充电线圈单元、动力单元及作业机
文献发布时间:2023-06-19 10:51:07
技术领域
本发明主要涉及充电线圈单元。
背景技术
在设置于内燃机等动力源的飞轮上配置有磁铁以及充电线圈单元(参照专利文献1)。该磁铁与动力源的动力(旋转)一并旋转,充电线圈单元输出与因该磁铁的旋转而产生的磁通变化相应的电压。为了实现与磁通变化相应的电压的输出,通常在充电线圈单元中使用电感器。
现有技术文献
专利文献
专利文献1:日本特开平5-164010号公报
发明内容
发明所要解决的问题
其中,考虑在充电线圈单元中根据需要设置电容器的情况。在该情况下,根据充电线圈的电路结构,输出电压例如有可能因LC振荡而变得不稳定。
本发明的目的在于,在用于输出与动力源的动力相应的电压的充电线圈单元中,使其输出电压稳定化而能够适当地利用。
用于解决课题的手段
本发明的一个方面涉及充电线圈单元,其特征在于,所述充电线圈单元包括:电感器,其基于动力源的动力来产生感应电流;电容器,其与所述电感器串联连接;以及电路部,其被设为能够通过在所述电感器中产生的感应电流对所述电容器进行充电。
发明效果
根据本发明,能够使充电线圈单元的输出电压稳定化。
附图说明
图1是用于说明作业机的结构例的立体图。
图2是用于说明作业机的结构例的框图。
图3是用于说明充电线圈单元的结构例的图。
图4A是用于说明充电线圈单元的动作方式的图。
图4B1是用于说明充电线圈单元的动作方式的图。
图4B2是用于说明充电线圈单元的动作方式的图。
图4B3是用于说明充电线圈单元的动作方式的图。
图5是用于说明充电线圈单元(比较例)的动作方式的图。
图6是用于说明充电线圈单元的另一结构例的图。
具体实施方式
以下,参照附图对本发明的实施方式进行说明。另外,各图是表示实施方式的构造乃至结构的示意图,图示的各构件的尺寸未必反映现实的尺寸。另外,在各图中对相同的要素标注相同的参照编号,在本说明书中省略对重复的内容的说明。
图1是实施方式的作业机M的立体图。图2是表示作业机M的结构的主要部分的框图。作业机M在主体部P0具备作业部1、行驶部2以及电池单元3。作业机M在从主体部P0向后方且上方延伸设置的延伸设置部P1中还具备操作部4。
在本实施方式中,作业部1包括作业机构11、动力单元12、启动器13以及集草袋14。作业机构11是用于实现规定的作业的机构。在本实施方式中,作业机构11是以能够旋转的方式配置于主体部P0下方部的盘状的叶片(参照图1),由此,作为作业的一例,能够进行割草(作业机M也可以称为割草机。)。
动力单元12包括动力源121、飞轮122和充电线圈单元123(参照图2)。在本实施方式中,动力源121为内燃机(发动机),产生用于驱动作业机构11的动力(旋转)。飞轮122配置为根据动力源121的动力能够旋转,使动力源121的旋转稳定化。在本实施方式中,飞轮122与作为动力源121的内燃机的曲轴连结。飞轮122支承未图示的磁铁,通过与该磁铁一起旋转而形成磁通变化。详细情况将在后面叙述,充电线圈单元123构成为能够输出与该磁通变化相应的电压。
另外,作为动力单元12的一部分或者相对于动力单元12,也可以附带地设置HST(Hydro-Static Transmission)等变速器。
启动器13响应于来自电池单元3中包含的后述的控制部31的信号而使动力单元12启动(参照图2)。例如,启动器13以使小齿轮与飞轮122的齿圈卡合的方式配置,通过使该小齿轮旋转,能够实现动力单元12的启动。另外,详细情况将在后面叙述,控制部31能够基于来自上述充电线圈单元123的输出电压而检测出动力单元12已启动。
