一种非匀速传动的水稻大苗栽植机构及栽植装置
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及农业机械技术领域,特别是涉及一种非匀速传动的水稻大苗栽植机构及栽植装置。
背景技术
我国南方水稻主产区多为多熟制种植,与国外一年一熟制种植模式相比季节茬口十分紧张,生产中迫切需求水稻长秧龄大苗机插,以适当延长水稻秧龄、缩短大田生育期。
现有的水稻高速插秧机栽植机构通过非圆齿轮行星轮系实现所需的栽植轨迹,主要适用于毯状中小苗移栽,栽植轨迹适应苗高范围一般为10-20cm之间,直接用于移栽超过苗高范围的水稻大苗时,容易因栽植轨迹无法绕过栽插入土的秧苗而将秧苗推倒,进而造成“搭桥、推秧、伤秧”等问题。
现有栽植机构的栽植轨迹无法适应大苗,主要原因在于:秧爪取苗并将秧苗栽入土壤中之后,需要绕过的秧苗高度,并行进至秧箱的秧门处进入下一次的取苗、栽植循环。当栽植的秧苗过高时,秧爪无法完全绕过秧苗高度,必须扫过秧苗的一部分才能行进至秧门,进而容易出现将秧苗推倒的现象。
如附图1所示为现有的水稻插秧机栽植机构,其采用基于椭圆齿轮或其他非圆齿轮的行星轮系,行星轮系包括太阳轮、过渡轮以及行星轮,过渡轮分别与太阳轮与行星轮对接,以将太阳轮的动力传递至行星轮驱动秧苗插植臂运转,该结构通过非匀速传动特性,形成适宜的栽插运动轨迹。椭圆齿轮系设计加工简便,传动平滑,但该结构中所有齿轮的椭圆参数必须一致,使得传动比变化规律单一、变化范围小,因此栽植轨迹设计受限制,很难达到大苗栽植轨迹要求。
发明内容
发明目的:为了克服现有技术中存在的不足,本发明提供一种克服了传统行星轮系变化规律单一变化范围小缺点、可满足水稻大苗栽植要求的非匀速传动的水稻大苗栽植机构及栽植装置。
技术方案:为实现上述目的,本发明的非匀速传动的水稻大苗栽植机构,其包括机座,所述机座上安装有插植组件以及用于将动力传递至所述插植组件的太阳轮与传动齿轮组;
所述传动齿轮组包括两个过渡轮以及一个行星轮,所述太阳轮、过渡轮及行星轮三者均为非圆齿轮;
两个所述过渡轮安装在同一转轴上,且两者的相位不同;其中一个所述过渡轮与所述太阳轮啮合,另一个所述过渡轮与所述行星轮啮合;所述行星轮与所述插植组件驱动连接。
进一步地,所述插植组件有多组,所有所述插植组件相对于所述太阳轮的转动中心圆周阵列设置,且所述太阳轮与每组所述插植组件之间均设置有所述传动齿轮组。
进一步地,所述太阳轮、过渡轮及行星轮三者均为椭圆齿轮,且所有椭圆齿轮的离心率的数值范围为0.10~0.15。
进一步地,初始状态下,所述插植组件的取秧针与所述行星轮的长轴之间的相位角为70~85°;所述太阳轮的长轴与水平面之间的相位角为55~62°,两个所述过渡轮的长轴相位差为0~15°。
进一步地,所述插植组件包括组件壳体、取秧针以及推杆;
所述组件壳体与机座转动连接,且其相对于所述行星轮固定;所述取秧针固定在所述组件壳体上;
所述取秧针的端部具备供秧苗嵌入的槽口;所述推杆的端部具备两个平行设置的翼板,两个所述翼板之间形成有容置槽,所述容置槽与所述槽口对置设置;
所述推杆可相对于所述取秧针平移,且两者随着所述组件壳体的周期性运动而周期性间隙往复运动。
一种水稻大苗栽植装置,其包括机架,所述机架上安装有若干组载秧台,且所述机架上对应于每个所述载秧台均设置有上述的水稻大苗栽植机构;
所述机架上安装有用于驱动所述水稻大苗栽植机构运转的驱动装置;
所述载秧台可相对于所述机架周期性往复平移。
