一种肠衣自动清洗装置及其使用方法
文献发布时间:2024-01-17 01:16:56
技术领域
本发明涉及清洗设备领域,更具体地说,涉及一种肠衣自动清洗装置及其使用方法。
背景技术
随着人们对于香肠类食品的喜爱程度的增加,香肠的加工也越来越趋向于自动化加工,但是,在灌装香肠之前,需将猪肠衣表面的盐份预清洗,然后再用温水浸泡再清洗干净,使猪肠衣回复原有的柔软性后继续使用,现有专利盐渍猪肠衣自动清洗装置,专利申请号CN206260665U包括大箱体,所述的大箱体由隔板密封地三个单独的小箱体,所述的三个小箱体底部均设有出水孔,且每个出水孔下方设有控制改出水孔开闭的控制机构,所述的控制机构位于小箱体的下部,所述的控制机构包括压杆,压柄和阀门,所述的清洗的箱体下部设有空气阀门,所述的浸泡的箱体上设有温控装置。优点为:将盐渍猪肠衣清洗、浸泡、漂洗一次完成,提升效力,有利于盐渍猪肠衣的清洁度,且易于对浸泡过程中的水温进行控制。
但是肠衣在清洗过程中需要人工捞取,既加大了工作人员的劳动强度,又容易使得清洗的水渍腐蚀工作人员的手部,所以我们提出了一种肠衣自动清洗装置及其使用方法来解决上述存在的问题。
发明内容
1.要解决的技术问题
针对现有技术中存在的问题,本发明的目的在于提供一种肠衣自动清洗装置及其使用方法,整个过程无需人工接触,既能降低工作人员的劳动强度,又不会腐蚀工作人员手部,同时又能提高肠衣清洗效率。
2. 技术方案
为解决上述问题,本发明采用如下的技术方案。
一种肠衣自动清洗装置,包括清洗箱,所述清洗箱内腔中部两侧均设置有隔板,所述隔板用于将清洗箱内腔分隔成多个清洗舱室;
所述清洗箱内腔底部且位于隔板两侧均设置有翻涌机构,所述翻涌机构用于对每个清洗舱室提供清洗动力,所述清洗箱上方设置有移送机构,并且移送机构侧壁通过两个支架与清洗箱侧壁相连,所述移送机构顶部输出端安装有拿取机构,所述移送机构用于配合拿取机构以实现将肠衣依次移动到各个清洗舱室;
其中一个所述支架侧壁设置有控制机构,所述控制机构用于控制上述设备自动运行。
进一步的,所述翻涌机构包括设置于所述清洗箱底部的正反电机和设置于所述清洗箱内腔的波轮,并且波轮底端通过轴杆与正反电机输出端相连,所述轴杆通过轴封与所述清洗箱底壁相连,所述正反电机底部表面设置有固定架,并且固定架两端顶部与清洗箱底部表面相连。
进一步的,所述移送机构包括中空框,所述中空框顶部表面设置有两个电动移动车,所述中空框顶部表面两侧均开设有用于电动移动车移动的轨道槽,两个所述电动移动车顶部表面通过限位架相连。
进一步的,所述拿取机构包括设置于所述限位架上的升降组件和设置于所述升降组件底端的抓取组件。
进一步的,所述升降组件包括设置于所述限位架中部的定位管,所述定位管中部设置有电动推杆,所述电动推杆输出端底部设置有第一法兰板,所述第一法兰板底部与所述抓取组件顶端相连。
进一步的,所述抓取组件包括设置于所述第一法兰板底端的第二法兰板,所述第二法兰板底部通过连杆安装有锥形罩,所述锥形罩底部开口端设置有封板,所述封板底部表面镶嵌连接有防水电动夹爪。
进一步的,所述控制机构包括防水箱和箱门,所述防水箱内腔设置有可编程控制器,所述箱门外壁表面设置有防水触摸屏。
进一步的,所述控制机构还包括设置于所述箱门表面的报警器,所述报警器位于所述防水触摸屏下方。
进一步的,所述清洗箱底部且位于每个翻涌机构一侧均镶嵌连接有排水管,所述排水管中部串接有电磁阀门。
一种肠衣自动清洗方法,包括有以下步骤:
S1:首先通过隔板对清洗箱内腔分隔成多个清洗舱室,使得能够对肠衣进行分级清洗;
