基于3D结构光的人脸识别方法及装置
文献发布时间:2023-06-19 09:24:30
技术领域
本发明属于人脸识别技术领域,特别涉及一种基于3D结构光的人脸识别方法及装置。
背景技术
3D结构光人脸识别技术广泛的应用在物联网、移动互联网、银行、安防、交通等各个需要人脸识别场景,该技术更好的提升了攻击预防效果,全面提升人脸识别准确度,结合相关算法,能够在一千万分之一误识率下达到99%以上的准确率,并具有较高的安全性。
3D结构光人脸识别技术进行成像时,通过2D摄像头拍摄2D照片,通过红外点阵模组发射经过特殊调制的不可见红外光至拍摄物体,再通过红外接收模组接收由被拍摄物体反射回来的不可见红外光,通过计算获取被拍摄物体的空间信息。然后将2D图像数据和3D图像数据采用算法进行融合,然后得到3D人脸信息。但是2D图像数据和3D图像数据在进行融合时,因2D图像数据和3D图像数据在空间上的差异,导致融合后的人脸3D图像的人脸特征存在细微的误差。
发明内容
本发明的目的在于提供一种基于3D结构光的人脸识别方法及装置,从而克服因2D图像数据和3D图像数据在空间上的差异,导致融合后的人脸3D图像的人脸特征存在细微的误差的缺点。
为实现上述目的,一方面,本发明提供了一种基于3D结构光的人脸识别方法,具体包括:
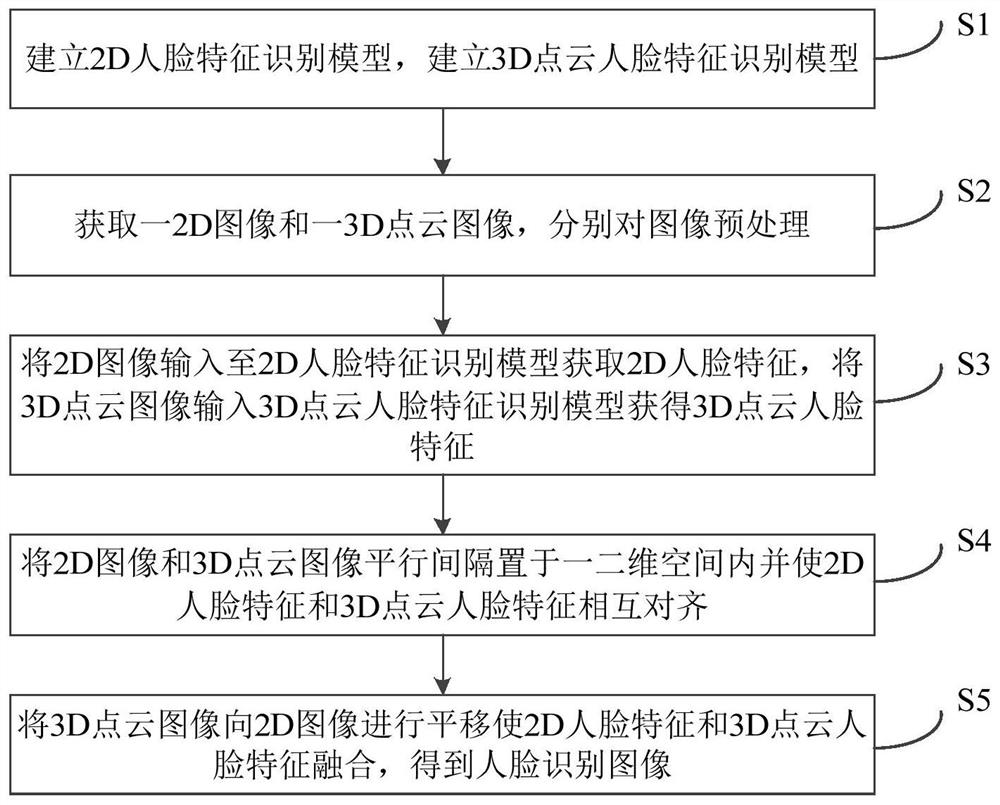
建立2D人脸特征识别模型,建立3D点云人脸特征识别模型;
获取一2D图像和一3D点云图像,分别对图像预处理;
将所述2D图像输入至所述2D人脸特征识别模型获取2D人脸特征,将所述3D点云图像输入所述3D点云人脸特征识别模型获得3D点云人脸特征;
将所述2D图像和3D点云图像平行间隔置于一二维空间内并使所述2D人脸特征和3D点云人脸特征相互对齐;
将3D点云图像向所述2D图像进行平移使所述2D人脸特征和3D点云人脸特征融合,得到人脸识别图像。
优选的,上述技术方案中,建立2D人脸特征识别模型具体步骤包括:
采集多张待识别的2D图像,对所述2D图像的2D人脸特征进行标识,将标识后的多张待识别的2D图像输入至卷积神经网络进行识别训练,以获得能够预测所述2D图像的2D人脸特征卷积神经网络。
优选的,上述技术方案中,建立3D点云人脸特征识别模型具体步骤包括:
采集多张待识别的3D点云图像,对所述3D点云图像的3D人脸特征进行标识,将标识后的多张待识别的3D点云图像输入至卷积神经网络进行识别训练,以获得能够预测所述3D点云图像的3D点云人脸特征卷积神经网络。
优选的,上述技术方案中,所述3D点云图像预处理为采用高斯滤波核对所述3D点云图像进行平滑滤波,得到预处理后的3D图像。
优选的,上述技术方案中,所述2D人脸特征和3D点云人脸特征包括嘴巴特征、鼻子特征、眼睛特征及耳朵特征。
优选的,上述技术方案中,所述2D图像预处理包括:将图像进行对比度增强,对图像进行灰度值转化,利用高斯滤波器对灰度值转化后的图像进行降噪。
为实现上述目的,另一方面,本发明提供了一种基于3D结构光的人脸识别装置,包括2D摄像模块、3D摄像模块及处理器,所述处理器包括2D人脸识别模块、3D点云人脸识别模块、预处理模块、输入输出模块、对齐模块及融合模块;
2D人脸识别模块用于建立2D人脸特征识别模型;
3D点云人脸识别模块用于建立3D点云人脸特征识别模型;
2D摄像模块用于获取一2D图像;
3D摄像模块用于获取一3D点云图像;
预处理模块用于对2D图像和3D点云图像进行预处理;
输入输出模块用于将所述2D图像输入至所述2D人脸特征识别模型获取2D人脸特征,将所述3D点云图像输入所述3D点云人脸特征识别模型获得3D点云人脸特征;
