基于轨旁电网线杆计数的列车定位系统及方法
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及图像数据处理技术领域,特别涉及一种基于轨旁电网线杆计数的列车定位系统及方法。
背景技术
目前,列车运行时,为便于对列车之间的调度、协调等工作的开展,需要对运行列车进行持续列车定位。
现有的列车定位方法,如申请号为201911057378.4的中国专利,公开了一种基于轨旁电网线杆计数的列车定位方法,包括:针对轨旁电网线杆,采用基于卷积神经网络的视觉几何组神经网络分类器算法训练出分类器;通过安装在列车车头中部的高速摄像机采集列车的运行视频;采用图像识别算法识别出所述运行视频的轨道线和消失点;根据所述训练好的分类器,识别出所述消失点右侧的电网线杆,并采用电网线杆计数算法记录当前识别到的电网线杆的总数量;根据当前电网线杆的总数量确定列车的当前位置。这一列车定位方法是控制安装在列车车头中部的高速摄像机持续地拍摄列车的运行视频,从运行视频中识别出电网线杆并进行计数,根据计数结果查库进行列车位置的确定。
但是,这一列车定位方法在具体实施时,需要高速摄像机持续进行拍摄工作,不间断地采集列车视频,这样做会出现两个问题:一是造成功耗浪费,运行视频中对于电网线杆计数有价值的仅是其中包含电网线杆的图像帧,其余图像帧采集过来没有用处;二是影响高速摄像机的使用寿命,列车一般的持续运行时间较长,高速摄像机若持续进行拍摄工作,一定会导致其使用寿命的减短,从而缩短了高速摄像机的维保周期,增加人力、物力成本,更增加了列车半路上高速摄像机宕机导致定位失败的可能性。
因此,有必要提出一种新的基于轨旁电网线杆计数的列车定位系统及方法,以至少部分地解决现有技术中存在的问题。
发明内容
本发明目的之一在于提供了一种基于轨旁电网线杆计数的列车定位系统,仅控制高速摄像机进行包含电网线杆的图像即有价值的图像的采集,避免造成功耗浪费,另外,避免了高速摄像机若持续进行拍摄工作导致其使用寿命的减短、维保周期的缩短和人力、物力成本增加等问题的产生,更降低了列车半路上高速摄像机宕机导致定位失败的可能性。
本发明实施例提供的一种基于轨旁电网线杆计数的列车定位系统,包括:
位置获取模块,用于获取上一次定位列车的第一位置;
线杆位置及局部轨道确定模块,用于从预设的轨道地图上确定所述第一位置的下一个轨旁电网线杆的线杆位置以及所述线杆位置与所述第一位置之间的局部轨道;所述列车沿所述局部轨道行驶结束时,所述列车的车尾刚好路过所述线杆位置;
车速曲线预测模块,用于预测所述列车未来沿所述局部轨道行驶时的车速曲线;
拍摄时机确定模块,用于基于所述车速曲线、所述局部轨道和所述线杆位置,确定拍摄时机;
轨道图像获取模块,用于获取所述列车的定位空白时长,当所述定位空白时长从非拍摄时机进入所述拍摄时机,则获取所述列车的车头前方的轨道图像;
列车定位模块,用于基于所述轨道图像,通过接力进行轨旁电网线杆计数,并基于接力计数结果重新定位所述列车的当前的第二位置。
优选的,车速曲线预测模块预测所述列车未来沿所述局部轨道行驶时的车速曲线,执行如下操作:
基于预设的特征提取模板,从所述预设的轨道地图上提取所述局部轨道的轨道特征;
基于预设的轨道搜索条件生成模板,根据所述轨道特征,生成轨道搜索条件;
