一种用于调节声波电机振动的控制方法
文献发布时间:2023-06-19 09:32:16
本申请请求中国发明专利申请201910966968.2的优先权,在先申请的内容同样包含在本申请之中。
技术领域
本发明涉及电动牙刷技术领域,特别涉及一种用于调节声波电机振动的控制方法。
背景技术
使用声波电机的电动牙刷,其刷头每分钟的摆动次数是由声波电机的振动频率决定的,而其刷头的摆动力度是由声波电机的振动强度决定的。目前使用声波电机的电动牙刷,都是在出厂时设置好几个不同的挡位,固化在电动牙刷的主控芯片中。用户在使用电动牙刷时,通过按压电动牙刷上的按钮,在预设的挡位之间切换。不同的预设挡位之间,给声波电机供电的交流信号的频率和电压有效值各不相同,有时也会使用频率或电压有效值周期性变化的交流信号来驱动声波电机。
在现有技术中,有一类电动牙刷在使用声波电机驱动牙刷工作过程中,虽然一个电动牙刷可以有很多个不同的挡位,但每个挡位的交流驱动信号的模式是出厂时就固化好的,并不能随意调节。也就是用户只能在电动牙刷预设的模式之间切换,并不能做到让电动牙刷在自己想要的任意频率和/或力度下工作。
在现有技术中,还有一类电动牙刷在使用时,可以使用上下两个按键来实现加速和减速,但是电动牙刷刷柄的空间有限,这种牙刷并不便于操作,在实际使用中用户由于要用手来握持牙刷,并在刷牙时感受实时的力度相当困难。
在现有技术中,还有一类电动牙刷在使用时,虽然可以使用一个较大的按键来调速,但是其模式较为单一,无法在多种模式下调速匹配不同的刷牙需求。
发明内容
本发明的发明目的在于提供了一种用于调节声波电机振动的控制电路及方法,用以解决现有技术中的上述问题。
为此,本专利提供的技术方案包括:
第一方面,本发明提供了一种用于调节声波电机振动的控制方法,用于控制如下用于调节声波电机振动的控制电路,所述用于调节声波电机振动的控制电路包括:微控制单元;H桥单元,所述H桥单元与所述微控制单元连接,且,所述H桥单元的电源正极端与电源正极VCC连接,所述H桥单元的电源负极端接地;声波电机,所述声波电机与所述H桥单元连接,通过所述H桥单元为所述声波电机提供交流方波驱动信号;所述控制方法包括:获得声波电机的第一交流方波信号和第一振动频率微控制单元的输入引脚接收外部输入的第一控制信号;根据所述第一交流方波信号和所述第一控制信号,调整所述振动频率,以使所述动频率发生线性变化;微控制单元的输入引脚接收外部输入的第一控制信号;根据所述第一交流方波信号和所述第一控制信号,调整所述第一占空比,以使所述第一占空比发生线性变化;所述微控制单元的输入引脚接收外部输入的第二控制信号;根据所述第二控制信号,使所述声波电机的振动频率保持在第二振动频率上;其中,所述第二振动频率为所述微控制单元接收到所述第二控制信号时的振动频率。
第二方面,本发明提供了一种用于调节声波电机振动的控制方法,用于控制如下用于调节声波电机振动的控制电路,所述用于调节声波电机振动的控制电路包括:微控制单元;H桥单元,所述H桥单元与所述微控制单元连接,且,所述H桥单元的电源正极端与电源正极VCC连接,所述H桥单元的电源负极端接地;声波电机,所述声波电机与所述H桥单元连接,通过所述H桥单元为所述声波电机提供交流方波驱动信号;所述控制方法包括:获得声波电机的第一交流方波信号和第一占空比;微控制单元的输入引脚接收外部输入的第一控制信号;根据所述第一交流方波信号和所述第一控制信号,调整所述第一占空比,以使所述第一占空比发生线性变化;所述微控制单元的输入引脚接收外部输入的第二控制信号;根据所述第二控制信号,使所述声波电机驱动波形的占空比保持在第二占空比上,其中,所述第二占空比为所述微控制单元接收到所述第二控制信号时的占空比。
优选地,所述输入引脚连接至电动牙刷的开关按钮上。
优选地,所述第一振动频率发生线性变化包括,所述振动频率随着时间先逐渐增大,再逐渐减小。
