用于处理屠体部分的食物处理系统
文献发布时间:2024-01-17 01:20:32
技术领域
本发明涉及食物处理系统和用于处理由悬垂轨道系统输送的屠体部分的方法,该悬垂轨道系统包括间隔开的多个钩环,该多个钩环设计用于承载屠体部分。
背景技术
许多现今实施的屠宰场利用悬垂轨道系统来输送屠体部分,诸如在去骨时悬挂在钩环上的猪屠体部分。
尽管在当前的悬垂轨道系统中可以看到越来越多的自动化,但仍然有很大一部分的去骨是由操作员手动地执行。操作员的技能差异很大,这反映在去骨的质量和产量上。
发明内容
本发明的实施例的目的是提供改进的和更自动化的食物处理系统和方法。
通常而言,本发明优选地寻求单独地或以任何组合来减轻、缓解或消除现有技术的上面提及的缺点中的一个或多个。特别是,可以将提供解决了上面提及的问题或其他问题的系统看作本发明的实施例的目的。
为了更好地解决这些问题中的一个或多个,在本发明的第一方面,提供了食物处理系统,该食物处理系统包括:
·悬垂轨道系统,该悬垂轨道系统包括间隔开的多个钩环,该多个钩环设计用于承载屠体部分使得屠体部分至少部分地自由地悬挂,
·重新定位设备,该重新定位设备包括接合结构,该接合结构可以通过移动机构选择性地移动,以及
·至少一个食物处理装置,该至少一个食物处理装置用于在屠体部分被输送经过至少一个食物处理装置时在屠体部分上执行至少一个食物处理步骤,
其中,间隔开的多个钩环和接合结构以同步的方式移动,
其中,接合结构配置成在不同于钩环的承载位置的位置处接合屠体部分并且将相对于竖向轴线的角位置从初始角位置调整到预定义角处理位置。在实行食物处理步骤的情况下,预定义角处理位置可以被调节用于后续的食物处理步骤,或者,换言之,在食物处理系统的使用中,在实行食物处理步骤的情况下,可以针对食物处理步骤对预定义角处理位置进行优化。
因此,提供了简化的机械解决方案以针对待在屠体部分上执行的后续处理来调整屠体部分的角位置,由此可以使产量最大化并且可以需要更少或甚至不需要人工劳动。
不同于钩环的承载位置的位置优选地是在钩环的承载位置下方。
根据本发明,术语“屠体部分”可以理解为来自诸如牛、羊羔、猪之类的屠宰的四足动物的任何部分,例如猪的半屠体、腿部部分、大腿后部(hams)和肩部部分。
在一个实施例中,至少一个食物处理装置包括两个或更多个食物处理装置,该两个或更多个食物处理装置具有相关联的两个或更多个不同的预定义角处理位置。因此,可以完全自动地在屠体部分上执行不同的操作,诸如切割、去骨或去皮或去脂的操作,目的是使产量充分最大化和/或满足客户的偏好,例如如何对屠体部分进行切割、去皮和/或去脂。
移动机构可以配置成相对于钩环移动接合结构,诸如例如平行于与钩环的输送方向相同或相反的方向,和/或平行于相对于钩环的输送方向形成角度的任何方向,其中接合结构的前进速度被控制使得到达所述预定义角处理位置。
