电容器辅助的电池模块和系统
文献发布时间:2023-06-19 11:02:01
技术领域
在该部分中提供的信息是用于大体呈现本公开的背景的目的。当前指定的发明人的工作,就其在该部分中描述的范围,以及本说明书的在提交的时刻本来不可以有资格作为现有技术的方面,既没有明确地也没有隐含地承认为本公开的现有技术。
本公开涉及车辆,且更具体地涉及车辆的电池系统。
背景技术
传统车辆包括生成推进扭矩的内燃发动机。混合动力车辆能够包括用于推进的内燃发动机和一个或多个电动马达两者。所述一个或多个电动马达用于改善燃料效率。电动马达和内燃发动机能够组合使用,以实现相比仅使用内燃发动机来说更大的扭矩输出。
混合动力车辆的示例性类型是并联式混合动力车辆和串联式混合动力车辆或并联和串联的混合模式。在并联式混合动力车辆中,电动马达能够与发动机并联工作,以组合发动机的功率和续驾里程优点与电动马达的再生制动优点。在串联式混合动力车辆中,发动机驱动发电机产生用于电动马达的电力,电动马达驱动传动装置。这允许电动马达承担发动机的一些功率责任,这继而允许使用更小的、更燃料高效的发动机。
发明内容
该部分提供本公开的一般总结,且不是本公开的完整范围或者其全部特征的全面公开。
电容器辅助的电池模块被提供且包括壳体、正端子、负端子、一个或多个电容器辅助的电池电芯以及一个或多个第一开关。所述一个或多个电容器辅助的电池电芯设置在壳体中,且包括一个或多个电池端子和一个或多个电容器端子。所述一个或多个电池端子连接到电池电极。所述一个或多个电容器端子连接到电容器电极。所述一个或多个电池端子和所述电容器端子中的至少一者连接到负端子。一个或多个第一开关配置成将所述一个或多个电容器端子连接到正端子。在正端子和负端子两端测量电容器辅助的电池模块的总电压。
在其他特征中,所述一个或多个电容器辅助的电池电芯包括:锂离子电池阴极端子;锂离子电容器阴极端子;锂离子电池阳极端子;和锂离子电容器阳极端子。所述一个或多个电池端子包括锂离子电池阴极端子和锂离子电池阳极端子。所述一个或多个电容器端子包括锂离子电容器阴极端子和锂离子电容器阳极端子。所述一个或多个第一开关包括第一开关和第二开关。第一开关配置成将锂离子电池阴极端子连接到正端子。第二开关配置成将锂离子电容器阴极端子连接到正端子。
在其他特征中,所述一个或多个电容器辅助的电池电芯包括串联连接的电容器辅助的电池电芯。
在其他特征中,所述一个或多个电容器辅助的电池电芯包括:第二锂离子电池阴极端子;第二锂离子电容器阴极端子;第二锂离子电池阳极端子;以及第二锂离子电容器阳极端子。所述一个或多个电池端子包括第二锂离子电池阴极端子以及第二锂离子电池阳极端子。所述一个或多个电容器端子包括第二锂离子电容器阴极端子和锂离子电容器阳极端子。所述一个或多个第一开关包括第三开关和第四开关。第三开关配置成将第二锂离子电池阴极端子连接到正端子。第四开关配置成将第二锂离子电容器阴极端子连接到正端子。
在其他特征中,所述一个或多个电容器辅助的电池电芯包括:锂离子电池阴极端子;锂离子电容器阴极端子;所述一个或多个电池端子包括锂离子电池阴极端子;所述一个或多个电容器端子包括锂离子电容器阴极端子;所述一个或多个第一开关包括第一开关;并且第一开关配置成将锂离子电容器阴极端子连接到正端子。
在其他特征中,所述一个或多个电容器辅助的电池电芯包括:第二锂离子电池阴极端子;第二锂离子电容器阴极端子;所述一个或多个电池端子包括第二锂离子电池阴极端子;所述一个或多个电容器端子包括第二锂离子电容器阴极端子;所述一个或多个第一开关包括第二开关;并且第二开关配置成将第二锂离子电容器阴极端子连接到正端子。
在其他特征中,所述一个或多个电容器辅助的电池电芯中的每者包括该电容器辅助的电池电芯的电池阳极电极和电容器阳极电极所共享的阳极端子。
在其他特征中,所述一个或多个电容器辅助的电池电芯中的每者包括仅单个阳极端子。
在其他特征中,所述一个或多个一个或多个电容器辅助的电池电芯中包括液体有机电解质。
