一种针对小龙虾加工的机械化脱壳装置和处理方法
文献发布时间:2024-01-17 01:21:27
本发明属于小龙虾加工领域,具体涉及一种针对小龙虾的机械化脱壳装置及其处理方法。
背景技术
小龙虾加工过程中仍存在较多的工序需要大量人力手工处理,特别是手工剥壳工序,这即增加了人工成本,又限制了加工效率和产量,小龙虾加工企业一直在寻求小龙虾的机械化脱壳技术,但目前小龙虾的机械化前处理技术依然十分薄弱,小龙虾机械化前处理的困难之处在于其形态特征、虾壳硬度等参数与对虾、沼虾等其他产业成熟虾类存在巨大差异,不能直接参考现有成熟虾类前处理技术。小龙虾加工产业需要开发一种适合小龙虾形态参数的新型机械化脱壳技术。
发明内容
本发明的目的在于克服现有技术中所述的缺陷,从而提供一种针对小龙虾加工的机械化脱壳装置和方法,本发明可以完成小龙虾去头工序后的小龙虾机械化脱壳工序,为进一步进行包装或机械化加工作业提供技术保障,具有较高的市场实际应用价值。
为了实现上述目的,本发明提供如下技术方案:
一种针对小龙虾加工的机械化脱壳装置,包括挤压输送装置、底部姿态定位装置、切割与脱壳装置、动力与控制装置。所述动力和控制装置用以控制装置运行并提供动力。
优选地,所述挤压输送装置包括纵向滚轴组和横向滚轴组。所述纵向滚轴组包括多对纵向滚轴,每两个纵向滚轴成对并列安装,所有纵向滚轴排成平行的两列,并列安装的两根纵向滚轴之间距离略小于小龙虾虾尾宽度;所述横向滚轴组由多个横向滚轴组成,横向滚轴位于纵向滚轴组中间,横向滚轴与底部姿态定位装置之间的距离略小于小龙虾虾尾的高度;所述纵向滚轴组和横向滚轴组均由动力和控制装置驱动下转动,沿小龙虾输送方向,小龙虾左侧纵向滚轴逆时针转动,小龙虾右侧纵向滚轴顺时针转动,横向滚轴逆时针转动。
优选地,所述底部姿态定位装置安装在纵向滚轴组的下方,由两根水平的圆轴以及安装在圆轴之间的辅助装置组成。沿小龙虾输送的方向,所述辅助装置依次为姿态调整装置、姿态固定平面以及旋转切刀凹槽,所述姿态调整装置由水平挡板和挡板上方多组弹性拉绳组成。
优选地,所述切割与脱壳装置由上下两个旋转切刀、一对粗糙滚轴以及三角脱壳器组成。沿小龙虾输送的方向,切割与脱壳装置位于纵向滚轴组的最后,所述粗糙滚轴与其他纵向滚轴的区别在于表面粗糙,与小龙虾虾壳接触时产生更大的摩擦力;所述上旋转切刀安装在横向滚轴的后方,下旋转切刀位于底部姿态定位装置的旋转切刀凹槽内,上下两个旋转切刀垂直排列,两刀之间距离略小于小龙虾虾尾高度。所述三角脱壳器为顶端开口的近似三角形形状,开口顶端延申出两个平行的长条片且末端做尖角处理,平行的尖端之间距离略小于小龙虾虾尾宽度,用于插入虾壳左右内测,三角脱壳器安装在上下两个旋转切刀的后方,一对粗糙滚轴中间。
一种针对小龙虾加工的机械化脱壳方法,包括以下步骤:
(1)在前期工序中分级并去头的小龙虾背部朝上,腹部朝下、尾部朝后进入挤压输送装置,并列安装的两根纵向滚轴之间距离略小于小龙虾虾尾宽度,小龙虾虾尾输送至两根纵向滚轴之间时产生水平方向的挤压力,虾壳水平挤压变形;随后小龙虾进入横向滚轴下方,横向滚轴到底部姿态定位装置之间的距离略小于小龙虾虾尾的高度,小龙虾收到垂直方向的挤压力,虾壳垂直挤压变形;随后小龙虾再次进入下组纵向滚轴之间,依次循环,小龙虾虾壳在水平和垂直方向上反复挤压变形,虾壳和虾肉的粘连受到破坏,小龙虾虾肉与虾壳的分离程度增加。
(2)在小龙虾进入挤压输送装置反复挤压的同时,小龙虾腹部朝下首先接触底部姿态定位装置中的弹性拉绳,小龙虾随着滚轴的转动向前输送,小龙虾弯曲的尾部钩住弹性拉绳,随着小龙虾的继续向前输送,小龙虾弯起的尾部被拉直,并进入姿态固定平面区域,在横向滚轴的压力下,小龙虾腹部与姿态固定平面紧贴,保持身体拉直的姿态进入切割与脱壳装置。
(3)小龙虾身体拉直姿态进入上下两个旋转切刀之间,上下虾壳被割开后,三角脱壳器尖端插入虾壳左右两侧内壁,虾壳沿三角脱壳器外缘向两侧移动,接触到转动的粗糙滚轴,在粗糙滚轴驱动下继续向两侧分开,直至壳肉完全脱离,虾壳掉落两侧,而虾肉在三角脱壳器中间掉落。
与现有技术相比,本发明具有以下有益效果:
(1)本发明可以完成小龙虾机械化脱壳工序,提高加工效率,为小龙虾机械化加工作业提供技术保障,具有较高的市场实际应用价值。
(2)本发明可以让小龙虾虾壳在水平和垂直方向上反复挤压变形,虾壳和虾肉的粘连受到破坏,增加了小龙虾虾肉与虾壳的分离程度。
(3)本发明中的底部姿态定位装置,可以调整并保持小龙虾身体拉直的姿态,增加虾壳切割效率。
(4)本发明中的切割与脱壳装置,三角形的脱壳器与粗糙滚轴形成巧妙配合,驱动切割后的壳肉分离。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
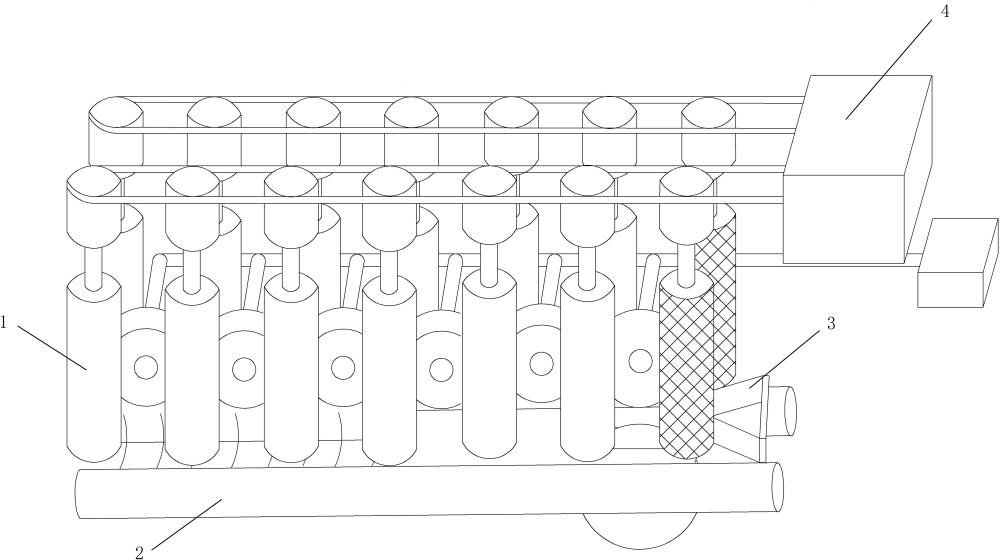
图1为本发明一种针对小龙虾加工的机械化脱壳装置的结构示意图;
图2为本发明实施例1中纵向和横向滚轴组合的结构示意图;
图3为本发明实施例1中底部姿态定位装置的结构示意图;
图4为本发明实施例1中姿态调整装置的侧视图;
图5为本发明实施例1中切割与脱壳装置的结构示意图;
图6为本发明实施例1中小龙虾脱壳步骤中虾壳反复挤压示意图;
图7为本发明实施例1中小龙虾脱壳步骤中姿态调整和保持示意图;
图8为本发明实施例1中小龙虾脱壳步骤中虾壳脱离示意图;
附图标记说明:挤压输送装置1、底部姿态定位装置2、切割与脱壳装置3、动力和控制装置4、纵向滚轴5、横向滚轴6、水平圆轴7、姿态调整装置8、姿态固定平面9、旋转切刀凹槽10、水平挡板11、弹性拉绳12、上旋转切刀13、下旋转切刀14、粗糙滚轴15、三角脱壳器16。
实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例
如图1-图5所示:一种针对小龙虾加工的机械化脱壳装置,包括挤压输送装置1、底部姿态定位装置2、切割与脱壳装置3、动力与控制装置4。所述动力和控制装置4用以控制装置运行并提供动力。
