一种基于无人平台作业的智能控制系统及控制方法
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及一种基于无人平台作业的智能控制系统及控制方法,属于人工智能技术领域。
背景技术
随着科技的发展与进步,先进的AI人工智能技术领域促进了无人船,水中机器人,无人飞行器等各种无人载具的高速发展。相关技术的应用,比如无人船水质自动检测,无人机航拍,水下机器人油井作业也日渐广泛。
然而无人载具在复杂的实际环境中应用存在一个普遍的收放部署问题,要么无法适应大多数气象环境,要么需要投入大量的人力参与部署调试以及维护等工作,无法完成大规模经济适用的无人作业。以传统渔民在海上展开渔情探测及捕捞作业为例, 渔民需亲自开着船带着捕捞渔具,天气不好可能会遇到大风大浪,天气好又要顶着太阳暴晒,作业环境不仅辛苦而且危险。一种可行的解决方案是通过无人船搭载自主水下航行器AUV(Automated Underwater Vehicle)或者其他负载的方法,可替代人工在各种复杂环境下实现渔情探测及捕捞作业。
发明内容
本发明为了解决现有技术中存在的上述缺陷和不足,提供了一种基于无人平台作业的智能控制系统及控制方法。
为解决上述技术问题,本发明提供一种基于无人平台作业的智能控制系统,包括智能中控系统、数据链系统、定位系统、导航系统、负载系统和收放系统;
所述智能中控系统包括数据显示模块、智能控制模块和数据分析模块;所述数据显示模块用于实时显示地图、任务导航信息、监控上述各系统的运行情况、以及收集无人平台和负载系统发送的声纳、视频、雷达和环境感知信息;所述智能控制模块,通过控制收放系统来控制无人平台与负载系统之间的自动收放;所述数据分析模块,对负载系统采集到的数据进行实时分析,并将分析结果同步至数据显示模块;所述数据链系统,用于智能中控系统、定位系统、导航系统、负载系统以及收放系统相互之间的通信;所述定位系统,用于定位任务坐标,并实时定位无人平台和负载系统的位置信息;所述导航系统,确定任务目标后,根据环境信息,确定无人平台和负载系统到达任务坐标点的运行航线;所述收放系统,负载在无人平台上并与负载系统相匹配,用于将负载系统从无人平台上进行释放和归位。
进一步,所述数据链系统包括加密层、压缩层和通信层;所述加密层采用非对称密钥的方式进行端对端加密;所述压缩层,利用有损变换编解码或预测编解码的方法对数据进行保真压缩;所述通信层,智能中控系统、定位系统、导航系统、负载系统以及收放系统之间的通信数据通过加密和压缩后,通过通信层进行传输。
进一步,所述定位系统包括无线电定位模块、声纳定位模块和自主定位模块;无线电定位模块接收卫星或基站发送的无线电波进行定位;在无法使用无线电定位的介质中,利用声纳定位模块完成多普勒或差分分米级别的定位;无线电定位和声纳定位均无法实施时,自主定位模块通过惯性测量仪和指南针完成自主惯性定位、通过摄像头完成视觉定位。