从所述预设的轨道地图上搜索符合所述轨道搜索条件的其他局部轨道;
将所述局部轨道和所述其他局部轨道合并作为目标局部轨道;
获取历史上其他列车即将开始沿所述目标局部轨道行驶时的历史列车工况以及所述其他列车沿所述目标局部轨道行驶时的历史车速曲线;所述历史列车工况和所述历史车速曲线一一对应;
获取所述列车当前的列车工况;
将所述列车工况与任一所述历史列车工况进行比对,获取比对情况;
基于所述比对情况和预设的历史列车工况评价库,确定所述历史列车工况的评价值;
将最大所述评价值的所述历史列车工况对应的所述历史车速曲线作为目标历史车速曲线;
基于确定最大所述评价值时基于的所述比对情况和预设的历史车速曲线修正系数库,确定历史车速曲线修正系数;
基于所述历史车速曲线修正系数,对所述目标历史车速曲线进行曲线修正,获得所述车速曲线。
优选的,拍摄时机确定模块基于车速曲线、所述局部轨道和线杆位置,确定拍摄时机,执行如下操作:
基于车速曲线,模拟列车沿局部轨道开始行驶;
持续获取列车被模拟行驶时的车头位置和车头正对方向;
基于车头位置和车头正对方向,构建第一方向向量;
基于车头位置和由车头位置向线杆位置的直线方向,构建第二方向向量;
第一方向向量和第二方向向量之间的向量夹角,计算公式为:
获取车头位置与线杆位置之间的直线距离;
当直线距离与向量夹角满足触发条件时,立刻停止模拟列车沿局部轨道行驶,并获取列车被模拟行驶的行驶总时长;
基于预设的拍摄时机生成模板,根据行驶总时长,生成拍摄时机;
其中,触发条件包括:
直线距离落在预设的直线距离区间内且直线距离与直线距离区间的左边界值的第一差值小于或等于预设的第一差值阈值;
向量夹角落在预设的向量夹角区间内且向量夹角与向量夹角区间的左边界值的第二差值小于或等于预设的第二差值阈值;
第一差值和第二差值之间满足关系式:
优选的,列车定位模块基于轨道图像,通过接力进行轨旁电网线杆计数,执行如下操作:
获取所述轨道图像的拍摄参数;所述拍摄参数包括:拍摄距离和拍摄角度;
从预设的轨旁电网线杆轮廓提取模板库中确定所述拍摄参数对应的轨旁电网线杆轮廓提取模板;
基于所述轨旁电网线杆轮廓提取模板,从所述轨道图像中提取轨旁电网线杆轮廓;
当提取成功时,获取上一次进行轨旁电网线杆计数的计数结果;
将所述计数结果加一后作为接力计数结果。
优选的,列车定位模块基于接力计数结果重新定位列车的当前的第二位置,执行如下操作:
从预设的列车定位库中确定接力计数结果对应的列车定位位置,作为第二位置。
本发明实施例提供的一种基于轨旁电网线杆计数的列车定位方法,其特征在于,包括:
步骤S1:获取上一次定位列车的第一位置;
步骤S2:从预设的轨道地图上确定所述第一位置的下一个轨旁电网线杆的线杆位置以及所述线杆位置与所述第一位置之间的局部轨道;所述列车沿所述局部轨道行驶结束时,所述列车的车尾刚好路过所述线杆位置;
步骤S3:预测所述列车未来沿所述局部轨道行驶时的车速曲线;
步骤S4:基于所述车速曲线、所述局部轨道和所述线杆位置,确定拍摄时机;
步骤S5:获取所述列车的定位空白时长,当所述定位空白时长从非拍摄时机进入所述拍摄时机,则获取所述列车的车头前方的轨道图像;
步骤S6:基于所述轨道图像,通过接力进行轨旁电网线杆计数,并基于接力计数结果重新定位所述列车的当前的第二位置。
优选的,步骤S3:预测所述列车未来沿所述局部轨道行驶时的车速曲线,包括:
基于预设的特征提取模板,从所述预设的轨道地图上提取所述局部轨道的轨道特征;
基于预设的轨道搜索条件生成模板,根据所述轨道特征,生成轨道搜索条件;
从所述预设的轨道地图上搜索符合所述轨道搜索条件的其他局部轨道;
将所述局部轨道和所述其他局部轨道合并作为目标局部轨道;
获取历史上其他列车即将开始沿所述目标局部轨道行驶时的历史列车工况以及所述其他列车沿所述目标局部轨道行驶时的历史车速曲线;所述历史列车工况和所述历史车速曲线一一对应;
获取所述列车当前的列车工况;
将所述列车工况与任一所述历史列车工况进行比对,获取比对情况;
基于所述比对情况和预设的历史列车工况评价库,确定所述历史列车工况的评价值;
将最大所述评价值的所述历史列车工况对应的所述历史车速曲线作为目标历史车速曲线;
基于确定最大所述评价值时基于的所述比对情况和预设的历史车速曲线修正系数库,确定历史车速曲线修正系数;
基于所述历史车速曲线修正系数,对所述目标历史车速曲线进行曲线修正,获得所述车速曲线。
优选的,步骤S4:基于所述车速曲线、所述局部轨道和所述线杆位置,确定拍摄时机,包括:
基于所述车速曲线,模拟所述列车沿所述局部轨道开始行驶;
持续获取所述列车被模拟行驶时的车头位置和车头正对方向;
基于所述车头位置和所述车头正对方向,构建第一方向向量;
基于所述车头位置和由所述车头位置向所述线杆位置的直线方向,构建第二方向向量;
计算所述第一方向向量与所述第二方向向量之间的向量夹角,计算公式为:
获取所述车头位置与所述线杆位置之间的直线距离;
当所述直线距离与所述向量夹角满足触发条件时,立刻停止模拟所述列车沿所述局部轨道行驶,并获取所述列车被模拟行驶的行驶总时长;
基于预设的拍摄时机生成模板,根据所述行驶总时长,生成所述拍摄时机;
其中,所述触发条件包括:
所述直线距离落在预设的直线距离区间内且所述直线距离与所述直线距离区间的左边界值的第一差值小于或等于预设的第一差值阈值;
所述向量夹角落在预设的向量夹角区间内且所述向量夹角与所述向量夹角区间的左边界值的第二差值小于或等于预设的第二差值阈值;
所述第一差值和所述第二差值之间满足关系式:
优选的,步骤S6中,基于所述轨道图像,通过接力进行轨旁电网线杆计数,包括:
获取所述轨道图像的拍摄参数;所述拍摄参数包括:拍摄距离和拍摄角度;
从预设的轨旁电网线杆轮廓提取模板库中确定所述拍摄参数对应的轨旁电网线杆轮廓提取模板;
基于所述轨旁电网线杆轮廓提取模板,从所述轨道图像中提取轨旁电网线杆轮廓;
当提取成功时,获取上一次进行轨旁电网线杆计数的计数结果;
将所述计数结果加一后作为接力计数结果。
优选的,步骤S6中,基于接力计数结果重新定位所述列车的当前的第二位置,包括:
从预设的列车定位库中确定所述接力计数结果对应的列车定位位置,作为所述第二位置。
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
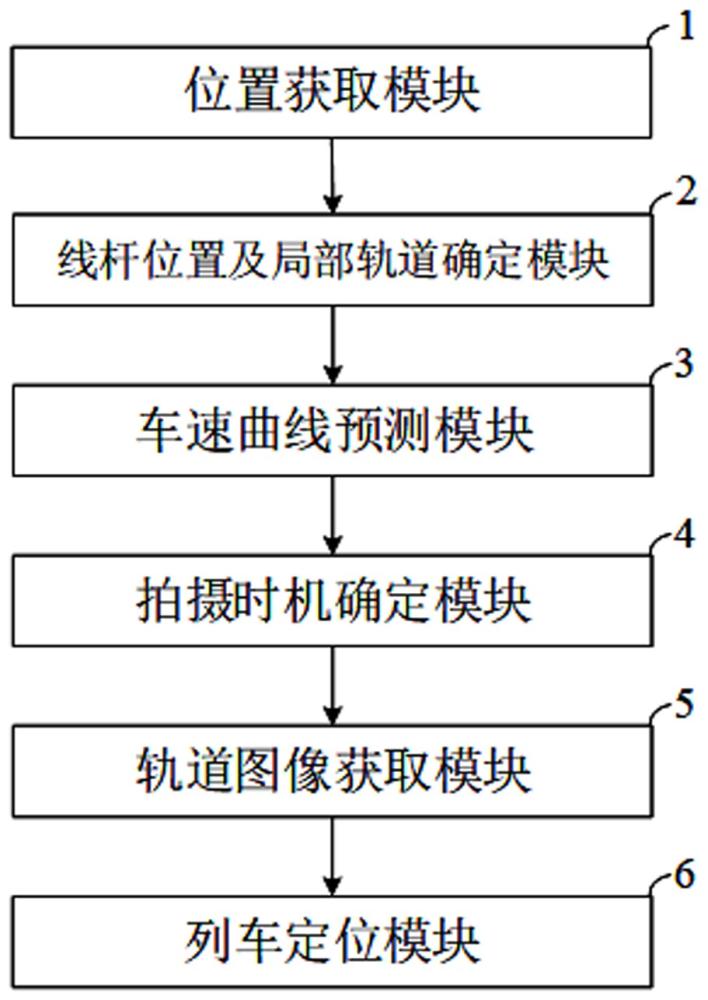
图1为本发明实施例中一种基于轨旁电网线杆计数的列车定位系统的示意图;
图2为本发明实施例中一种基于轨旁电网线杆计数的列车定位方法的示意图。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
