视频跟踪中的自动错误修复方法
文献发布时间:2023-06-19 10:54:12
技术领域
本申请涉及图像处理技术领域,特别是涉及一种视频跟踪中的自动错误修复方法。
背景技术
目标跟踪是计算机视觉的重要组成部分,是一种跟踪目标位置的技术。为了实现目标跟踪提出了很多算法,例如基于朴素贝叶斯算法和卡尔曼滤波器的方法。而核化相关滤波器(KCF)是一种最新的跟踪方法,不仅速度快,而且精度高。为了能够提高核化相关滤波器的工作可靠性,衍生出了各种提高其置信度的方法,比如说,Feng等人引入均值漂移算法来提高KCF跟踪的置信度,而Wang等人则是利用卡尔曼滤波使KCF跟踪器对快速运动的跟踪更加精确,除此之外,基于深度学习的视觉示踪基于卷积神经网络(CNN)的视觉跟踪器,在视觉跟踪方面表现出了优异的性能,通过训练可以减少遮挡和模糊对跟踪的影响。
但是在跟踪领域中仍有许多问题需要解决,特别是遮挡和模糊是跟踪领域中存在已久的问题。当遮挡或模糊发生时,KCF跟踪器很难再次跟踪目标对象。由于跟踪器对目标物体的颜色和形状随时间的变化进行在线训练,一旦跟踪器偏离目标物体,就会得到错误的数据训练。基于深度的学习的方法需要经过训练,训练数据影响实际效果,且大多效率较低。
发明内容
本申请的目的在于克服上述问题或者至少部分地解决或缓减解决上述问题。
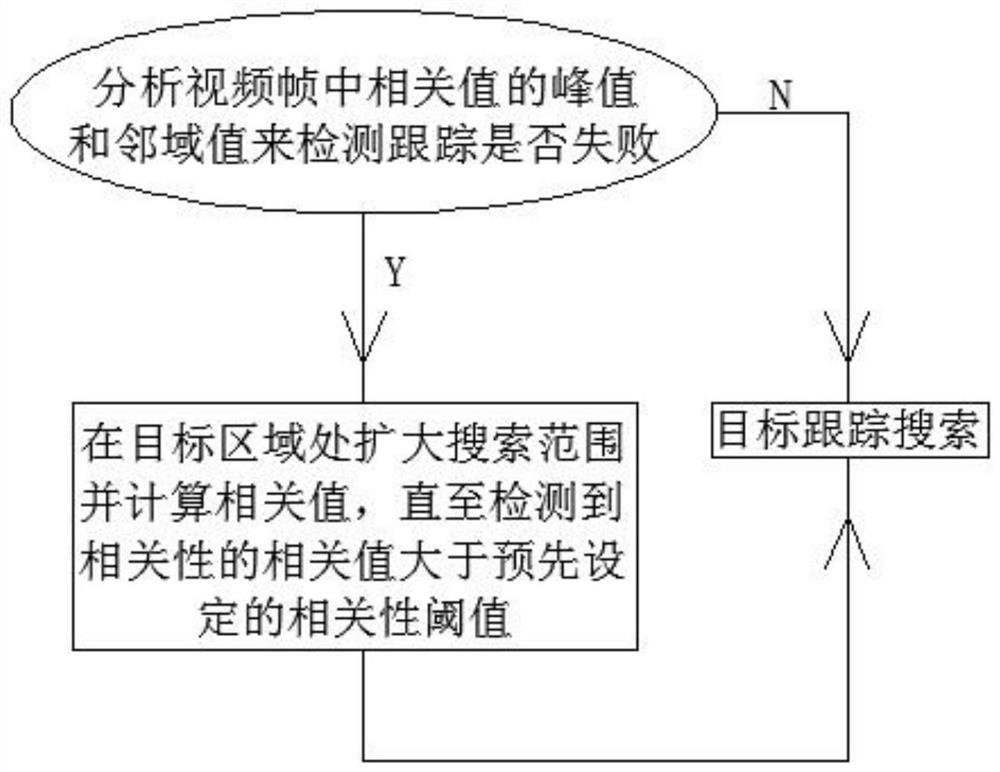
根据本申请的一个方面,提供了一种视频跟踪中的自动错误修复方法,首先分析视频帧中相关值的峰值和邻域值来检测跟踪是否失败,如检测到跟踪失败则在目标区域处扩大搜索范围并计算相关值,最后当检测到相关性的相关值大于预先设定的相关性阈值后即重新寻找到追踪目标。
可选地,分析视频帧中相关值的峰值和邻域值来检测跟踪是否失败得过程是基于KCF的跟踪器用来预测并生成下一帧的目标位置,所述跟踪器采用垂直和水平移位的稠密数据。
可选地,所述跟踪器配置有搜索窗口,利用搜索窗口内数据生成的循环矩阵计算视频中每一帧相关性,根据计算出的相关性峰值与相关性邻域值间的数值关系来确定目标对象并实现跟踪。
可选地,当所述相关性峰值与所述相关性邻域值间数值相类似,则表明检测跟踪失败,此时停止目标模型的更新并在前一帧的目标区域处扩大搜索范围并计算相关值。
可选地,在目标区域处扩大搜索范围并计算相关值时,是从目标模型周围的区域计算相关性,以目标区域的坐标为中心同时生成至少九个拥有相同宽度和高度的搜索框来扩大后续的搜索范围,并且分别计算每个搜索窗口的相关值,直至获得高于预先指定的所述相关性阈值的相关值,认为是重新找到追踪目标,回到正常的搜索范围。
可选地,当出现目标跟踪失败时,对视频中出现失败后的每一帧的相关值进行搜索范围扩大下的相关值计算,当在某一帧中重新找到追踪目标时,则跳转到该视频帧处开启正常的搜索。
特别地,本发明还提供了一种计算设备,包括存储器、处理器和存储在所述存储器内并能由所述处理器运行的计算机程序,其中,所述处理器执行所述计算机程序时实现如上所述的方法。
本发明还提供了一种计算机可读存储介质,优选为非易失性可读存储介质,其内存储有计算机程序,所述计算机程序在由处理器执行时实现如上所述的方法。
本发明还提供了一种计算机程序产品,包括计算机可读代码,当所述计算机可读代码由计算机设备执行时,导致所述计算机设备执行如上所述的方法。
