检查系统及其安装方法
文献发布时间:2023-06-19 19:38:38
技术领域
本申请涉及安全检查领域,尤其涉及检查系统及其安装方法。
背景技术
快速检查设备(也简称为快检设备)是被设计用于对货物、车辆等进行快速安全检查的设备。快速检查设备可用于港口、海关等大宗货物运输不停车情况下的快速检查,可提供基于物质组成信息的高分辨率的扫描图像,以便于检查人员能够有效快速地在不停车、不开箱情况下检查出藏匿于货物、车辆等中的走私物品和各类违禁物品。
发明内容
根据本申请的一方面,提供了一种检查系统,包括:第一成像系统,该第一成像系统包括:第一舱体,第一舱体包括第一射线扫描组件;以及平台组件,平台组件为一体式n型平台,该一体式n型平台具有平台结构和位于平台结构两侧的第一竖臂结构和第二竖臂结构,第一舱体附接于平台结构上,第一探测器组件被设置在平台组件中;以及第二成像系统,该第二成像系统包括:第二舱体,第二舱体包括第二射线扫描组件;上臂架,上臂架为一体式n型臂架,该一体式n型臂架具有横臂结构和位于横臂结构两侧的第三竖臂结构和第四竖臂结构,其中第三竖臂结构与第二舱体附接;以及竖臂架,其中述竖臂架的上端与第四竖臂结构附接,并且其中第二探测器组件被设置在以下组件中的至少一者中:第二舱体的侧部、上臂架和竖臂架,其中第一竖臂结构的下端附接到第二舱体。
在一些实现方式中,第一成像系统还包括第一立柱组件和第二立柱组件,第一立柱组件的上端与第一竖臂结构附接,第二立柱组件的上端与第二竖臂结构附接,第一立柱组件的下端附接到第二舱体。
在一些实现方式中,第一立柱组件的下端附接到第二舱体的功能扩展接口处。
在一些实现方式中,平台组件的第一竖臂结构附接到第二舱体的功能扩展接口处。
在一些实现方式中,第一立柱组件包括电气组件,以通过功能扩展接口实现与第二舱体的彼此电气通信。
在一些实现方式中,平台组件的第一竖臂结构包括电气组件,以通过功能扩展接口实现与第二舱体的彼此电气通信。
在一些实现方式中,竖臂架的下端和第二立柱组件的下端分别通过底部定位座而与地面保持一定距离。
在一些实现方式中,底部定位座是可伸缩的,以用于调节竖臂架和第二立柱组件的水平度。
在一些实现方式中,底部定位座包括至少两个支撑件,每个支撑件能独立地伸缩。
在一些实现方式中,第二舱体和竖臂架中的至少一者设置有水平测量装置,以用于调节第二舱体和竖臂架中的至少一者的水平度。
在一些实现方式中,第三竖臂结构与第二舱体通过以下方式中的一者而附接:法兰、滑座结构或旋转结构。
在一些实现方式中,第四竖臂结构与竖臂架的上端通过法兰或折叠件而附接。
在一些实现方式中,第一舱体、平台组件以及第一立柱组件和第二立柱组件的每一者包括电气组件,以用于实现彼此电气通信。
在一些实现方式中,第二舱体、上臂架和竖臂架中的每一者包括电气组件,以用于实现彼此电气通信。
在一些实现方式中,扫描系统还包括第三成像系统,第三成像系统包括第三舱体,第三舱体包括第三射线扫描组件和第三探测器组件,第三舱体被附接到第二舱体或竖臂架。
根据本申请的一方面,提供了一种检查系统的安装方法,其特征在于包括:提供第一舱体和平台组件,第一舱体包括第一射线扫描组件,平台组件为一体式n型平台,该一体式n型平台具有平台结构和位于平台结构两侧的第一竖臂结构和第二竖臂结构,第一舱体附接于平台结构上,第一探测器组件被设置在平台组件中;提供第二舱体,第二舱体包括第二射线扫描组件;提供上臂架和竖臂架,上臂架为一体式n型臂架,该一体式n型臂架具有横臂结构和位于横臂结构两侧的第三竖臂结构和第四竖臂结构,第二探测器组件被设置在以下组件中的至少一者中:第二舱体的侧部、上臂架和竖臂架;将第三竖臂结构与第二舱体附接;将第四竖臂结构与竖臂架的上端附接;以及将第一竖臂结构的下端附接到第二舱体。
在一些实现方式中,该检查系统的安装方法还包括:提供第一立柱组件和第二立柱组件,将第一立柱组件的上端与第一竖臂结构附接,将第二立柱组件的上端与第二竖臂结构附接,将第一立柱组件的下端附接到第二舱体。
在一些实现方式中,该检查系统的安装方法还包括:将第一立柱组件的下端附接到第二舱体的功能扩展接口处。
在一些实现方式中,该检查系统的安装方法还包括:将平台组件的第一竖臂结构附接到第二舱体的功能扩展接口处。
在一些实现方式中,第一立柱组件包括电气组件,以通过功能扩展接口实现与第二舱体的彼此电气通信。