进一步,所述导航系统包括由激光雷达、摄像头、毫米波雷达、超声波雷达和全球导航卫星系统/惯性测量仪组成的环境信息采集模块、存储在智能中控系统或负载系统上并结合环境信息采集模块实时生产的协同模块、以及通过融合环境信息和协同模块数据来稳定无人平台和负载系统实现收放作业时无人平台航线的航线维持模块。
进一步,所述负载系统分为空中、水面和水下三种,包括负载模块和收放子模块,所述收放系统对应负载系统的类型,包括收放母模块。
另外,本发明还提供了上述的基于无人平台作业的智能控制系统的控制方法,包括以下步骤:
S1通过定位系统定位目标任务的坐标,然后由智能中控系统向无人平台发送执行任务指令,无人平台启动自身的导航系统自动航行至指定的任务坐标点,智能中控系统的智能控制模块通过收放系统将负载系统从无人平台上释放,负载系统进行作业;
S2负载系统作业过程中,持续通过数据链系统将数据发送给智能中控系统,智能中控系统的数据分析模块对负载系统采集到的数据进行实时分析,并将分析结果同步至数据显示模块,同时,数据显示模块实时显示地图、任务导航信息、监控上述各系统的运行情况、以及收集无人平台和负载系统发送的声纳、视频、雷达和环境感知信息;
S3负载系统完成任务后,通过数据链系统向智能中控系统报告位置信息,智能控制模块利用定位系统共享无人平台和负载系统的位置信息,控制无人平台和负载系统航行至对接区域,然后负载系统通过自身的收放子模块与无人平台上的收放母模块进行对接,完成负载系统的收回工作;
S4负载系统收回后,无人平台利用导航系统返航。
本发明所达到的有益技术效果:本发明提供的一种基于无人平台作业的智能控制系统和控制方法,可以代替人工在各种负载的环境里实现探测和作业,并自动完成负载系统和无人平台的收放工作,具体过程如下:通过定位系统定位目标任务的坐标,然后由智能中控系统向无人平台发送执行任务指令,无人平台启动自身的导航系统自动航行至指定的任务坐标点,智能中控系统的智能控制模块通过收放系统将负载系统从无人平台上释放,负载系统进行作业;负载系统作业过程中,持续通过数据链系统将数据发送给智能中控系统,智能中控系统的数据分析模块对负载系统采集到的数据进行实时分析,并将分析结果同步至数据显示模块,同时,数据显示模块实时显示地图、任务导航信息、监控上述各系统的运行情况、以及收集无人平台和负载系统发送的声纳、视频、雷达和环境感知信息;负载系统完成任务后,通过数据链系统向智能中控系统报告位置信息,智能控制模块利用定位系统共享无人平台和负载系统的位置信息,控制无人平台和负载系统航行至对接区域,然后负载系统通过自身的收放子模块与无人平台上的收放母模块进行对接,完成负载系统的收回工作;负载系统收回后,无人平台利用导航系统返航;。
附图说明
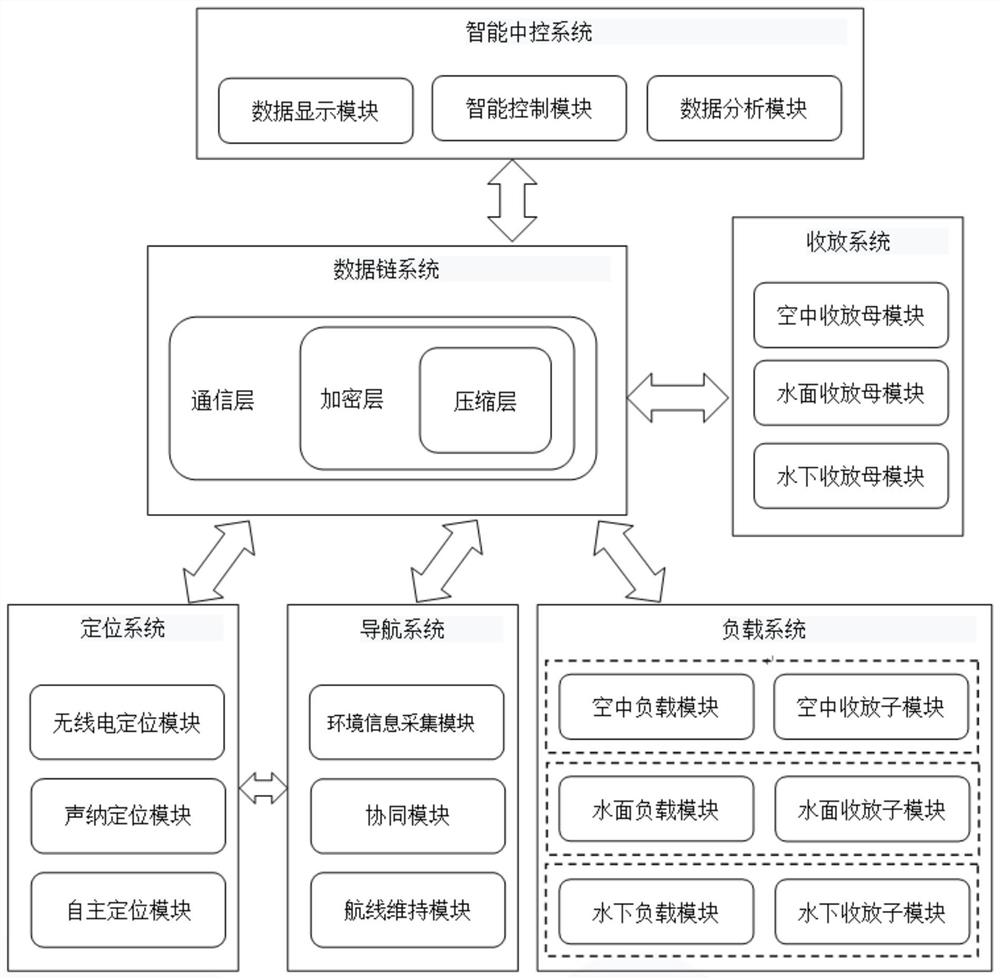
图1本发明之基于无人平台作业的智能控制系统组成框图;
图2本发明之实施例中无人作业控制系统组成框图。
具体实施方式
下面结合具体实施例对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
下面结合附图和实施例对本发明专利进一步说明。
如图1所示,本发明提供一种基于无人平台作业的智能控制系统,包括智能中控系统、数据链系统、定位系统、导航系统、负载系统和收放系统;