对齐模块用于将所述2D图像和3D点云图像平行间隔置于一二维空间内并使所述2D人脸特征和3D点云人脸特征相互对齐;
融合模块用于将3D点云图像向所述2D图像进行平移使所述2D人脸特征和3D点云人脸特征融合,得到人脸识别图像。
优选的,上述技术方案中,还包括壳体、升降座、红外感应器、行程开关及电机,所述壳体内设有容置腔,所述壳体设有一与所述容置腔连通的开口端,所述升降座设有摄像侧和相对所述摄像侧的安装侧,所述安装侧的上端设有一转动轴,所述升降座置于所述开口端内且所述转动轴可转动地设于所述开口端的内壁,所述电机用于驱动所述转动轴转动,所述行程开关设于所述转动轴下方的所述开口端的内壁上;所述2D摄像模块和3D摄像模块安装于所述摄像侧;所述2D摄像模块、3D摄像模块、红外感应器、行程开关及电机均与所述处理器连接;
其中,初始状态时,所述2D摄像模块和3D摄像模块位于所述开口端内,所述安装侧的下端抵于所述行程开关的触点上使得断开;当所述红外感应器感应到有人靠近时,所述处理器控制所述电机转动以驱动所述升降座的摄像侧远离所述开口端,且所述安装侧的下端远离所述行程开关的触点使其闭合,所述处理器启动所述2D摄像模块和3D摄像模块;当所述红外感应器感应人已经远离,则发信号至所述处理器控制所述电机驱动所述升降座使所述摄像侧位于开口端内,同时使所述安装侧的下端抵于所述行程开关的触点上使得断开以开闭所述2D摄像模块和3D摄像模块。
优选的,上述技术方案中,还包括除湿壳体、湿度传感器、风扇、散热片、半导体制冷片、冷却片及接水槽;所述除湿壳体和湿度传感器设于所述壳体内,所述风扇、散热片、半导体制冷片及冷却片以依次贴合的方式设置于所述除湿壳体内,所述冷却片对应半导体制冷片的冷端,所述散热片对应半导体制冷片的热端,所述风扇、湿度传感器和半导体制冷片分别与所述处理器连接,所述风扇的吸风口对应的所述除湿壳体位置开设有进风口,所述风扇的出风方向对应的所述除湿壳体位置开设有出风口,所述出风口通过管路延伸至所述壳体外;所述接水槽设于所述冷却片上的水滴下落的位置上,该接水槽的出水口延伸至所述壳体的外部。
优选的,上述技术方案中,所述3D摄像模块包括红外点阵模组及红外点阵接收模组。
与现有的技术相比,本发明具有如下有益效果:
1.本发明中的基于3D结构光的人脸识别方法,首先通过神经网络识别出2D图像和3D点云图像的人脸特征数据,然后将2D图像和3D点云图像上的人脸特征数据进行对齐操作后再进行融合,将两幅图像上的人脸特征对齐后,可以避免两幅图像在融合过程中对应人脸特征的对齐偏差,因此不仅提高了融合的速率,并且提高了融合的精度。
2.因灰尘等物质对红外光产生干扰,因此本发明为提高光照质量,采用可升降的方式,即使用时将2D摄像模块和3D摄像模块升起,不使用时将两者降下,避免灰尘的干扰,提升图像质量。
3.若镜头方面存在水雾,则会使红外光线产生折射,使得所拍摄的图像质量较差,因此,本发明引入了除湿干燥装置,当湿度达到一定程度时启动除湿干燥装置,保持装置内处于干燥状态,以提高图像拍摄质量。
附图说明
图1是本发明基于3D结构光的人脸识别方法的流程示意图。
图2是本发明基于NIN网络结构示意图。
图3是本发明基于3D结构光的人脸识别装置的原理示意图。
图4是本发明基于3D结构光的人脸识别装置的结构图。
图5是本发明基于3D结构光的人脸识别装置的局部结构图。
其中,1-壳体,2-升降座,3-转动轴,4-2D摄像模块和3D摄像模块,5-行程开关,6-红外感应器,7-除湿壳体,8-半导体制冷片,9-散热片,10-冷却片,11-风扇,12-进风口,13-出风口,14-接水槽,15-湿度传感器。
具体实施方式
下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