在一些实现方式中,平台组件的第一竖臂结构包括电气组件,以通过功能扩展接口实现与第二舱体的彼此电气通信。
在一些实现方式中,该检查系统的安装方法还包括:将竖臂架的下端和第二立柱组件的下端分别通过底部定位座而与地面保持一定距离。
在一些实现方式中,底部定位座是可伸缩的,该检查系统的安装方法还包括:调节底部定位座以调节竖臂架和第二立柱组件的水平度。
在一些实现方式中,底部定位座包括至少两个支撑件,每个支撑件能独立地伸缩。
在一些实现方式中,第二舱体和竖臂架中的至少一者设置有水平测量装置,该检查系统的安装方法还包括:利用水平测量装置调节第二舱体和竖臂架中的至少一者的水平度。
在一些实现方式中,该检查系统的安装方法还包括:将第三竖臂结构与第二舱体通过以下方式中的一者而附接:法兰、滑座结构或旋转结构。
在一些实现方式中,该检查系统的安装方法还包括:将第四竖臂结构与竖臂架的上端通过法兰或折叠件而附接。
在一些实现方式中,第一舱体、平台组件以及第一立柱组件和第二立柱组件的每一者包括电气组件,以用于实现彼此电气通信。
在一些实现方式中,第二舱体、上臂架和竖臂架中的每一者包括电气组件,以用于实现彼此电气通信。
在一些实现方式中,该检查系统的安装方法还包括:提供第三舱体,第三舱体包括第三射线扫描组件和第三探测器组件,以及将第三舱体附接到第一舱体或竖臂架。
根据本申请实施例提供的检查系统及其安装方法,采用双源双视角成像技术,其中第一成像系统用于从垂直方向扫描成像,第二成像系统用于从水平方向扫描成像,提高了物质识别能力并从而减小了漏检的可能。此外,每个成像系统各自采用了较少的部件数量,利于转场和安装调试,并且在安装调试时无需重新调整探测器的束流面和射线扫描组件的束流面即能实现共面,从而便于现场的快速部署。
附图说明
通过参考附图会更加清楚地理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,在附图中:
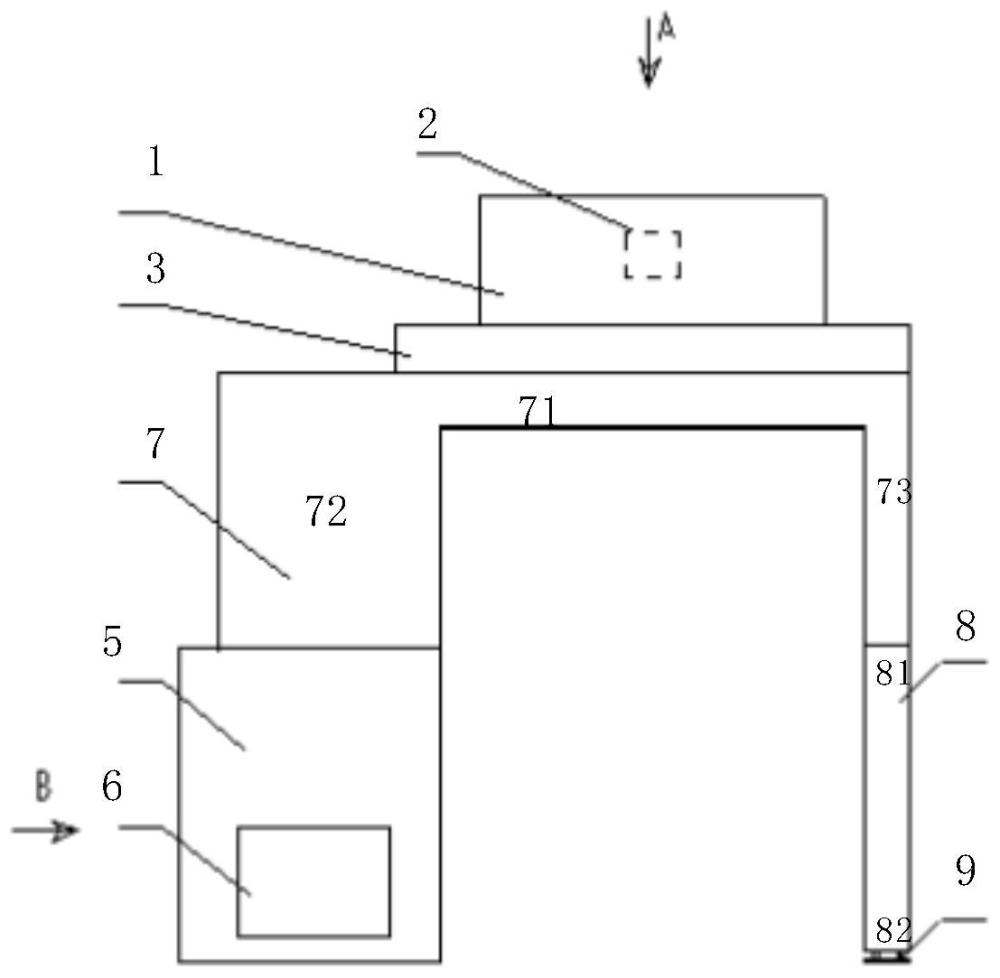
图1示出根据本申请实施例的检查系统的主视图;
图2示出图1所示的检查系统沿A方向的顶视图;
图3示出图1所示的检查系统沿B方向的侧视图;
图4示出根据本申请实施例的第一成像系统的示意图;
图5示出根据本申请实施例的第一成像系统的平台组件的示意图;
图6示出根据本申请实施例的第二成像系统的示意图;
图7示出根据本申请实施例的第二成像系统的第二舱体的示意图;以及
图8示出根据本申请实施例的检查系统的安装方法的流程图。
具体实施方式
传统快速检查设备的分离部件较多,横竖探测器臂与横梁立柱支撑结构、舱体、射线发生器等均为分体安装,各部件间有富裕的调节量,整体结构比较复杂。设备从生产厂的初装到场地安调再到客户现场最终交付,每一次转场均需要重新安调,施工比较繁琐。
此外,由于要满足快速检查要求,传统快速检查设备一般采用单源单视角成像技术,这种成像技术具备一定的物质识别能力,但对不同被检物体的层叠位置判断信息不足,不容易检查到层叠于隐藏于物体背后的物品,存在漏检可能。
鉴于此,本申请提供了一种结构相对简单,易于转场和安装调试并便于现场快速部署的检查系统及其安装方法。此外,根据本申请实施例的检查系统及其安装方法还应用了双源双视角成像技术,能够同时获取水平和垂直两个扫描方向的用于图像生成的信号信息,从而提高工作效率并降低漏检率。
下面参考图1-图8来描述根据本申请实施例提供的检查系统及其安装方法。
首先参考图1-图7来说明根据本申请实施例的检查系统,其中,图1示出根据本申请实施例的检查系统的主视图;图2是示出图1所示的检查系统沿A方向的顶视图;图3示出图1所示的检查系统沿B方向的侧视图;图4示出根据本申请实施例的第一成像系统的示意图;图5示出根据本申请实施例的第一成像系统的平台组件的示意图;图6示出根据本申请实施例的第二成像系统的示意图;以及图7示出根据本申请实施例的第二成像系统的第二舱体的示意图。
首先参考图1-图3,根据本申请实施例的检查系统包括:第一成像系统和第二成像系统。
