一种精准控制单色仪光谱的输出方法及装置
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及控制光谱技术领域,尤其是一种精准控制单色仪光谱的输出方法及装置。
背景技术
单色仪是用来研究和分析物质光谱的装置,目前已经在军事、工业、农业、医疗和科学研究等各个领域得到广泛的应用。其中可控制光谱输出的单色仪是最通用的测量仪器,是否能够快速、精确控制单色仪的输出光谱,是市场对单色仪选择的重要指标。
实现准确控制光栅旋转角度的系统目前用的方法大概有以下几种:
一种是采用精密步进电机直接驱动光栅,光栅转动的角度通过精密步进电机的步数来确定。但是这种方案中精密步进电机在工作时容易出现丢步问题,所以自由误差大,该方案难以实现准确的控制光谱输出。
一种方法是采用直流无刷电机和高精度光学编码器组成控制系统直接驱动控制,这种方式能够准确的控制光栅的旋转角度,但该方法高精度光学编码器的累计误差大,同时光栅在对转动角度高精度的要求下大大提高了对光学编码器分辨率的要求,成本较高。
还有一种是采用步进电机、蜗轮蜗杆和光电开关的组合来对光栅进行控制,此方法主要是通过光电开关来显示步进电机的步数和光栅旋转的角度,此方法虽然能够控制光栅,但是将误差全部累计在3600内,所以累计误差过大,不能精确的控制光栅,此方法以蜗轮蜗杆作为传动装置,它的减速比较大,所以会大大的减小光栅的切换速度,降低工作效率。
发明内容
本发明针对现有技术中存在的上述技术问题,提出了一种精准控制单色仪光谱的输出方法及装置。
为实现上述目的,本发明采用如下技术方案:
一种精准控制单色仪光谱的输出方法,其特征是,包括的步骤如下:
步骤一,当步进电机工作时,电磁脉冲转换为机械运动,步进电机转轴驱动与之相连的小同步带齿轮开始转动,带动与之同步带啮合的大同步带齿轮传动,所述的小同步带齿轮、同步带和大同步带齿轮构成一级减速传动结构;此一级减速传动结构的同步带齿轮组传动比为K1;
步骤二,穿过齿轮支架的第一转轴所连接的小直齿圆锥齿轮转动,大小直齿圆锥齿轮组相互啮合,构成了二级减速结构。此二级减速结构的圆锥齿轮组传动比为K2;
步骤三,与小直齿圆锥齿轮啮合的大直齿圆锥齿轮驱动着安装在固定板上的第二转轴,第二转轴带动与之上下连接的光栅和编码器转动;
步骤四,编码器每转动单位码值会对步进电机的脉冲累计值做一次检测,当检测到步进电机的脉冲累计值与驱动编码器做检测时的码值不对应时,将调整步进电机的脉冲值,使调整后的步进电机的脉冲值与编码器的码值对正。
2、根据权利要求1所述的一种精准控制单色仪光谱的输出方法的装置,其特征在于,该装置包括步进电机、小同步带齿轮、同步带、大同步带齿轮、齿轮支架、第一转轴、小直齿圆锥齿轮、大直齿圆锥、第二转轴、编码器、光栅和固定板;所述步进电机固定在齿轮支架上;所述步进电机转轴穿过齿轮支架固定小同步带齿轮;所述小同步带齿轮通过同步带与大同步带齿轮相互啮合;所述第一转轴穿过齿轮支架固定大同步带齿轮与小直齿圆锥齿轮;所述小直齿圆锥齿轮与大直齿圆锥齿轮啮合;所述大直齿圆锥齿轮固定在第二转轴上;所述第二转轴的上端连接,所述第二转轴的下端连接编码器;所述第二转轴安装在固定上。