优选地,所述第一占空比发生线性变化包括,所述占空比随着时间先逐渐增大,再逐渐减小。
优选地,所述H桥单元包括:第一MOS管,所述第一MOS管与所述微控制单元的第一引脚连接;第二MOS管,所述第二MOS管与所述微控制单元的第二引脚连接;第三MOS管,所述第三MOS管与所述微控制单元的第三引脚连接;第四MOS管,所述第四MOS管与所述微控制单元的第四引脚连接。
优选地,所述第一MOS管、第三MOS管为P沟道场效应管。
优选地,所述第二MOS管、第四MOS管为N沟道场效应管。
优选地,当所述第一引脚、第三引脚输出低电平时,所述第一MOS管、第三MOS管导通;当所述第二引脚、第四引脚输出高电平时,所述第二MOS管、第四MOS管导通;则根据预设逻辑真值规则,当所述第一引脚、第二引脚为0,第三引脚、第四引脚为1时,所述第一MOS管导通、所述第二MOS管截止、所述第三MOS管截止、所述第四MOS管导通,电源通过第一MOS管、第四MOS管对所述声波电机供电,以使所述声波电机正向偏置。
优选地,当所述第一引脚、第二引脚、第三引脚、第四引脚均为1时,则所述第一MOS管、第三MOS管截止,所述第二MOS管、第四MOS管导通,所述声波电机的电流通过所述第二MOS管、第四MOS管续流并且逐渐减小,所述声波电机回到零偏置位置。
本发明实施例中的上述一个或多个技术方案,至少具有如下一种或多种技术效果:
本发明实施例提供的一种用于调节声波电机振动的控制电路及方法,所述控制电路包括:微控制单元、H桥单元和声波电机,其中,H桥单元与微控制单元连接,且,H桥单元的电源正极端与电源正极VCC连接,H桥单元的电源负极端接地,进而将声波电机与H桥单元连接,通过H桥单元为声波电机提供交流方波驱动信号。当微控制单元MCU的四个引脚的输出状态在状态1和状态2之间周期性切换时,令微控制单元在状态1和状态2之间切换的频率为f。若f固定不变,则声波电机的振动频率亦为固定频率;若f做线性变化,则声波电机的振动频率也会随着做线性变化。当f随着时间先逐渐增大,再逐渐减小,则可以得到的声波电机两端的电压波形如图5所示。当微控制单元的CTRL引脚接收到输入的控制信号时,便使f开始做线性变化,当再次接收到CTRL的输入控制信号时,微控制单元使f停留在收到CTRL信号时的频率。CTRL信号可以接到电刷的按钮开关上,这样用户便可以通过按开关来进行无级调频,使声波电机的振动频率停留在自己想要的频率上,从而解决了现有技术中的电动牙刷每个挡位的交流驱动信号的模式不能随意调节,或者难以方便地通过一个按键的操作来调节,造成用户只能在电动牙刷预设的模式之间切换、无法在多个模式下任意调节电动牙刷的频率和/或力度的技术问题,达到了智能化程度高,声波电机的振动频率和振动力度可以无级调节,用户可以选择任意一个想要的频点/力度点的技术效果。
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
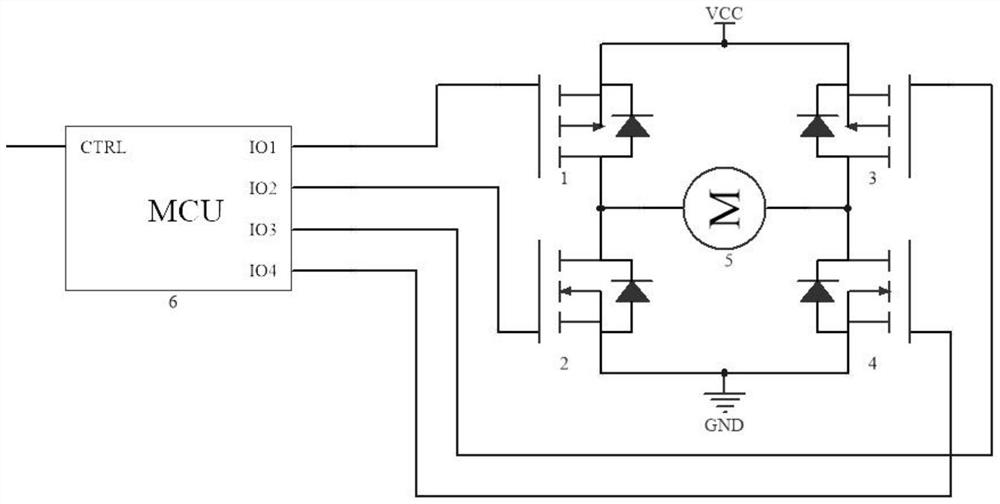
图1为本发明实施例中一种用于调节声波电机振动的控制电路的原理图;
图2为本发明实施例中另一种用于调节声波电机振动的控制电路的原理图;
图3为本发明实施例中一种用于调节声波电机振动的控制方法的流程示意图;
图4为本发明实施例中一种用于调节声波电机振动的控制方法中声波电机两端的交流方波信号示意图;
图5为为本发明实施例中声波电机无级调频率的基础波形图;
图6为本发明实施例中一种用于调节声波电机振动的控制方法中声波电机两端的交流方波信号的另一示意图;
图7为本发明实施例中声波电机无级调力度的基础波形图。
附图标记说明:第一MOS管1、第二MOS管2、第三MOS管3、第四MOS管4、声波电机5、微控制单元6、电机控制芯片7。
具体实施方式
本申请实施例通过提供了一种用于调节声波电机振动的控制电路及方法,解决了现有技术中的电动牙刷每个挡位的交流驱动信号的模式不能随意调节,造成用户只能在电动牙刷预设的模式之间切换,无法任意调节电动牙刷的频率和/或力度的技术问题。