所述挤压输送装置1包括纵向滚轴组和横向滚轴组。所述纵向滚轴组包括多对纵向滚轴5,每两个纵向滚轴5成对并列安装,所有纵向滚轴5排成平行的两列,并列安装的两根纵向滚轴5之间距离略小于小龙虾虾尾宽度;所述横向滚轴组由多个横向滚轴6组成,横向滚轴6位于纵向滚轴组中间,横向滚轴6与底部姿态定位装置2之间的距离略小于小龙虾虾尾的高度;所述纵向滚轴组和横向滚轴组均由动力和控制装置4驱动下转动,沿小龙虾输送方向,小龙虾左侧纵向滚轴5逆时针转动,小龙虾右侧纵向滚轴5顺时针转动,横向滚轴6逆时针转动。
优选地,所述底部姿态定位装置2安装在纵向滚轴组的下方,由两根水平圆轴7以及安装在圆轴之间的辅助装置组成。沿小龙虾输送的方向,所述辅助装置依次为姿态调整装置8、姿态固定平面9以及旋转切刀凹槽10,所述姿态调整装置由水平挡板11和挡板上方多组弹性拉绳12组成。
优选地,所述切割与脱壳装置由上旋转切刀13、下旋转切刀14、一对粗糙滚轴15以及三角脱壳器16组成。沿小龙虾输送的方向,切割与脱壳装置3位于纵向滚轴组的最后,所述粗糙滚轴15与其他纵向滚轴5的区别在于表面粗糙,与小龙虾虾壳接触时产生更大的摩擦力;所述上旋转切刀13安装在横向滚轴6的后方,下旋转切刀14位于底部姿态定位装置2的旋转切刀凹槽10内,上下两个旋转切刀垂直排列,两刀之间距离略小于小龙虾虾尾高度。所述三角脱壳器16为顶端开口的近似三角形形状,开口顶端延申出两个平行的长条片且末端做尖角处理,平行的尖端之间距离略小于小龙虾虾尾宽度,用于插入虾壳左右内测,三角脱壳器16安装在上下两个旋转切刀的后方,一对粗糙滚轴15中间。
如图6-图8所示,一种针对小龙虾加工的机械化脱壳方法,包括以下步骤:
(1)在前期工序中分级并去头的小龙虾背部朝上,腹部朝下、尾部朝后进入挤压输送装置1,并列安装的两根纵向滚轴5之间距离略小于小龙虾虾尾宽度,小龙虾虾尾输送至两根纵向滚轴5之间时产生水平方向的挤压力,虾壳水平挤压变形;随后小龙虾进入横向滚轴6下方,横向滚轴6到底部姿态定位装置2之间的距离略小于小龙虾虾尾的高度,小龙虾收到垂直方向的挤压力,虾壳垂直挤压变形;随后小龙虾再次进入下组纵向滚轴5之间,依次循环,小龙虾虾壳在水平和垂直方向上反复挤压变形,虾壳和虾肉的粘连受到破坏,小龙虾虾肉与虾壳的分离程度增加。
(2)在小龙虾进入挤压输送装置1反复挤压的同时,小龙虾腹部朝下首先接触底部姿态定位装置2中的弹性拉绳12,小龙虾随着滚轴的转动向前输送,小龙虾弯曲的尾部钩住弹性拉绳12,随着小龙虾的继续向前输送,小龙虾弯起的尾部被拉直,并进入姿态固定平面9区域,在横向滚轴6的压力下,小龙虾腹部与姿态固定平面9紧贴,保持身体拉直的姿态进入切割与脱壳装置3。
(3)小龙虾身体拉直姿态进入上下两个旋转切刀之间,上下虾壳被割开后,三角脱壳器16尖端插入虾壳左右两侧内壁,虾壳沿三角脱壳器16外缘向两侧移动,接触到转动的粗糙滚轴15,在粗糙滚轴15驱动下继续向两侧分开,直至壳肉完全脱离,虾壳掉落两侧,而虾肉在三角脱壳器16中间掉落。
以上所述仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。