一种智能PID控制系统
文献发布时间:2023-06-19 10:48:02
技术领域
本发明属于PID控制技术领域,具体涉及一种智能PID控制系统。
背景技术
在现代工业控制中,按照偏差的比例、积分和微分进行控制的PID控制器应用十分广泛,这种闭环控制方法原理简单,易于实现,控制参数相互独立,参数调整起来也比较简单。在单片机等控制器还不是很成熟并且单价较高的时候,通常采用模拟电路进行处理,但是模拟电路中PID参数的整定过程繁琐,每次参数调整需要更换电阻或者电容。
随着数字电路的发展,单片机和编程语言的逐步完善,PID以软件的形式开始被使用,软件PID参数调整方便快捷,使用效率高,但是由于软件算法有一定的计算周期;另外调节效果还依赖采样电路的精度和速度,再加上处理器运行速度的限制,因此虽然参数整定和PID控制器的灵活性提高了,但是损失了整个环路的影响时间。
发明内容
鉴于上述问题,本发明提供克服上述问题或者至少部分地解决上述问题的一种智能PID控制系统。
为解决上述技术问题,本发明提供了一种智能PID控制系统,包括:
PID控制电路,用于实现PID控制;
监控模块,用于监控所述PID控制电路的工作参数;所述监控模块与所述PID控制电路连接;
控制模块,用于根据预设指令和所述监控模块的工作参数调整所述PID控制电路;所述控制模块分别与所述PID控制电路和所述监控模块连接;
电源,用于为所述控制模块供电;所述电源与所述控制模块连接;
交互模块,用于供用户与所述控制模块交互;所述交互模块与所述控制模块连接。
优选地,所述PID控制电路包括:反相比例放大电路、积分运算电路、微分运算电路和反相综合电路,其中,所述反相比例放大电路、所述积分运算电路和所述微分运算电路的输入端均分别与所述监控模块和所述控制模块连接而输出端均与所述反相综合电路的输入端连接,所述反相综合电路的输出端均分别与所述监控模块和所述控制模块连接。
优选地,所述反相比例放大电路包括:数字电位器Rp1、电阻R1、电阻R2、电阻R3和加法器U1,其中,所述数字电位器Rp1的第一端分别与所述监控模块和所述控制模块连接而第二端与所述加法器U1的负输入端连接,所述电阻R1的第一端连接所述加法器U1的负输入端而第二端连接所述加法器U1的输出端,所述电阻R2的第一端连接所述加法器U1的输出端而第二端连接所述反相综合电路的输入端,所述电阻R3的第一端接地而第二端连接所述加法器U1的正输入端。
优选地,所述积分运算电路包括:数字电位器Rp2、电阻R4、电阻R6、电阻R7、电容C1和加法器U2,其中,所述数字电位器Rp2的第一端分别与所述监控模块和所述控制模块连接而第二端连接所述电阻R4的第一端,所述阻R4的第二端连接所述加法器U2的负输入端,所述电阻R6的第一端连接所述加法器U2的输出端而第二端连接所述反相综合电路的输入端,所述电阻R7的第一端接地而第二端连接所述加法器U2的正输入端,所述电容C1的第一端连接所述加法器U2的负输入端而第二端连接所述加法器U2的输出端。