集草袋14是收容由作业机构11收割的草的收容部,装卸自如地配置在主体部P0后方部(参照图1)。通过这样的结构,作业部1能够执行针对规定的作业区域的作业。
行驶部2包括分别可旋转地配置于主体部P0下方部的一对前轮及一对后轮,由此支承主体部P0(参照图1)。行驶部2能够从动力单元12接受动力而使作业机M行驶。延伸设置部P1的端部构成为棒状来作为把持部(车把)P11(参照图1),用户能够把持该把持部P11而一边按压作业机M一边进行作业。作业机M也可以称为步行式作业机、步行型割草机等。
操作部4受理用于控制作业部1的运转状态的来自用户的输入操作。操作部4设置在对于用户而言容易操作的位置即可。在本实施方式中,操作部4包括杆型操作件41和按钮型操作件42,它们均配置在延伸设置部P1、特别是把持部P11或其周边部(参照图1)。在本实施方式中,杆型操作件41相对于上述棒状的把持部P11可转动地并列设置,用户通过使该杆型操作件41转动来输入操作。在本实施方式中,按钮型操作件42是配置在把持部P11的一端部的自动复位型的按钮式开关,用户通过按压该按钮型操作件42来输入操作。另外,用户对操作部4的输入操作经由电缆、线等作为电信号传递到电池单元3所包含的后述的控制部31。
在本实施方式中,用户一边操作杆型操作件41一边操作按钮型操作件42,从而使作业部1成为运转状态。即,用户在不使杆型操作件41转动的前提下即使按压按钮型操作件42,作业部11也不会成为运转状态。一边操作杆式操作件41一边操作按钮型操作件42的上述操作方式也被称为二级操作等,对于确保使作业部1运转时的安全性是有利的。
在作业部1成为运转状态之后,用户一边维持为操作了杆型操作件41的状态(使杆型操作件41转动的状态)一边使作业机M行驶,由此能够通过运转状态的作业部1进行作业。另外,用户能够通过解除杆型操作件41的操作(例如从杆型操作件41放手)而在期望的时机使作业部1成为停止状态。在本实施方式中,在作业部1的停止状态下,动力单元12成为停止状态且作业机构11也成为停止状态。
作为其他实施方式,作业机构11和动力单元12能够通过离合器进行机械式连结,也可以通过杆型操作件41来控制该离合器的连结/分离。例如,通过操作杆型操作件41,离合器成为连结状态,通过解除该操作,离合器成为分离状态。在该情况下,能够根据杆型操作件41的上述操作的解除,在不停止动力单元12的情况下切断该动力向作业机构11的传递。
操作部4可以在延伸设置部P1或主体部P0中进一步包括其他操作件。作为其例子,可举出用于调整作为作业机构11的盘状的叶片的高度的操作件、用于变更动力单元12的输出等级的操作件、以及用于对行进部2进行制动的操作件等。
电池单元3包括电池30和控制部31,在本实施方式中,它们被单元化而成。通过电池30和控制部31的单元化,电池单元3的处理(例如,将电池单元3组装于主体部P0的情况下的操作等)变得容易。在此,为了简化说明,示出了单一的电池30,但电池30的数量也可以为2以上。例如,电池单元3可以由串联连接的多个电池30和控制部31一起收纳于规定的壳体来构成。