如图1所示,本实施例公开了一种基于3D结构光的人脸识别方法,具体包括:
步骤S1,建立2D人脸特征识别模型,建立3D点云人脸特征识别模型,2D人脸特征和3D点云人脸特征包括嘴巴特征、鼻子特征、眼睛特征及耳朵特征。通过对上述特征进行深度学习,使得能够对2D图像和3D图像进行特征识别。
步骤S2,获取一2D图像和一3D点云图像,分别对图像预处理,其中,3D点云图像预处理为采用高斯滤波核对所述3D点云图像进行平滑滤波,得到预处理后的3D图像。2D图像预处理包括:将图像进行对比度增强,对图像进行灰度值转化,利用高斯滤波器对灰度值转化后的图像进行降噪。
步骤S3,将2D图像输入至2D人脸特征识别模型获取2D人脸特征,将3D点云图像输入3D点云人脸特征识别模型获得3D点云人脸特征。即识别出2D图像和3D点云图像中的嘴巴特征、鼻子特征、眼睛特征及耳朵特征特征。
步骤S4,将2D图像和3D点云图像平行间隔置于一二维空间内并使2D人脸特征和3D点云人脸特征相互对齐。首先建立一二维坐标系(x,y),将2D图像和3D点云图像的人脸图像缩放至对应大小,并使2D人脸特征和3D点云人脸特征对应,然后通过平移算法将3D点云图像平移往2D图像平移。
步骤S5,将3D点云图像向2D图像进行平移使2D人脸特征和3D点云人脸特征融合,得到人脸识别图像。
具体地,步骤S1中建立2D人脸特征识别模型具体步骤包括:
采集多张待识别的2D图像,对2D图像的2D人脸特征进行标识,即嘴巴特征、鼻子特征、眼睛特征及耳朵特征,将标识后的多张待识别的2D图像输入至卷积神经网络进行识别训练,以获得能够预测所述2D图像的2D人脸特征卷积神经网络。
具体地,步骤S1中建立3D点云人脸特征识别模型具体步骤包括:
采集多张待识别的3D点云图像,对3D点云图像的3D人脸特征进行标识,即嘴巴特征、鼻子特征、眼睛特征及耳朵特征,将标识后的多张待识别的3D点云图像输入至卷积神经网络进行识别训练,以获得能够预测3D点云图像的3D点云人脸特征卷积神经网络。
可以理解,卷积神经网络选用基于NIN网络结构的多层感知卷积神经网络模型,基于NIN网络结构构建深度学习模型,NIN的整体结构是由多个多层感知卷积层(Mlpconv)和一个全连接层组成。其中,每个Mlpconv是由多层感知机的微网络结构对每个局部感受野的卷积运算,由一层卷积和两层感知层组成;在最后一层Mlpconv后加入全连接层,并通过线性回归的方法实现图片目标物的识别输出。如图2所示,本发明实施例提供一种深度学习模型网络架构包括:
输入层:输入图像尺寸为32x32x3的数据集。
第一个Mlpconv层:卷积核设置为3x3x3的大小16个,感知器通过1x1卷积实现,分别为1x1x16和1x1x32,最后通过池化层降维处理;
第二个Mlpconv层:卷积核设置为3x3x16的大小32个,感知器通过1x1卷积实现,分别为1x1x32和1x1x32,最后通过池化层降维处理;
第三个Mlpconv层:卷积核设置为3x3x32的大小64个,感知器通过1x1卷积实现,分别为1x1x64和1x1x64,最后通过池化层降维处理;
第四个Mlpconv层:卷积核设置为3x3x64的大小128个,感知器通过1x1卷积实现,分别为1x1x128和1x1x128,最后通过池化层降维处理;
全连接层:通过卷积层和池化层输出的图片具有比较高层的特征,将二维的feature map通过全连接层将其映射到一维空间,设置20x1的全连接参数,通过线性回归的方法,将其输出为图片特征检测值,使用Leaky-Relu函数进行非线性激活,同时使用L1正则化处理。