本申请的视频跟踪中的自动错误修复方法,是基于KCF跟踪器,使用搜索窗口内的特征计算出的相关值进行跟踪,通过分析相关值的峰值和邻域值来检测跟踪目标的结果,当确定跟踪失败则通过在目标对象失踪的目标区域周围生成多个搜索框来扩大搜索范围,从而实现扩大化的搜索跟踪目标对象,可以在遮挡或模糊发生时有效地再次跟踪目标,提高视频跟踪的准确性和工作可靠性。
根据下文结合附图对本申请的具体实施例的详细描述,本领域技术人员将会更加明了本申请的上述以及其他目的、优点和特征。
附图说明
后文将参照附图以示例性而非限制性的方式详细描述本申请的一些具体实施例。附图中相同的附图标记标示了相同或类似的部件或部分。本领域技术人员应该理解,这些附图未必是按比例绘制的。附图中:
图1是根据本申请一个实施例的视频跟踪中的自动错误修复方法的方法流程图;
图2是根据本申请另一个实施例的计算设备结构图;
图3是根据本申请另一个实施例的计算机可读存储介质结构图。
具体实施方式
本实施例描述了一种视频跟踪中的自动错误修复方法,如图1所示,其在工作时主要包括以下工作步骤,首先分析视频帧中相关值的峰值和邻域值来检测跟踪是否失败,如检测到跟踪失败则在目标区域处扩大搜索范围并计算相关值,最后当检测到相关性的相关值大于预先设定的相关性阈值后即重新寻找到追踪目标。
可以理解的是,本实施例的自动错误修复方法来检测跟踪失败和处理遮挡或模糊的情况,也就是说本实施例首先分析相关值的峰值和邻域值来检测跟踪是否失败,然后在必要时在目标对象所在位置周围的大范围区域的多个搜索窗口中计算其相关性来监测目标对象。
在本实施例中,分析视频帧中相关值的峰值和邻域值来检测跟踪是否失败得过程是基于KCF的跟踪器用来预测并生成下一帧的目标位置,所述跟踪器采用垂直和水平移位的稠密数据。所述跟踪器配置有搜索窗口,利用搜索窗口内数据生成的循环矩阵计算视频中每一帧相关性,根据计算出的相关性峰值与相关性邻域值间的数值关系来确定目标对象并实现跟踪。而当所述相关性峰值与所述相关性邻域值间数值相类似,则表明检测跟踪失败,此时停止目标模型的更新并在前一帧的目标区域处扩大搜索范围并计算相关值。
另外,在目标区域处扩大搜索范围并计算相关值时,是从目标模型周围的区域计算相关性,以目标区域的坐标为中心同时生成至少九个拥有相同宽度和高度的搜索框来扩大后续的搜索范围,并且分别计算每个搜索窗口的相关值,直至获得高于预先指定的所述相关性阈值的相关值,认为是重新找到追踪目标,回到正常的搜索范围。当出现目标跟踪失败时,对视频中出现失败后的每一帧的相关值进行搜索范围扩大下的相关值计算,当在某一帧中重新找到追踪目标时,则跳转到该视频帧处开启正常的搜索。
可以理解的是,本实施例使用基于KCF的跟踪器用来预测并生成下一帧的目标位置,跟踪器采用垂直和水平移位的稠密数据,基于KCF的跟踪器利用搜索窗口内数据生成的循环矩阵计算相关性,跟踪目标对象。本实施例中通过一组相关性公式,可以分别得到在视频图像的每一帧中相关性峰值的数值和相关性邻域值的数值。在跟踪过程中,相关性峰值的位置是目标的位置,而相关值在峰值附近区域逐渐减小,因此,当跟踪成功时,峰值可以与邻域值存在明显区分。
而当峰值与邻域值的平均值分离时,跟踪器可以准确地估计目标的位置。当跟踪器由于遮挡而丢失目标对象时,相关峰值的数值会下降到与其邻域值相似的水平,即找不到强相关性的目标,此时可能跟踪失败,这种情况很可能是由于遮挡或模糊的发生引起的。如果相关值继续接近或者低于邻域相关值,跟踪器最终会丢失目标。