在其他特征中,所述一个或多个电容器辅助的电池电芯包括固态电池电芯。固态电池电芯包括固态电解质。
在其他特征中,所述一个或多个一个或多个电容器辅助的电池电芯包括混合型电芯。混合型电芯包括半-液体电解质。
在其他特征中,电容器辅助的电池模块还包括一个或多个非电容器辅助的电池电芯。
在其他特征中,电容器辅助的电池模块还包括电容器辅助的电池端子。所述一个或多个电池端子以及所述一个或多个电容腔端子是阴极端子。所述一个或多个电池端子和所述电容器辅助的电池端子在壳体的第一侧上。所述一个或多个电容器端子在壳体的与第一侧相对的第二侧上。
在其他特征中,所述一个或多个电容器辅助的电池电芯包括连接到电容器辅助的电池端子的电极。连接到电容器辅助的电池端子的电极包括金属氧化物和石墨烯。
在其他特征中,电容器辅助的电池模块还包括电容器辅助的电池端子。所述一个或多个电池端子以及所述一个或多个电容器端子是阴极端子。所述一个或多个电池端子以及所述一个或多个电容器端子在壳体的第一侧上。电容器辅助的电池端子在壳体的第二侧上。
在其他特征中,所述一个或多个电容器辅助的电池电芯包括连接到电容器辅助的电池端子的电极。连接到电容器辅助的电池端子的电极包括金属氧化物和石墨烯。
在其他特征中,模块化的动态分配容量存储系统包括:包括电容器辅助的电池模块的一个或多个电池模块;将处于第一电压电势的功率供应至第一负载的一个或多个源端子;以及一个或多个第二开关。所述一个或多个电池模块配置成基于所述一个或多个第二开关的一个或多个状态将功率供应至所述一个或多个源端子。
在其他特征中,模块化的动态分配容量存储系统还包括一个或多个电池模块、第一源端子和第二源端子。所述一个或多个电池模块包括第一系列电池模块和第二系列电池模块。第一系列电池模块包括电容器辅助的电池模块。第一源端子将处于第一电压电势的功率供应至第一负载。第二源端子将处于第二电压电势的功率供应至第二负载。所述一个或多个第二开关包括第一开关和第二开关。第一系列电池模块配置成基于第一开关的状态将功率供应至第一源端子。第二系列电池模块配置成基于第二开关的状态将功率供应至第二源端子。
在其他特征中,模块化的动态分配容量存储系统还包括:感测模块,感测模块配置成确定电容器辅助的电池模块的参数并生成状态信号;以及控制模块,控制模块配置成接收功率请求信号,并基于功率请求信号、参数和操作模式,调节所述一个或多个第二开关中的至少一者的状态。
在其他特征中,所述一个或多个电池模块包括电容器辅助的电池模块和非电容器辅助的电池模块。
从在本文中提供的描述,更多适用领域将变得显而易见。在该发明内容中的描述和具体示例旨在仅用于说明目的,且并不旨在限制本公开的范围。
附图说明
本文中所描述的附图仅出于所选择的实施例且并非所有可能实施方式的说明目的,且并不旨在限制本公开的范围。
图1是示出锂离子电池(LIB)电芯和电容器辅助的电池(CAB)电芯在55℃下经过3060个循环之后在-30℃下随时间的起动照明点火(SLI)冷启动电压降低的示例曲线图。
图2是示出LIB电芯和CAB电芯在55℃下经过3060个循环之后的容量保持率的曲线图。
图3是示出LIB电芯和CAB电芯在55℃下经过3060个循环之后的容积膨胀比的曲线图。
图4是在45℃下的CAB电芯的膨胀比对存储电压的曲线图。
图5是示例性车辆控制系统的功能框图,其包括模块化的动态分配容量存储系统(MODACS)。
图6是示例性MODACS的功能框图。
图7A至图7B是包括MODACS的示例性实施方式的示意图。
图8是车辆控制系统的另一示例的功能框图。
图9是包括MODACS的车辆的功能框图。
图10是与12V起动器和起动器发电机单元一起使用的示例性MODACS的功能框图。
图11是与48V起动器和起动器发电机单元一起使用的示例性MODACS的功能框图。
图12是包括LIB开关和锂离子电容器(LIC)开关的CAB模块的示例的功能框图。