第一成像系统包括:第一舱体1,该第一舱体1包括第一射线扫描组件2;平台组件3,该平台组件3为一体式n型平台,该一体式n型平台具有平台结构31和位于平台结构两侧的第一竖臂结构32和第二竖臂结构33,该第一舱体1附接于平台结构31上;以及第一立柱组件41和第二立柱组件42(在附图中,第一立柱组件41和第二立柱组件42有时也被以附图标记4统一示出),第一立柱组件41的上端与平台组件3的第一竖臂结构32附接,并且第二立柱组件42的上端与第二竖臂结构33附接,其中第一探测器组件被设置在以下组件中的至少一者中:平台组件3(例如,平台结构31的底部、第一竖臂结构32和第二竖臂结构33)、第一立柱组件41和第二立柱组件42。在本文中,“附接”包括一个部件与另一个部件直接或经由其他部件连接的情况。
第二成像系统包括:第二舱体5,该第二舱体5包括第二射线扫描组件6;上臂架7,该上臂架7为一体式n型臂架,一体式n型臂架具有横臂结构71和位于横臂结构两侧的第三竖臂结构72和第四竖臂结构73,其中第三竖臂结构72与第二舱体5附接;以及竖臂架8,其中该竖臂架8的上端81与第四竖臂结构73附接,并且其中第二探测器组件被设置在以下组件中的至少一者中:第二舱体5的侧部、上臂架7和竖臂架8。在此,如本领域技术人员所理解的,设置第二探测器组件的第二舱体5的侧部是指第二舱体3面向被检物体的一侧。以下设置有探测器组件的“侧部”具有相同或相似的含义,不再赘述。
如图3所示,第一立柱组件41的下端附接到第二舱体5,即平台组件3的第一竖臂结构32经由第一立柱组件41附接到第二舱体5。
在一些实施例中,也可以省略第一立柱组件41,从而平台组件3的第一竖臂结构32直接附接到第二舱体5。在一些实施例中,也可以省略第二立柱组件42,从而平台组件3的第二竖臂结构33也与竖臂架8的上端81附接。
在一些实施例中,第一立柱组件41的下端附接到第二舱体5的功能扩展接口处。在一些实施例中,平台组件3的第一竖臂结构32附接到第二舱体5的功能扩展接口处。
在一些实施例中,第一立柱组件41包括电气组件,以通过功能扩展接口实现与第二舱体5的彼此电气通信。在一些实施例中,平台组件3的第一竖臂结构32包括电气组件,以通过功能扩展接口实现与第二舱体5的彼此电气通信。
根据本申请实施例提供的检查系统,采用双源双视角成像技术,其中第一成像系统用于从垂直方向扫描成像,第二成像系统用于从水平方向扫描成像,提高了物质识别能力并从而减小了漏检的可能。此外,每个成像系统各自采用了较少的部件数量,利于转场和安装调试,并且在安装调试时无需重新调整探测器的束流面和射线扫描组件的束流面即能实现共面,从而便于现场的快速部署。
应理解,虽然上面参考图1-图3描述了第一成像系统和第二成像系统组合使用的实施例,但是第一成像系统和第二成像系统可以单独使用。下面参考图4-7来描述第一成像系统和第二成像系统可以单独使用的情况。还应理解,不论是在组合使用的情况下描述的特征还是在单独使用的情况下描述的特征,均可以根据实际需要用在不同的使用情况和不同的实施例中,这些均在本申请的保护范围之内。
下面描述第一成像系统。图4示出根据本申请实施例的第一成像系统的示意图;以及图5示出根据本申请实施例的第一成像系统的平台组件的示意图。如图4和图5所示,在第一成像系统中,第一舱体1包括第一射线扫描组件2。射线扫描组件2包括射线源(未图示),例如电子直线加速器、电子感应加速器、X射线管(X光机)或同位素源,该射线源用于发射射线,例如X射线,以照射被检物体。在一些实施例中,第一射线扫描组件包括飞点装置,用于产生飞点对被检物体进行背散射检查。在这样的情况下,第一探测器组件(具体为背散射探测器)可以只设置在平台结构31的底部。在一些实现方式中,射线扫描组件2发出的射线束具有扇形形式,以便实现对被检物体的整个扫描。射线束被保持在一定的扇束角度内,该扇束角度可根据平台组件和立柱组件的尺寸而调整和设置。第一舱体1内有用于安装射线扫描组件2的安装组件,因此射线扫描组件2是可更换的。应理解,射线扫描组件2的配置和类型不受限制。
平台组件3为一体式n型平台,如图5所示,该一体式n型平台具有平台结构31和位于平台结构两侧的第一竖臂结构32和第二竖臂结构33,第一舱体1附接在平台结构31上,平台结构31的底部设置第一探测器组件。予以说明,本申请实施例的检查系统的各部件重达数吨,因此通平台组件采用n型结构,有利于在拆分后运输时保持为安装调试时的姿态,避免平台组件倒放运输时容易造成的变形。应理解,虽然在图中示出的平台组件的平台结构31和第一竖臂结构32以及第二竖臂结构33均为直线型,从而平台组件3为直角式n型臂架,但是在一些实施例中,平台组件的平台结构31和第一竖臂结构32以及第二竖臂结构33也可以带有弧度,从而平台组件3为弧角式n型臂架。还应理解,虽然在图中示出的平台组件的第一竖臂结构32以及第二竖臂结构33具有基本相同的长度,但是在一些实施例中,第二竖臂结构33可以被设置为较短的长度,只要能与第二立柱42或与竖臂架8的上端81附接即可,并且在此情况下,第二立柱42或竖臂架8的长度需相应调整,使得通道两侧的高度基本相当。