该实施例中,如图3所示,还公开一种基于3D结构光的人脸识别装置,包括2D摄像模块、3D摄像模块及处理器,处理器包括2D人脸识别模块、3D点云人脸识别模块、预处理模块、输入输出模块、对齐模块及融合模块。
2D人脸识别模块用于建立2D人脸特征识别模型。
3D点云人脸识别模块用于建立3D点云人脸特征识别模型。
2D摄像模块用于获取一2D图像。
3D摄像模块用于获取一3D点云图像,3D摄像模块包括红外点阵模组及红外点阵接收模组。
预处理模块用于对2D图像和3D点云图像进行预处理。
输入输出模块用于将2D图像输入至2D人脸特征识别模型获取2D人脸特征,将3D点云图像输入3D点云人脸特征识别模型获得3D点云人脸特征。
对齐模块用于将2D图像和3D点云图像平行间隔置于一二维空间内并使2D人脸特征和3D点云人脸特征相互对齐。
融合模块用于将3D点云图像向2D图像进行平移使2D人脸特征和3D点云人脸特征融合,得到人脸识别图像。
进一步的,如图4和图5所示,还包括壳体1、升降座2、红外感应器6、行程开关5及电机,壳体1内设有容置腔,壳体1设有一与容置腔连通的开口端,升降座2设有摄像侧和相对摄像侧的安装侧,安装侧的上端设有一转动轴3,升降座2置于开口端内且转动轴3可转动地设于开口端的内壁,电机用于驱动转动轴3转动,行程开关5设于转动轴3下方的开口端的内壁上;2D摄像模块和3D摄像模块4安装于摄像侧;2D摄像模块、3D摄像模块、红外感应器6、行程开关5及电机3均与处理器连接;
其中,初始状态时,2D摄像模块和3D摄像模块4位于开口端内,安装侧的下端抵于行程开关5的触点上使得断开;当红外感应器感6应到有人靠近时,处理器控制电机转动以驱动升降座2的摄像侧远离开口端,且安装侧的下端远离行程开关5的触点使其闭合,处理器启动2D摄像模块和3D摄像模块4;当红外感应器6感应人已经远离,则发信号至处理器控制电机驱动升降座4使所述摄像侧位于开口端内,同时使安装侧的下端抵于行程开关5的触点上使得断开以开闭2D摄像模块和3D摄像模块4。采用可升降的方式,即使用时将2D摄像模块和3D摄像模块升起,不使用时将两者降下,避免灰尘的干扰,提升图像质量。
进一步的,如图4和图5所示,还包括除湿壳体7、湿度传感器15、风扇11、散热片9、半导体制冷片8、冷却片10及接水槽14;除湿壳体7和湿度传感器15设于壳体1内,风扇11、散热片9、半导体制冷片8及冷却片10以依次贴合的方式设置于除湿壳体7内,冷却片10对应半导体制冷片8的冷端,散热片9对应半导体制冷片8的热端,风扇11、湿度传感器15和半导体制冷片8分别与处理器连接,风扇11的吸风口对应的除湿壳体7位置开设有进风口12,风扇11的出风方向对应的除湿壳体7位置开设有出风口13,出风口13通过管路延伸至壳体1外;接水槽14设于冷却片10上的水滴下落的位置上,该接水槽14的出水口延伸至壳体1的外部。
工作时,引用温差大易凝露的特点,湿度传感器15检测高于一定值时启动,通过进风口12吸入空气,利用半导体制冷片8同时产生热端和冷端,在与冷端连接的冷却片10的凝水面产生非常低的温度,当空气与冷却片10接触后,使空气中的水分凝结在冷却片10上,然后通过接水槽14排走,进行排湿后的气流最终从出风口13排出,由于壳体1内空气中的湿度显著下降,这样即使外部环境温度大幅降低,也不会再产生凝露,根本上解决了壳体的湿度问题。
前述对本发明的具体示例性实施方案的描述是为了说明和例证的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本发明的各种不同的示例性实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求书及其等同形式所限定。
- 基于3D结构光的人脸识别方法及装置
- 一种基于结构光摄像头的3D人脸识别方法