控制部31是从电池30接受电力、并基于用户对操作部4的输入操作,进行作业机M的各要素的控制、例如上述作业部1的驱动控制等的电气部件。控制部31也可以被称为控制装置、控制基板等,例如,除了安装有电子部件的1个以上的安装基板之外,还可以包括用于实现要素间的电连接的配线部。作为电子部件的例子,可以举出ASIC(专用集成电路)、PLD(可编程逻辑器件)、所谓的分立部件等半导体装置。作为布线部的例子,可举出线束、FPC(柔性印刷布线基板)、CoF(覆晶薄膜)等。
在本实施方式中,控制部31包括运算部(信号处理电路部)310、检测用电路部311以及312、启动用电路部313以及电源电路部314(参照图2)。另外,在本说明书中,电路部是指将1个以上的无源元件或者有源元件电连接为能够实现规定的功能的要素,因此,各电路部可以分离成几个部分进行设置,也可以与其他的电路部接近地设置。
运算部310是基于电池30的电力进行用于进行作业机M整体的系统控制的信号处理的MCU(Micro Controlloer Unit)或MPU(Micro Processing Unit)。在运算部310中,例如可以使用RAJ240100(瑞萨电子株式会社)等规定的电池管理IC(Integrated Circuit)。
在检测用电路部311中可以使用能够检测输入到杆型操作件41的操作的1个以上的输入电路IC。检测用电路部311向运算部310供给表示对杆型操作件41输入了操作的电信号。
检测用电路部312可以使用能够检测输入到按钮型操作件42的操作的1个以上的输入电路IC。检测用电路部312向运算部310供给表示对杆型操作件42输入了操作的电信号。
运算部310响应于从检测用电路部311以及312双方接收到信号这一情况,将规定的启动信号输出到启动用电路部313,使用启动器13使动力单元12启动。动力单元12的动力向作业机构11传递,作业机构11成为驱动状态,即,作业部1成为运转状态。
电源电路部314基于电池30的电压生成1个以上的电源电压,将该/这些电源电压提供给运算部310。电源电路部314可以设置为能够通过规定的分压电路对电池30的电压进行分压,也可以代替于此,将包含DC-DC转换器等的电源IC用作电源电路部314。在此,为了简化说明,表现为电压(电源电压),但也可以考虑驱动电流等电流成分而表现为电力。另外,运算部310内置有调节器,也能够基于从电源电路部314接受的电源电压进一步生成其他的电源电压。
电池30使用锂离子电池、镍氢电池等能够充电的二次电池。在此,充电线圈单元123与控制部31电连接,控制部31能够基于来自充电线圈单元123的输出电压对电池30进行充电。以下,参照图3~图4B3对该情况进行叙述。
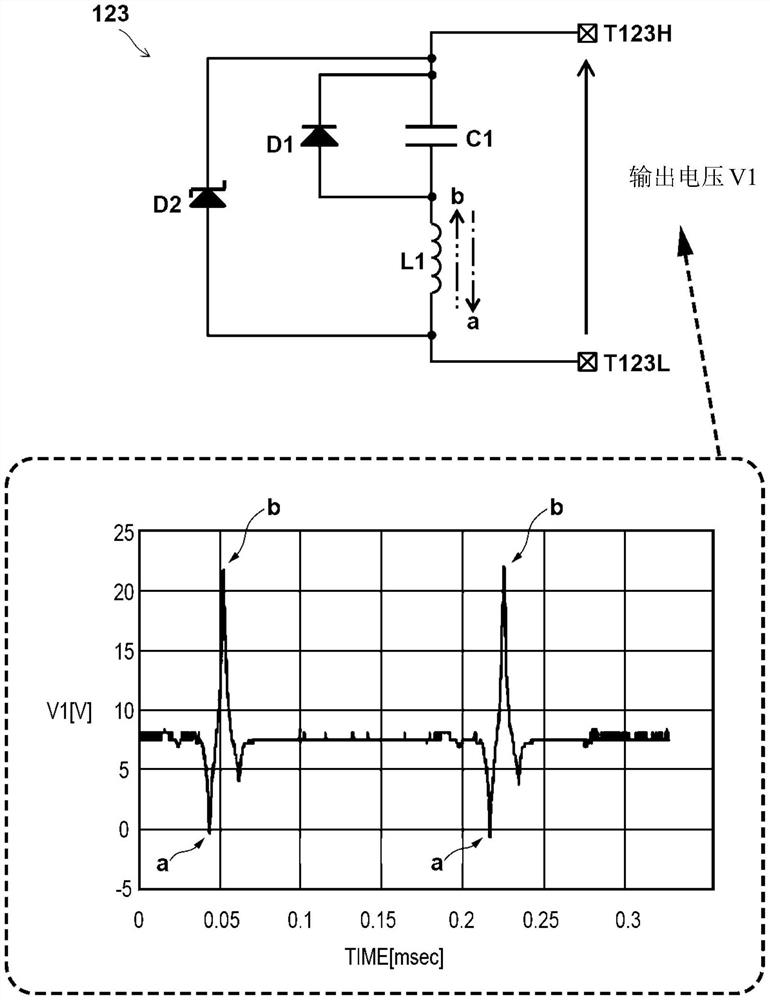
图3是用于说明充电线圈单元123的结构例的图。充电线圈单元123经由规定的配线部901及902与控制部31电连接。
充电线圈单元123包括电感器L1、电容器C1以及电路部1231。电感器L1以及电容器C1相互串联连接。在本实施方式中,电感器L1配置于低电压侧(接地侧),电容器C1配置于高电压侧(电源电压侧)。电路部1231设置为能够以在电感器L1中产生的感应电流对电容器C1进行充电。在本实施方式中,电路部1231包括整流元件D1和D2,整流元件D1与电容器C1并联连接,另外,整流元件D2与上述串联连接的电感器L和电容器C1并联连接。整流元件D2构成为其击穿电压(Breakdown voltage)低于整流元件D1的击穿电压,在本实施方式中,使用齐纳二极管作为整流元件D2。