S2:工作人员可将含有盐分的肠衣整筐倾倒在清洗箱内最左侧的清洗舱室内,然后通过控制机构,可控制其当前舱室底部的翻涌机构运行,从而能够使得翻涌机构带动清水螺旋转动,进而能够使得清水对含有盐分的肠衣进行初步清洗;
S3:当清洗一定时间后,此时通过控制机构再次控制支架上的移送机构运行,从而能够调整拿取机构到达当前清洗完成的清洗舱室上方,然后此时控制机构又能控制拿取机构向下移动,进而能够使得拿取机构底端伸入至当前清洗舱室内腔,以便于拿取机构对清洗好的肠衣;
S4:当拿取机构抓取完成后,此时拿取机构收缩,并且再移送机构的带动下到达第二个清洗舱室,此时第二个清洗舱室会对初步清洗后的肠衣重复上述动作,完成二次清洗;
S5:当第二个清洗舱室完成二次清洗后,又会在移送机构和拿取机构配合下将肠衣移动到第三个清洗舱室,接着第三个清洗舱室会对二次清洗的肠衣进行三次清洗,当第三个清洗舱室完成对肠衣第三次清洗后;
S6:最后移送机构和拿取机构相互配合可将肠衣移出清洗箱,放入至清洗箱旁的收纳车上。
3. 有益效果
相比于现有技术,本发明的优点在于:
(1)本方案,通过隔板,可对清洗箱内腔分隔成多个清洗舱室,从而能够对肠衣进行分级清洗,当需要对含有盐分的肠衣进行清洗时,首先工作人员可将含有盐分的肠衣整筐倾倒在清洗箱内最左侧的清洗舱室内,然后通过控制机构,可控制其当前舱室底部的翻涌机构运行,从而能够使得翻涌机构带动清水螺旋转动,进而能够使得清水对含有盐分的肠衣进行初步清洗;
当清洗一定时间后,此时通过控制机构再次控制支架上的移送机构运行,从而能够调整拿取机构到达当前清洗完成的清洗舱室上方,然后此时控制机构又能控制拿取机构向下移动,进而能够使得拿取机构底端伸入至当前清洗舱室内腔,以便于拿取机构对清洗好的肠衣,当拿取机构抓取完成后,此时拿取机构收缩,并且再移送机构的带动下到达第二个清洗舱室,此时第二个清洗舱室会对初步清洗后的肠衣重复上述动作,完成二次清洗;
当第二个清洗舱室完成二次清洗后,又会在移送机构和拿取机构配合下将肠衣移动到第三个清洗舱室,接着第三个清洗舱室会对二次清洗的肠衣进行三次清洗,当第三个清洗舱室完成对肠衣第三次清洗后,最后移送机构和拿取机构再次配合,可将肠衣移出清洗箱,放入至清洗箱旁的收纳车上,整个过程无需人工接触,既能降低工作人员的劳动强度,又不会腐蚀工作人员手部,同时又能提高肠衣清洗效率。
(2)本方案,通过翻涌机构中的固定架,既能固定在清洗箱底部表面,又能对正反电机进行安装,然后通过正反电机,可经轴杆带动波轮正反旋转,从而能够带动位于清洗舱室的水进行正反旋转,进而能够对肠衣进行清洗,通过移送机构中的中空框,既能固定在支架上,又能对两个电动移动车提供轨道槽,从而能够方便两个电动移动车灵活的移动,通过限位架,既能固定在两个电动移动车上,又能对拿取机构安装,进而能够载着拿取机构往复移动。
(3)本方案,通过拿取机构中的定位管,既能固定在限位架上,又能对电动推杆进行安装,然后通过第一法兰板和第二法兰板,可将连杆固定在电动推杆底部的输出端,从而能够使得电动推杆带动着位于连杆底端的锥形罩上下移动,由于锥形罩底部通过封板安装有防水电动夹爪,进而能够方便防水电动夹爪再电动推杆的伸缩下伸入或伸出各个清洗舱室,由于锥形罩顶部呈锥形设计,从而能够降低锥形罩从水中向上移动的阻力,进而能够方便防水电动夹爪从水中伸出。