图13是包括LIB开关和LIC开关的CAB模块的示例的功能框图。
图14是包括LIC开关的CAB模块的示例的功能框图。
图15是包括CAB电芯的CAB模块的示例的功能框图,CAB电芯具有LIB开关和LIC开关且实施为固态电池CAB电芯。
图16是包括单个CAB电芯的CAB模块的示例的功能框图,该单个CAB电芯具有LIB开关、LIC开关和单个CAB阳极且实施为固态电池CAB电芯。
图17是包括实施为固态电池CAB电芯的双CAB电芯的CAB模块的示例的功能框图。
图18是示出对应类型的电极的CAB电芯的功能框图。
图19是在与LIB阴极端子相同的一侧上包括单个CAB阳极端子的CAB电芯的功能框图。
图20是在与LIB和锂离子电容器(LIC)阴极端子不同的一侧上包括单个CAB阳极端子的CAB电芯的功能框图。
图21是在与LIB阳极端子相同的一侧上包括单个CAB阴极端子的CAB电芯的功能框图。
图22是在与LIB和LIC阳极端子不同的一侧上包括单个CAB阴极端子的CAB电芯的功能框图。
图23是用于电池包的示例性电池监测(或管理)系统(BMS)模块的功能框图。
图24是示例性MODACS电路的示意图。
图25是CAB电芯的示例的电极架构的示意框图。
贯穿附图的若干视图,对应附图标记指示对应部分。
具体实施方式
为了最小化铅在车辆中的使用,铅酸电池可以被其他类型的电池替代,其他类型的电池是诸如锂离子电池和/或电容器辅助的电池(CAB)。电容器辅助的电池可以包括锂离子电池(LIB)电极和锂离子电容(LIC)电极。在图25中示出了CAB电芯(cell)的示例。一些CAB包括由锂镍锰钴氧化物(NMC)形成的LIB阴极、由石墨形成的LIB以及LIC阳极、由活性炭(AC)形成的LIC阴极、隔离层以及带有液体溶剂和锂盐的电解质。当CAB被设置在具有内燃发动机的车辆的发动机罩下方时,CAB能够经历例如45-75℃的温度。在这些温度下,由于在AC电极和电解质溶剂之间的副反应,CAB的电芯的容积可能增加(称为“膨胀”),电芯的充电容量可能减少,且电芯的耐久性可能退化。
图1示出了LIB电芯和CAB电芯在55℃下经过3060个循环之后,在-30℃下随时间变化的SLI冷启动电压降低的示例曲线图。x轴是时间,且y轴是冷启动电压。在每一循环期间,LIB电芯和CAB电芯都从60%的充电状态(SOC)充电至80%的充电状态,且从80%的SOC放电至60%的SOC。CAB电芯包括NMC阴极。图2示出了在55℃下经过3060个循环之后,LIB电芯和CAB电芯的容量保持率(y轴)的曲线图,其示出相比LIB电芯,CAB电芯由于膨胀和退化的功能具有更低的容量保持率(capacity retention)。图3示出了在55℃下经过3060个循环之后,LIB电芯和CAB电芯的容积膨胀比(y-轴)的曲线图,其示出相比LIB电芯,CAB电芯经受更多的膨胀。基于初始电芯容积和在预定数量的循环之后的电芯容积来确定膨胀比。
图4示出了对于在45℃下的CAB模块,膨胀比(y轴)对存储电压(x轴)的曲线图。在该曲线图中的数据是在45℃下存储48小时之后的数据。如从曲线图能够看到的,存储电压越高,膨胀比越高,且膨胀越大。对于大于3.9V的存储电压,膨胀的量显著增加。在高电芯电压(大于3.9V的电压)下,由活性炭形成的LIC阴极能够经历与溶剂的加速的副反应,这导致膨胀、增加的直流电阻以及在LIC中有效电解质的缺乏。
为了解决这些问题,已经测试了各种电池布置结构,其包括具有昂贵的AC材料的基于NMC的CAB电芯。这些电池布置结构具有有限的功能以及带有多种添加物的复杂电解质配方。至少由于这些原因,所述电池布置结构在发动机罩下应用中的使用受到限制。