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一
本实施例中提供了一种用于调节声波电机振动的控制电路,该控制电路用于调节声波电机的频率或力度,该控制电路是用于硬件上支撑本专利中涉及的一种用于调节声波电机振动的控制方法。但是本领域技术人员可以理解的是,在本实施例中,其结构仅仅是示例性的;也就是说该电路结构可以根据调节电机的需要而进行替换和修改,而本实施例仅仅是给出了一种实现该调节方法的硬件支撑的例子。
图1为本发明实施例中一种用于调节声波电机振动的控制电路的原理图,如图1所示,所述控制电路包括:微控制单元6。
具体而言,微控制单元6为该控制电路的主要控制部分,微控制单元6的英文名为Micro controller Unit,简称为MCU,是把中央处理器(CPU)的频率与规格做适当缩减,并将内存、计数器、USB、A/D转换、UART、PLC、DMA等周边接口,甚至LCD驱动电路都整合在单一芯片上,形成芯片级的计算机,为不同的应用场合做不同组合控制。本实施例中的微控制单元6上设置有多个引脚,分别为第一引脚IO1、第二引脚IO2、第三引脚IO3、第四引脚IO4,通过四个输出引脚可以与其他元件进行连接,同时,微控制单元6还包括第五引脚CTRL,其中的CTRL是外部控制信号的输入引脚。
所述控制电路还包括:H桥单元,所述H桥单元与所述微控制单元6连接,且,所述H桥单元的电源正极端与电源正极VCC连接,所述H桥单元的电源负极端接地。
进一步的,所述H桥单元包括:第一MOS管1,所述第一MOS管1与所述微控制单元6的第一引脚连接;第二MOS管2,所述第二MOS管2与所述微控制单元6的第二引脚连接;第三MOS管3,所述第三MOS管3与所述微控制单元6的第三引脚连接;第四MOS管4,所述第四MOS管4与所述微控制单元6的第四引脚连接。即,这四个MOS管分别由MCU的四个输出引脚(IO1、IO2、IO3、IO4)控制。
进一步的,所述第一MOS管1、第三MOS管3为P沟道场效应管。
进一步的,所述第二MOS管2、第四MOS管4为N沟道场效应管。
具体而言,H桥单元与微控制单元6相连接,且H桥单元是一种电子电路,可使其连接的负载或输出端两端电压反相/电流反向。这类电路可用于各种场合中直流电动机的顺反向控制及转速控制、步进电机控制(双极型步进电机还必须要包含两个H桥的电机控制器),电能变换中的大部分直流-交流变换器(如逆变器及变频器)、部分直流-直流变换器(推挽式变换器)等,以及其它的功率电子装置。本实施例中的H桥单元包括第一MOS管1、第三MOS管3、第二MOS管2、第四MOS管4,也就是说,通过第一MOS管1、第三MOS管3、第二MOS管2、第四MOS管4以及它们之间的必要的连线构成了一个H桥,通过H桥单元给声波电机5提供交流方波驱动信号。其中,MOS管是金属(metal)-氧化物(oxide)-半导体(semiconductor)场效应晶体管,或者称是金属-绝缘体(insulator)-半导体。
进一步的,第一MOS管1和第三MOS管3为P沟道场效应管(PMOS),第二MOS管2和第四MOS管4为N沟道场效应管(NMOS),其中,P沟道场效应管包括栅极、源极和漏极,其中,栅极为G(gate);源极为S(source);漏极为D(drain)。P沟道场效应管的电源一般接在S,输出D。由p型衬底和两个高浓度n扩散区构成的MOS管叫作N沟道场效应管,该管导通时在两个高浓度n扩散区间形成n型导电沟道。
在本实施例中,进一步地,第一MOS管1和第三MOS管3的一端构成H桥单元的电源正极端与电源正极VCC连接,其中,VCC是Volt Current Condenser的简写,意思是电路的供电电压,即为本实施例中的控制电路的电源正极;第二MOS管2和第四MOS管4的一端构成H桥单元的电源负极端与控制电路的接地端GND连接,其中,GND是电线接地端的简写,即为本实施例中的控制电路的地。