在一个实施例中,系统还包括感测装置,该感测装置连接到控制装置,该控制装置配置成控制移动机构并且由此控制重新定位设备,其中感测装置配置成感测屠体部分的至少一个特性性能,并且其中控制装置配置成基于感测到的至少一个特性性能来调度两个或更多个食物处理装置的处理顺序。由此,现在可以例如基于大小/形状/颜色/外观来相应地调整处理步骤。作为示例,这可以包括基于感测到的屠体部分的特性性能,仅对屠体部分的一个或多个特定侧部进行部分地去皮。作为示例,甚至可以将客户的订单要求用作决定该处理顺序的附加的输入参数。
在一个实施例中,调度后的处理顺序包括两个或更多个食物处理装置中的一部分,由此使未参与在处理顺序中的剩余的一个或多个食物处理装置被屠体部分绕过。作为示例,这可以包括执行多个处理步骤,诸如切割、锯切等,但是例如不进行去皮,其中屠体部分中的一些可以经过剥皮装置,该剥皮装置可以自动置于被动模式。
在一个实施例中,控制装置还配置成在处理步骤之间或在第一处理步骤之前调整钩环的旋转轴线。由此,可以为下一个处理步骤自动地完全地对准屠体部分,并且由此提高了系统的灵活性。
在一个实施例中,至少一个食物处理装置包括自动食物处理装置,该自动食物处理装置用于执行自动食物处理步骤。该食物处理装置可以包括但不限于圆形刀、锯片、任何类型的去皮刀和/或去脂刀。应当注意,在于屠体部分上进行手动处理操作之前,可以附加地达到预定义角处理位置,从而有助于和优化操作人员对屠体部分的定位。
在一个实施例中,接合结构包括以下部件中的一个或多个:
·第一支撑构件和第二支撑构件,其中支撑构件配置成与屠体部分的不同的侧部接合,或者
·抽吸装置,该抽吸装置配置成接合屠体部分并且在屠体部分上施加抽吸力。
在一个实施例中,将角位置从初始角位置调整到预定义角处理位置的步骤是由第一支撑构件和第二支撑构件之间的相对运动引起的。第一支撑构件可以相对于第二支撑构件和输送方向定位在上游侧部上,其中第一支撑构件和第二支撑构件之间的初始距离超过屠体部分的支撑构件所接合处的部分的宽度。最初,上游支撑构件在屠体部分上提供一些压力,其中,在屠体部分的另一个侧部和第二支撑构件之间存在空间。该空间足以允许第一支撑构件推到屠体部分上,并且调整该屠体部分的角位置直到该屠体部分接触第二支撑构件并且被夹持在第一支撑构件和第二支撑构件之间。在该位置处,达到预定义角处理位置,并且可以一直达到该预定义角处理位置直到下一个处理步骤发生。因此,提供了简单的机械解决方案来自动地调整角位置。
在一个实施例中,移动机构包括转盘状结构,该转盘状结构具有竖向旋转轴线。
在一个实施例中,至少一个食物处理装置选自但不限于以下装置中的一个或多个:
·一个或多个旋转圆形刀,该一个或多个旋转圆形刀配置成在屠体部分中执行预切割,
·锯,该锯用于将屠体部分锯切成更小的屠体部分,其中锯切能够在预切割位置处执行,
·用于对屠体部分的至少一部分进行去皮和/或去脂的装置。
在本发明的第二方面,提供了使用食物处理系统处理屠体部分的方法,其中食物处理系统包括:
·悬垂轨道系统,该悬垂轨道系统包括间隔开的多个钩环,该多个钩环设计用于承载屠体部分使得屠体部分至少部分地自由地悬挂,
·重新定位设备,该重新定位设备包括接合结构,该接合结构可以通过移动机构选择性地移动,以及