本文中所阐述的示例包括具有低压架构的CAB模块,其提供高功率输出。还阐述了系统控制技术,其用于基于车辆操作模式单独调节CAB模块的电池电芯和电容电芯的操作电压和输出功率分配。这些示例使得能够在车辆发动机罩下应用中和其他应用中使用CAB电芯,同时允许电池和电容器电极由包括NMC、锂镍锰氧化物(LNMO)、锂锰氧化物(LMO)、锂钛氧化物(LTO)、石墨、活性炭和其他复合物和/或元素的各种不同的化学成分形成。在高温(例如,大于45℃的温度)应用中,CAB模块经历最小膨胀,且具有改善的充电状态和容量保持率以及增强的耐久性。
所公开的示例例如通过在增压模式(boost mode)期间提供电气增压功率以迅速增加发动机的速度来提供改善的燃油经济性。示例还适用于车辆低压停止启动系统和微型电池辅助系统(μBAS),并且由于增加的电芯高温耐久性而有助于降低保修成本。
本文中公开了模块化动态分配的容量存储系统(MODACS)MODACS和对应的操作。MODACS中的每者包括一个或多个CAB模块,并且可以包括一个或多个非CAB模块,其中,CAB模块中的每者包括电容器电极,而非CAB模块中的每者不包括电容器电极。MODACS可以实施为具有对应壳体的单个电池,所述对应壳体具有负(或接地参考)端子和多个源端子。MODACS的源端子中的每者都可以具有预设的直流(DC)电压(例如12伏(V),24V,36V,48V等),并且可以在充电期间供应(或释放)电流或接收电流。作为示例,MODACS可以包括单个48V源端子,第一12V源端子和第二12V源端子。
MODACS中的每者包括一个或多个CAB电芯,并且可以包括一个或多个非CAB电芯以及MODACS控制模块。MODACS控制模块可以附接至MODACS的壳体,在MODACS的壳体中实施或从外部连接到MODACS的壳体。MODACS控制模块可以在壳体或远程位置处部分或全部实施。作为示例,MODACS控制模块可以被实施为车辆内的控制模块和/或被实施为车辆控制模块的部分。
壳体可以包括开关和电池监测(或管理)系统(BMS)模块。开关和BMS模块可以被连接到CAB和非CAB电芯(在下文中称为“电芯”)和/或与CAB和非CAB电芯单独地实施。MODACS控制模块基于来自BMS的信息,控制开关的操作状态,以将电芯中选定的电芯连接到源端子。可以选择任意数量的电芯、CAB模块和非CAB模块,并将其连接到源端子中的每者。可以在任何时刻将相同或不同的电芯、CAB模块和非CAB模块连接到源端子中的每者。如在下文中进一步描述的,电芯、CAB模块和非CAB模块可以被如下连接:串联和/或并联;处于不同的连接配置中;并可以被组织为组块、包和/或组。每个组块可以包括一个或多个电芯,其可以串联和/或并联连接。每个包可以包括一个或多个组块,其可以串联和/或并联连接。每个组可以包括一个或多个包,其可以串联和/或并联连接。组可以串联和/或并联连接。BMS模块中的每者可以被分配给一个或多个电芯、一个或多个组块、一个或多个包和/或一个或多个组,并监测对应参数,诸如电压、温度、电流水平、SOX、瞬时功率和/或电流限值、短期功率和/或电流限值、和/或连续功率和/或电流限值。
首字母缩写词“ SOX”是指充电状态(SOC)、健康状态(SOH)和/或功能状态(SOF)。电芯、CAB模块和/或非CAB模块的SOC可以指存储在电芯、CAB模块和/或非CAB模块中的电压、电流和/或可用功率的量。电芯、CAB模块和/或非CAB模块的SOH可以是指:寿命(或操作小时数);是否有短路;在某些操作条件下,供应给或者源自电芯、CAB模块和/或非CAB模块的温度、电压和/或电流水平;和/或描述电芯、CAB模块和/或非CAB模块健康的其他参数。电芯、CAB模块和/或非CAB模块的SOF可以指供应给或者源自电芯、CAB模块和/或非CAB模块的当前温度,电压和/或电流水平,和/或描述电芯、CAB模块和/或非CAB模块的当前功能状态的其他参数。
瞬时功率和电流限值可以指短时间段(例如,小于2秒)的功率和电流限值。短期功率和电流限值可以指中间时间长度(例如2-3秒)的功率和电流限值。连续功率和电流限值是指较长时间段(例如,大于3秒的期间)内的功率和电流限值。