本发明实施例提供了一种基于轨旁电网线杆计数的列车定位系统,如图1所示,包括:
位置获取模块1,用于获取上一次定位列车的第一位置;其中,第一位置为上一次基于轨旁电网线杆计数确定的列车位置;
线杆位置及局部轨道确定模块2,用于从预设的轨道地图上确定第一位置的下一个轨旁电网线杆的线杆位置以及线杆位置与第一位置之间的局部轨道;列车沿局部轨道行驶结束时,列车的车尾刚好路过线杆位置(即列车沿局部轨道一行驶结束后车尾就刚好路过线杆位置);其中,轨道地图为当中有列车轨道、列车轨道旁的轨旁电网线杆等的地图;
车速曲线预测模块3,用于预测列车未来沿局部轨道行驶时的车速曲线;其中,车速曲线的横轴为时间,纵轴为速度;
拍摄时机确定模块4,用于基于车速曲线、局部轨道和线杆位置,确定拍摄时机;其中,拍摄时机为一个时长值,该时长值代表了从上一次基于轨旁电网线杆计数确定列车位置之后多长时间进行车头前方图像的采集适宜;
轨道图像获取模块5,用于获取列车的定位空白时长,当定位空白时长从非拍摄时机进入拍摄时机,则获取列车的车头前方的轨道图像(即定位空白时长一进入拍摄时机,则获取列车的车头前方的轨道图像);其中,定位空白时长为上一次基于轨旁电网线杆计数确定列车位置的时刻与当前时刻之间的时间差值;轨道图像可通过设置于列车车头上的高速摄像机进行拍摄获取;
列车定位模块6,用于基于轨道图像,通过接力进行轨旁电网线杆计数,并基于接力计数结果重新定位列车当前的第二位置。
上述技术方案的工作原理及有益效果为:
一次基于轨旁电网线杆计数定位列车的第一位置后,确定多久之后再获取列车的车头前方的轨道图像适宜即确定拍摄时机,一进入拍摄时机时,就通过设置于列车车头上的高速摄像机获取轨道图像,再基于轨道图像进行轨旁电网线杆计数并重新定位,以此循环。基于车速曲线、局部轨道和线杆位置,确定拍摄时机,保证在拍摄时机下进行拍摄的轨道图像可以包含下一个轨旁电网线杆。本申请仅控制高速摄像机进行包含电网线杆的图像即有价值的图像的采集,避免造成功耗浪费,另外,避免了高速摄像机若持续进行拍摄工作导致其使用寿命的减短、维保周期的缩短和人力、物力成本增加等问题的产生,更降低了列车半路上高速摄像机宕机导致定位失败的可能性。
在一个实施例中,车速曲线预测模块3预测列车未来沿局部轨道行驶的车速曲线,执行如下操作:
基于预设的特征提取模板,从预设的轨道地图上提取局部轨道的轨道特征;其中,轨道特征包括:轨道长度、轨道曲线半径等;特征提取模板为限定特征提取过程是提取这类轨道特征而预先设置的模板;
基于预设的轨道搜索条件生成模板,根据轨道特征,生成轨道搜索条件;其中,轨道搜索条件生成模板为对照着可根据轨道特征生成轨道搜索条件的模板,例如:轨道特征为轨道长度为20米,则生成的轨道搜索条件为搜索出的其他局部轨道的轨道长度为20米;
从轨道地图上搜索符合轨道搜索条件的其他局部轨道;
将局部轨道和其他局部轨道合并作为目标局部轨道;
获取历史上其他列车即将开始沿目标局部轨道行驶时的历史列车工况以及其他列车沿目标局部轨道行驶时的历史车速曲线;历史列车工况和历史车速曲线一一对应;其中,历史列车工况包括:车速、载重量、环境温湿度等;历史车速曲线横轴为时间,纵轴为速度;
获取列车当前的列车工况;其中,列车工况包括:车速、载重量、环境温湿度等;