(4)本方案,通过控制机构中的防水箱和箱门,可对可编程控制器和防水触摸屏安装,然后通过防水触摸屏,可经可编程控制器控制正反电机、电动移动车等各个电器设备运行,进而能够对肠衣进行自动清洗,通过报警器,可发出警示信息,进而能够提醒非工作人员靠近,保证了设备使用安全。
附图说明
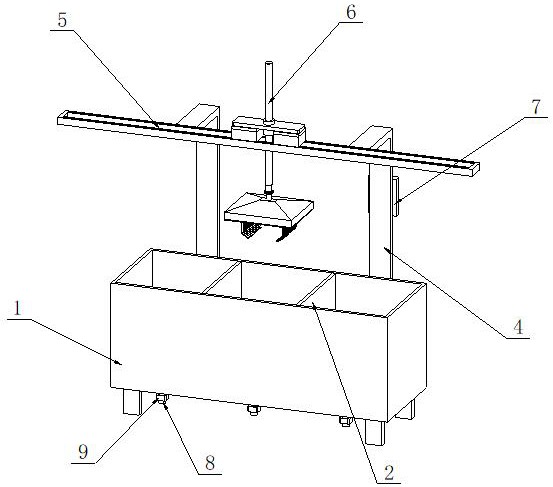
图1为本发明的结构示意图。
图2为本发明的侧面结构示意图。
图3为本发明的剖面结构示意图。
图4为本发明的翻涌机构结构示意图。
图5为本发明的移送机构结构示意图。
图6为本发明的拿取机构结构示意图。
图7为本发明的拿取机构侧面结构示意图。
图8为本发明的控制机构结构示意图。
图中标号说明:
1、清洗箱;2、隔板;3、翻涌机构;301、正反电机;302、轴杆;303、波轮;304、轴封;305、固定架;4、支架;5、移送机构;501、中空框;502、轨道槽;503、电动移动车;504、限位架;6、拿取机构;601、电动推杆;602、定位管;603、第一法兰板;604、第二法兰板;605、连杆;606、锥形罩;607、封板;608、防水电动夹爪;7、控制机构;701、防水箱;702、箱门;703、可编程控制器;704、防水触摸屏;705、报警器;8、排水管;9、电磁阀门。
实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例
请参阅图1-3,一种肠衣自动清洗装置,包括清洗箱1,清洗箱1内腔中部两侧均设置有隔板2,隔板2用于将清洗箱1内腔分隔成多个清洗舱室;清洗箱1内腔底部且位于隔板2两侧均设置有翻涌机构3,翻涌机构3用于对每个清洗舱室提供清洗动力,清洗箱1上方设置有移送机构5,并且移送机构5侧壁通过两个支架4与清洗箱1侧壁相连,移送机构5顶部输出端安装有拿取机构6,移送机构5用于配合拿取机构6以实现将肠衣依次移动到各个清洗舱室;其中一个支架4侧壁设置有控制机构7,控制机构7用于控制上述设备自动运行;
通过隔板2,可对清洗箱1内腔分隔成多个清洗舱室,从而能够对肠衣进行分级清洗,当需要对含有盐分的肠衣进行清洗时,首先工作人员可将含有盐分的肠衣整筐倾倒在清洗箱1内最左侧的清洗舱室内,然后通过控制机构7,可控制其当前舱室底部的翻涌机构3运行,从而能够使得翻涌机构3带动清水螺旋转动,进而能够使得清水对含有盐分的肠衣进行初步清洗,当清洗一定时间后,此时通过控制机构7再次控制支架4上的移送机构5运行,从而能够调整拿取机构6到达当前清洗完成的清洗舱室上方,然后此时控制机构7又能控制拿取机构6向下移动,进而能够使得拿取机构6底端伸入至当前清洗舱室内腔,以便于拿取机构6对清洗好的肠衣,当拿取机构6抓取完成后,此时拿取机构6收缩,并且再移送机构5的带动下到达第二个清洗舱室,此时第二个清洗舱室会对初步清洗后的肠衣重复上述动作,完成二次清洗,当第二个清洗舱室完成二次清洗后,又会在移送机构5和拿取机构6配合下将肠衣移动到第三个清洗舱室,接着第三个清洗舱室会对二次清洗的肠衣进行三次清洗,当第三个清洗舱室完成对肠衣第三次清洗后,最后移送机构5和拿取机构6再次配合,可将肠衣移出清洗箱1,放入至清洗箱1旁的收纳车上,整个过程无需人工接触,既能降低工作人员的劳动强度,又不会腐蚀工作人员手部,同时又能提高肠衣清洗效率。
参阅图3、图4,翻涌机构3包括设置于清洗箱1底部的正反电机301和设置于清洗箱1内腔的波轮303,并且波轮303底端通过轴杆302与正反电机301输出端相连,轴杆302通过轴封304与清洗箱1底壁相连,正反电机301底部表面设置有固定架305,并且固定架305两端顶部与清洗箱1底部表面相连,通过翻涌机构3中的固定架305,既能固定在清洗箱1底部表面,又能对正反电机301进行安装,然后通过正反电机301,可经轴杆302带动波轮303正反旋转,从而能够带动位于清洗舱室的水进行正反旋转,进而能够对肠衣进行清洗。