·至少一个食物处理装置,该至少一个食物处理装置用于在屠体部分被输送经过至少一个食物处理装置时在屠体部分上执行至少一个食物处理步骤,
其中,方法包括:以同步的方式移动间隔开的钩环和接合结构,以及在不同于钩环的承载位置的位置处由接合结构接合屠体部分并且将相对于竖向轴线的角位置从初始角位置调整到预定义角处理位置。在实行食物处理步骤的情况下,预定义角处理位置可以被调节用于后续的食物处理步骤,或者,换言之,在实行食物处理步骤的情况下,可以针对食物处理步骤对预定义角处理位置进行优化。
在一实施例中,接合结构在闭环路径中移动,该闭环路径具有竖向旋转轴线,其中同步的移动使得在接合区域处,接合结构相对于承载屠体部分的进来的钩环被定位在最佳位置处,从而允许接合结构与屠体部分的下侧部接合。在接合结构与屠体部分接合的情况下的屠体部分的初始角位置不同于在实行至少一个食物处理步骤的情况下的屠体部分的角位置。
在一实施例中,多个处理步骤由两个或更多个食物处理装置执行,其中,每个处理步骤具有相关联的预定义角处理位置,诸如平行于竖向轴线的竖向位置或者不平行于竖向轴线的任何角位置。
通常而言,本发明的各个方面在本发明的范围内可以以任何可能的方式组合和联合。本发明的这些方面、特征和/或优点和其他方面、特征和/或优点将从下文描述的实施例变得显而易见并且参考下文描述的实施例进行阐明。
附图说明
本发明的实施例将参考附图仅通过示例的方式进行描述,在该附
图中,
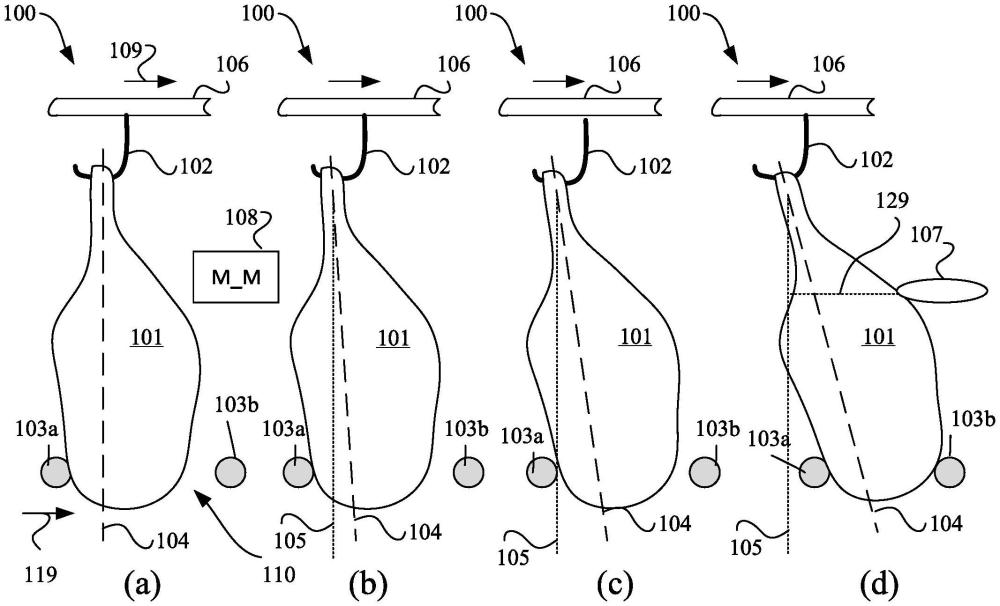
图1和图2以图形的方式描绘了根据本发明的系统的一个实施例。
具体实施方式
图1以图形的方式描绘了根据本发明的系统100,该系统100用于处理任何四足动物的屠体部分,诸如猪的半屠体、腿部部分、大腿后部和肩部部分。
系统包括悬垂轨道系统106,该悬垂轨道系统106包括间隔开的多个钩环102,该多个钩环102设计用于承载屠体部分101使得屠体部分至少部分地自由地悬挂。
系统还包括重新定位设备和至少一个食物处理装置107,该重新定位设备包括接合结构103,该接合结构103可以通过移动机构108选择性地移动,至少一个食物处理装置107用于在屠体部分在输送方向109上被输送经过该至少一个食物处理装置107时在屠体部分上执行至少一个食物处理步骤。
间隔开的多个钩环102和接合结构以同步的方式移动,如在图1
(a)中描绘,其中接合结构103与钩环102相配合并且在不同于钩环的承载位置的位置处与屠体部分101接合。
移动机构108配置成使接合结构103至少部分地平行于输送方向109在由箭头119指示的方向上,或者在与输送方向109相同或相反的方向上,和/或在相对于输送方向109形成角度的任何方向(未示出)上前进。