在使用立柱组件的情况下,第一立柱组件41的上端与平台组件3的第一竖臂结构32附接,并且第二立柱组件42的上端与第二竖臂结构33附接。当第一成像系统单独使用时,第一立柱组件41和第二立柱组件42可以具有相同的高度,从而使得第一成像系统能够稳固地置放在地面上。在第一成像系统结合第二成像系统使用时,第一立柱组件41附接到第二舱体5,此时第一立柱组件41的长度短于第二立柱组件42的长度。应理解,不论在哪种情况下,立柱组件的高度可以根据设计需求进行调整,以适合不同的检测高度的需求。
第一探测器组件被设置在平台组件中。在一些实施例中,第一探测器组件被设置平台结构31的底部、第一竖臂结构32的侧部和/或第二竖臂结构33的侧部。在使用立柱组件的情况下,第一探测器组件被设置在以下组件中的至少一者中:平台组件3、第一立柱组件41和第二立柱组件42。在平台结构31的底部布置第一探测器组件的实施例中,此探测器组件被设置在平台结构31的底部以适配并能够探测从第一舱体1的射线扫描装置2出射并经被检物体而散射出的射线束,从而尽可能获取到被检物体各个部分的信息。由此,可以实现在垂直方向上的背散射探测扫描。
在第一竖臂结构32和/或第二竖臂结构33布置第一探测器组件的实施例中,此探测器组件被设置在第一竖臂结构32的侧部和/或第二竖臂结构33的侧部以适配并能够探测从第一舱体1的射线扫描装置2出射并经被检物体而透射出的射线束,从而尽可能获取到被检物体各个部分的信息。由此,可以实现在垂直方向上的透射探测扫描。在第一立柱组件41和第二立柱组件42中的至少一者布置第一探测器组件的实施例中,此探测器组件被设置在第一立柱组件41和第二立柱组件42的侧部以适配并能够探测从第一舱体1的射线扫描装置2出射并经被检物体而透射出的射线束,从而尽可能获取到被检物体各个部分的信息。由此,也可以实现在垂直方向上的透射探测扫描。此时,优选地,可以进一步在被检物体的远离射线扫描装置2的一侧设置另外的透射探测器。
在平台组件3的平台结构31的底部以及第一竖臂结构32和/或第二竖臂结构33和/或第一立柱组件41和第二立柱组件42中都布置了第一探测组件的实施例中,可同时实现上述在垂直方向上的背散射探测扫描和在垂直方向上的透射探测扫描。
在一些实施例中,第二立柱组件42的下端可通过底部定位座而与地面保持一定距离。第二立柱组件42的下方是悬空的。底部定位座并不约第二立柱组件42的姿态,只限制风吹第二立柱组件42造成的摆动。
在一些实施例中,底部定位座可伸缩地设置在第二立柱组件42的下端,以用于调节第二立柱组件42的水平度。在一些实施例中,底部定位座5可包括至少两个支撑件,每个支撑件可独立地伸缩。支撑件的前端或者支撑件的整体可由具有弹性的材料(例如硬质橡胶弹性体)构成。由此,在支撑件接触地面时,能够根据地貌等调整第二立柱组件42及与其附接的第二臂架3的位置和姿态,保证第二立柱组件42等的触地稳定性,进一步确保探测器的束流面与射线扫描组件的束流面的共面。
在一些实施例中,第一立柱组件41的下端附接到下述的第二舱体5的功能扩展接口处。在一些实施例中,第一立柱组件41包括电气组件,以通过功能扩展接口实现与第二舱体5的彼此电气通信。
在一些实施例中,平台组件3的第一竖臂结构32与第一立柱组件41可以通过法兰而附接。在一些实施例中,平台组件3的第二竖臂结构33与第一立柱组件42可以通过法兰而附接。在一些实施例中,平台组件3的第一竖臂结构32与第一立柱组件41可以通过折叠件而附接。折叠件可包括合页结构。在一些实施例中,平台组件3的第二竖臂结构33与第一立柱组件42可以通过折叠件而附接。在利用折叠件的情况中,在转场运输时,立柱组件41和42和平台组件3无需完全拆分开,在安装时,只要把折叠件打开即可实现立柱组件41和42第平台组件3安装,从而进一步简化安装调适。