优选地,所述微分运算电路包括:数字电位器Rp3、电阻R9、电阻R10、电阻R11、电阻R12、电容C2、电容C3和加法器U4,其中,所述电阻R12的第一端分别与所述监控模块和所述控制模块连接而第二端连接所述电容C3的第一端,所述电容C3的第二端连接所述加法器U4的负输入端,所述电阻R11的第一端接地而第二端连接所述加法器U4的正输入端,所述电阻R10的第一端连接所述加法器U4的输出端而第二端连接所述反相综合电路的输入端,所述电阻R9的第一端连接所述加法器U4的负输入端而第二端连接所述数字电位器Rp3的第一端,所述数字电位器Rp3的第二端连接所述加法器U4的输出端,所述电容C2的第一端连接所述加法器U4的负输入端而第二端连接所述加法器U4的输出端,所述数字电位器Rp3的滑动端与所述控制模块连接。
优选地,所述反相综合电路包括:电阻R5、电阻R8和加法器U3,其中,所述加法器U3的负输入端分别与所述反相比例放大电路、所述积分运算电路和所述微分运算电路的输出端连接而输出端与所述监控模块连接,所述电阻R5的第一端连接所述加法器U3的负输入端而第二端连接所述加法器U3的输出端,所述电阻R8的第一端连接所述加法器U3的正输入端而第二端接地。
优选地,所述监控模块包括:ADC1、ADC2、ADC3、ADC4和ADC5,其中,所述ADC1与所述PID控制电路的输入端连接,所述ADC2与所述PID控制电路中反相比例放大电路的输出端连接,所述ADC3与所述PID控制电路中积分运算电路的输出端连接,所述ADC4与所述PID控制电路中微分运算电路的输出端连接,所述ADC5与所述PID控制电路中反相综合电路的输出端连接。
优选地,所述控制模块为MCU,所述MCU型号为STM32F103。
优选地,所述电源为线性稳压电源。
优选地,所述交互模块为触摸式工业串口屏。
本发明实施例中的一个或多个技术方案,至少具有如下技术效果或优点:本发明提供的一种智能PID控制系统通过将模拟电路中的关键电阻和电容替换为数控器件,保留了模拟硬件PID电路中环路响应快等优点,又避免了参数整定过程中每次调节参数都需要拆卸焊接在板子上的电阻和电容,使得参数整定过程中电阻值和电容值的调节变得更容易,提高调整效率。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
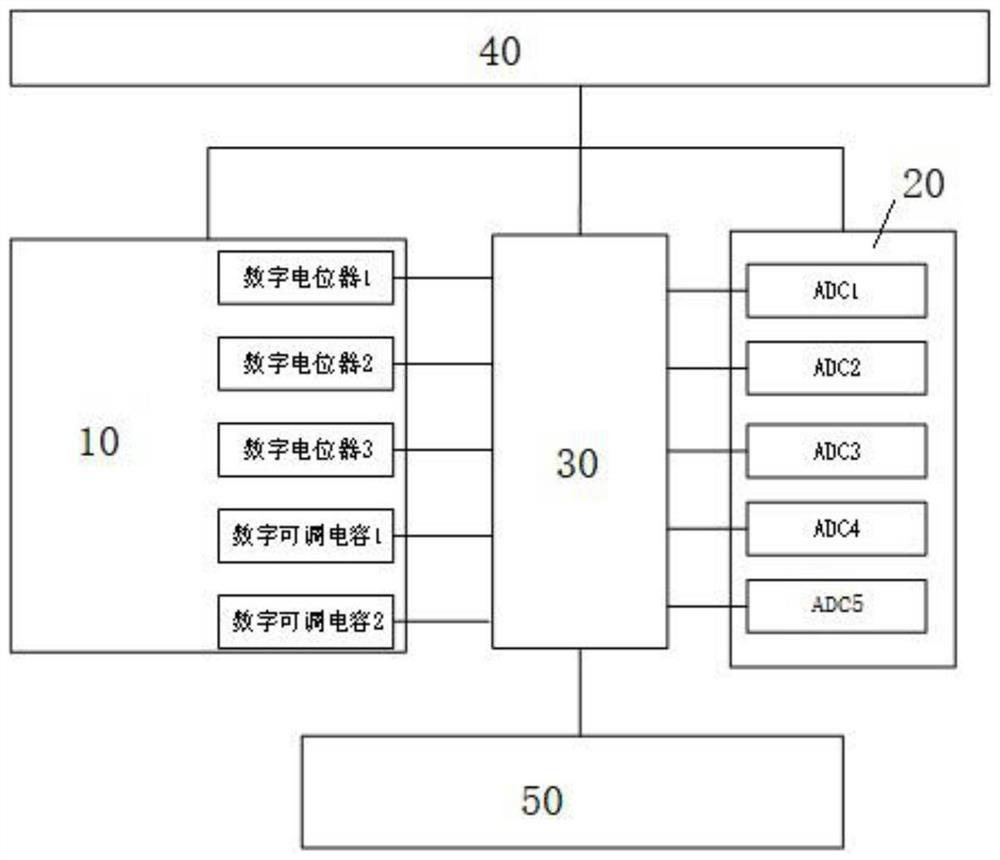
图1是本发明实施例提供的一种智能PID控制系统的原理框图;
图2是本发明实施例提供的一种智能PID控制系统中PID控制电路的示意图。
具体实施方式
下文将结合具体实施方式和实施例,具体阐述本发明,本发明的优点和各种效果将由此更加清楚地呈现。本领域技术人员应理解,这些具体实施方式和实施例是用于说明本发明,而非限制本发明。
在整个说明书中,除非另有特别说明,本文使用的术语应理解为如本领域中通常所使用的含义。因此,除非另有定义,本文使用的所有技术和科学术语具有与本发明所属领域技术人员的一般理解相同的含义。若存在矛盾,本说明书优先。
除非另有特别说明,本发明中用到的各种原材料、试剂、仪器和设备等,均可通过市场购买得到或者可通过现有方法制备得到。
如图1-2,在本申请实施例中,本发明提供了一种智能PID控制系统,包括:
PID控制电路10,用于实现PID控制;
监控模块20,用于监控所述PID控制电路10的工作参数;所述监控模块20与所述PID控制电路10连接;
控制模块30,用于根据预设指令和所述监控模块20的工作参数调整所述PID控制电路10;所述控制模块30分别与所述PID控制电路10和所述监控模块20连接;
电源40,用于为所述控制模块30供电;所述电源40与所述控制模块30连接;