MODACS控制模块控制开关的状态,以将电芯连接到源端子,同时满足目标和/或请求的电压、电流和功率容量。MODACS控制模块和/或车辆控制模块可以例如基于操作模式来设置目标和/或请求的电压,电流和功率容量。如下文中所描述的,MODACS可以在对应于车辆操作模式的不同操作模式下操作。MODACS操作模式可以包括例如再生模式、增压模式、自动启动模式或其他MODACS充电或放电模式。车辆操作模式可以包括电动车辆启动模式、发动机起动模式、发动机辅助模式、机会充电模式、减速燃料切断(DFCO)再生模式、电动车辆再生模式(例如,发电机DFCO再生模式或制动器再生模式)、电动车辆巡航模式和/或其他车辆操作模式。在下文中描述了额外车辆操作模式。车辆操作模式中的每者对应于MODACS模式中的一者。所述模式在下文中被进一步描述。
本文中所公开的实施方式可以应用于全电动车辆、电池电动车辆(BEV)、包括插电式混合电动车辆(PHEV)的混合电动车辆、部分或完全自动驾驶车辆以及其他类型的车辆。
现在将参考附图更全面地描述示例性实施例。
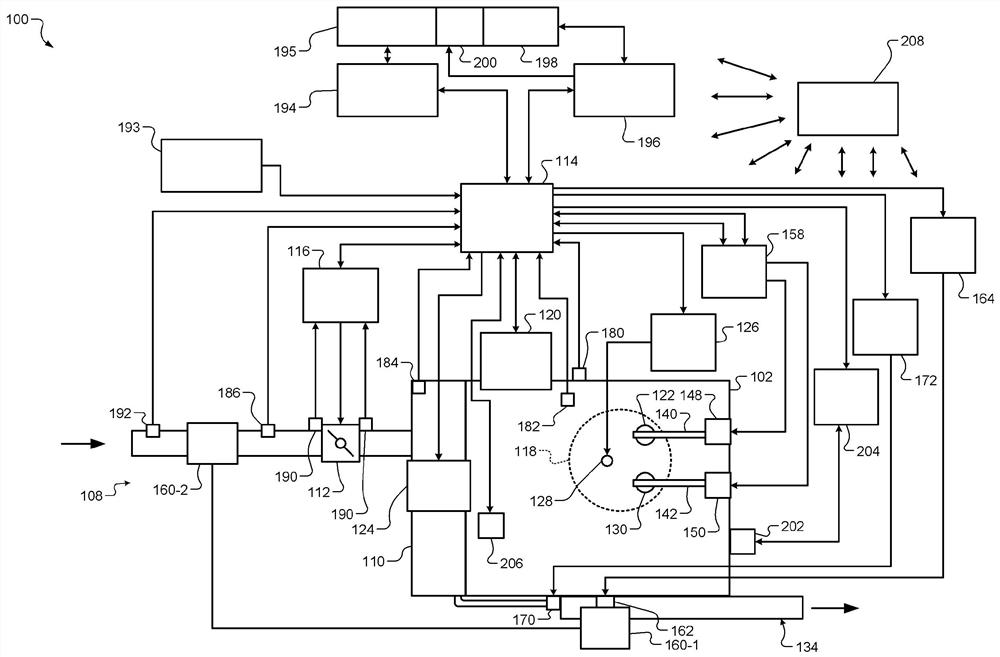
现在参考图5,呈现了示例性动力系统100的功能框图。车辆的动力系统100包括发动机102,其燃烧空气/燃料混合物以产生扭矩。车辆可以是非自动的、部分自动或者全自动的。
空气通过进气系统108被吸入发动机102。进气系统108可以包括进气歧管110和节气门112。仅作为示例,节气门(throttle valve)112可以包括具有可旋转叶片的蝶形阀。发动机(或车辆)控制模块(ECM)114控制节气门致动器模块116,并且节气门致动器模块116调节节气门112的开度以控制流入进气歧管110的气流。
来自进气歧管110的空气被吸入发动机102的气缸中。尽管发动机102可以包括任何数量的气缸,但是出于说明目的,示出了单个代表性气缸118。在一些情况下,ECM 114可以指令气缸致动器模块120选择性地停用一些气缸,这可以改善燃料效率。
发动机102可以通过使用四冲程循环或另一合适的发动机循环来操作。下文将描述的四冲程循环的四个冲程称为进气冲程、压缩冲程、燃烧冲程和排气冲程。在曲轴(未示出)的每一转期间,在气缸118内发生四个冲程中的两个冲程。因此,气缸118要经历所有四个冲程,则需要两个曲轴转数。对于四冲程发动机,一个发动机循环可以对应于两个曲轴转数。
当气缸118被激活时,在进气冲程期间,来自进气歧管110的空气通过进气阀122被吸入气缸118。ECM 114控制燃料致动器模块124,其调节燃料喷射以实现期望的空气/燃料比。可以在中央位置或多个位置处,诸如在每个气缸的进气阀122附近将燃料喷射到进气歧管110中。在各种实施方式中(未示出),可以将燃料直接喷射到气缸中或喷射到与气缸相关联的混合室/端口中。燃料致动器模块124可以停止向停用的气缸喷射燃料。
喷射的燃料与空气混合并在气缸118中形成空气/燃料混合物。在压缩冲程期间,气缸118内的活塞(未示出)压缩空气/燃料混合物。发动机102可以是压燃式发动机,在这种情况下,压缩引起空气/燃料混合物的点火。替代地,发动机102可以是火花点火发动机,在这种情况下,火花致动器模块126基于来自ECM 114的信号使气缸118中的火花塞128通电,从而使空气/燃料混合物点火。发动机102可以是均质充量压燃(HCCI)发动机,其执行压缩点火和火花点火两者。火花的正时(timing)可以相对于活塞处于其最高位置时的时间来指定,所述最高位置将被称为上止点(TDC)。
火花致动器模块126可以由定时信号控制,该定时信号指定在TDC之前或之后多久生成火花。因为活塞位置与曲轴旋转直接相关,所以火花致动器模块126的操作可以与曲轴的位置同步。火花致动器模块126可以禁止向停用气缸供应火花或向停用气缸提供火花。