另外,以对电感器L及电容器C1间的节点赋予初始电位等为目的,电路部1231也可以还包含电阻值比较大的电阻元件(上拉电阻元件或下拉用电阻元件)。另外,电感器L的电感以及电容器C1的电容只要基于动力源121的最大输出值、电池30的电池容量等各要素的设计值来决定即可。
作为用于实现与控制部31的电连接的外部电极,充电线圈单元123还包括高电压侧的连接用端子T123H及低电压侧的连接用端子T123L。作为用于实现与充电线圈单元123的电连接的外部电极,控制部31还包括高电压侧的连接用端子T31H以及低电压侧的连接用端子T31L。连接用端子T123H及连接用端子T31H之间通过配线部901连接,另外,连接用端子T123L及连接用端子T31L间通过配线部902连接,由此,充电线圈单元123与控制部31电连接。
控制部31还包括开关部315和整流元件D3。开关部315例如是包含高耐压晶体管的电子部件,能够切换对电池30进行充电时的充电动作的开始和结束。例如,若使开关部315成为导通状态,则执行电池30的充电,若使开关部315成为非导通状态,则电池30的充电停止。整流元件D3是用于在执行电池30的充电时防止电流从电池30向充电线圈单元123逆流的电子部件,能够保护充电线圈单元123。开关部315以及整流元件D3能够与运算部310一起安装于规定的安装基板。
如图3所示,开关部315和整流元件D3串联连接在连接用端子T31H与电池30的正极(+)之间。在本实施方式中,开关部315配置于电池30的正极侧,整流元件D3配置于连接用端子T31H侧。在本实施方式中,运算部310配置为能够基于来自充电线圈单元123的输出电压(连接用端子T31H的电压值乃至信号电平)来切换开关部315的导通状态以及非导通状态。另外,电池30的负极(-)与连接用端子T31L连接。
图4A是用于说明充电线圈单元123的动作方式的图。如上所述,在飞轮122上支承有磁铁,伴随着动力源121的动力(飞轮122的旋转)而由该磁铁产生磁通变化。在本实施方式中,通过飞轮122的旋转,磁场(的强度)呈正弦波状变化,磁场的变化的1个周期对应于飞轮122的1次旋转。
充电线圈单元123配置在能够检测上述磁通变化的位置,通过该磁通变化,在电感器L1中在图中“a”或者“b”所示的方向上产生感应电压。详细情况将在后面叙述,例如,在产生了上述a方向的感应电压的情况下,由该感应电压产生的电流(感应电流)通过整流元件D2被引导至电容器C1,对电容器C1进行充电。
在图4A的下方部一并示出充电线圈单元123的输出电压V1(开路电压)的波形。在本实施方式中,电容器C1的充电电压(在此为约8[V])成为使输出电压V1偏置的形式,输出电压V1在以约8[V]为基准点的同时,与上述感应电压的产生相应地表示脉冲状的波形。图4B1与图4A同样地表示产生了上述a方向的感应电压的情况下的方式。图4B2与图4A同样地表示产生了上述b方向的感应电压的情况下的方式。图4B3与图4A同样地表示上述a方向的感应电压再次(第二次)产生的情况下的方式(为了与第一次产生的上述a方向的感应电压区别,图示为“a’”。)。
如图4B1所示,在产生了上述a方向的感应电压时,产生向电容器C1的充电电流,电容器C1被充电。在图中,该充电电流用虚线箭头表示。另外,在图中,电感器L1的感应电压的产生方向(极性)由“+”以及“-”表示。在从飞轮122的旋转开始起经过了充分的时间的情况下,在本实施方式中,与上述a方向的感应电压的产生相伴的电容器C1的充电电压约为8[V]。在图中,与电感器L1的感应电压同样地,电容器C1的充电电压的产生方向(极性)由“+”以及“-”表示。