所述智能中控系统包括数据显示模块、智能控制模块和数据分析模块;所述数据显示模块用于实时显示地图、任务导航信息、监控上述各系统的运行情况、以及收集无人平台和负载系统发送的声纳、视频、雷达和环境感知信息;所述智能控制模块,通过控制收放系统来控制无人平台与负载系统之间的自动收放,可以实现不同自动化程度的收放自动,自动化程度分为以下等级:
L0:操作员需完全掌控收放过程,无任何自动化能力;
L1:智能中控系统可以辅助操作员完成部分收放任务,比如自动到达收放点;
L2:智能中控系统能够完成部分收放任务,比如自动抓取负载系统;但操作员需要监控作业环境,完成剩余部分,同时保证出现问题,随时进行接管;
L3:智能中控系统既能完成收放任务,并在某些情况下监控收放环境,但作业员必须准备好重新取得收放控制权;
L4:智能中控系统在特定环境和特定条件下,能够自主完成收放任务并监控收放环境,能避免极端情况下人工介入的作业安全;
L5:智能中控系统自主完成的所有收放任务。
所述数据分析模块,对负载系统采集到的数据进行实时分析,并将分析结果同步至数据显示模块;
所述数据链系统,用于智能中控系统、定位系统、导航系统、负载系统以及收放系统相互之间的通信;包括加密层、压缩层和通信层;所述加密层采用非对称密钥的方式进行端对端加密,使用一对非对称密钥,一个用于加密,另一个用于解密,加密的密钥称为私钥,解密的密钥称为公钥;所述压缩层,利用有损/无损变换编解码或预测编解码的方法对数据进行保真压缩,从而保证指数增长的数据的时效性和实用性;所述通信层,智能中控系统、定位系统、导航系统、负载系统以及收放系统之间的通信数据通过加密和压缩后,通过通信层进行传输;通过融合高低频声纳、无线电波、激光雷达和线缆组成的有线/无线通信方法,提升数据通信的吞吐量,保证极端情况下数据的可靠性和成本的最优化。
所述定位系统,用于定位任务坐标,并实时定位无人平台和负载系统的位置信息;包括无线电定位模块、声纳定位模块和自主定位模块;无线电定位模块接收卫星或基站发送的无线电波进行定位,一般情况下用于水面和空中的定位,可以达到厘米级的高精度定位;在无法使用无线电定位的介质中,比如水中,利用声纳定位模块完成多普勒或差分分米级别的定位;无线电定位和声纳定位均无法实施时,自主定位模块通过惯性测量仪和指南针完成自主惯性定位、通过摄像头完成视觉定位。
所述导航系统,确定任务目标后,根据环境信息,确定无人平台和负载系统到达任务坐标点的运行航线;包括由激光雷达、摄像头、毫米波雷达、超声波雷达和全球导航卫星系统/惯性测量仪组成的环境信息采集模块、存储在智能中控系统或负载系统上并结合环境信息采集模块实时生产的协同模块、以及通过融合环境信息和协同模块数据来稳定无人平台和负载系统实现收放作业时无人平台航线的航线维持模块。环境信息采集模块,可以收集覆盖10公里到10厘米距离的各种气象及交互信息;协同模块,由卫星遥感产生或海底声纳阵列扫描,也可以由SLAM算法结合环境信息采集模块的各种传感器实时生成、并储存在智能中控系统或负载系统上的高精度全局三维地形图;该模块通过数据链系统将于智能中控系统通信,对全局信息进行定期更新,步入增加/修正高精度地形图、气象信息、各个系统的运行情况等;