将列车工况与任一历史列车工况进行比对,获取比对情况;其中,比对情况包括:列车工况差别,例如:列车当前车速与其他列车历史车速之间的差值、列车当前载重量与其他列车历史载重量之间的差值等;
基于比对情况和预设的历史列车工况评价库,确定历史列车工况的评价值;其中,历史列车工况评价库中有不同比对情况对应的评价值,评价值越大,说明历史列车工况对应的历史车速曲线越具备参考价值(列车进入轨道前的工况越近似,在轨道行驶的速度曲线一定越近似);一般的,比对情况中的列车当前车速与其他列车历史车速之间的差值越小、列车当前载重量与其他列车历史载重量之间的差值越小等时,评价值越大;
将最大评价值的历史列车工况对应的历史车速曲线作为目标历史车速曲线;
基于确定最大评价值时基于的比对情况和预设的历史车速曲线修正系数库,确定历史车速曲线修正系数;其中,历史车速曲线修正系数库中有不同比对情况对应的历史车速曲线修正系数,一般的,比对情况中的列车当前车速越大于其他列车历史车速(起始车速大,说明未来行驶车速相对也会大)、列车当前载重量越小于其他列车历史载重量(载重量小,说明未来行驶车速相对也会大)等时,历史车速曲线修正系数越大;
基于历史车速曲线修正系数,对目标历史车速曲线进行曲线修正,获得车速曲线。进行曲线修正时,将目标历史车速曲线上的各纵坐标都与历史车速曲线修正系数相乘,将相乘结果作为新的纵坐标。
上述技术方案的工作原理及有益效果为:
预测列车未来沿局部轨道行驶的车速曲线时,参考其他列车的历史车速曲线,当然,若列车历史上也沿局部轨道行驶过,产生的历史车速曲线也可以进行参考,即其他列车中也会包含当前列车,提升了车速曲线预测的全面性。另外,引入轨道搜索条件,拓宽了用于参考的其他列车的历史车速曲线的获取维度即丰富了预测参考依据,进一步提升了车速曲线预测的全面性。其次,引入比对情况、历史列车工况评价和历史车速曲线修正系数库,快速确定最具有参考价值即评价值最大的目标历史车速曲线并快速进行曲线修正,极大程度上提升了车速曲线预测的精准性和预测效率,间接提升了后续进行拍摄时机确定的精准性。
在一个实施例中,拍摄时机确定模块4基于车速曲线、局部轨道和线杆位置,确定拍摄时机,执行如下操作:
基于车速曲线,模拟列车沿局部轨道开始行驶;其中,模拟时,对照车速曲线在什么时间下赋予列车多大车速;模拟可基于汽车仿真软件比如ADVISOR(Advanced VehIcleSimulatOR,高级车辆仿真器)等实现;
持续获取列车被模拟行驶时的车头位置和车头正对方向;
基于车头位置和车头正对方向,构建第一方向向量;
基于车头位置和由车头位置向线杆位置的直线方向,构建第二方向向量;
计算第一方向向量与第二方向向量之间的向量夹角,计算公式为:
获取车头位置与线杆位置之间的直线距离;
当直线距离与向量夹角满足触发条件时,立刻停止模拟列车沿局部轨道行驶,并获取列车被模拟行驶的行驶总时长;
基于预设的拍摄时机生成模板,根据行驶总时长,生成拍摄时机;其中,拍摄时机生成模板为对照着可根据行驶总时长生成拍摄时机的模板,例如:行驶总时长为0.3秒,则生成的拍摄时机为列车的定位空白时长达到0.3秒时进入拍摄时机;
其中,触发条件包括:
