微波阵列快速成像方法
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及目标探测与成像识别领域,特别涉及一种微波阵列快速成像方法。
背景技术
在微波成像领域,现有的技术类型主要分为以下四类:
第一类以传统雷达技术为代表,探测设备通过大孔径阵列形成极窄的探测波束,用多个波位去覆盖所需要探测的空间区域,从而获得目标的像。存在的主要缺点是需要大孔径阵列,所需成像时间较长,并且成本较高。
第二类以现代雷达技术为代表,合成孔径(SAR)和逆合成孔径(ISAR)是两种主要形式,通过单个天线或一维阵列的运动,形成等效的大孔径阵列,通过对不同位置的接收信号的综合分析获得目标的像。存在的主要缺点是需要目标与阵列单元之间存在不同的相对运动,所需成像时间较长,运动补偿较困难。
第三类以焦平面成像技术为代表,主要通过微波透镜或微波阵列透镜在焦平面上形成目标的像,然后用精密的传感器在焦平面处提取目标的成像信息。存在的主要缺点是成像效果不理想,成像分辨率较低,高精度传感器研制难度大。
第四类以近场微波全息成像技术为代表,其采用类似于激光全息成像的技术,通过参考照射源获取目标全息信息,通过三维空间谱获得目标的像。存在的主要缺点是成像时间较长,成像质量有待提高。
综上所述,微波成像领域,现有技术在成本和普适性等方面存在不足,需要开发低成本、高实时性、高精度的探测与成像识别技术。
发明内容
本发明的目的是提供一种高实时性、高精度的微波阵列快速成像方法。
本发明的微波阵列快速成像方法,包括:
基于透镜成像原理,结合电磁场理论,根据天线阵列接收到的目标散射信号,通过单元信号的幅度、相位加权,采用高效并行算法,获得目标对应的像场分布;
以高效并行算法对阵列接收信号进行成像计算,实现宽视角、实时、多目标成像与探测,获得目标的位置、形状信息。
本发明的微波阵列快速成像方法,其中,包括:
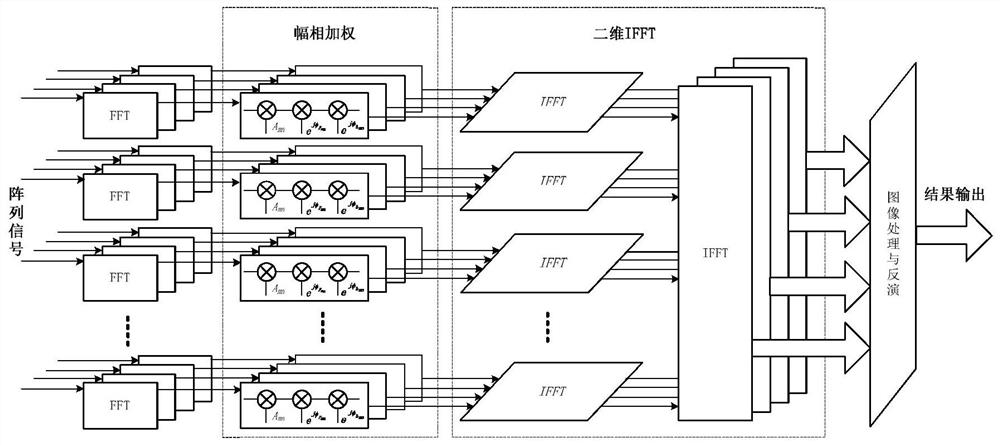
步骤一:对阵列单元接收的时域信号进行快速傅立叶变换,将时域信号转换为频域信号;
步骤二:对阵列单元频域信号进行幅度加权以降低副瓣电平;
步骤三:对阵列单元频域信号进行扫描相位加权以改变成像系统中心视角方向;
步骤四:对阵列单元频域信号进行自动对焦相位加权或定焦相位加权以实现成像聚焦;
步骤五:采用高效并行算法,对阵列单元的频域信号进行快成像处理;
步骤六:解算像场坐标,对像场进行反演获得真实目标的位置、形状参数。
本发明的微波阵列快速成像方法,其中,通过单元信号的幅度、相位加权,采用高效并行算法,获得目标对应的像场分布包括:
在小角度成像条件下,由阵列单元的信号幅度、相位加权后获得像场,包括:
分别建立目标坐标系o-ζξz、阵列坐标系o-xyz、像场坐标系o-δσz,在小角度成像条件下,像场计算公式为:
其中
本发明的微波阵列快速成像方法,其中,在宽视角成像条件下,高精度像场计算公式为:
其中,ω
本发明的微波阵列快速成像方法,其中,所述幅度加权的方法包括并且不限于均匀分布、余弦加权、汉明窗、Taylor分布、切比雪夫分布等幅度加权方式。
本发明的微波阵列快速成像方法,其中,所述扫描相位加权调整成像系统中心视角方向中,扫描相位加权的相位计算公式为:
其中,
其中,θ
本发明的微波阵列快速成像方法,其中,,步骤四包括:利用自动对焦相位加权方法或定焦相位加权方法,对阵列单元频域信号进行聚焦相位加权实现成像聚焦,自动对焦相位加权的聚焦相位计算公式为:
其中,U为物距,即散射源所在平面到阵列所在平面的距离;
定焦相位加权的聚焦相位计算公式为:
其中,F为焦距,且F 本发明的微波阵列快速成像方法,其中,步骤五包括:采用高效并行算法,对阵列单元的副度、相位加权后的频域信号进行快速成像处理,所述高效并行算法包含并且不局限于二维FFT、IFFT、非均匀FFT、稀疏FFT,计算公式为:
其中符号 上述像场计算结果对应的ω
本发明的微波阵列快速成像方法,其中,步骤六包括:对高效并行算法获得的像场进行坐标解算,并对像场进行坐标反演,获得真实目标的分布情况,对于IFFT类的高效并行算法,像场扫描角坐标计算公式为:
对于FFT类的高效并行算法,像场扫描角坐标计算公式为:
像的直角坐标计算公式为: δ=Vtanθ σ=Vtanθ 真实目标的坐标反演计算公式为:
本发明的微波阵列快速成像方法,快速成像方法用于有源相控阵雷达成像,实现宽视角实时目标探测,包括: 选取U=∞,则有φ
采用本发明的微波阵列快速成像方法的高效并行算法计算像场,通过一次运算获得宽视角范围内的目标分布情况。 本发明的微波阵列快速成像方法是一种低成本、高实时性、高精度的探测与成像识别技术的快速成像方法,本发明的微波阵列快速成像方法具有良好的成像效果。 附图说明 图1为阵列成像系统的组成框图; 图2为阵列成像系统的工作流程图; 图3为本发明的微波阵列快速成像方法的流程框图; 图4为本发明的微波阵列快速成像方法的原理示意图及其坐标系; 图5为利用本发明的微波阵列快速成像方法对十字形金属散射体的余弦幅度加权成像结果; 图6为利用本发明的微波阵列快速成像方法对十字形金属物的定焦成像结果; 图7为利用本发明的微波阵列快速成像方法对十字形金属物的自动对焦成像结果; 图8为利用本发明的微波阵列快速成像方法扫描配相成像结果(中心视角方向始终指向图像的中心位置); 图9为利用本发明的微波阵列快速成像方法干扰和目标的雷达成像仿真结果。 具体实施方式 本发明的微波阵列快速成像方法,包括: 基于透镜成像原理,结合电磁场理论,根据天线阵列接收到的目标散射信号,通过单元信号的幅度、相位加权,采用高效并行算法,获得目标对应的像场分布; 以高效并行算法对阵列接收信号进行成像计算,实现宽视角、实时、多目标成像与探测,获得目标的位置、形状信息。 本发明的微波阵列快速成像方法,其中,包括: 步骤一:对阵列单元接收的时域信号进行快速傅立叶变换,将时域信号转换为频域信号; 步骤二:对阵列单元频域信号进行幅度加权以降低副瓣电平; 步骤三:对阵列单元频域信号进行扫描相位加权以改变成像系统中心视角方向; 步骤四:对阵列单元频域信号进行自动对焦相位加权或定焦相位加权以实现成像聚焦; 步骤五:采用高效并行算法,对阵列单元的频域信号进行快成像处理; 步骤六:解算像场坐标,对像场进行反演获得真实目标的位置、形状参数。 本发明的微波阵列快速成像方法,其中,通过单元信号的幅度、相位加权,采用高效并行算法,获得目标对应的像场分布包括: 在小角度成像条件下,由阵列单元的信号幅度、相位加权后获得像场,包括: 分别建立目标坐标系o-ζξz、阵列坐标系o-xyz、像场坐标系o-δσz,在小角度成像条件下,像场计算公式为:
其中
本发明的微波阵列快速成像方法,其中,在宽视角成像条件下,高精度像场计算公式为:
其中,ω 本发明的微波阵列快速成像方法,其中,所述幅度加权的方法包括并且不限于均匀分布、余弦加权、汉明窗、Taylor分布、切比雪夫分布等幅度加权方式。 本发明的微波阵列快速成像方法,其中,所述扫描相位加权调整成像系统中心视角方向中,扫描相位加权的相位计算公式为:
其中,
其中,θ
本发明的微波阵列快速成像方法,其中,,步骤四包括:利用自动对焦相位加权方法或定焦相位加权方法,对阵列单元频域信号进行聚焦相位加权实现成像聚焦,自动对焦相位加权的聚焦相位计算公式为:
其中,U为物距,即散射源所在平面到阵列所在平面的距离; 定焦相位加权的聚焦相位计算公式为:
其中,F为焦距,且F 本发明的微波阵列快速成像方法,其中,步骤五包括:采用高效并行算法,对阵列单元的副度、相位加权后的频域信号进行快速成像处理,所述高效并行算法包含并且不局限于二维FFT、IFFT、非均匀FFT、稀疏FFT,计算公式为:
其中符号 上述像场计算结果对应的ω
本发明的微波阵列快速成像方法,其中,步骤六包括:对高效并行算法获得的像场进行坐标解算,并对像场进行坐标反演,获得真实目标的分布情况,对于IFFT类的高效并行算法,像场扫描角坐标计算公式为:
对于FFT类的高效并行算法,像场扫描角坐标计算公式为:
像的直角坐标计算公式为: δ=Vtanθ σ=Vtanθ 真实目标的坐标反演计算公式为:
本发明的微波阵列快速成像方法,快速成像方法用于有源相控阵雷达成像,实现宽视角实时目标探测,包括: 选取U=∞,则有φ
采用本发明的微波阵列快速成像方法的高效并行算法计算像场,通过一次运算获得宽视角范围内的目标分布情况。 本发明的微波阵列快速成像方法,能够实现实时宽视场高精度成像。 如图1所示,微波阵列快速成像系统包括接收天线阵、发射天线、数字化接收机、本振、发射机、信号处理系统和显示控制系统,接收天线阵用来接收目标散射场,接收天线阵为实孔径阵列或合成孔径阵列;发射天线用来发射射频探测信号;数字化接收机用来处理阵列接收到的信号,并将其离散化为数字信号;本振用来生成射频相参信号;发射机用来放大射频信号,获得大功率射频信号;信号处理系统用来对阵列信号进行处理,实现快速成像;显示控制系统用来显示成像结果、提供人机交互接口、系统同步与控制。 结合图2所示,本发明的微波阵列快速成像方法,包括: 步骤一:系统初始化; 步骤二:发射探测信号; 步骤三:接收回波信号; 步骤四:判定是否进行宽视角成像,“是”则进行宽视角成像处理,“否”则转步骤五; 步骤五:判断是否进行定角度精细成像,“是”则转下一步,“否”则转步骤七; 步骤六:判断是否进行雷达信号处理模式,“是”则雷达信号处理,“否”则定角度精细成像; 步骤七:判断是否重新成像;“是”则转步骤四,“否”则转下一步; 步骤八:判断是否结束,“是”则转步骤二,“否”则转下一步; 步骤九:结束。 结合图3、图4所示,本发明的微波阵列快速成像方法,包括: 步骤一:对阵列单元接收的时域信号进行快速傅立叶变换,将时域信号转换为频域信号; 步骤二:对阵列单元频域信号进行幅度加权; 步骤三:对阵列单元频域信号进行扫描相位加权; 步骤四:对阵列单元频域信号进行聚焦相位加权; 步骤五:对阵列单元频域信号采用高效并行算法进行成像处理; 步骤六:图像反演与显示。 