一种变模态的技术验证机
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及飞行器设计领域,具体涉及一种变模态的技术验证机。
背景技术
可垂直起降飞行器由于对跑道依赖小,在军、民用领域得到高度重视,各种类型的飞行器层出不穷,其中就包括了兼顾垂直悬停与高速前飞的倾转旋翼飞行器。此类飞行器具备与直升机类似的大直径旋翼,根据飞行状态的需要将旋翼或动力短舱沿着固定的轴线进行倾转,实现模态转换。在变模态过程中,对旋翼的控制提出了更高的要求,而且该过程为动态过程,地面试验无法模拟,风险高,难度大,因此需要设计一款专用的技术验证机用于倾转过程的控制优化设计。
发明内容
本发明的目的是提供一种变模态的技术验证机,用以解决现有验证机在进行高难度、高风险试验项目时所存在的安全问题,同时可创造不同的风向条件,提升系统的鲁棒性。
为了实现上述任务,本发明采用以下技术方案:
一种变模态的技术验证机,包括机身、机翼、平尾、垂尾、动力单元、主旋翼以及辅助涵道,其中:
所述机身采用钢梁结构,并通过拉索加强,机身分为前部、中部、后部三段,其中机身中部的两侧设置有机翼,并在机翼的外侧安装有动力单元,动力单元上安装所述主旋翼;所述主旋翼叶片的半径小于所述机翼的长度;所述机身前部、后部沿远离机身中部的方向外径逐渐减小,机身前部的前端设置有第一连接段,第一连接段的两侧设置所述辅助涵道;机身后部的后端设置有第二连接段,第二连接段的长度大于第一连接段,第二连接段的前部两侧对称设置辅助涵道,第二连接段的后部两侧设置有平尾,平尾两侧对称设置有垂尾。
进一步地,所述主旋翼通过倾转机构连接在动力单元上,主旋翼在复位状态下其旋转轴垂直于机翼,所述倾转机构用于驱动主旋翼沿平行于机翼前缘轴线旋转,旋转范围为0°~110°。
进一步地,所述第一连接段两侧对称设置支撑架,所述辅助涵道的涵道环固定在支撑架上,涵道环的轴向垂直于水平面布设;涵道环中通过涵道电机安装有涵道桨叶。
进一步地,所述支撑架为可拆卸式的连接结构,在过渡状态控制技术优化之后,可通过支撑架拆卸掉辅助涵道。
进一步地,所述平尾、垂尾、机翼上均布设有控制舵面,用于飞行过程中的姿态控制。
进一步地,所述机身上布置有姿态传感器、角度度传感器、角加速度传感器、高度传感器、速度传感器,并在机身内设置飞控系统、电源系统。
进一步地,在利用验证机进行飞行试验时,为了防止主旋翼转速不一致带来的拉力不均衡,辅助涵道根据各传感器采集的信息对飞机的姿态进行调节。
进一步地,在垂直起降到定直平飞,或从定直平飞到垂直起降过程中,主旋翼根据飞行速度进行倾转,倾转时,通过高度信息判断主旋翼的拉力与机翼的升力之和不足以平衡飞机的重力时,辅助涵道根据飞机的高度传感器信息及时补充剩余的拉力。
进一步地,当外界扰动使飞机姿态发生较大改变而不能保持定直平飞或稳定悬停时,辅助涵道根据飞机的姿态传感器信息、角速度传感器信息、角加速度传感器信息、高度传感器信息对飞机的姿态及飞行高度进行调节。
进一步地,当验证机进入失速、涡环、发动机失效等故障状态时,通过辅助涵道提供足够的拉力,来保证飞机安全降落;
当主旋翼正常工作时,通过调节辅助涵道的拉力,可人为制造升力不对称的飞行环境,此时通过主旋翼的自主控制来调整飞机姿态,以检验主飞控系统的鲁棒性和适应性。
与现有技术相比,本发明具有以下技术特点:
该验证机在过渡模态控制技术迭代过程中,通过在验证机机身周围布置的辅助涵道,消除因为控制技术的不完善带来的飞行安全隐患。在过渡模态控制技术优化过程中,通过在验证机机身周围布置的辅助涵道可提供不同的扰动,提升过渡模态控制技术的鲁棒性。
附图说明
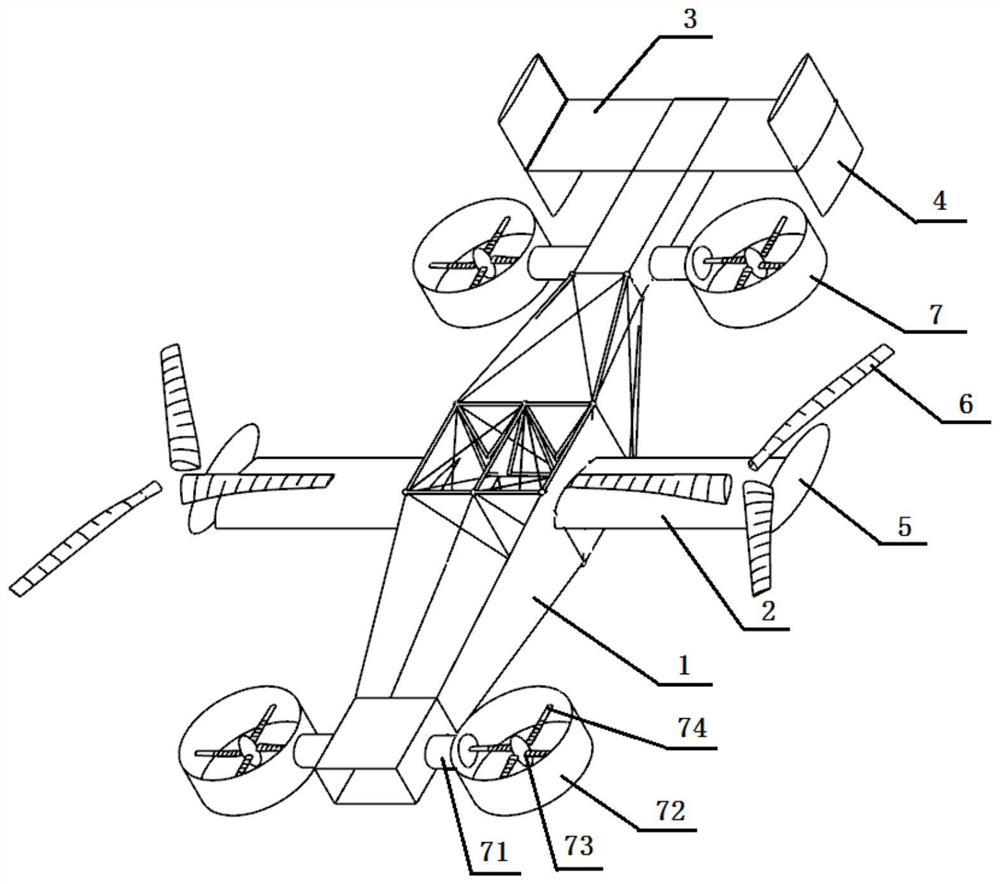
图1为本发明的整体结构示意图。
图中标号说明:1机身,2机翼,3平尾,4垂尾,5动力单元,6主旋翼,7辅助涵道,71支撑架,72涵道环,73涵道电机,74涵道桨叶。
具体实施方式
参见图1,本发明提供了一种变模态的技术验证机,包括机身1、机翼2、平尾3、垂尾4、动力单元5、主旋翼6以及辅助涵道7,其中:
所述机身1采用钢梁结构,并通过拉索加强,机身1分为前部、中部、后部三段,其中机身1中部的两侧设置有机翼2,并在机翼2的外侧安装有动力单元5,动力单元5上安装所述主旋翼6;所述主旋翼6叶片的半径小于所述机翼2的长度;所述机身1前部、后部沿远离机身1中部的方向外径逐渐减小,机身1前部的前端设置有第一连接段,第一连接段的两侧设置所述辅助涵道7;机身1后部的后端设置有第二连接段,第二连接段的长度大于第一连接段,第二连接段的前部两侧对称设置辅助涵道7,第二连接段的后部两侧设置有平尾3,平尾3两侧对称设置有垂尾4。
所述主旋翼6通过倾转机构连接在动力单元5上,主旋翼6在复位状态下其旋转轴垂直于机翼2,所述倾转机构用于驱动主旋翼6沿平行于机翼2前缘轴线旋转,旋转范围为0°~110°。
所述第一连接段两侧对称设置支撑架71,所述辅助涵道7的涵道环72固定在支撑架71上,涵道环72的轴向垂直于水平面布设;涵道环72中通过涵道电机73安装有涵道桨叶74。
所述支撑架71为可拆卸式的连接结构,在过渡状态控制技术优化之后,可通过支撑架71拆卸掉辅助涵道7。
所述平尾3、垂尾4、机翼2上均布设有控制舵面,用于飞行过程中的姿态控制。
所述机身1上布置有姿态传感器、角度传感器、角加速度传感器、高度传感器、速度传感器,并在机身1内设置飞控系统、电源系统。
在利用验证机进行飞行试验时,为了防止主旋翼6转速不一致带来的拉力不均衡,辅助涵道7根据各传感器采集的信息对飞机的姿态进行调节:
在垂直起降到定直平飞,或从定直平飞到垂直起降过程中,主旋翼6根据飞行速度进行倾转,倾转时,通过高度信息判断主旋翼6的拉力与机翼2的升力之和不足以平衡飞机的重力时,辅助涵道7根据飞机的高度传感器信息及时补充剩余的拉力。
当外界扰动使飞机姿态发生较大改变(不能保持定直平飞或稳定悬停)时,辅助涵道7根据飞机的姿态传感器信息、角速度传感器信息、角加速度传感器信息、高度传感器信息对飞机的姿态及飞行高度进行调节。
当验证机进入失速、涡环、发动机失效等故障状态时,通过辅助涵道7提供足够的拉力,来保证飞机安全降落。
当主旋翼6正常工作时,通过调节辅助涵道7的拉力,可人为制造升力不对称的飞行环境,此时通过主旋翼6的自主控制来调整飞机姿态,以检验主飞控系统的鲁棒性和适应性。
以上实施例仅用于说明本申请的技术方案,而非对其限制;尽管参照前述实施例对本申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或替换,并不使相应技术方案的本质脱离本申请各实施例技术方案的精神和范围,均应包含在本申请的保护范围之内。
- 一种变模态的技术验证机
- 一种层流流动控制技术验证机