在本实施例中,所述控制电路还包括:声波电机5,所述声波电机5与所述H桥单元连接,通过所述H桥单元为所述声波电机5提供交流方波驱动信号。
具体而言,声波电机5是以超声频域的机械振动为驱动源的驱动器,本实施例中的声波电机5与H桥单元连接,进而通过H桥单元给声波电机5提供交流方波驱动信号。
进一步的,在该控制电路中,当第一引脚IO1和第三引脚IO3输出低电平时,第一MOS管和第三MOS管导通;当第二引脚IO2、第四引脚IO4输出高电平时,第二MOS管、第四MOS管导通。
根据表1中的控制逻辑真值,当IO1=IO2=0,IO3=IO4=1时,第一MOS管导通,第二MOS管截止,第三MOS管截止,第四MOS管导通,则电源通过第一MOS管、第四MOS管对声波电机5供电,电机正向偏置。
表1:控制逻辑的真值
上表中,当IO1=IO2=IO3=IO4=1时,第一MOS管、第三MOS管截止,第二MOS管、第四MOS管导通,此时电源不给声波电机5供电,声波电机5的电流通过第二MOS管、第四MOS管续流并且逐渐减小,声波电机5缓慢回到零偏置位置。
如上表,当状态1时声波电机5正向偏置,状态2时声波电机5反向偏置,则当微控制单元MCU的四个引脚的输出状态在状态1和状态2之间周期性切换时,就可以在声波电机5两端产生一个正负交替的交流方波信号,使声波电机5来回往复振动。状态1和状态2周期性切换的频率,即为声波电机5振动的频率。
声波电机5的振动力度和驱动它的交流信号的电压有效值正相关。当微控制单元6的输出引脚状态在状态1和状态2之间来回切换时,控制信号的占空比是100%(也就是电源始终在供电);当状态1和状态2之间各加入一段状态3时,控制信号的占空比就不到100%了(状态3时电源不供电)。例如前述的260Hz方波,当微控制单元6的输出引脚在状态1、状态3、状态2和状态3之间周期性切换,在状态1停留0.962ms,然后切换至状态3停留0.962ms,然后切换至状态2停留0.962ms,然后切换至状态3停留0.962ms,则此时电机两端产生的就是一个260Hz/占空比50%的交流方波信号,如图6所示,可以看到,状态3时电源不对电机供电,所以上面这个占空比50%的波形,其电压的有效值只有占空比100%波形的一半。用这个波形来驱动声波电机,其振动力度会明显减小。占空比就是指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比。
进一步的,该控制电路也可以用集成的电机控制芯片7来代替4个MOS管组成的H桥,如图2所示。电机控制芯片7在内部集成了H桥和控制逻辑,通过MCU的引脚控制,可以输出和该控制电路一样的方波信号。MCU同样也可以调节方波信号的频率f和占空比d%。实际达到的效果和该控制电路也一样。
实施例二
本实施例提供了一种用于调节声波电机振动的控制方法,具体而言,在本具体实施方式中,在所述方法包括如下内容:
图3为本发明实施例中一种用于调节声波电机振动的控制方法的流程示意图,如图3所示,所述方法用于控制前述的用于调节声波电机振动的控制电路,所述控制方法包括:
步骤110:获得声波电机5的第一交流方波信号。
步骤120:获得所述声波电机5的第一振动频率或占空比信息。
具体而言,如前所述,状态1和状态2周期性切换的频率,即为声波电机5振动的频率。即声波电机获得第一振动频率。通过微控制单元6的输出引脚的切换,即可在声波电机5两端产生交流方波信号。如图4所示,当MCU的输出引脚在状态1和状态2之间周期性切换,在状态1停留1.923ms,然后切换至状态2停留1.923ms,则此时电机两端产生的就是一个260Hz的交流方波信号。令微控制单元6在状态1和状态2之间切换的频率为f。若f固定不变,则声波电机5的振动频率亦为固定频率;若f做线性变化,则声波电机5的振动频率也会随着做线性变化。当f随着时间先逐渐增大,再逐渐减小,则可以得到的声波电机两端的电压波形如图5所示。