之后,如图4B2所示,当在上述b方向上产生感应电压时,电感器L1的感应电压的产生方向以及电容器C1的充电电压的产生方向如图中由“+”以及“-”所示那样彼此相同。输出电压V1成为“电感器L1的感应电压”与“电容器C1的充电电压”之和,由此,输出电压V1上升至约22[V]。
进而,之后,如图4B3所示,产生上述a’方向的感应电压。上述a’方向的感应电压约为3[V],比之前产生的感应电压(约8[V])低。因此,正向的电流实质上未流过二极管D2,即,实质上不产生向电容器C1的充电电流。在产生了上述a’方向的感应电压的情况下,输出电压V1与产生上述b方向的感应电压的情况同样地,成为“电感器L1的感应电压”与“电容器C1的充电电压”之和,输出电压V1下降至约5[V]后恢复至约8[V]。
如上所述,整流元件D2使用齐纳二极管,充电线圈单元123能够构成为输出电压V1不会超过整流元件D2的击穿电压。整流元件D2的击穿电压可以为150[V]左右,也可以为100[V]左右或50[V]左右。由此,不会对充电线圈单元123的输出对象施加过电压,在本实施方式中,能够保护电池30及控制部31。
通过这样的电路结构,充电线圈单元123将基于动力源121的动力的信号作为输出电压V1向控制部31输出。在控制部31中,运算部310基于输出电压V1来控制开关部315。例如,在开关部315为导通状态的情况下,控制部31能够使用输出电压V1对电池30进行充电。此时,在本电路结构中,输出电压V1被电容器C1的充电电压(约8[V])偏置,因此也有利于电池30的充电的高速化。另外,控制部31也能够附带地进行动力源121的转速的检测、以及使用了该检测结果的其他控制。
图5是作为比较例而用于说明充电线圈单元123R的动作方式的图。在比较例中,充电线圈单元123R包括相互并联连接的电感器L1及电容器C1、以及与它们串联连接的整流元件D1。
在比较例的电路结构中,在电容器C1中流动的电流在图中“a”所示的方向产生感应电压的情况和在图中“b”所示的方向产生感应电压的情况下为反方向。即,在比较例的电路结构的情况下,交替重复电容器C1的充电和放电。因此,电容器C1的电压保持约0[V]。另外,在比较例的电路结构中,双向允许电流流动的闭环路径由电感器L1以及电容器C1形成,因此能够产生所谓的LC振荡。因此,充电线圈单元123R的输出电压V2如部分K所示,相对于磁场的变化的1周期(飞轮122的1次的旋转),表示以约0[V]为基准点的多个脉冲波形。
因此,根据比较例,控制部31难以基于输出电压V2来控制开关部315、以及有效地进行电池30的充电。另外,基于同样的理由,控制部31也难以进行动力源121的转速的检测以及使用该检测结果的其他控制。而且,由于在充电线圈单元123R上也没有设置能够作为齐纳二极管等保护元件发挥作用的整流元件D2,因此成为过电压的输出电压V2也可能被施加给电池30、控制部31等输出对象。
与此相对,根据本实施方式(图4A等),在由电感器L1及电容器C1形成的闭环路径中,通过整流元件D1及D2,允许一个方向的电流且限制另一方向的电流,因此能够适当地限制乃至抑制LC振荡。因此,根据本实施方式,充电线圈单元123的输出电压V1被稳定化,表示以约8[V]为基准点的大致单一的脉冲波形。因此,根据本实施方式,控制部31能够基于输出电压V2适当地控制开关部315,另外,还能够有效地进行电池30的充电。另外,根据本实施方式,整流元件D2被设置为其击穿电压比较低,输出电压V1也不会成为过电压,因此也不会对电池30、控制部31等输出对象施加意外的过电压。