在这里示出的实施例中,接合结构包括第一支撑构件103a和第二支撑构件103b,其中支撑构件配置成与屠体部分的不同的侧部接合,如图所示。第一支撑构件103a相对于第二支撑构件103b和输送方向109定位在上游侧部上,其中第一支撑构件103a和第二支撑构件103b之间的初始距离超过屠体部分的支撑构件所接合处的部分的宽度。最初,上游支撑构件103a在屠体部分上提供一些压力,其中,在屠体部分的另一个侧部和第二支撑构件103b之间存在空间110。该空间足以允许第一支撑构件推到屠体部分上,并且将该屠体部分的纵向轴线104——如在图1a)至图1c)中示出——相对于竖向轴线105的角位置从初始角位置调整到预定义角处理位置,其中在实行食物处理步骤的情况下,针对食物处理步骤对预定义角处理位置进行优化。如这里示出,预定义角位置在图1d)中示出,其中屠体部分101被夹持在第一支撑构件和第二支撑构件之间。在该位置处,达到预定义角处理位置,并且可以一直达到该预定义角处理位置直到下一个处理步骤发生,例如其中通过绕圈的方式(或任何其他方式)沿着最佳切割路径129执行切割操作和/或锯切操作。
应当注意,接合结构103不应被解释为限制于两个支撑构件103a)、103b),而是该接合结构103还可以包括配置成与屠体部分接合并且将该屠体部分保持在稳定位置的任何部件,诸如借助于任何真空部件或者抽吸工具或者夹持件与屠体部分接合并且将该屠体部分保持在稳定位置的任何部件。
图2图示了图1的实施例,其中多个食物处理装置201-203按顺序被附加地利用来在屠体部分上执行不同的操作,诸如可以完全自动地、或者部分自动地、甚至部分手动地执行切割、去骨或去皮或去脂的操作,目的是使产量充分最大化和/或满足客户的偏好,例如如何对屠体部分进行切割、去皮和/或去脂。
感测装置210连接到控制装置211,该感测装置210诸如为激光扫描仪、相机或任何其他感测部件,该控制装置211控制移动机构108并且由此控制重新定位设备103,其中感测装置210配置成感测屠体部分的至少一个特性性能,并且其中控制装置211配置成基于感测到的至少一个特性性能来调度两个或更多个食物处理装置的处理顺序。由此,现在可以基于大小/形状/颜色/外观来相应地调整处理步骤。作为示例,这可以包括基于感测到的屠体部分的特性性能,仅对屠体部分的一个或多个特定侧部进行部分地去皮。作为示例,甚至可以将客户的订单要求用作决定该处理顺序的附加的参数。
调度后的处理顺序可以仅包括食物处理装置201至203中的一部分,其中该食物处理装置201至203中的一些可以不参与在处理顺序中并且被绕过。
如在该实施例中示出,控制装置211还可以配置成在处理步骤之间调整钩环的旋转轴线,例如在处理步骤202之前以逆时针204调整钩环的旋转轴线,以及在处理步骤203之前以顺时针205调整钩环的旋转轴线。由此,可以为下一个处理步骤自动地完全地对准屠体部分,并且由此提高了系统的灵活性。
虽然本发明已在附图和前面的描述中进行了详细的说明和描述,但这些说明和描述应被视为是说明性的或示例性的而非限制性的;本发明不限于所公开的实施例。通过对附图、公开内容和所附权利要求的研究,本领域技术人员在实践所要求保护的发明时可以理解和实现所公开的实施例的其他变体。在权利要求中,词语“包括”不排除其他元件或步骤,并且不定冠词“一(a)”或“一(an)”不排除复数。在相互不同的从属权利要求中引用的某些措施的事实并不表明这些措施的组合不能被有利地使用。