本发明的微波阵列快速成像方法,其中,宽视角成像的工作流程为: 步骤一:对阵列单元的时域回波信号进行FFT,将其变换为频域信号; 步骤二:根据图像保真要求,设置合适的余弦加权参数,对频域信号进行幅度加权; 步骤三:根据重点观察方向要求,设置合适的中心视角方向对应的扫描角参数,对幅度加权后的信号进行扫描相位加权; 步骤四:根据是否具有目标距离信息以及工作状态参数,对描相位加权后的信号进行自动对焦相位加权或定焦相位加权; 步骤五:根据视场范围参数、分辨率要求,设置合适的IFFT点数参数,并根据需要对聚焦相位加权后的数据进行补零处理; 步骤六:对补零处理后的阵列信号,采用高效并行算法进行快成像处理; 步骤七:解算像场坐标,对像场进行反演获得真实目标的位置、形状参数。 本发明的微波阵列快速成像方法,其中,定角精细成像的工作流程为: 步骤一:对阵列单元的时域回波信号进行FFT,将其变换为频域信号; 步骤二:根据图像保真要求,设置合适的余弦加权参数,对频域信号进行幅度加权; 步骤三:根据精细成像方向要求,设置合适的中心视角方向对应的扫描角参数,对幅度加权后的信号进行扫描相位加权; 步骤四:根据是否具有目标距离信息以及工作状态参数,对描相位加权后的信号进行自动对焦相位加权或定焦相位加权; 步骤五:根据视场范围参数、分辨率要求,设置较大的IFFT点数参数,并根据需要对聚焦相位加权后的数据进行补零处理; 步骤六:对补零处理后的阵列信号采用高效并行算法进行成像处理; 步骤七:解算像场坐标,对像场进行反演获得真实目标的位置、形状参数。 本发明的微波阵列快速成像方法,其中,阵列单元的相移计算公式为:
其中,k=2π/λ,λ为波长,F为等效透镜的焦距,R 本发明的微波阵列快速成像方法,其中,在薄透镜情况下,阵列单元的相移可采用等效简化公式计算:
本发明的微波阵列快速成像方法,其中,阵列单元到像点的传播相移计算公式为:
其中,V为像距,即成像平面到阵列所在平面的距离,(δ,σ)为像点的坐标。 本发明的微波阵列快速成像方法,其中,当像点在轴线附近,阵列单元到像点的传播相移可采用等效简化公式计算:
本发明的微波阵列快速成像方法,其中,对于理想阵列透镜成像系统,其归一化像场为:
其中, 本发明的微波阵列快速成像方法,其中,对于理想点源目标,其中心像斑的半径为:
本发明的微波阵列快速成像方法,其中,对于理想点源目标,其像场中心像斑相对阵列中心的视场角为:
本发明的微波阵列快速成像方法,其中,通过阵列单元的幅度、相位加权,在小角度成像条件下,像场计算公式为:
其中 本发明的微波阵列快速成像方法,其中,在宽视角成像条件下,高精度像场计算公式为:
其中,ω 采对阵列单元频域信号进行幅度加权以降低副瓣电平,所述幅度加权方法包括并且不限于均匀分布、余弦加权、汉明窗、Taylor分布、切比雪夫分布等幅度加权方式。 一种余弦加权公式为:
其中α为阵列边缘的最小加权值,可根据需要选择α=0.05~0.2或α=0.7~1。 本发明的微波阵列快速成像方法,其中,阵列成像系统,通过扫描相位加权调整成像系统中心视角方向,扫描相位加权的相位计算公式为:
其中,
其中,θ
本发明的微波阵列快速成像方法,其中,阵列成像系统,利用自动对焦相位加权或定焦相位加权方法,对阵列单元频域信号进行聚焦相位加权实现成像聚焦,自动对焦相位加权的聚焦相位计算公式为:
其中,U为物距,即散射源所在平面到阵列所在平面的距离,参数U可以根据脉冲测距法获得,也可以采用连续波测距法获得。 定焦相位加权的聚焦相位φ
焦距参数F,F 本发明的微波阵列快速成像方法,其中,阵列成像系统,采用高效并行算法,对阵列单元的副度、相位加权后的频域信号进行快速成像处理,所述高效并行算法包含并且不局限于二维FFT、IFFT、非均匀FFT、稀疏FFT,计算公式为:
其中符号 上述像场计算结果对应的ω
本发明的微波阵列快速成像方法,其中,阵列成像系统,对高效并行算法获得的像场进行坐标解算,并对像场进行坐标反演,获得真实目标的分布情况: 对于IFFT类的高效并行算法,像场扫描角坐标计算公式为:
对于FFT类的高效并行算法,像场扫描角坐标计算公式为:
像的直角坐标计算公式为: δ=Vtanθ σ=Vtanθ 真实目标的坐标反演计算公式为:
本发明的微波阵列快速成像方法,适用于有源相控阵雷达成像,实现宽视角实时目标探测: 选取U=∞,则有φ
采用上述高效并行算法计算像场,通过一次运算获得宽视角范围内的目标分布情况。 本发明的微波阵列快速成像方法,选取U=∞,ω
如图5、图6、图7、图8所示,下面结合具体成像场景,通过附图和具体示例对本发明的原理和效果作详细描述。以几个较为典型的具体示例为例,但是,不应以示例限定本发明的实际应用以及保护范围。 仿真示例1: 目标模型为十字形金属物,位于阵列法线上,距离阵列中心10m,阵列孔径为2m×2m,单元间距为1.7λ,照射平面波频率为10GHz。第一步利用电磁场仿真软件计算阵列接收到的目标散射场,第二步按本发明的方法编写计算程序,分别进行了幅度加权成像仿真、自动对焦成像仿真、定焦成像仿真。仿真结果表明,本发明提出的快速成像方法具有良好的成像效果,验证了本发明方法的有效性。 仿真示例2: 目标模型为十字形金属物和球形金属物,其中十字形金属物位于阵列的法线上,球体远离阵列法线方向,目标均距离阵列中心10m。阵列孔径为2m×2m,单元间距为1.7λ,照射平面波频率为10GHz。第一步利用电磁场仿真软件计算阵列接收到的目标散射场,第二步按本发明的方法编写计算程序,进行不同中心视角方向的成像仿真。仿真结果表明,本发明提出的改变中心视角方向的成像方法具有良好的成像效果,验证了发明方法的有效性。 仿真示例3: 目标为理想点源,其散射信号强度为0dB,干扰源为理想点源,其信号强度为30dB,天线阵列为半径0.6m的圆形阵,阵列单元的间距为半波长。频率10GHz,目标和干扰的物距U均为1km,目标和干扰之间的距离为150m。利用本发明的方法编写计算程序,进行雷达成像仿真。仿真结果表明,本发明提出的快速成像方法具有良好的成像效果,验证了发明方法的有效性。 通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到本发明可以借助软件加必要的硬件平台的方式来实现。基于这样的理解,上述实施方案可以以软件产品的形式体现出来,该软件产品可以存储在一个非易失性存储介质(可以是CD-ROM,U盘,EPROM,移动硬盘等)中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者嵌入式设备等)执行本发明实施方案所述的方法。 最后应当说明的是:以上叙述仅用以说明本发明的基本技术方案,而非对其限制;尽管参照上述内容对本发明进行了详细的说明,任何熟悉本领域的技术人员可以对前述的技术方案进行修改完善或适当删减,或者对其中部分技术特征进行等同替换,而这些修改或者替换,都应涵盖在本发明的保护范围之内。 阵列成像装置,包括: 阵列成像装置包含接收天线阵、发射天线、数字化接收机、本振、发射机、信号处理系统和显示控制系统。 