在一些实施例中,第一舱体1、平台组件3以及第一立柱组件41和第二立柱组件42的每一者包括电气组件,以用于实现彼此电气通信。
予以说明,上述的实施例中示出了使用第一立柱组件41和第二立柱组件42的情形。应理解,在未使用第一立柱组件41和第二立柱组件42的情况下,上述的底部定位座、与功能扩展接口的附接、电气组件等的描述也适用于平台组件3的第一竖臂结构32、第二竖臂结构33。
根据本申请实施例的第一成像系统采用一体式n型平台组件、上附的舱体、立柱组件的模块化设计,整体呈门洞型,平台组件的两侧的竖臂结构之间作为通道,以便货物、车辆等被检物体通行,平台结构置于通道上方。第一探测器组件被至少设置在平台组件中。当射线扫描组件2的射线源发射的射线从第一舱体1射出后,朝向通道照射被检测物体,经过被检物体散射的射线束最终反射到平台结构的底部设置的第一探测器组件上,产生在垂直方向上的背散射扫描探测信号,经过被检物体透射的射线束最终照射到第一竖臂结构32、第二竖臂结构33和/或第一立柱组件41和第二立柱组件42中设置的第一探测器组件上,产生在垂直方向上透射扫描探测信号。
根据本申请实施例提供的第一成像系统,一体式n型平台组件、上附的舱体以及立柱组件的模块化设计,简化了部件数量,利于转场和安装调试。此外,根据本申请提供第一成像系统,舱体附接在平台组件上,在转场时无需拆分,在安装调试时,不需要重新调整舱体中的射线扫描组件的束流面和立柱组件中的探测器的束流面即能实现共面,便于现场的快速部署。
下面描述第二成像系统。图6示出根据本申请实施例的第二成像系统的示意图;以及图7示出根据本申请实施例的第二成像系统的第二舱体的示意图。
在第二成像系统中,第二舱体5包括第二射线扫描组件6。射线扫描组件6包括射线源(未图示),例如电子直线加速器、电子感应加速器、X射线管(X光机)或同位素源,该射线源用于发射射线,例如X射线,以照射被检物体。在一些实现方式中,射线扫描组件6发出的射线束具有扇形形式,以便实现对被检物体的整个扫描。射线束被保持在一定的扇束角度内,该扇束角度可根据上臂架和竖臂架的尺寸而调整和设置。第二舱体5内有用于安装射线扫描组件6的安装组件,因此射线扫描组件6是可更换的。应理解,射线扫描组件6的配置和类型不受限制。
上臂架7为一体式n型臂架,该一体式n型臂架具有横臂结构71和位于横臂结构71两侧的第三竖臂结构72和第四竖臂结构73,其中上臂架7的第三竖臂结构72与第二舱体5附接。予以说明,本申请实施例的检查系统的各部件重达数吨,因此通过臂架采用n型结构,有利于在拆分后运输时保持为安装调试时的姿态,避免臂架倒放运输时容易造成的变形。应理解,虽然在图中示出的上臂架的横臂结构71和第三竖臂结构72以及第四竖臂结构73均为直线型,从而上臂架7为直角式n型臂架,但是在一些实施例中,上臂架的横臂结构71和第三竖臂结构72以及第四竖臂结构73也可以带有弧度,从而上臂架7为弧角式n型臂架。还应理解,虽然在图中示出的上臂架的第三竖臂结构72以及第四竖臂结构73具有基本相同的长度,但是在一些实施例中,第四竖臂结构73可以被设置为较短的长度,只要能与竖臂架8附接即可,并且在此情况下,竖臂架8的长度需相应调整,使得通道两侧的高度基本相当。
竖臂架8的上端81与上臂架7的第四竖臂结构73附接。第二探测器组件被设置在以下组件中的至少一者中:第二舱体5的侧部、上臂架7和竖臂架8。在第二舱体5的侧部布置第二探测器组件的实施例中,此探测器组件被设置在第二舱体5的侧部以适配并能够探测从第二舱体5的射线扫描装置6出射并经被检物体而散射出的射线束,从而尽可能获取到被检物体各个部分的信息。由此,可以实现在水平方向上的侧散射探测扫描。
在上臂架7和竖臂架8中的至少一者布置第一探测器组件的实施例中,此探测器组件被设置在上臂架7和竖臂架8中以适配并能够探测从第二舱体5的射线扫描装置6出射并经被检物体而透射出的射线束,从而尽可能获取到被检物体各个部分的信息。由此,可以实现在水平方向上的透射探测扫描。
在第二舱体5的侧部、以及上臂架7和竖臂架8中的至少一者都布置了第二探测组件的实施例中,可同时实现上述在水平方向上的侧散射探测扫描和在水平方向上的透射探测扫描。
在一些实施例中,在第二成像系统中,如图6所示,竖臂架8的下端82通过底部定位座9而与地面保持一定距离。竖臂架8的下方是悬空的。底部定位座9并不约束竖臂架8的姿态,只限制风吹竖臂架8造成的摆动。