交互模块50,用于供用户与所述控制模块30交互;所述交互模块50与所述控制模块30连接。
在本申请实施例中,用户通过交互模块50设置PID控制电路10的工作参数,然后监控模块20实时监测PID控制电路10的工作参数,并通过控制模块30实时调节PID控制电路10中的器件的工作参数,使得PID控制电路10的工作参数与设置值一致。
如图1-2,在本申请实施例中,所述PID控制电路10包括:反相比例放大电路、积分运算电路、微分运算电路和反相综合电路,其中,所述反相比例放大电路、所述积分运算电路和所述微分运算电路的输入端均分别与所述监控模块20和所述控制模块30连接而输出端均与所述反相综合电路的输入端连接,所述反相综合电路的输出端均分别与所述监控模块20和所述控制模块30连接。
在本申请实施例中,PID控制电路10中比例控制通过反相比例放大电路实现,积分控制通过积分运算电路来实现,微分控制通过微分运算电路来实现,最后通过反相综合电路将三种运算结果进行综合和反相,输出矫正信号。
如图1-2,在本申请实施例中,所述反相比例放大电路包括:数字电位器Rp1、电阻R1、电阻R2、电阻R3和加法器U1,其中,所述数字电位器Rp1的第一端分别与所述监控模块20和所述控制模块30连接而第二端与所述加法器U1的负输入端连接,所述电阻R1的第一端连接所述加法器U1的负输入端而第二端连接所述加法器U1的输出端,所述电阻R2的第一端连接所述加法器U1的输出端而第二端连接所述反相综合电路的输入端,所述电阻R3的第一端接地而第二端连接所述加法器U1的正输入端。
如图1-2,在本申请实施例中,所述积分运算电路包括:数字电位器Rp2、电阻R4、电阻R6、电阻R7、电容C1和加法器U2,其中,所述数字电位器Rp2的第一端分别与所述监控模块20和所述控制模块30连接而第二端连接所述电阻R4的第一端,所述阻R4的第二端连接所述加法器U2的负输入端,所述电阻R6的第一端连接所述加法器U2的输出端而第二端连接所述反相综合电路的输入端,所述电阻R7的第一端接地而第二端连接所述加法器U2的正输入端,所述电容C1的第一端连接所述加法器U2的负输入端而第二端连接所述加法器U2的输出端。
如图1-2,在本申请实施例中,所述微分运算电路包括:数字电位器Rp3、电阻R9、电阻R10、电阻R11、电阻R12、电容C2、电容C3和加法器U4,其中,所述电阻R12的第一端分别与所述监控模块20和所述控制模块30连接而第二端连接所述电容C3的第一端,所述电容C3的第二端连接所述加法器U4的负输入端,所述电阻R11的第一端接地而第二端连接所述加法器U4的正输入端,所述电阻R10的第一端连接所述加法器U4的输出端而第二端连接所述反相综合电路的输入端,所述电阻R9的第一端连接所述加法器U4的负输入端而第二端连接所述数字电位器Rp3的第一端,所述数字电位器Rp3的第二端连接所述加法器U4的输出端,所述电容C2的第一端连接所述加法器U4的负输入端而第二端连接所述加法器U4的输出端,所述数字电位器Rp3的滑动端与所述控制模块30连接。
如图1-2,在本申请实施例中,所述反相综合电路包括:电阻R5、电阻R8和加法器U3,其中,所述加法器U3的负输入端分别与所述反相比例放大电路、所述积分运算电路和所述微分运算电路的输出端连接而输出端与所述监控模块20连接,所述电阻R5的第一端连接所述加法器U3的负输入端而第二端连接所述加法器U3的输出端,所述电阻R8的第一端连接所述加法器U3的正输入端而第二端接地。