本发明的有益效果是:本发明采用精度较低的编码器控制步进电机,使编码器和步进电机组成半闭环控制系统,用此系统对单色仪光谱的输出做精确的控制。本发明的方法将同步电机做输出时转动的角度与脉冲值不符导致的累计误差大大的降低。本发明机械结构简单,生产成本低,在使用时性能稳定,因此该方法具有普遍使用的意义。
附图说明
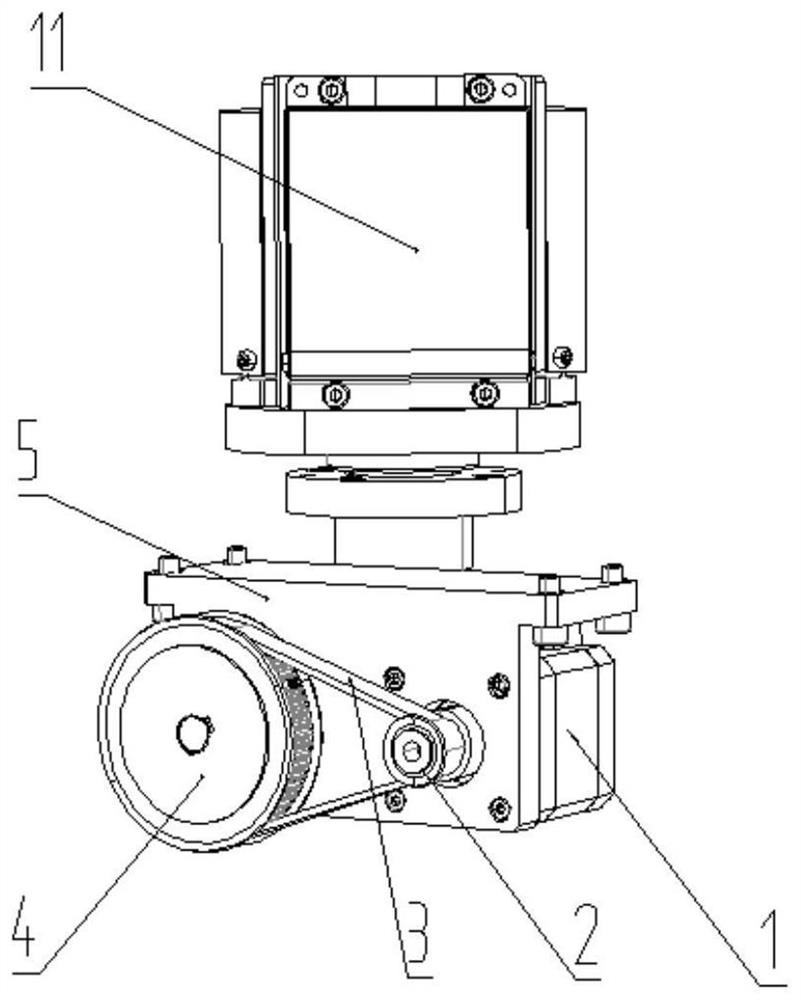
图1为本发明一种精准控制单色仪光谱的输出方法的装置结构图。
图2为图1的侧方结构图。
图中:1、步进电机,2、小同步带齿轮,3、同步带,4、大同步带齿轮,5、齿轮支架,6、第一转轴,7、小直齿圆锥齿轮,8、大直齿圆锥齿轮,9、第二转轴,10、编码器,11、光栅,12、固定板。
图3为光栅11的波长精度与角度精度转换关系的示意图。
图3中H1为光栅11在00时的位置,P1是光栅11在H1位置时输出的光谱值275NM,H2为光栅11旋转100的所在位置,P2是光栅11在H1位置时对输出的光谱值550NM。
图4为增加步进电机1精度的原理示意图。
图4中的D为步进电机1输出单位脉冲时步进电机1转轴转动的角度数值,B为步进电机1输出单位脉冲经过一级减速结构和二级减速结构增加角度精度后转动的角度值。
图5为编码器10控制步进电机1的原理示意图。
图5中的圆弧A的长度代表编码器10的单位脉冲对应的码值数(即离散值的起点和终点),圆弧B的长度代表步进电机1经过增加角度精度后输出单位脉冲驱动编码器10运动的码值(即为插入值),本发明是将编码器10的每一个脉冲作为控制单元对步进电机1的30个脉冲做精确的控制,即步进电机1理想状态下每走30步可完成一个循环,编码器10做一次计数,然后编码器10的下一个单位脉冲继续对步进电机1进行控制。
具体实施方式
下面结合附图对本发明做进一步详细说明。
如图1和2所示,一种精准控制单色仪光谱的输出方法的装置,包括步进电机1、小同步带齿轮2、同步带3、大同步带齿轮4、齿轮支架5、第一转轴6、小直齿圆锥齿轮7、大直齿圆锥齿轮8、第二转轴9、编码器10、光栅11和固定板12。
所述步进电机1固定在齿轮支架5上;所述步进电机1转轴穿过齿轮支架5固定小同步带齿轮2;所述小同步带齿轮2通过同步带3与大同步带齿轮4相互啮合;所述第一转轴6穿过齿轮支架5固定大同步带齿轮4与小直齿圆锥齿轮7;所述小直齿圆锥齿轮7与大直齿圆锥齿轮8啮合;所述大直齿圆锥齿轮8固定在第二转轴9上。
所述第二转轴9的上端连接光栅11,所述第二转轴9的下端连接编码器10。
所述第二转轴9安装在固定板12上。
本装置中机械间的连接均有螺母固定,且大小同步带齿轮之间可进行张紧处理,张紧后可消除机械间隙和传动滑移,即消除一级传动装置中的传动误差。而在二级减速装置中,大直齿圆锥齿轮8与小直齿圆锥齿轮7之间为分体式装配形式,且小直齿圆锥齿轮7可沿传动的轴线方向平移,既而实现对小直齿圆锥齿轮7的顶紧固定。这种调整方式代替了传统的蜗轮蜗杆形式。可消除直齿圆锥齿轮组之间的机械间隙,实现无间隙精密传动。
一种精准控制单色仪光谱的输出方法,包括的步骤如下:
步骤一,当步进电机1工作时,电磁脉冲转换为机械运动。步进电机1转轴驱动与之相连的小同步带齿轮2开始转动,带动与之同步带3啮合的大同步带齿轮4传动,所述的小同步带齿轮、同步带和大同步带齿轮构成一级减速传动结构。此一级减速传动结构的同步带齿轮组传动比为K1。
步骤二,穿过齿轮支架5的第一转轴6所连接的小直齿圆锥齿轮7转动。大小直齿圆锥齿轮组相互啮合,构成了二级减速结构。此二级减速结构的圆锥齿轮组传动比为K2。
步骤三,与小直齿圆锥齿轮7啮合的大直齿圆锥齿轮8驱动着安装在固定板12上的第二转轴9,第二转轴带动与之上下连接的光栅11和编码器10转动。
步骤四,编码器10每转动单位码值会对步进电机1的脉冲累计值做一次检测,当检测到步进电机1的脉冲累计值与驱动编码器10做检测时的码值不对应时,将调整步进电机1的脉冲值,使调整后的步进电机1的脉冲值与编码器10的码值对正。
为更清晰的一种精准控制单色仪光谱的输出方法,下面我们将列举实施例。所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
采用转动一周需要X(X=12000)个脉冲的步进电机1,用此步进电机1做整个系统的原动机。此步进电机1的单位转动的角度精度D为:
采用波长精度为0.1NM,光谱范围为λ1~λ2(λ1=275NM~λ2=500NM),有效旋转角度为α(α=100)的光栅11,此光栅11改变单位波长时所需转动的角度J为:
采用Y(Y=215)BIT的编码器10,用此精度的编码器10作为整个系统的控制器。所述的编码器10每改变单位码值时所需转动的角度A为:
A=360×3600÷Y=360×3600÷2
步骤一,当12000的步进电机1工作时,电磁脉冲转换为机械运动。步进电机1转轴驱动相连的小同步带齿轮2开始转动,带动与之同步带3啮合的大同步带齿轮4传动,构成一级减速传动结构。此一级减速传动结构的同步带齿轮组传动比为K1(K1=8)。
步骤二,穿过齿轮支架5的第一转轴6所连接的小直齿圆锥齿轮7转动。大小直齿圆锥齿轮组相互啮合,构成了二级减速结构。此二级减速结构的圆锥齿轮组传动比为K2(K2=10)。在传动过程中一级减速传动结构和二级减速结构将步进电机的转动精度提高到能够精准的控制光栅转动,提高后的精度B为:
B=D÷k
步骤三,与小直齿圆锥齿轮7啮合的大直齿圆锥齿轮8驱动着安装在固定板12上的第二转轴9,第二转轴9带动与之上下连接的光栅11和编码器10转动。
上述编码器10转动39S时,步进电机1需要输出的理论脉冲个数N为:
N=A÷B=39÷1.3=30。
步骤四,编码器10每转动39S时会对步进电机1的30次脉冲累计值做一次检测,当检测到步进电机1的脉冲累计值与驱动编码器10做检测时的码值不对应时,将调整步进电机1的脉冲值,使调整后的步进电机1的脉冲值与编码器10的码值对正,即使光栅11的转动角度与编码器10的码值对正,用此方法将极大的降低光栅11旋转的累计误差,进而提高了光谱的输出精度。
- 一种精准控制单色仪光谱的输出方法及装置
- 一种单色仪与成像光谱仪的交叉光谱定标装置及方法