直线距离落在预设的直线距离区间内且直线距离与直线距离区间的左边界值的第一差值小于或等于预设的第一差值阈值;其中,满足这一条件时,可使得车头足够靠近下一个轨旁电网线杆时再拍摄轨道图像,成像更清晰(一般的,直线距离越短,车头越靠近下一个轨旁电网线杆,因此,直线距离越接近直线距离区间的左边界值,成像越清晰),有助于后续从轨道图像中识别出下一个轨旁电网线杆;
向量夹角落在预设的向量夹角区间内且向量夹角与向量夹角区间的左边界值的第二差值小于或等于预设的第二差值阈值;其中,满足这一条件时,可使得车头越正对着下一个轨旁电网线杆时再拍摄轨道图像,拍摄角度更佳(一般的,当车头正对着下一个轨旁电网线杆时,向量夹角为0,因此,向量夹角越接近向量夹角区间的左边界值,拍摄角度越佳),成像中包含下一个轨旁电网线杆的面积越多(图像成像是一个平面图,比如若是对轨旁电网线杆侧拍,轨旁电网线杆在成像图像中的所占面积较小,正对着拍摄则所占面积较大),有助于后续从轨道图像中识别出下一个轨旁电网线杆;
第一差值和第二差值之间满足关系式:
上述技术方案的工作原理及有益效果为:
基于车速曲线、局部轨道和线杆位置,确定拍摄时机时,引入触发条件,极大程度上保证了拍摄时机确定的适宜性、精准性和确定效率。
在一个实施例中,列车定位模块6基于轨道图像,通过接力进行轨旁电网线杆计数,执行如下操作:
获取所述轨道图像的拍摄参数;所述拍摄参数包括:拍摄距离和拍摄角度;其中,拍摄距离为高速摄像机拍摄轨道图像时高速摄像机与下一个轨旁电网线杆之间的距离(该参数可以上述实施例中的拍摄时机下的车头位置与线杆位置之间的直线距离计);拍摄角度为高速摄像机拍摄轨道图像时高速摄像机与下一个轨旁电网线杆之间的所呈角度(该参数可以上述实施例中的拍摄时机下的第一方向向量与第二方向向量之间的向量夹角计);
从预设的轨旁电网线杆轮廓提取模板库中确定所述拍摄参数对应的轨旁电网线杆轮廓提取模板;其中,轨旁电网线杆轮廓提取模板中有不同拍摄参数对应的从轨道图像中提取轨旁电网线杆轮廓的模板,该模板中有在对应拍摄参数下拍摄轨旁电网线杆成像后图像中的轨旁电网线杆轮廓(由于轨道图像是一平面图,拍摄距离不同、拍摄角度不同,成像后的图像中的轨旁电网线杆轮廓也是不同的);
基于所述轨旁电网线杆轮廓提取模板,尝试从所述轨道图像中提取轨旁电网线杆轮廓;
当尝试提取成功时,获取上一次进行轨旁电网线杆计数的计数结果;
将所述计数结果加一后作为接力计数结果。比如:上一次进行轨旁电网线杆计数的计数结果为100,则接力计数结果为100+1=101。
上述技术方案的工作原理及有益效果为:
识别轨道图像中是否有下一个轨旁电网线杆时,引入轨旁电网线杆轮廓提取模板,针对性地尝试从轨道图像中提取轨旁电网线杆轮廓,极大程度上提升了识别轨道图像中是否有下一个轨旁电网线杆的识别效率。
在一个实施例中,列车定位模块6基于接力计数结果重新定位列车的当前的第二位置,执行如下操作:
从预设的列车定位库中确定接力计数结果对应的列车定位位置,并作为第二位置。
上述技术方案的工作原理及有益效果为:
列车定位库中有不同接力计数结果对应的列车定位位置,由工作人员提前预设,查库即可基于接力计数结果重新定位列车当前的第二位置。提升了定位列车当前的第二位置的定位效率。
本发明实施例提供了一种基于轨旁电网线杆计数的列车定位方法,如图2所示,包括:
步骤S1:获取上一次定位列车的第一位置;