在本申请实施例中,系统框图(图1)中的数字电位器1、数字电位器2、数字电位器3、数字可调电容1和数字可调电容2分别代表PID电路图(图2)中的数字电位器RP1、数字电位器RP2、数字电位器RP3、电容C1和电容C3,具体数值可以通过控制模块30调节。由于数字可调电容的调节范围较小,所以在积分运算电路和微分运算电路中同时采用电阻和电容来调整电路参数。
图2中加法器U1组成的反相比例放大电路负责调整环路增益,通过控制模块30中程序调节数字电位器RP1的阻值,可以实现增益(P)的调整。加法器U2组成积分运算电路,通过调整数字电位器RP2和电容C1,可以改变积分运算电路的积分时间常数。加法器U3组成微分运算电路,通过调整电容C3和数字电位器RP3实现微分时间常数的调整。加法器U4将反相比例放大电路、积分运算电路和微分运算电路的输出反相并加在一起合并为PID电路的输出。
在本申请实施例中,数字电位器RP1、RP2和RP3型号为X9C104,所选数字可调电容C1和C3型号为PE64909。
如图1-2,在本申请实施例中,所述监控模块20包括:ADC1、ADC2、ADC3、ADC4和ADC5,其中,所述ADC1与所述PID控制电路10的输入端连接,所述ADC2与所述PID控制电路10中反相比例放大电路的输出端连接,所述ADC3与所述PID控制电路10中积分运算电路的输出端连接,所述ADC4与所述PID控制电路10中微分运算电路的输出端连接,所述ADC5与所述PID控制电路10中反相综合电路的输出端连接。
在本申请实施例中,监控模块20分别监控PID电路输入、反相比例放大电路输出、积分运算电路输出、微分运算电路输出和PID电路输出的电压,给用户进行PID参数整定时提供参考。
在本申请实施例中,所述控制模块30为MCU,所述MCU型号为STM32F103。
在本申请实施例中,所述电源40为线性稳压电源。线性稳压电源可以满足电路需要的性能。
在本申请实施例中,所述交互模块50为触摸式工业串口屏。触摸式工业串口屏具备触摸功能,用户可以通过屏幕查看各关键点电压等电路信息,同时可以通过屏幕触摸调节各电阻值和电容值,从而实现PID电路的调整。
本发明提供的一种智能PID控制系统通过将模拟电路中的关键电阻和电容替换为数控器件,保留了模拟硬件PID电路中环路响应快等优点,又避免了参数整定过程中每次调节参数都需要拆卸焊接在板子上的电阻和电容,使得参数整定过程中电阻值和电容值的调节变得更容易,提高调整效率。
需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。以上所述仅是本申请的具体实施方式,使本领域技术人员能够理解或实现本申请。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本申请的精神或范围的情况下,在其它实施例中实现。因此,本申请将不会被限制于本文所示的这些实施例,而是要符合与本文所申请的原理和新颖特点相一致的最宽的范围。
总之,以上所述仅为本发明技术方案的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种智能PID控制系统
- 一种锂离子电池隔膜浆料甩涂量智能PID控制系统及控制方法