接收天线阵用来接收目标散射场,接收天线阵可由实孔径阵列或合成孔径阵列构成,实孔径阵列是指阵列由多个天线单元实际构成,合成孔径阵列是指阵列由单个天线光栅扫描构成,或由一维线阵线性扫描构成。实孔径阵列成像速度快,实时性高,合成孔径阵列成像时间受扫描速度影响较大。发射天线用来发射射频探测信号。数字化接收机用来处理阵列接收到的信号,并将其离散化为数字信号。本振用来生成射频相参信号。发射机用来放大射频信号,获得大功率射频信号。信号处理系统用来对阵列信号进行处理,实现快速成像。显示控制系统用来显示成像结果、提供人机交互接口、系统同步与控制等。 阵列成像装置包含宽视角成像、定角度精细成像、雷达信号处理等多个功能状态。 宽视角成像是指成像装置能够对大角度视场范围内的目标成像,用来实现快速目标搜索和检测。定角度精细成像可用来对指定的角度区域实现精细成像,通常用来观察目标成像细节。雷达信号处理是指采用类似雷达的工作体制,采用数字波束合成(DigitalBeam Forming——DBF)实现目标的探测。 阵列成像装置,其工作流程为: 步骤一:系统初始化; 步骤二:发射探测信号; 步骤三:接收回波信号; 步骤四:判定是否进行宽视角成像,“是”则进行宽视角成像处理,“否”则转步骤五; 步骤五:判断是否进行定角度精细成像,“是”则转下一步,“否”则转步骤七; 步骤六:判断是否进行雷达信号处理模式,“是”则雷达信号处理,“否”则定角度精细成像; 步骤七:判断是否重新成像;“是”则转步骤四,“否”则转下一步; 步骤八:判断是否结束,“是”则转步骤二,“否”则转下一步; 步骤九:结束。 本发明的微波阵列快速成像方法,包括: 微波阵列快速成像方法,其主要步骤如下: 步骤一:对阵列单元接收的时域信号进行快速傅立叶变换(Fast FourierTransform——FFT),将时域信号转换为频域信号; 步骤二:对阵列单元频域信号进行幅度加权; 步骤三:对阵列单元频域信号进行扫描相位加权; 步骤四:对阵列单元频域信号进行聚焦相位加权; 步骤五:对阵列单元频域信号进行二维快速傅立叶逆变换(Inverse FastFourier Transform——IFFT); 步骤六:图像反演与显示。 其中调整步骤二、步骤三、步骤四的前后顺序对成像无影响。 阵列成像装置,宽视角成像的工作流程为: 步骤一:对阵列单元的时域回波信号进行FFT,将其变换为频域信号; 步骤二:根据图像保真要求,设置合适的余弦加权参数,对频域信号进行幅度加权; 步骤三:根据重点观察方向要求,设置合适的中心视角方向对应的扫描角参数,对幅度加权后的信号进行扫描相位加权; 步骤四:根据是否具有目标距离信息以及工作状态参数,对描相位加权后的信号进行自动对焦相位加权或定焦相位加权; 步骤五:根据视场范围参数、分辨率要求,设置合适的IFFT点数参数,并根据需要对聚焦相位加权后的数据进行补零处理; 步骤六:对补零处理后的阵列信号进行二维IFFT变换; 步骤七:对二维IFFT变换结果进行处理,反演目标图像。 阵列成像装置,定角精细成像的工作流程为: 步骤一:对阵列单元的时域回波信号进行FFT,将其变换为频域信号; 步骤二:根据图像保真要求,设置合适的余弦加权参数,对频域信号进行幅度加权; 步骤三:根据精细成像方向要求,设置合适的中心视角方向对应的扫描角参数,对幅度加权后的信号进行扫描相位加权; 步骤四:根据是否具有目标距离信息以及工作状态参数,对描相位加权后的信号进行自动对焦相位加权或定焦相位加权; 步骤五:根据视场范围参数、分辨率要求,设置较大的IFFT点数参数,并根据需要对聚焦相位加权后的数据进行补零处理; 步骤六:对补零处理后的阵列信号进行二维IFFT变换; 步骤七:对二维IFFT变换结果进行处理,对精细成像区域的目标图像进行反演。 阵列成像系统,阵列单元的相移计算公式为:
其中,k=2π/λ,λ为波长,F为等效透镜的焦距,R 在薄透镜情况下,阵列单元的相移可采用等效简化公式计算:
阵列成像系统,阵列单元到像点的传播相移计算公式为:
其中,V为像距,即成像平面到阵列所在平面的距离,(δ,σ)为像点的坐标。 在小角度成像情况下,即像点在轴线附近,阵列单元到像点的传播相移可采用等效简化公式计算:
对于理想阵列透镜成像系统,其归一化像场为:
其中, 对于理想阵列透镜成像系统,当M、N足够大时,其归一化像场表现为一个二维冲激函数,实现了对源散射场的抽样。实际的M、N总是有限的,对于理想点源目标,其中心像斑的半径为:
阵列成像系统,对于理想点源目标,其中心像斑相对阵列中心的视场角(主瓣宽度)为:
阵列成像系统,通过阵列单元的幅度、相位加权,在小角度成像条件下,像场计算公式为:
其中 在宽视角成像条件下,上述像场计算公式出现较大误差,改进后的高精度像场计算公式为:
其中,ω 阵列成像系统,可采用幅度加权降低副瓣电平,但可能会导致中心像变宽,图像可能出现模糊失真现象。一种余弦加权公式为:
其中α为阵列边缘的最小加权值。在0.4<α<0.6范围内,能够将副瓣电平降低18~25dB左右并且不出现明显的图像模糊。0<α<0.2范围内,能够将副瓣电平降低30dB左右,但可能会出现图像模糊现象。对于图像失真要求不高的场合,可以选择α=0.05~0.2,对于图像保真要求较高的场合,可以选择α=0.7~1。 阵列成像系统,可通过扫描相位加权调整成像系统中心视角方向,扫描相位加权的相位计算公式为:
其中,
其中,θ
阵列成像系统,利用自动对焦相位加权或定焦相位加权方法,对阵列单元频域信号进行聚焦相位加权实现成像聚焦,自动对焦相位加权的聚焦相位计算公式为:
其中,U为物距,即散射源所在平面到阵列所在平面的距离,参数U可以根据脉冲测距法获得,也可以采用连续波测距法获得。 定焦相位加权的聚焦相位φ
焦距参数F,F 阵列成像系统,采用高效并行算法,对阵列单元的副度、相位加权后的频域信号进行快速成像处理,所述高效并行算法包含并且不局限于二维FFT、IFFT、非均匀FFT、稀疏FFT,计算公式为:
其中符号 上述像场计算结果对应的ω
阵列成像系统,对高效并行算法获得的像场进行坐标解算,并对像场进行坐标反演,获得真实目标的分布情况: 对于IFFT类的高效并行算法,像场扫描角坐标计算公式为:
对于FFT类的高效并行算法,像场扫描角坐标计算公式为:
像的直角坐标计算公式为: δ=Vtanθ σ=Vtanθ 真实目标的坐标反演计算公式为:
本发明的微波阵列快速成像方法,适用于有源相控阵雷达成像,实现宽视角实时目标探测: 选取U=∞,则有φ
结合图9所示,采用高效并行算法计算像场,通过一次运算获得宽视角范围内的目标分布情况。改方法可用于相控阵雷达的宽视角多目标快速搜索,尤其适用于导引头、引信等近距离宽视场实时探测系统。 选取U=∞,ω
上述公式也可用于数字波束合成(DBF)。此时阵列成像系统,退化为传统相控阵雷达体制,可用于对远程目标的搜索和跟踪。
- 微波阵列快速成像方法
- 基于随机天线阵列和微波关联成像原理的高分辨率穿墙成像系统和方法