另外,在本实施方式中,电容器C1的充电时的电流的方向被确定为一个方向,并且电容器C1的放电时的电流的方向也被确定为一个方向。在其他观点中,也可以说电容器C1的两个端子中的进行充电以及放电的一个端子被固定地确定。因此,根据本实施方式,电容器C1能够使用电解电容器等极性电容器、即具有正极以及负极的两个端子的电子部件。因此,与使用陶瓷电容器等无极性电容器、即没有正极和负极的区别的电子部件的情况相比,有时能够使充电线圈单元123低成本化。
另外,在本实施方式中,设为电感器L1配置于低电压侧且电容器C1配置于高电压侧的电路结构。因此,电容器C1的充电电压成为偏置输出电压V1的形式,在此,成为输出电压V1偏移约8[V]的形式(参照图4A等)。因此,在使用该输出电压V1对电池进行充电的情况下,能够使该充电高速化。
能够使输出电压V1稳定化的电路结构不限于上述的例子,能够在不脱离本发明的主旨的范围内进行变更。例如,在图4A所例示的电路结构中,电路部1231设为无论在电感器L1中产生的感应电流的方向如何都能够利用该感应电流对电容器C1进行充电。然而,电路部1231的结构也可以部分地变更为,在电感器L1中产生了一个方向的感应电流的情况下能够对电容器C1进行充电且在电感器L1中产生了另一个方向的感应电流的情况下限制电容器C1的放电。
图6表示作为其他实施方式的充电线圈单元123’的电路结构例。充电线圈单元123’代替电路部1231而包含电路部1231’。电路部1231’包含相对于相互串联连接的电感器L1以及电容器C1并联连接的整流元件D2,即,成为从图4A的电路结构中省略了整流元件D1的形式。根据这样的电路结构,在由电感器L1以及电容器C1形成的闭环路径中允许一个方向的电流且限制另一方向的电流。因此,通过图6所例示的充电线圈单元123’,也能够限制乃至抑制电容器C1的充电以及放电的重复以及LC振荡,由此,充电线圈单元123’的输出电压V1’能够稳定化。
根据以上的实施方式,充电线圈单元123或123’包含相互串联连接的电感器L1及电容器C1、以及电路部1231或1231’。电路部1231或1231’被设置为能够利用由电感器L1产生的感应电流对电容器C1进行充电。根据这样的电路结构,能够将基于动力源121的动力的信号作为输出电压V1稳定地输出。动力源121的动力能够基于该输出电压V1进行检测,在本实施方式中,飞轮122的1次的旋转与输出电压V1的1个脉冲对应,因此能够适当地检测动力源121的转速。
以下总结实施方式:
第一方式涉及充电线圈单元(例如123),所述充电线圈单元包括:电感器(例如L1),其基于动力源(例如121)的动力来产生感应电流;电容器(例如C1),其与所述电感器串联连接;以及电路部(例如1231),其被设为能够通过在所述电感器中产生的感应电流对所述电容器进行充电。
根据第一方式,充电线圈单元能够将基于动力源的动力的信号作为输出电压而稳定地输出。
在第二方式中,所述电路部被设为限制由所述电感器以及所述电容器形成的闭环路径中的LC振荡。
根据第二方式,由于不反复进行电容器的充电和放电,因此稳定地输出上述输出电压。
在第三方式中,所述电路部包括:第一整流元件(例如D1),其与所述电容器并联连接;以及第二整流元件(例如D2),其与所述电感器及所述电容器并联连接。
根据第三方式,能够以比较简单的结构实现上述第二方式。