在燃烧冲程期间,空气/燃料混合物的燃烧将活塞向下驱动,由此驱动曲轴。燃烧冲程可以被定义为在活塞到达TDC与活塞返回最底部位置时的时间(该最底部位置将被称为下止点(BDC))之间的时间。在排气冲程期间,活塞从BDC开始向上移动,并通过排气阀130排出燃烧的副产物。燃烧的副产物经由排气系统134从车辆排出。
进气阀122可以由进气凸轮轴140控制,而排气阀130可以由排气凸轮轴142控制。在各种实施方式中,多个进气凸轮轴(包括进气凸轮轴140)可以控制气缸118的多个进气阀(包括进气阀122)和/或可以控制多排气缸(包括气缸118)的进气阀(包括进气阀122)。类似地,多个排气凸轮轴(包括排气凸轮轴142)可以控制气缸118的多个排气阀和/或可以控制多排气缸(包括气缸118)的排气阀(包括排气阀130)。尽管示出并已经讨论了基于凸轮轴的阀致动,但是可以实施无凸轮的阀致动器。虽然示出了单独的进气凸轮轴和排气凸轮轴,但是可以使用具有用于进气阀和排气阀的凸叶(tobe)的一个凸轮轴。
气缸致动器模块120可以通过禁止进气阀122和/或排气阀130的打开来停用气缸118。进气阀122打开时的时间可以通过进气凸轮相位器148而相对于活塞TDC变化。排气阀130打开时的时间可以通过排气凸轮相位器150而相对于活塞TDC变化。相位器致动器模块158可以基于来自ECM 114的信号来控制进气凸轮相位器148和排气凸轮相位器150。在各种实施方式中,可以省略凸轮相位调整。可变阀门升程(未示出)也可以由相位器致动器模块158控制。在各种其他实施方式中,进气阀122和/或排气阀130可以由除凸轮轴之外的致动器,诸如机电致动器、电动液压致动器、电磁致动器等控制。
发动机102可以包括向进气歧管110提供压缩空气的零个、一个或多于一个的增压装置。例如,图5示出了包括由流动通过排气系统134的排气驱动的涡轮增压器涡轮160-1的涡轮增压器。超级增压器是另一种类型的增压装置。
涡轮增压器还包括涡轮增压器压缩机160-2,该涡轮增压器压缩机160-2由涡轮增压器涡轮160-1驱动,且其压缩引入节气门112的空气。废气门(WG)162控制通过并绕过涡轮增压器涡轮160-1的排气流。废气门也能够称为(涡轮增压器)涡轮旁路阀。废气门162可以允许排气绕过涡轮增压器涡轮160-1,以减少由涡轮增压器提供的进气压缩。ECM 114可以经由废气门致动器模块164控制涡轮增压器。废气门致动器模块164可以通过控制废气门162的开度来调节涡轮增压器的增压。
冷却器(例如,增压空气冷却器或中间冷却器)可以耗散压缩空气充量中所包含的一些热量,这些热量可以随着空气的压缩而生成。尽管出于说明的目的而单独示出,但是涡轮增压器涡轮160-1和涡轮增压器压缩机160-2可以彼此机械地联结,从而将进气紧密地靠近热排气。压缩空气充量可以从排气系统134的部件吸收热量。
发动机102可以包括排气再循环(EGR)阀170,其将排气选择性地重新引导回到进气歧管110。EGR阀170可以在排气系统134中从涡轮增压器涡轮160-1的上游接收排气。EGR阀170可以由EGR致动器模块172控制。
可以使用曲轴位置传感器180来测量曲轴位置。可以基于使用曲轴位置传感器180测量的曲轴位置来确定发动机速度。可以使用发动机冷却剂温度(ECT)传感器182来测量发动机冷却剂的温度。ECT传感器182可以位于发动机102内或冷却剂循环所在的其他位置处,诸如散热器(未示出)处。
进气歧管110内的压力可以使用歧管绝对压力(MAP)传感器184来测量。在各种实施方式中,可以测量发动机真空度,该发动机真空度是环境空气压力与进气歧管110内的压力之间的差。可以使用质量空气流(MAF)传感器186测量流入进气歧管110的空气的质量流动速率。在各种实施方式中,MAF传感器186可以位于还包括节气门112的壳体中。
