一种车厢分层装置形变检测方法
文献发布时间:2024-01-17 01:13:28
技术领域
本发明涉及一种物流运输领域,尤其涉及一种车厢分层装置形变检测方法。
背景技术
随着中国经济的发展,公路货物运输行业重要性不断提升,其在运量、周转量等方面均遥遥领先于其它运输方式。厢式车作为公路运输的主流工具,但仍然基本以单层载货为主,人工装卸货物,货物装卸效率低、成本高,车厢容量及其利用率有限。
目前,有采用车厢分层技术提高车辆容量及其利用率的方案,现有的主要分层技术有固定分层式货架、剪叉式升降货架、折叠货架和移动分层装置等。移动分层装置为在车厢壁上设置轨道,支撑杆的两端分别在两侧车厢壁的轨道上滑动,固定在预设的位置。例如,一种在中国专利文献上公开的“一种厢式车的车厢”,其公告号CN103350724A,包括面板和固连在面板上的内板,它还包括呈长板状的分层板,所述分层板两侧具有凸出的连接部且在分层板中部具有分层导轨,上述内板与面板之间具有与连接部相匹配的定位凹口,上述分层板的两侧的连接部分别位于对应的定位凹口处。
由于车厢壁不是刚性的,而移动分层装置与车厢壁垂直,车辆运输过程中存在加速、刹车与颠簸等给车厢壁带来不确定的力作用,容易造成车厢壁的形变;且运输的货物重量不确定,存在整车货物或半车货物的情况,移动分层装置的受力不均匀,容易发生形变,造成其与车厢壁脱落的情况。
发明内容
本发明主要解决现有具有移动分层装置的厢式车的车厢壁和支撑组件容易发生形变,造成运输的安全隐患的问题;提供一种车厢分层装置形变检测方法,在移动分层装置的支撑组件和车厢壁之间设置若干传感器,通过检测数据的组合及对比判断车厢壁和支撑组件的形变程度,及时告知相关工作人员。
本发明的上述技术问题主要是通过下述技术方案得以解决的:
一种车厢分层装置形变检测方法,包括以下步骤:
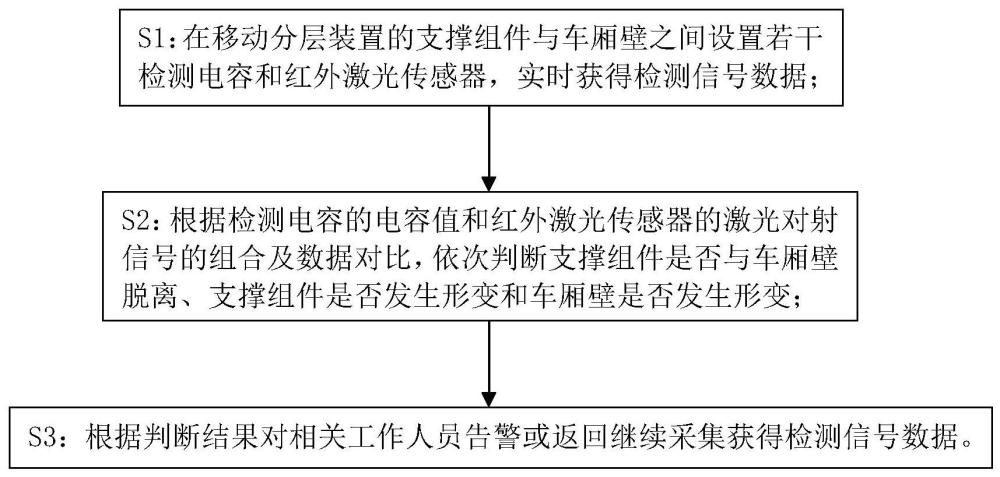
S1:在移动分层装置的支撑组件与车厢壁之间设置若干检测电容和红外激光传感器,实时获得检测信号数据;
S2:根据检测电容的电容值和红外激光传感器的激光对射信号的组合及数据对比,依次判断支撑组件是否与车厢壁脱离、支撑组件是否发生形变和车厢壁是否发生形变;
S3:根据判断结果对相关工作人员告警或返回继续采集获得检测信号数据。
在移动分层装置的支撑组件和车厢壁之间设置若干传感器,通过检测数据的组合及对比判断车厢壁和支撑组件的形变程度,及时告知相关工作人员。能够及时发现移动分层组件的形变情况,保证货物的安全运输。
作为优选,在支撑组件上安装红外激光传感器;在支撑组件的一端设置红外发生器;在支撑组件的另一端沿支撑组件边缘阵列设置若干红外接收器。
在支撑组件正常载物的情况下,相应的几个红外接收器能够接收到红外发生器的激光;在支撑组件扭曲的情况下,周边的其他红外接收器接收红外发生器的激光;相应的,通过接收到红外信号的红外接收器与历史记录中接收红外信号的红外发生器的位置关系确定支撑组件的扭曲程度;在支撑组件载物过重弯曲的情况下,红外接收器无法接收红外信号。
作为优选,在支撑组件与车厢壁的连接处设置有压电开关,压电开关与红外激光传感器的红外发生器连接。
当正常情况下,压电开关因为支撑组件与车厢壁的连接关系得电闭合,红外发生器能发生红外信号;当支撑组件与车厢壁距离过远,压电开关的压力低于阈值,则压电开关断开,红外发生器无法发生红外信号。
作为优选,在支撑组件与车厢壁的连接处设置有至少两个电容器,电容器的电容片分别设置在车厢壁与支撑组件的连接端;电容器沿支撑组件移动方向设置。
