙面1的污渍进行清洗;
所述信号采集模块,用于获取清洗区域的图像信息,并将图像信息发送给信号处理模块;
所述信号处理模块,用于接收图像信息,并将处理后的图像信息发送给控制模块。
参见图11,一种玻璃幕墙清洗方法,所述清洗方法包括以下步骤:
S1、将运动模块和厢体5放置在墙面1上,清洗模块对准墙面1;
S2、控制模块将控制指令发送给清洗模块,清洗模块清洗墙面1;
S3、信号采集模块采集清洗区域的图像信息,并将图像信息发送给信号处理模块,信号处理模块将图像信息进行处理,并将处理后的图像信息发送给控制模块;
S4、控制模块判断清洗区域的图像中是否存在污渍,若不存在,则控制模块将控制指令发送给运动模块,运动模块控制厢体5向上移动一段距离并固定,然后重复步骤S2-S4直至墙面1清洗完毕;若存在污渍,则重复步骤S2-S4直至该清洗区域污渍完全去除。
实施例2:
基本内容等同于实施例1,不同之处在于:
参见图2至图3,所述运动模块包括两个三角轮盘6、三个长轴9,所述动力模块包括气泵,所述厢体5的上下两侧均设置有固定吸盘3,两个所述固定吸盘3的中心处均设置有吸管4,所述吸管4的一端与所述固定吸盘3相连通、另一端穿过所述厢体5后与气泵相连通,两个所述三角轮盘6的上下两侧均设置有圆形吸盘2,四个所述圆形吸盘2的中心处均设置有吸管4,位于所述圆形吸盘2上的吸管4的一端与所述圆形吸盘2相连通、另一端依次穿过三角轮盘6、厢体5后与气泵相连通,三个所述长轴9依次横向贯穿于所述厢体5,三个所述长轴9的两端设置有连杆8,所述连杆8的一端套设于所述长轴9,所述连杆8的另一端转动连接有转轴7,位于左侧的三个转轴7分别转动连接于位于左侧的三角轮盘6的三个顶点处,位于右侧的三个转轴7分别转动连接于位于右侧的三角轮盘6的三个顶点处。
参见图4至图7,所述清洗模块包括墙刷架10、滑座11、连接轴12、蓄水装置,所述墙刷架10为矩形框架结构,所述墙刷架10连接于所述厢体5的内侧壁,所述滑座11竖直布置且沿水平方向滑动连接于所述墙刷架10,所述滑座11沿竖直方向开设有通槽26,所述连接轴12竖直连接于所述滑座11且相对于所述通槽26布置,所述连接轴12的外周面由上至下依次套设有上墙刷13、刷杆14、下墙刷15,所述上墙刷13、下墙刷15均采用可压缩泡沫刷,所述刷杆14的一端的上侧与所述上墙刷13相贴合、所述刷杆14的一端的下侧与所述下墙刷15相贴合,所述刷杆14的另一端穿过所述通槽26后连接有链条传动组件,所述刷杆14滑动连接于所述连接轴(12)、通槽26,所述链条传动组件用于控制刷杆14沿墙刷架10作周向运动,所述蓄水装置相对于所述上墙刷13、下墙刷15布置。
参见图5至图6,所述链条传动组件包括链条16和四个链轮17,四个所述链轮17均通过连接板18连接于所述墙刷架10,四个所述链轮17均布于所述墙刷架10的四个顶点处,所述链条16套设于四个所述链轮17的外周,所述刷杆14的另一端插接于所述链条16。
参见图6,所述滑座11的上下两侧分别开设有进水口19和排污口20,所述滑座11内开设有清洗水槽21,所述清洗水槽21的一侧与所述进水口19相连通,所述清洗水槽21的另一侧与所述排污口20相连通,所述蓄水装置的出水端与所述进水口19相连通,所述蓄水装置的进水端与所述排污口20相连通,所述上墙刷13、下墙刷15相对于所述清洗水槽21布置。
参见图7,所述连接轴12的上下两端通过轴承转动连接于所述滑座11。
参见图8,所述信号采集模块包括两个电子眼25,两个所述电子眼25对称设置在所述厢体5的两个内侧壁。
所述步骤S2中,清洗模块清洗墙面1的具体步骤为:
S21、蓄水装置开始供水,清水从进水口19进入清洗水槽21,并使上墙刷13和下墙刷15沾满水,清水同时从清洗水槽21进入排污口20,回流到蓄水装置内;
S22、转轴7转动90度,使上墙刷13、下墙刷15同步转动90度,四个链轮17同时顺时针转动,链条16同步转动,刷杆14在链条16的带动下向上移动,上墙刷13压缩,上墙刷13上的污渍排进清洗水槽21,污水随槽内流水从排污口20排出,同时下墙刷15拉伸并向上清洗墙面1,当刷杆14移动到链条16的第一个拐角处时,此时刷杆14位于连接轴12的最上方;
S23、链条16继续转动,刷杆14在链条16的带动下向右移动,带动滑座11、连接轴12、上墙刷13、下墙刷15在墙刷架10内向右同步移动,下墙刷15向右清洗墙面1,当刷杆14移动到链条16的第二个拐角处时,滑座11停止滑动;
S24、链条16继续转动,刷杆14在链条16的带动下向下移动,上墙刷13拉伸并向下清洗墙面1,下墙刷15压缩,下墙刷15上的污渍排进清洗水槽21,污水随槽内流水从排污口20排出,当刷杆14移动到链条16的第三个拐角处时,此时刷杆14位于连接轴12的最下方;
S25、链条16继续转动,刷杆14在链条16的带动下向左移动,带动滑座11、连接轴12、上墙刷13、下墙刷15在墙刷架10内向左同步移动,上墙刷13向左清洗墙面1,当刷杆14移动到链条16的第四个拐角处后,滑座11停止滑动,刷杆14在链条16的带动下向上移动,当刷杆14移动至连接轴12的中间位置时,上墙刷13、下墙刷15恢复原状;
S26、重复步骤S22-S25,直至该清洗区域的墙面1清洗干净。
实施例3:
基本内容等同于实施例1,不同之处在于:
参见图8至图9,所述清洗模块包括激光清洗架22、滑杆23、激光头24,所述激光清洗架22连接于所述厢体5的内侧壁,所述滑杆23横向布置于所述激光清洗架22内且沿竖直方向滑动连接于所述激光清洗架22,所述激光头24套设于所述滑杆23且滑动连接于所述滑杆23。
参见图12,所述步骤S4中,当控制模块判断清洗区域存在污渍时,控制模块将控制指令发送给动力模块,动力模块控制滑杆23和激光头24移动至污渍处,激光头24发射激光将该污渍进行去除,然后控制模块将控制指令发送给运动模块,运动模块控制厢体5向上移动一段距离并固定,然后重复步骤S2-S4直至墙面1清洗完毕。