进一步地,所述载秧台及所述驱动装置由同一动力源驱动。
有益效果:本发明的非匀速传动的水稻大苗栽植机构及栽植装置通过设置两个过渡轮,且两个过渡轮分别与太阳轮及行星轮啮合,如此传统的行星轮系被拆分为两级相互独立的传动齿轮组,由于两个过渡轮同转动轴且相位不同,且两级传动齿轮组的椭圆参数可以不一致,因此太阳轮与传动齿轮组构成的行星轮系可以产生丰富的变化规律与变化范围,栽植轨迹的优化空间较大,产生的栽植轨迹可绕开较高的水稻大苗,能适应长秧龄大苗移栽的要求。
附图说明
附图1为传统水稻栽植机构的结构图;
附图2为本发明之非匀速传动的水稻大苗栽植机构的外形图;
附图3为非匀速传动的水稻大苗栽植机构的剖视图;
附图4为太阳轮与传动齿轮组的组合结构示意图;
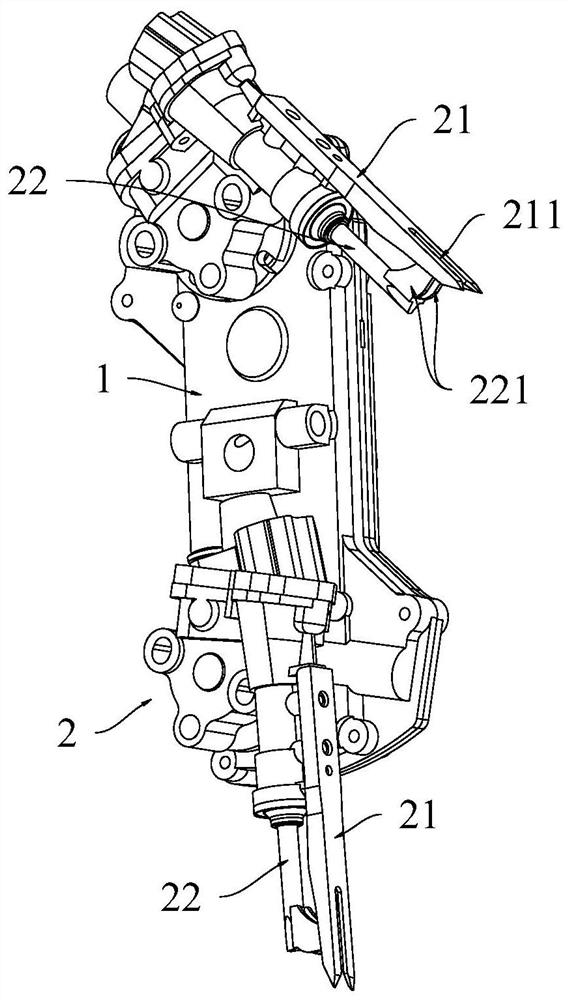
附图5为插植组件的剖视结构图;
附图6为本发明之栽植机构的栽植轨迹与传统栽植机构的栽植轨迹的对比图;
附图7为水稻大苗栽植装置的第一视角结构图;
附图8为水稻大苗栽植装置的第二视角结构图;
附图9为驱动载秧台运动的驱动机构的结构图;
附图10为优选实施例中驱动载秧台运动的驱动机构的结构图。
图中:1-机座;2-插植组件;21-取秧针;211-槽口;22-推杆;221-翼板;23-壳体;24-凸轮;25-杠杆;251-凸起部;26-连杆;27-弹簧;28-弹性支杆;3-太阳轮;4-传动齿轮组;41-过渡轮;42-行星轮;5-机架;61-载秧台;62-驱动螺杆;63-滑块;621-螺旋槽部;622-环槽部;631-置入部;64-三通件;65-波纹管;66-辅助螺杆;661-推动螺旋槽;67-推动件;68-推动弹簧;7-驱动装置;8-平土板;10-牵引机械;101-地轮;102-搁置架。
具体实施方式
下面结合附图对本发明作更进一步的说明。
如附图2-3所示的非匀速传动的水稻大苗栽植机构(以下简称“栽植机构”),其包括机座1,所述机座1上安装有插植组件2以及用于将动力传递至所述插植组件2的太阳轮3与传动齿轮组4;所述传动齿轮组4包括两个过渡轮41以及一个行星轮42,所述太阳轮3、过渡轮41及行星轮42三者均为非圆齿轮,本实施例中,三者为椭圆齿轮;两个所述过渡轮41安装在同一转轴上,且两者的相位不同(如附图4所示);其中一个所述过渡轮41与所述太阳轮3啮合,另一个所述过渡轮41与所述行星轮42啮合;所述行星轮42与所述插植组件2驱动连接。
上述结构通过设置两个过渡轮41,且两个过渡轮41分别与太阳轮3及行星轮42啮合,如此传统栽植机构的行星轮系被拆分为两级相互独立的传动齿轮组,由于两个过渡轮41同转动轴且相位不同,且两级传动齿轮组的椭圆参数可以设置得不一致,因此太阳轮与传动齿轮组构成的行星轮系可以产生丰富的变化规律与变化范围,栽植轨迹的优化空间较大,产生的栽植轨迹可绕开较高的水稻大苗,能适应长秧龄大苗移栽的要求。
优选地,所有椭圆齿轮的离心率的数值范围为0.10~0.15。且初始状态下,所述插植组件2的取秧针21与所述行星轮42的长轴之间的相位角为70~85°;所述太阳轮3的长轴与水平面之间的相位角为55~62°,,两个所述过渡轮41的长轴相位差为0~15°。采用上述参数,有效增大了栽植轨迹绕过已插秧苗的高度,进而实现栽植机构既能用于水稻中小苗移栽,也能适应长秧龄大苗移栽的要求。以椭圆齿轮的离心率0.10、取秧针21与所述行星轮42的长轴之间的相位角取值70°、太阳轮3的长轴与水平面之间的相位角为55°、两个过渡轮41的长轴相位差为15°为例,其产生的栽植轨迹如附图6所示,图中,点划线所述为传统栽植结构的栽植轨迹,实线为本发明之栽植结构的栽植轨迹,可见,本发明之栽植机构可绕过的秧苗的高度是普通插植组件可绕过秧苗的高度的三倍以上。