节气门112的位置可以通过使用一个或多个节气门位置传感器(TPS)190来测量。可以通过使用进气温度(IAT)传感器192来测量被吸入发动机102的空气的温度。也可以实施一个或多个其他传感器193。其他传感器193包括油门踏板位置(APP)传感器、制动踏板位置(BPP)传感器,可以包括离合器踏板位置(CPP)传感器(例如,在手动变速器的情况下),并且可以包括一个或多个其他类型的传感器。APP传感器测量车辆的乘客舱内的油门踏板的位置。BPP传感器测量车辆的乘客舱内的制动踏板的位置。CPP传感器测量车辆的乘客舱内的离合器踏板的位置。其他传感器193还可以包括一个或多个加速度传感器,其测量车辆的纵向(例如,前/后)加速度和车辆的横向加速度。加速度计是加速度传感器的示例性类型,但是可以使用其他类型的加速度传感器。ECM 114可以使用来自传感器的信号来为发动机102做出控制决定。
ECM 114可以与变速器控制模块194通信,例如以使变速器195中的换挡与发动机操作协调。ECM 114可以与混合控制模块196通信,例如以协调发动机102和电动马达198的操作。尽管提供了一个电动马达的示例,但是可以实施多个电动马达。电动马达198可以是永磁电动马达或在自由自旋时基于反电磁力(back electromagnetic force)(EMF)输出电压的另一合适类型的电动马达,诸如直流(DC)电动马达或同步电动马达。在各种实施方式中,ECM 114、变速器控制模块194和混合控制模块196的各种功能可以集成到一个或多个模块中。
改变发动机参数的每个系统可以被称为发动机致动器。每个发动机致动器都有关联的致动器值。例如,节气门致动器模块116可以被称为发动机致动器,并且节气门打开面积可以被称为致动器值。在图5的示例中,节气门致动器模块116通过调节节气门112的叶片的角度来实现节气门打开面积。
火花致动器模块126也可以被称为发动机致动器,而对应的致动器值可以是相对于气缸TDC的火花提前量。其他发动机致动器可以包括气缸致动器模块120、燃料致动器模块124、相位器致动器模块158、废气门致动器模块164和EGR致动器模块172。对于这些发动机致动器,致动器值可以分别对应于气缸激活/停用序列、加油速率、进气和排气凸轮相位器角度、目标废气门开度和EGR阀开度。
ECM 114可以控制致动器值,以便致使发动机102基于扭矩请求输出扭矩。ECM 114可以例如基于一个或多个驾驶员输入,诸如APP、BPP、CPP和/或一个或多个其他合适的驾驶员输入来确定扭矩请求。ECM 114可以例如通过使用将驾驶员输入与扭矩请求相关联的一个或多个功能或查找表来确定扭矩请求。
在一些情况下,混合控制模块196控制电动马达198输出扭矩,例如以补充发动机扭矩输出。混合控制模块196还可以在发动机102停机时控制电动马达198输出用于车辆推进的扭矩。
混合控制模块196将来自MODACS 208的电功率施加到电动马达198,以致使电动马达198输出正扭矩。在下文中进一步描述MODACS 208。电动马达198可以将扭矩输出至例如变速器195的输入轴、至变速器195的输出轴或另一部件。离合器200可以实施为以将电动马达198联接至变速器195以及将电动马达198与变速器195分离。可以在电动马达198的输出与变速器195的输入之间实施一个或多个传动装置,以在电动马达198的旋转与变速器195的输入的旋转之间提供一个或多个预定的传动比。在各种实施方式中,可以省略电动马达198。
ECM 114经由起动马达202起动发动机102。车辆的ECM 114或另一合适的模块使起动马达202与发动机102接合,以进行发动机起动事件。仅作为示例,当接收到按键ON命令时,ECM 114可以使起动马达202与发动机102接合。驾驶员可以例如经由致动车辆或车辆的密钥卡(key fob)的一个或多个点火按键、按钮和/或开关来输入按键ON命令。起动马达202可以接合联接到曲轴的飞轮或驱动曲轴的旋转的一个或多个其他合适的部件。