在一些实施例中,底部定位座9可伸缩地设置在竖臂架8的下端82。在一些实施例中,如图1所示,底部定位座9可包括至少两个支撑件,每个支撑件可独立地伸缩。支撑件的前端或者支撑件的整体可由具有弹性的材料(例如硬质橡胶弹性体)构成。由此,在支撑件接触地面时,能够根据地貌等调整竖臂架8及与其附接的上臂架7的位置和姿态,保证竖臂架8等的触地稳定性,进一步确保探测器的束流面与射线扫描组件的束流面的共面。
在一些实施例中,在第二舱体5和竖臂架8中设置有水平测量装置,例如水平测量仪,以用于调节第二舱体5和竖臂架8的水平度。在该情况下,可以首先固定作为承载体的第二舱体5,然后依次附接上臂架7和竖臂架8,在附接上臂架8时根据第二舱体5的水平测量装置来调整竖臂架8的水平测量装置,使得两者的水平测量装置处于与水平位置相比相同的倾斜度(可以为0度),对第二舱体5和竖臂架8的相对位置进行校准。通过这样地设置水平测量装置,可以进一步确保探测器的束流面与射线扫描组件的束流面的共面。
在一些实施例中,如图7所示,第二舱体5包括法兰接口51和功能扩展接口52。法兰接口51可以用于与上臂架7的第三竖臂结构72附接。功能扩展接口52用于附接附加功能装置,从而使得第二舱体5可根据需要来配置更多的功能。例如,功能扩展接口52可以用于附接第一成像系统的第一立柱组件41或第一竖臂结构32。功能扩展接口52可包括机械接口和电气接口等。虽然图中示出功能扩展接口55位于第二舱体5的顶部拐角处,但是应理解,功能扩展接口52在第二舱体5中的位置不受限制,例如,功能扩展接口52可以布置在第二舱体5的任意侧上的任意位置处。在一些实施例中,附加功能装置例如可以是具备顶视角透射扫描或背散射扫描功能的门架装置,通过将该门架装置直接附接至舱体的顶部的功能扩展接口52,可以实现水平视角和垂直视角两个方向的扫描检查。在一些实施例中,附加功能装置可以是具备背散射扫描功能的移动小车(AGV),通过将该可移动小车与设置在舱体的前侧(在图1中,为面向读者的一侧)的功能扩展接口52附接,可以实现水平透射和水平背散射功能的扫描检查。另外,也可以在竖臂架8的前侧设置功能扩展接口,实现水平透射和水平双向背散射功能的扫描检查。予以说明,功能扩展接口52的设置位置以及附加功能装置的类型等,可根据实际需求定制化设计和布置。
在一些实施例中,上臂架7的第三竖臂结构72与第二舱体5通过法兰而附接,并且上臂架7的第四竖臂结构73与竖臂架的上端81通过法兰而附接。法兰的利用有利于各模块易于安装和拆卸。在一些实施例中,第二舱体5与上臂架7的第三竖臂结构72可通过定位销被定位,并且上臂架7的第四竖臂结构73与竖臂架8的上端11可通过定位销被定位,从而辅助实现对准并便于安装和拆卸。
在一些实施例中,上臂架7的第三竖臂结构72与第二舱体5也可以通过滑座结构或旋转结构而附接。在一些实施例中,可以在第二舱体5上设置有滑座结构,第三竖臂结构72连接到该滑座结构,从而第三竖臂结构72可以在预定范围内沿着滑座结构滑动,进而可以带动横臂结构、第四竖臂结构73以及附接的竖臂架8在小范围内摆动。在一些实施例中,可以在第二舱体5的上方设置旋转结构,第三竖臂结构72连接到该旋转结构,从而在旋转结构的带动下,第三竖臂结构72、进而横臂结构、第四竖臂结构73以及附接的竖臂架8可以在小角度范围内(例如5-10°)转动。相应地,射线扫描组件6也可以同样地通过滑座结构或旋转结构设置在第二舱体5中,并且可以被配置为能够与第三竖臂结构72等同步地滑动或旋转,从而实现小角度扫描。
在一些实施例中,竖臂架8可以通过折叠件而以可折叠的方式附接到第四竖臂结构73。在此情况中,在转场运输时,竖臂架8和第四竖臂结构73无需完全拆分开,在安装时,只要把折叠件打开即可实现竖臂架8和第四竖臂结构73安装,从而进一步简化安装调适。
在一些实施例中,竖臂架8和上臂架7中的至少一者还可以包括传感器组件。传感器组件例如可包括激光测速仪、激光测距仪、红外光幕等。应理解,传感器组件的类型和配置不受限制。
在一些实施例中,第二舱体5、上臂架7和竖臂架8中的每一者包括电气组件,以用于实现彼此电气通信。电气组件例如可以包括各种附属电气设备布置、配电、控制线路等。