方波信号的波形和参数决定了所述声波电机的工作状态,例如振动频率、力度等,其中振动频率和方波信号的正负波形切换频率有关,占空比和方波信号的占空比设定有关。在本步骤中,所述获取的方式可以由MCU根据初始设定获得,也就是说该第一交流方波信号对应于所述电机的当前工作状态,例如声波电机根据之前的设定可能具有刷牙模式、清洗模式、儿童模式等等不同模式,在不同的模式下,声波电机的驱动波形有所不同;并且在不同模式下,基于之前设定的频率或力度的不同驱动波形也有所不同。通过MCU获得第一交流方波信号、第一振动频率或占空比信息并作为调整的初始数值,以进行后续的调节操作。
步骤130:微控制单元6的第五引脚接收外部输入的第一控制信号。
步骤140:根据所述第一交流方波信号和所述第一控制信号,调整所述第一振动频率,以使所述第一振动频率发生线性变化。
具体而言,上述得到的声波电机两端的电压波形即是声波电机无级调频的基础。因此,当微控制单元6的第五引脚即CTRL引脚接收到输入的第一控制信号时,便使f开始做线性变化。
步骤150:所述微控制单元的第五引脚接收外部输入的第二控制信号;
步骤160:根据所述第二控制信号,使所述声波电机的当前频率停留至第二振动频率上,其中,所述第二振动频率为所述微控制单元接收到所述第二控制信号时的频率。
具体而言,当微控制单元6的第五引脚即CTRL引脚再次接收到CTRL的输入的第二控制信号时,微控制单元6使f停留在收到该CTRL信号时的频率。CTRL信号可以接到电刷的按钮开关上,这样用户便可以通过按开关来进行无级调频,使声波电机的振动频率停留在自己想要的频率上。
进一步的,所述控制方法还包括:获得声波电机5的第二交流方波信号;获得所述第二交流方波信号的第一占空比;微控制单元6的第五引脚接收外部输入的第三控制信号;根据所述第二交流方波信号和所述第三控制信号,调整所述第一占空比,以使所述第一占空比发生线性变化;所述微控制单元6的第五引脚接收外部输入的第四控制信号;根据所述第四控制信号,使所述第二交流方波信号的当前占空比停留至第二占空比上,并根据所述第二占空比获得所述声波电机5的当前振动力度,其中,所述第二占空比为所述微控制单元6接收到所述第四控制信号时的值。
具体而言,声波电机5的振动力度和驱动它的交流信号的电压有效值正相关。当微控制单元6的输出引脚状态在状态1和状态2之间来回切换时,控制信号的占空比是100%(也就是电源始终在供电);当状态1和状态2之间各加入一段状态3时,控制信号的占空比就不到100%了(状态3时电源不供电)。例如前述的260Hz方波,当微控制单元6的输出引脚在状态1、状态3、状态2和状态3之间周期性切换,在状态1停留0.962ms,然后切换至状态3停留0.962ms,然后切换至状态2停留0.962ms,然后切换至状态3停留0.962ms,则此时电机两端产生的就是一个260Hz/占空比50%的交流方波信号,如图6所示,可以看到,状态3时电源不对电机供电,所以上面这个占空比50%的波形,其电压的有效值只有占空比100%波形的一半。用这个波形来驱动声波电机,其振动力度会明显减小。占空比就是指在一个周期内,信号处于高电平的时间占据整个信号周期的百分比。
为了保证声波电机均匀振动,驱动信号必须严格的正负对称,所以一个周期当中状态1和状态2的持续时间要严格一致,两边加入的状态3的持续时间也要严格一致。令微控制单元6在状态1和状态2之间切换的频率为f。若f固定不变,而减小同一个周期内状态1和状态2的占比,增加状态3的占比,则交流方波信号的占空比会变小,电机的振动力度会同步减弱。令一个周期中,状态1和状态2的持续时间之和与周期的占比为d%,则d%即为该方波信号的占空比。当f不变,d%随着时间先逐渐减小,再逐渐增大时,得到的波形如图7所示,此波形即是声波电机无级调力度的基础。