本实施例的方法在检测到跟踪失败时,停止目标模型更新,避免非目标信息对模型产生影响。然后,从目标模型周围的区域计算其相关性,以目标区域的坐标为中心同时生成九个拥有相同宽度和高度的搜索框来扩大后续的搜索范围,分别计算每个搜索窗口的相关值。然后,对出现失败后的每一帧的相关值进行检查,重复这个过程,直到获得高于预先指定的相关性的相关值,认为是重新找到追踪目标,回到正常的搜索范围。如再次出现遮挡或模糊现象,重复该步骤。
根据下文结合附图对本申请的具体实施例的详细描述,本领域技术人员将会更加明了本申请的上述以及其他目的、优点和特征。
本申请实施例还提供了一种计算设备,参照图2,该计算设备包括存储器1120、处理器1110和存储在所述存储器1120内并能由所述处理器1110运行的计算机程序,该计算机程序存储于存储器1120中的用于程序代码的空间1130,该计算机程序在由处理器1110执行时实现用于执行任一项根据本发明的方法步骤1131。
本申请实施例还提供了一种计算机可读存储介质。参照图3,该计算机可读存储介质包括用于程序代码的存储单元,该存储单元设置有用于执行根据本发明的方法步骤的程序1131′,该程序被处理器执行。
本申请实施例还提供了一种包含指令的计算机程序产品。当该计算机程序产品在计算机上运行时,使得计算机执行根据本发明的方法步骤。
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。所述计算机程序产品包括一个或多个计算机指令。在计算机加载和执行所述计算机程序指令时,全部或部分地产生按照本申请实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、获取其他可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一个计算机可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线(例如同轴电缆、光纤、数字用户线(DSL))或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、服务器或数据中心进行传输。所述计算机可读存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。所述可用介质可以是磁性介质,(例如,软盘、硬盘、磁带)、光介质(例如,DVD)、或者半导体介质(例如固态硬盘Solid State Disk(SSD))等。
专业人员应该还可以进一步意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本申请的范围。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分步骤是可以通过程序来指令处理器完成,所述的程序可以存储于计算机可读存储介质中,所述存储介质是非短暂性(英文:non-transitory)介质,例如随机存取存储器,只读存储器,快闪存储器,硬盘,固态硬盘,磁带(英文:magnetic tape),软盘(英文:floppy disk),光盘(英文:optical disc)及其任意组合。
以上所述,仅为本申请较佳的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应该以权利要求的保护范围为准。
- 视频跟踪中的自动错误修复方法
- 一种多块结构网格生成中物面投影错误的修复方法