根据本申请实施例的第二成像系统采用第二舱体、一体式n型上臂架和竖臂架的三段模块化设计,整体呈门洞型,第二舱体5是整个扫描系统的承载体,第二舱体5和竖臂架8分置于两侧,其间作为通道,以便货物、车辆等被检物体通行,一体式n型上臂架7置于通道上方,上臂架7的第三竖臂结构72与第二舱体5附接,上臂架7的第四竖臂结构73与竖臂架8附接。第二探测器组件被设置第二舱体5的侧部、上臂架7和竖臂架8中的至少一者中。当射线扫描组件的射线源发射的射线从第二舱体5射出后,朝向通道照射被检测物体,经过被检物体散射的射线束最终照射到第二舱体的侧部设置的第二探测器组件上,产生在水平方向上的侧散射扫描探测信号,经过被检物体透射的射线束最终照射到上臂架和/或竖臂架设置的第二探测器组件上,产生在水平方向上透射扫描探测信号。
根据本申请实施例提供的第二成像系统,采用舱体、一体式n型上臂架和竖臂架的三段模块化设计,简化了部件数量,利于转场和安装调试。此外,根据本申请提供的检查系统,取消了传统分体横竖臂结构,将支撑结构与臂架整合,在安装调试时,不需要重新调整上臂架和竖臂架的探测器的束流面与射线扫描组件的束流面即能实现共面,便于现场的快速部署。
通过本申请的检查系统将第一成像系统和第二成像系统组合使用,第一成像系统通过其第一竖臂结构或第一立柱组件与第二成像系统的第二舱体附接(例如经由功能扩展接口),从而实现至少双源双视角扫描检测。对于每个成像系统而言,各自采用了数量较少的部件,便于转场和运输,在重新安装时,仅需要将这些部分附接即可。在安调时,将射线扫描组件的射线束流扇面调整到位后,在系统拆卸后再重新安装时,只要保证立柱组件、第二舱体和竖臂架等的水平姿态,后续安装的上臂架和各竖臂结构的探测器的束流面与相应射线扫描组件的束流面不需调整即能够实现共面,便于现场的快速部署。
在一些实施例中,本申请的检查系统还包括第三成像系统,第三成像系统包括第三舱体(未图示),第三舱体包括第三射线扫描组件和第三探测器组件,其中,第三舱体附接到第二舱体5或竖臂架8的前侧(在图1中,为面向读者的一侧)。在一些实施例中,将两个第三舱体分别附接到第二舱体5和竖臂架8的前侧。第三探测器组件被设置在第三舱体的侧部,以适配并能够探测从第三舱体的射线扫描装置出射并经被检物体而散射出的射线束,从而尽可能获取到被检物体各个部分的信息。由此,可以实现在水平方向上的另一扫描平面的背散射探测扫描。应理解,从第三舱体的射线扫描装置出射并经被检物体而透射出的射线束也可以被上臂架7和竖臂架8中设置的第二组探测器扫描接收,进一步增强在水平方向上的透射探测扫描信号。
此外,应理解,在附图中示出的各部分的尺寸比例,但是这并不一定是成实际比例的绘制的,而是这些图示仅仅是示意性的,系统各部分的尺寸根据各种运输方式的限界来设计和优化,尽量减少装箱、装舱量。
以上是对根据本申请实施例的检查系统的说明,下面参考图8来描述根据本申请实施例的检查系统的安装方法。
如图8所示,根据本申请实施例的检查系统的安装方法包括S801-S806。
在S801,提供第一舱体和平台组件。第一舱体包括第一射线扫描组件,平台组件为一体式n型平台,该一体式n型平台具有平台结构和位于平台结构两侧的第一竖臂结构和第二竖臂结构,第一舱体附接于平台结构上,第一探测器组件被设置在平台组件中。予以说明,第一舱体和平台组件可构成第一成像系统。
在S802处,提供第二舱体,第二舱体包括第二射线扫描组件。
在S803处,提供上臂架和竖臂架,上臂架为一体式n型臂架,该一体式n型臂架具有横臂结构和位于横臂结构两侧的第三竖臂结构和第四竖臂结构,第二探测器组件被设置在以下组件中的至少一者中:第二舱体的侧部、上臂架和竖臂架。予以说明,第二舱体、上臂架和竖臂架可构成第二成像系统。
在S804处,将第三竖臂结构与第二舱体附接。
在S805处,将第四竖臂结构与竖臂架的上端附接。
在S806处,将第一竖臂结构的下端附接到第二舱体。
在一些实施例中,该检查系统的安装方法还包括:提供第一立柱组件和第二立柱组件,将第一立柱组件的上端与第一竖臂结构附接,将第一立柱组件的下端附接到第二舱体,将第二立柱组件的上端与第二竖臂结构附接。
在一些实施例中,该检查系统的安装方法还包括:将第一立柱组件的下端附接到第二舱体的功能扩展接口处。在一些实施例中,第一立柱组件包括电气组件,以通过功能扩展接口实现与第二舱体的彼此电气通信。
在一些实施例中,该检查系统的安装方法还包括:将第二竖臂结构的下端与竖臂架的上端附接。