因为电容器的容值与电容片之间的距离有关,根据电容器之间容值关系的比较,判断支撑组件是否有脱离的趋势。在其他条件相同的情况下,若电容器之间的电容差大于一定的阈值,则确定支撑组件与车厢壁的连接的端面一侧距离远大于另一侧的距离,即支撑组件的连接面与车厢壁之间的夹角过大,存在脱离的风险。
作为优选,支撑组件与车厢壁脱离判断过程为:
A1:判断红外激光传感器的是否发生红外激光信号,若是,则判断支撑组件与车厢壁未发生脱离,进入支撑组件形变判断;若否,则进入下一步判断;
A2:获取对应位置电容器的电容值,计算电容值差;判断电容值差是否大于设定的容差阈值,若是,则判断支撑组件与车厢壁脱离;若否,则判断支撑组件与车厢壁未发生脱离,进入支撑组件形变判断。
作为优选,支撑组件形变判断包括支撑组件弯曲判断和支撑组件扭曲判断。
作为优选,所述的支撑组件弯曲判断过程为:
判断红外激光传感器的红外接收器是否接收到红外信号,若是,则进行支撑组件扭曲判断;若否,则判断支撑组件弯曲,对相应工作人员告警。
作为优选,所述的支撑组件扭曲判断过程为:
将历史数据中支撑组件正常工况下的接收到红外信号的红外接收器位置记录到接收集合中;
判断实时接收到红外信号的红外接收器位置是否处于接收集合中,若是,则判断支撑组件正常,进行车厢壁形变判断;若否,则判断支撑组件扭曲,对相应工作人员告警。
作为优选,车厢壁形变判断包括以下过程:
获取支撑组件两侧与车厢壁连接处所有电容器的电容值数据;
判断是否所有电容值数据均处于预设的容值阈值范围内,若是,则判断车厢壁未发生形变,继续获取检测信号数据;若否,则判断车厢壁发生形变,对相应工作人员告警。
本发明的有益效果是:
1. 在移动分层装置的支撑组件和车厢壁之间设置若干传感器,通过检测数据的组合及对比判断车厢壁和支撑组件的形变程度,及时告知相关工作人员。能够及时发现移动分层组件的形变情况,保证货物的安全运输。
2.通过多个传感器组合判断,能精确判断多个场景的情况,判断结果更加细化,更具有信服力。
附图说明
图1是本发明的车厢分层装置形变检测方法流程图。
具体实施方式
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
实施例:
本实施例的一种车厢分层装置形变检测方法,如图1所示,包括以下步骤:
S1:在移动分层装置的支撑组件与车厢壁之间设置若干检测电容和红外激光传感器,实时获得检测信号数据。
1)在支撑组件上安装红外激光传感器。
在支撑组件的一端设置红外发生器,在支撑组件的另一端沿支撑组件边缘阵列设置若干红外接收器。
在支撑组件正常载物的情况下,相应的几个红外接收器能够接收到红外发生器的激光。
在支撑组件扭曲的情况下,周边的其他红外接收器接收红外发生器的激光。相应的,通过接收到红外信号的红外接收器与历史记录中接收红外信号的红外发生器的位置关系确定支撑组件的扭曲程度。
在支撑组件载物过重弯曲的情况下,红外接收器无法接收红外信号。
2)在支撑组件与车厢壁的连接处设置有压电开关。
压电开关与红外激光传感器的红外发生器连接。
当正常情况下,压电开关因为支撑组件与车厢壁的连接关系得电闭合,红外发生器能发生红外信号。
当支撑组件与车厢壁距离过远,压电开关的压力低于阈值,则压电开关断开,红外发生器无法发生红外信号。
3)在支撑组件与车厢壁的连接处设置有至少两个电容器。
电容器的电容片分别设置在车厢壁与支撑组件的连接端,电容器沿支撑组件移动方向设置。
因为电容器的容值与电容片之间的距离有关,根据电容器之间容值关系的比较,判断支撑组件是否有脱离的趋势。
在其他条件相同的情况下,若电容器之间的电容差大于一定的阈值,则确定支撑组件与车厢壁的连接的端面一侧距离远大于另一侧的距离,即支撑组件的连接面与车厢壁之间的夹角过大,存在脱离的风险。