参阅图3、图5,移送机构5包括中空框501,中空框501顶部表面设置有两个电动移动车503,中空框501顶部表面两侧均开设有用于电动移动车503移动的轨道槽502,两个电动移动车503顶部表面通过限位架504相连,通过移送机构5中的中空框501,既能固定在支架4上,又能对两个电动移动车503提供轨道槽502,从而能够方便两个电动移动车503灵活的移动,通过限位架504,既能固定在两个电动移动车503上,又能对拿取机构6安装,进而能够载着拿取机构6往复移动。
参阅图3、图6和图7,拿取机构6包括设置于限位架504上的升降组件和设置于升降组件底端的抓取组件,升降组件包括设置于限位架504中部的定位管602,定位管602中部设置有电动推杆601,电动推杆601输出端底部设置有第一法兰板603,第一法兰板603底部与抓取组件顶端相连,抓取组件包括设置于第一法兰板603底端的第二法兰板604,第二法兰板604底部通过连杆605安装有锥形罩606,锥形罩606底部开口端设置有封板607,封板607底部表面镶嵌连接有防水电动夹爪608;
通过拿取机构6中的定位管602,既能固定在限位架504上,又能对电动推杆601进行安装,然后通过第一法兰板603和第二法兰板604,可将连杆605固定在电动推杆601底部的输出端,从而能够使得电动推杆601带动着位于连杆605底端的锥形罩606上下移动,由于锥形罩606底部通过封板607安装有防水电动夹爪608,进而能够方便防水电动夹爪608再电动推杆601的伸缩下伸入或伸出各个清洗舱室,由于锥形罩606顶部呈锥形设计,从而能够降低锥形罩606从水中向上移动的阻力,进而能够方便防水电动夹爪608从水中伸出。
参阅图8,控制机构7包括防水箱701和箱门702,防水箱701内腔设置有可编程控制器703,箱门702外壁表面设置有防水触摸屏704,通过控制机构7中的防水箱701和箱门702,可对可编程控制器703和防水触摸屏704安装,然后通过防水触摸屏704,可经可编程控制器703控制正反电机301、电动移动车503等各个电器设备运行,进而能够对肠衣进行自动清洗。
参阅图8,控制机构7还包括设置于箱门702表面的报警器705,报警器705位于防水触摸屏704下方,通过报警器705,可发出警示信息,进而能够提醒非工作人员靠近,保证了设备使用安全。
参阅图1、图2,清洗箱1底部且位于每个翻涌机构3一侧均镶嵌连接有排水管8,排水管8中部串接有电磁阀门9,当需要对各个舱室内的清洗水进行排出时,通过开启相应的电磁阀门9,从而能够经排水管8排水清洗水。
一种肠衣自动清洗方法,包括有以下步骤:
S1:首先通过隔板2对清洗箱1内腔分隔成多个清洗舱室,使得能够对肠衣进行分级清洗;
S2:工作人员可将含有盐分的肠衣整筐倾倒在清洗箱1内最左侧的清洗舱室内,然后通过控制机构7,可控制其当前舱室底部的翻涌机构3运行,从而能够使得翻涌机构3带动清水螺旋转动,进而能够使得清水对含有盐分的肠衣进行初步清洗;
S3:当清洗一定时间后,此时通过控制机构7再次控制支架4上的移送机构5运行,从而能够调整拿取机构6到达当前清洗完成的清洗舱室上方,然后此时控制机构7又能控制拿取机构6向下移动,进而能够使得拿取机构6底端伸入至当前清洗舱室内腔,以便于拿取机构6对清洗好的肠衣;