因此,当微控制单元6的CTRL引脚接收到输入的第三控制信号时,便使d%开始做线性变化,当再次接收到CTRL的输入的第四控制信号时,微控制单元6使d%停留在收到CTRL信号时的值。CTRL信号可以接到电刷的按钮开关上,这样用户便可以通过按开关来进行无级调力度,使声波电机的振动力度停留在自己想要的值上。
因此,本实施例中通过连续线性增大/减小声波电机的驱动信号的频率/电压有效值,来实现无级调节声波电机振动频率和振动力度的控制方法,这种方法是一种控制电路逻辑算法。通过这种控制方法,当电动牙刷工作时,用户可以让电刷的声波电机停在任意一个自己想要的频点/力度点。进一步的,这个算法的技术基础是:由于声波电机的特性,在其两端加正向压降时,电机会向正向偏转;在其两端加负向压降时,电机会向负向偏转。一个平均电压为0V的规律交流电信号(通常是方波),就可以让声波电机实现来回振动。声波电机的振动频率就是该交流电信号的频率,而声波电机的振动力度则和该交流电信号的电压有效值正相关。所以增大交流信号的频率,则声波电机的振动频率会同步增大;增大交流信号的电压有效值,则声波电机的振动力度会同步增大。
通过随着时间的变化来调节占空比或频率的方式,可以在操作时只需要用户长按开关按键,根据开关按键的时长来调节电机的工作状态,也就是说在本专利中只需要一个按键实际上就可以实现无级的调速和调力度。避免了用户在有限的手柄上操作多个按键,这样用户在刷牙时就可以调节力度并同时通过口腔感知该力度是否合适。
本实施例中通过线性调节驱动声波电机的交流方波信号的频率和占空比,来实现声波电机振动频率和振动力度的无级调节方法,同时也可以响应用户的控制,使声波电机的振动频率和振动力度停留在用户想要的频点/力度点上,从而达到了使声波电机的振动频率和振动力度可以无级调节,用户可以选择任意一个想要的频点/力度点,而不再局限于预设的频点/力度点的技术效果。
本发明实施例中的上述一个或多个技术方案,至少具有如下一种或多种技术效果:
本发明实施例提供的一种用于调节声波电机振动的控制电路及方法,所述控制电路包括:微控制单元、H桥单元和声波电机,其中,H桥单元与微控制单元连接,且,H桥单元的电源正极端与电源正极VCC连接,H桥单元的电源负极端接地,进而将声波电机与H桥单元连接,通过H桥单元为声波电机提供交流方波驱动信号。当微控制单元MCU的四个引脚的输出状态在状态1和状态2之间周期性切换时,令微控制单元在状态1和状态2之间切换的频率为f。若f固定不变,则声波电机的振动频率亦为固定频率;若f做线性变化,则声波电机的振动频率也会随着做线性变化。当f随着时间先逐渐增大,再逐渐减小,则可以得到的声波电机两端的电压波形。当微控制单元的CTRL引脚接收到输入的控制信号时,便使f开始做线性变化,当再次接收到CTRL的输入控制信号时,微控制单元使f停留在收到CTRL信号时的频率。CTRL信号可以接到电刷的按钮开关上,这样用户便可以通过按开关来进行无级调频,使声波电机的振动频率停留在自己想要的频率上,从而解决了现有技术中的电动牙刷每个挡位的交流驱动信号的模式不能随意调节,造成用户只能在电动牙刷预设的模式之间切换,无法任意调节电动牙刷的频率和/或力度的技术问题,达到了智能化程度高,声波电机的振动频率和振动力度可以无级调节,用户可以选择任意一个想要的频点/力度点的技术效果。
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
显然,本领域的技术人员可以对本发明实施例进行各种改动和变型而不脱离本发明实施例的精神和范围。这样,倘若本发明实施例的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 一种用于调节声波电机振动的控制方法
- 一种用于调节声波电机振动的控制电路及方法