在一些实施例中,该检查系统的安装方法还包括:将第一立柱组件的下端附接到第二舱体的功能扩展接口处。
在一些实施例中,该检查系统的安装方法还包括:将平台组件的第一竖臂结构附接到第二舱体的功能扩展接口处。
在一些实施例中,第一立柱组件包括电气组件,以通过功能扩展接口实现与第二舱体的彼此电气通信。
在一些实施例中,平台组件的第一竖臂结构包括电气组件,以通过功能扩展接口实现与第二舱体的彼此电气通信。
在一些实施例中,该检查系统的安装方法还包括:将竖臂架的下端和第二立柱组件的下端分别通过底部定位座而与地面保持一定距离。
在一些实施例中,底部定位座是可伸缩的,该检查系统的安装方法还包括:调节底部定位座以调节竖臂架和第二立柱组件的水平度。
在一些实施例中,底部定位座包括至少两个支撑件,每个支撑件能独立地伸缩。
在一些实施例中,第二舱体和竖臂架中的至少一者设置有水平测量装置,该检查系统的安装方法还包括:利用水平测量装置调节第二舱体和竖臂架中的至少一者的水平度。
在一些实施例中,该检查系统的安装方法还包括:将第三竖臂结构与第二舱体通过以下方式中的一者而附接:法兰、滑座结构或旋转结构。更具体地,在使用法兰附接的情况中,还可以将第三竖臂结构与第二舱体通过定位销而定位。在使用滑座结构和旋转结构的情况中,可以在第二舱体上设置有滑座结构或旋转结构,将第三竖臂结构连接到该滑座结构或旋转结构,从而第三竖臂结构可以在预定范围内沿着滑座结构滑动或随着旋转结构而旋转,进而第四竖臂结构以及附接的竖臂架可以在小范围内摆动或转动。相应地,射线扫描组件也可以同样地通过滑座结构或旋转结构设置在舱体中,并且可以被配置为能够与第三竖臂结构等同步地滑动或旋转,从而实现小角度扫描。应理解,第二成像系统的上述结构也适用于第一成像系统。
在一些实施例中,该检查系统的安装方法还包括:将第四竖臂结构与竖臂架的上端通过法兰或折叠件而附接。更具体地,在使用法兰附接的情况中,还可以将第四竖臂结构与竖臂架的上端通过定位销而定位。在使用折叠件的情况中,在转场运输时,竖臂架和第四竖臂结构无需完全拆分开,在安装时,只要把折叠件打开即可实现竖臂架和第四竖臂结构安装,从而进一步简化安装调适。
在一些实施例中,第一舱体、平台组件以及第一立柱组件和第二立柱组件的每一者包括电气组件,以用于实现彼此电气通信。在一些实施例中,第二舱体、上臂架和竖臂架中的每一者包括电气组件,以用于实现彼此电气通信。电气组件例如可以包括各种附属电气设备布置、配电、控制线路等。
在一些实施例中,该检查系统的安装方法还包括:提供第三舱体,该第三舱体包括第三射线扫描组件和第三探测器组件,以及将第三舱体附接到第二舱体和/或竖臂架。第三舱体可以为第三成像系统。第三舱体可以通过功能扩展接口附接到第二舱体和/或竖臂架的功能扩展接口处。
根据本申请实施例的上述安装系统的安装方法,可以将第一成像系统和第二成像系统组合使用,仅需要通过将第一成像系统的第一竖臂结构和第二成像系统的第二舱体附接即可。对于第一成像系统部分,由于第一舱体和平台组件一起运输,有时仅需要将它们架设在立柱组件上即可,而对于第二成像系统,仅需要将各部分附接并调节第二舱体和竖臂结构的水平姿态即可实现束流面共面,因此便于现场的快速部署。
以上对本发明的实施例的详细描述涵盖了许多具体细节,以便提供对本发明的全面理解。但是,对于本领域技术人员来说显而易见的是,本发明可以在不需要这些具体细节中的一些细节的情况下实施。上面对实施例的描述仅仅是为了通过示出本发明的示例来提供对本发明更清楚的理解。本发明绝不限于下面所提出的任何具体配置和方法步骤,而是在不脱离本发明的教导的前提下覆盖了相关元素、部件和方法步骤的任何修改、替换和改进。
应当注意,在权利要求中,单词“包含”或“包括”并不排除存在未列在权利要求中的元件或组件。位于元件或组件之前的冠词“一”或“一个”也并不排除存在多个这样的元件或组件的情况。
此外,还应当注意,本说明书中使用的语言主要是为了可读性和教导的目的而选择的,而不是为了解释或者限定本发明的主题而选择的。因此,在不偏离所附权利要求书的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。关于本发明的范围,说明书中所做的描述都是说明性的,而非限制性的,本发明的范围由所附权利要求书限定。