S4:当拿取机构6抓取完成后,此时拿取机构6收缩,并且再移送机构5的带动下到达第二个清洗舱室,此时第二个清洗舱室会对初步清洗后的肠衣重复上述动作,完成二次清洗;
S5:当第二个清洗舱室完成二次清洗后,又会在移送机构5和拿取机构6配合下将肠衣移动到第三个清洗舱室,接着第三个清洗舱室会对二次清洗的肠衣进行三次清洗,当第三个清洗舱室完成对肠衣第三次清洗后;
S6:最后移送机构5和拿取机构6相互配合可将肠衣移出清洗箱1,放入至清洗箱1旁的收纳车上。
工作时,通过隔板2,可对清洗箱1内腔分隔成多个清洗舱室,从而能够对肠衣进行分级清洗,当需要对含有盐分的肠衣进行清洗时,首先工作人员可将含有盐分的肠衣整筐倾倒在清洗箱1内最左侧的清洗舱室内,然后通过控制机构7,可控制其当前舱室底部的翻涌机构3运行,从而能够使得翻涌机构3带动清水螺旋转动,进而能够使得清水对含有盐分的肠衣进行初步清洗,当清洗一定时间后,此时通过控制机构7再次控制支架4上的移送机构5运行,从而能够调整拿取机构6到达当前清洗完成的清洗舱室上方,然后此时控制机构7又能控制拿取机构6向下移动,进而能够使得拿取机构6底端伸入至当前清洗舱室内腔,以便于拿取机构6对清洗好的肠衣,当拿取机构6抓取完成后,此时拿取机构6收缩,并且再移送机构5的带动下到达第二个清洗舱室,此时第二个清洗舱室会对初步清洗后的肠衣重复上述动作,完成二次清洗,当第二个清洗舱室完成二次清洗后,又会在移送机构5和拿取机构6配合下将肠衣移动到第三个清洗舱室,接着第三个清洗舱室会对二次清洗的肠衣进行三次清洗,当第三个清洗舱室完成对肠衣第三次清洗后,最后移送机构5和拿取机构6再次配合,可将肠衣移出清洗箱1,放入至清洗箱1旁的收纳车上,整个过程无需人工接触,既能降低工作人员的劳动强度,又不会腐蚀工作人员手部,同时又能提高肠衣清洗效率;
通过翻涌机构3中的固定架305,既能固定在清洗箱1底部表面,又能对正反电机301进行安装,然后通过正反电机301,可经轴杆302带动波轮303正反旋转,从而能够带动位于清洗舱室的水进行正反旋转,进而能够对肠衣进行清洗,通过移送机构5中的中空框501,既能固定在支架4上,又能对两个电动移动车503提供轨道槽502,从而能够方便两个电动移动车503灵活的移动,通过限位架504,既能固定在两个电动移动车503上,又能对拿取机构6安装,进而能够载着拿取机构6往复移动;
通过拿取机构6中的定位管602,既能固定在限位架504上,又能对电动推杆601进行安装,然后通过第一法兰板603和第二法兰板604,可将连杆605固定在电动推杆601底部的输出端,从而能够使得电动推杆601带动着位于连杆605底端的锥形罩606上下移动,由于锥形罩606底部通过封板607安装有防水电动夹爪608,进而能够方便防水电动夹爪608再电动推杆601的伸缩下伸入或伸出各个清洗舱室,由于锥形罩606顶部呈锥形设计,从而能够降低锥形罩606从水中向上移动的阻力,进而能够方便防水电动夹爪608从水中伸出;
通过控制机构7中的防水箱701和箱门702,可对可编程控制器703和防水触摸屏704安装,然后通过防水触摸屏704,可经可编程控制器703控制正反电机301、电动移动车503等各个电器设备运行,进而能够对肠衣进行自动清洗,通过报警器705,可发出警示信息,进而能够提醒非工作人员靠近,保证了设备使用安全。
以上,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。