本实施例中,如附图1所示,所述插植组件2有两组,所有所述插植组件2相对于所述太阳轮3的转动中心圆周阵列设置,且所述太阳轮3与每组所述插植组件2之间均设置有所述传动齿轮组4。如此,在一个转动周期内可完成两次取苗以及栽植作业,提升栽植效率。
如附图5所示,所述插植组件2包括组件壳体23、取秧针21以及推杆22;所述组件壳体23与机座1转动连接,且其相对于所述行星轮42固定;所述取秧针21固定在所述组件壳体23上;所述取秧针21的端部具备供秧苗嵌入的槽口211;所述推杆22的端部具备两个平行设置的翼板221,两个所述翼板221之间形成有容置槽,所述容置槽与所述槽口211对置设置;所述推杆22可相对于所述取秧针21平移,且两者随着所述组件壳体23的周期性运动而周期性间隙往复运动。
当插植组件2获取秧苗时,秧苗嵌入至槽口211内,且秧苗的一部分嵌入两个翼板221之间的容置槽中,随着栽植机构运转,取秧针21的端部到达秧苗的目标栽植位置时,推杆22相对于取秧针21运动,将秧苗推出槽口211并栽入土中。
具体地,所述组件壳体23内安装有用于驱动推杆22的驱动组件,驱动组件包括相对于机座1固定的凸轮24,凸轮24的外轮廓具备渐开线状的部分,渐开线状部分的两端之间具有阶梯部;驱动组件还包括杠杆25以及连杆26;所述杠杆25的两端分别铰接在所述组件壳体23以及所述连杆26的一端,且所述杠杆25上具备配合凸轮24使用的凸起部251;连杆26的另一端铰接在推杆22上,推杆22可相对于机座1平移滑动。组件壳体23还安装有分别置于杠杆25中部两侧的弹簧27以及弹性支杆28。采用上述结构,当组件壳体23带动杠杆25相对于机座1转动时,凸轮24上渐开线状的型面作用于凸起部251,使得杠杆25发生转动,弹簧27被压缩,且推杆22逐渐缩回,当凸起部251到达凸轮24的阶梯型面处时,杠杆25被释放,弹簧27使杠杆25瞬间回转,推杆22快速推出完成插秧作业;弹性支杆28优选由橡胶制成,其可承受杠杆25的撞击,减少噪音与震动。
本发明还提供了一种水稻大苗栽植装置,如附图7与附图8所示,其包括机架5,所述机架5上安装有若干组载秧台61,且所述机架5上对应于每个所述载秧台61均设置有上述的水稻大苗栽植机构;所述机架5上安装有用于驱动所述水稻大苗栽植机构运转的驱动装置7。
上述驱动装置7可同时驱动太阳轮3及机座1相对于机架5转动,且太阳轮3与机架5的转速不一样。当驱动装置7运转,机座1相对于机架5作旋转运动,同时各插植组件2相对于机架5作转动运动,如此取秧针21的末端可按栽植轨迹运动,插植组件2可进行取秧苗、插秧以及绕过已栽好的秧苗的作业。
所有所述载秧台61可同步相对于所述机架5在设定区间内作周期性往复平移运动,且所述载秧台61所做的平移运动具有规律间歇性。由于载秧台61所做的平移运动具有规律间歇性,载秧台61上的苗毯每运动一段距离会停留一段时间以供插植组件2分离秧苗,如此,分离秧苗的难度低,机构之间协同配合的设计难度及调试难度均较低。