S2:根据检测电容的电容值和红外激光传感器的激光对射信号的组合及数据对比,依次判断支撑组件是否与车厢壁脱离、支撑组件是否发生形变和车厢壁是否发生形变。
1)支撑组件与车厢壁脱离判断过程为:
A1:判断红外激光传感器的是否发生红外激光信号,若是,则判断支撑组件与车厢壁未发生脱离,进入支撑组件形变判断;若否,则进入下一步判断。
在支撑组件与车厢壁的连接处设置有压电开关,压电开关与红外激光传感器的红外发生器连接。
当正常情况下,压电开关因为支撑组件与车厢壁的连接关系得电闭合,红外发生器能发生红外信号。
当支撑组件与车厢壁距离过远,压电开关的压力低于阈值,则压电开关断开,红外发生器无法发生红外信号。
A2:获取对应位置电容器的电容值,计算电容值差;判断电容值差是否大于设定的容差阈值,若是,则判断支撑组件与车厢壁脱离;若否,则判断支撑组件与车厢壁未发生脱离,进入支撑组件形变判断。
因为电容器的容值与电容片之间的距离有关,根据电容器之间容值关系的比较,判断支撑组件是否有脱离的趋势。
在其他条件相同的情况下,若电容器之间的电容差大于一定的阈值,则确定支撑组件与车厢壁的连接的端面一侧距离远大于另一侧的距离,即支撑组件的连接面与车厢壁之间的夹角过大,存在脱离的风险。
2)支撑组件形变判断包括支撑组件弯曲判断和支撑组件扭曲判断。
2.1支撑组件弯曲判断过程为:
B1:判断红外激光传感器的红外接收器是否接收到红外信号,若是,则进行支撑组件扭曲判断;若否,则判断支撑组件弯曲,对相应工作人员告警。
2.2支撑组件扭曲判断过程为:
B2:将历史数据中支撑组件正常工况下的接收到红外信号的红外接收器位置记录到接收集合中。
B3:判断实时接收到红外信号的红外接收器位置是否处于接收集合中,若是,则判断支撑组件正常,进行车厢壁形变判断;若否,则判断支撑组件扭曲,对相应工作人员告警。
在支撑组件正常载物的情况下,相应的几个红外接收器能够接收到红外发生器的激光。
在支撑组件扭曲的情况下,周边的其他红外接收器接收红外发生器的激光。相应的,通过接收到红外信号的红外接收器与历史记录中接收红外信号的红外发生器的位置关系确定支撑组件的扭曲程度。
在支撑组件载物过重弯曲的情况下,红外接收器无法接收红外信号。
3)车厢壁形变判断包括以下过程:
C1:获取支撑组件两侧与车厢壁连接处所有电容器的电容值数据。
C2:判断是否所有电容值数据均处于预设的容值阈值范围内,若是,则判断车厢壁未发生形变,继续获取检测信号数据;若否,则判断车厢壁发生形变,对相应工作人员告警。
在保证支撑组件为发生形变的情况下,若车厢壁发生了形变,则必然车厢壁与支撑组件之间的距离发生变化,则设置在车厢壁与支撑组件之间的电容器的容值也会发生变化,根据电容器的电容值来判断车厢壁是否发生形变。
S3:根据判断结果对相关工作人员告警或返回继续采集获得检测信号数据。
当判断结果为支撑组件与车厢壁发生脱离或支撑组件弯曲或支撑组件扭曲或车厢壁发生形变任意情况之一的,对相应的工作人员进行告警。否则继续采集获得检测信号数据,直至完成货物的运输。
本实施例的方案在移动分层装置的支撑组件和车厢壁之间设置若干传感器,通过检测数据的组合及对比判断车厢壁和支撑组件的形变程度,及时告知相关工作人员。能够及时发现移动分层组件的形变情况,保证货物的安全运输。通过多个传感器组合判断,能精确判断多个场景的情况,判断结果更加细化,更具有信服力。
应理解,实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所附权利要求书所限定的范围。