为了适应空中、水面和水下不同环境的需求,所述负载系统分为空中、水面和水下三种形式,则相应地,负载系统分别分为空中负载模块和空中收放子模块、水面负载模块和水面收放子模块、以及水下负载模块和水下收放子模块;所述收放系统,负载在无人平台上,用于将负载系统从无人平台上进行释放和归位;与不同类型的负载系统相匹配,所述收放系统对应负载系统的类型,分为空中收放母模块、水面收放母模块、以及水下收放母模块。具体实施例方式如图2所示,空中负载模块为空中无人机,水面负载模块水面漂浮的浮标,水下负载模块为水下自主机器人,无人平台为无人船。
另外,本发明还提供了上述的基于无人平台作业的智能控制系统的控制方法,包括以下步骤:
S1通过定位系统定位目标任务的坐标,然后由智能中控系统向无人平台发送执行任务指令,无人平台启动自身的导航系统自动航行至指定的任务坐标点,智能中控系统的智能控制模块通过收放系统将负载系统从无人平台上释放,负载系统进行作业;
S2负载系统作业过程中,持续通过数据链系统将数据发送给智能中控系统,智能中控系统的数据分析模块对负载系统采集到的数据进行实时分析,并将分析结果同步至数据显示模块,同时,数据显示模块实时显示地图、任务导航信息、监控上述各系统的运行情况、以及收集无人平台和负载系统发送的声纳、视频、雷达和环境感知信息;
S3负载系统完成任务后,通过数据链系统向智能中控系统报告位置信息,智能控制模块利用定位系统共享无人平台和负载系统的位置信息,控制无人平台和负载系统航行至对接区域,然后负载系统通过自身的收放子模块与无人平台上的收放母模块进行对接,完成负载系统的收回工作;
S4负载系统收回后,无人平台利用导航系统返航。
为了更好的说明本发明提供的控制方法,先以一个典型的作业流程进行说明:
无人船(USV)作为一种常见的海上无人平台,在船尾的结构上部署了一个水下收放母模块,水下收放母模块的子端连接水下负载模块,一台AUV(自主水中机器人)。
当无人船在接收到由智能中控系统发出的出海任务时,无人船启动导航系统自动航行到指定任务坐标。到达任务目标点后,无人船触发水下收放系统释放AUV,AUV自主下潜完成预定作业并持续通过数据链系统与智能中控系统同步信息。
AUV完成作业任务后,通过数据链系统报告位置信息,智能中控系统的智能控制模块通过预先设定的自动级别辅助操作员或者全自动协调无人平台和AUV的回收工作,具体为:通过定位系统共享的位置信息,AUV和无人船上的导航系统将驱使各自到达最适合对接的位置区域。此时由AUV通过自身动力微调并通过自带的水下收放子模块与无人船的水下收放母模块对接,而后无人船自主导航系统按照原定任务航线返回,完成一次收放作业。
以上已以较佳实施例公布了本发明,然其并非用以限制本发明,凡采取等同替换或等效变换的方案所获得的技术方案,均落在本发明的保护范围内。
- 一种基于无人平台作业的智能控制系统及控制方法
- 一种高空作业平台智能行走控制系统及其控制方法