在第四方式中,所述第二整流元件的击穿电压比所述第一整流元件的击穿电压低。
根据第四方式,能够防止电容器被过度充电而使上述输出电压变得过大,从而能够保护充电线圈单元的输出对象。
在第五方式中,所述第二整流元件是齐纳二极管(例如D2)。
根据第五方式,能够以比较简单的结构实现上述第四方式。
在第六方式中,还包括高电压侧的连接用端子(例如T123H)和低电压侧的连接用端子(例如T123L),在所述电感器以及所述电容器之中,所述电感器配置于所述低电压侧,所述电容器配置于所述高电压侧。
根据第六方式,电容器的充电电压成为偏置上述输出电压的形式。因此,例如在将上述输出电压用于电池的充电的情况下,能够使该充电高速化。
在第七方式中,所述电容器是具有正极和负极这两个端子的电子部件(例如C1)。
根据第七方式,由于电容器不反复进行充电和放电,因此能够使用有极性电容器,有利于充电线圈单元的低成本化。
第八方式涉及动力单元(例如12),所述动力单元包括:所述充电线圈单元(例如123);所述动力源(例如121);以及飞轮(例如122),其支承磁铁且配置为能够根据所述动力源的所述动力进行旋转。
根据第八方式,上述充电线圈单元能够应用于以内燃机(发动机)等为动力源的通常的动力单元。
第九方式涉及作业机(例如M),所述作业机具备所述动力单元(例如12)和使用所述动力源的所述动力进行规定的作业的作业机构(例如11)。
根据第九方式,上述动力单元能够应用于通常的作业机。
本发明并不限定于上述实施方式,能够在不脱离本发明的主旨及范围的情况下进行各种变更及变形。因此,为了公开本发明的范围,附加以下的权利要求。
权利要求书(按照条约第19条的修改)
1.一种充电线圈单元,其特征在于,
所述充电线圈单元包括:
电感器,其基于动力源的动力来产生感应电流;
电容器,其与所述电感器串联连接;以及
电路部,其被设为能够通过在所述电感器中产生的感应电流对所述电容器进行充电。
2.根据权利要求1所述的充电线圈单元,其特征在于,
所述电路部被设为限制由所述电感器及所述电容器形成的闭环路径中的LC振荡。
3.根据权利要求2所述的充电线圈单元,其特征在于,
所述电路部包括:
第一整流元件,其与所述电容器并联连接;以及
第二整流元件,其与所述电感器及所述电容器并联连接。
4.根据权利要求3所述的充电线圈单元,其特征在于,
所述第二整流元件的击穿电压比所述第一整流元件的击穿电压低。
5.(修改后)根据权利要求3或4所述的充电线圈单元,其特征在于,
所述第二整流元件是齐纳二极管,并构成为其击穿电压比所述充电线圈单元的输出对象的耐电压低。
6.根据权利要求2至5中任一项所述的充电线圈单元,其特征在于,
所述充电线圈单元还包括高电压侧的连接用端子和低电压侧的连接用端子,
在所述电感器以及所述电容器之中,所述电感器配置于所述低电压侧,所述电容器配置于所述高电压侧。
7.根据权利要求2至6中任一项所述的充电线圈单元,其特征在于,
所述电容器是具有正极和负极这两个端子的电子部件。
8.一种动力单元,其特征在于,
所述动力单元包括:
权利要求1至7中任一项所述的充电线圈单元;
所述动力源;以及
飞轮,其支承磁铁且配置为能够根据所述动力源的所述动力进行旋转。
9.一种作业机,其特征在于,
所述作业机具备:
权利要求8所述的动力单元;以及
作业机构,其使用所述动力源的所述动力进行规定的作业。
- 充电线圈单元、动力单元及作业机
- 作业机械、动力单元及作业机械的柴油发动机