具体地,为了实现载秧台61的规律间歇平移运动,所有所述载秧台61相互固定形成一体摆放架,且相邻的载秧台61之间隔有分隔用的凸起棱;所述一体摆放架与所述机架5之间设置有驱动机构;如附图9所示,所述驱动机构包括驱动螺杆62以及滑块63;所述驱动螺杆62相对于所述机架5转动安装,且其上形成有正、反双向的两组导引槽,两组导引槽的两端均相互连通;每组所述导引槽均包括规律间隔设置的螺旋槽部621与环槽部622;所述滑块63相对于所述一体摆放架固定,且其端部具备置于所述导引槽内的置入部631。
采用上述驱动机构,由于正、反双向的两组导引槽的两端相互连通,当驱动螺杆62转动,置入部631可在正、反双向的两组导引槽中循环来回运动,以实现所有载秧台61的规律性来回运动,且置入部631在每个导引槽(正向或反向)中运动时,由于导引槽由规律间隔设置的螺旋槽部621与环槽部622构成,置入部631间隔在螺旋槽部621与环槽部622运动,可实现载秧台61每走一段停一段时间。
为了使滑块63与驱动螺杆62稳定配合,所述驱动机构还包括T字形的三通件64,其内形成有呈T字形布局的双向贯通孔及单向贯通孔;所述所述驱动螺杆62穿过所述双向贯通孔,且所述三通件64可相对于所述驱动螺杆62滑动;所述滑块63安装在所述单向贯通孔内。
此外,所述三通件64的两侧各连接有可伸缩的波纹管65,波纹管65可防止泥垢污染螺杆62且对螺杆62起到保护作用。
由于上述方案中,螺杆62上的环形槽622为一圈完整的环槽,当置入部631进入环槽622中后,可能会出现置入部631一直在环槽622内而无法再进入螺旋槽部621的情形,或者可能会出现置入部631入错螺旋槽部621的情形,为了避免上述情形的发生,如附图10所示,驱动机构还包括辅助螺杆66以及由辅助螺杆66驱动运动的推动件67,所述推动件67呈U字形,其两侧与所述三通件64之间均设置有推动弹簧68;辅助螺杆66上形成有正、反两个方向对称设置的两组推动螺旋槽661,正、反两个方向上的推动螺旋槽661的两端相通,且每条推动螺旋槽661均非定螺距螺旋槽,而是螺距疏密相间的螺旋槽,即在一段距离内推动螺旋槽661的螺距为第一螺距,在其相邻的一段距离内推动螺旋槽661的螺距为第二螺距。基于上述结构,其工作原理为,滑块63与推动件67分别从各自所在螺杆的螺旋槽的一端出发,两个螺杆同步转动,当运转一段时间后,滑块63上的置入部631进入一个环槽622内,随着两个螺杆继续转动,置入部631在环槽622内运动,而推动件67仍在辅助螺杆66的推动下继续移动,如此,位于滑块63一侧的推动弹簧68受到压缩而产生弹力,当置入部631在环槽内运动到下一段螺旋槽部621的入口,由于推动弹簧68的弹力作用,可将置入部631推入螺旋槽部621的入口,且此时推动件67所在位置对应的推动螺旋槽661的螺距变密,辅助螺杆66驱动推动件67的速度慢于螺旋槽部621推动滑块63运动的速度,直至推动弹簧68的长度恢复正常,推动螺旋槽661又开始变稀疏,使得辅助螺杆66驱动推动件67的速度大于等于螺旋槽部621推动滑块63运动的速度,置入部631再次进入下一个环槽622,如此循环往复,可保证置入部631一直按预设规律运动,且推动弹簧68的变形量不会累积。
优选地,为了节省动力源,所述载秧台61及所述驱动装置7由同一动力源驱动。上述动力源优选为地轮,也可以是电机、液压泵等常用驱动元件。
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种非匀速传动的水稻大苗栽植机构及栽植装置
- 一种水稻大苗栽植装置