步骤S2:从预设的轨道地图上确定所述第一位置的下一个轨旁电网线杆的线杆位置以及所述线杆位置与所述第一位置之间的局部轨道;所述列车沿所述局部轨道行驶结束时,所述列车的车尾刚好路过所述线杆位置;
步骤S3:预测所述列车未来沿所述局部轨道行驶时的车速曲线;
步骤S4:基于所述车速曲线、所述局部轨道和所述线杆位置,确定拍摄时机;
步骤S5:获取所述列车的定位空白时长,当所述定位空白时长从非拍摄时机进入所述拍摄时机,则获取所述列车的车头前方的轨道图像;
步骤S6:基于所述轨道图像,通过接力进行轨旁电网线杆计数,并基于接力计数结果重新定位所述列车的当前的第二位置。
在一个实施例中,步骤S3:预测列车未来沿局部轨道行驶时的车速曲线,包括:
基于预设的特征提取模板,从预设的轨道地图上提取局部轨道的轨道特征;
基于预设的轨道搜索条件生成模板,根据轨道特征,生成轨道搜索条件;
从预设的轨道地图上搜索符合轨道搜索条件的其他局部轨道;
将局部轨道和其他局部轨道合并作为目标局部轨道;
获取历史上其他列车即将开始沿目标局部轨道行驶时的历史列车工况以及其他列车沿目标局部轨道行驶时的历史车速曲线;历史列车工况和历史车速曲线一一对应;
获取列车当前的列车工况;
将列车工况与任一历史列车工况进行比对,获取比对情况;
基于比对情况和预设的历史列车工况评价库,确定历史列车工况的评价值;
将最大评价值的历史列车工况对应的历史车速曲线作为目标历史车速曲线;
基于确定最大评价值时基于的比对情况和预设的历史车速曲线修正系数库,确定历史车速曲线修正系数;
基于历史车速曲线修正系数,对目标历史车速曲线进行曲线修正,获得车速曲线。
在一个实施例中,步骤S4:基于车速曲线、局部轨道和线杆位置,确定拍摄时机,包括:
基于车速曲线,模拟列车沿局部轨道开始行驶;
持续获取列车被模拟行驶时的车头位置和车头正对方向;
基于车头位置和车头正对方向,构建第一方向向量;
基于车头位置和由车头位置向线杆位置的直线方向,构建第二方向向量;
计算第一方向向量与第二方向向量之间的向量夹角,计算公式为:
获取车头位置与线杆位置之间的直线距离;
当直线距离与向量夹角满足触发条件时,立刻停止模拟列车沿局部轨道行驶,并获取列车被模拟行驶的行驶总时长;
基于预设的拍摄时机生成模板,根据行驶总时长,生成拍摄时机;
其中,触发条件包括:
直线距离落在预设的直线距离区间内且直线距离与直线距离区间的左边界值的第一差值小于或等于预设的第一差值阈值;
向量夹角落在预设的向量夹角区间内且向量夹角与向量夹角区间的左边界值的第二差值小于或等于预设的第二差值阈值;
第一差值和第二差值之间满足关系式:
在一个实施例中,步骤S6中,基于轨道图像,通过接力进行轨旁电网线杆计数,包括:
获取所述轨道图像的拍摄参数;所述拍摄参数包括:拍摄距离和拍摄角度;
从预设的轨旁电网线杆轮廓提取模板库中确定所述拍摄参数对应的轨旁电网线杆轮廓提取模板;
基于所述轨旁电网线杆轮廓提取模板,尝试从所述轨道图像中提取轨旁电网线杆轮廓;
当尝试提取成功时,获取上一次进行轨旁电网线杆计数的计数结果;
将所述计数结果加一后作为接力计数结果。
在一个实施例中,步骤S6中,基于接力计数结果重新定位列车当前的第二位置,包括:
从预设的列车定位库中确定接力计数结果对应的列车定位位置,并作为第二位置。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。