ECM 114还可以响应于自动停止/起动事件期间的自动起动命令或响应于航行事件的发动机起动命令来起动发动机。自动停止/起动事件包括在车辆停止、驾驶员已踩下制动踏板并且驾驶员尚未输入按键OFF命令的同时关闭发动机102。例如,当驾驶员释放制动踏板和/或踩下油门踏板时,可以在为自动停止/起动事件而关闭发动机102的同时生成自动起动命令。
航行事件可以包括ECM 114在车辆正在移动(例如,车辆速度大于预定速度,诸如每小时50英里)、驾驶员未致动油门踏板,且驾驶员尚未输入按键OFF命令时关闭发动机102。例如,当驾驶员踩下油门踏板时,可以在为航行事件而关闭发动机102的同时生成发动机起动命令。如上文所述,驾驶员可以例如经由致动一个或多个点火按键、按钮和/或开关来输入按键OFF命令。
起动马达致动器(诸如螺线管)可以致动起动马达202以使其与发动机102接合。仅作为示例,起动马达致动器可以使起动器小齿轮与联接至曲轴的飞轮接合。在各种实施方式中,起动器小齿轮可以经由驱动轴和单向离合器联接到起动马达202。起动器致动器模块204基于来自起动器控制模块的信号来控制起动马达致动器和起动马达202,如下文进一步讨论地。在各种实施方式中,起动马达202可以维持成与发动机102处于接合。
响应于使发动机102起动的命令(例如,自动起动命令,用于航行事件结束的发动机起动命令,或者当接收到按键ON命令时),起动器致动器模块204向起动马达202供应电流以起动发动机102。起动器致动器模块204还可以致动起动马达致动器以使起动马达202与发动机102接合。起动器致动器模块204可以在将起动马达202与发动机102接合之后向起动马达202供应电流,例如以允许齿啮合。
至起动马达202的电流施加驱动起动马达202的旋转,并且起动马达202驱动曲轴的旋转(例如,经由飞轮)。起动马达202驱动曲轴以起动发动机102的期间可以称为发动机启动。
起动马达202从MODACS 208汲取功率以起动发动机102。一旦在发动机起动事件之后发动机102运转,则起动马达202脱离发动机102或从发动机102脱离,并且可以停止流向起动马达202的电流。例如,当发动机速度超过预定速度,诸如预定怠速时,发动机102可以被认为是在运转。仅作为示例,预定的怠速可以是大约每分钟700转(rpm)或另一合适的速度。当发动机102正在运转时,可以说发动机启动已经完成。
发电机206将发动机102的机械能转换成交流(AC)功率。例如,发电机206可以(例如,经由齿轮或带)联接至曲轴,并且通过向曲轴施加负载来将发动机102的机械能转换为AC功率。发电机206将AC功率整流为DC功率,并将DC功率存储在MODACS 208中。替代地,可以实施在发电机206外部的整流器,以将AC功率转换成DC功率。发电机206可以是例如交流发电机。在各种实施方式中,诸如在皮带式交流发电机起动器(BAS)的情况下,起动马达202和发电机206可以一起实施。
图6是MODACS 208的功能框图。MODACS 208可以被实施为具有多个源端子的单个电池。示出了三个示例性源端子210、214、216,但是可以包括任何数量的源端子。可以被称为正输出端子的源端子提供相应的直流(DC)操作电压。MODACS可以包括仅一个负端子,或者可以包括用于每个源端子的负端子。仅作为示例,MODACS 208可以具有第一正(例如48伏(V))端子210、第一负端子212、第二正(例如第一12V)端子214、第三正(例如第二12V)端子216和第二负端子220。虽然提供了具有48V操作电压和两个12V操作电压的MODACS 208的示例,但是MODACS 208可以具有一个或多个其他操作电压,诸如只有两个12V操作电压、只有两个48V操作电压、12V的操作电压以及两个48V操作电压,或者两个或更多个其他合适的操作电压的组合。作为另一示例,操作电压可以在12V-144V的范围内。
MODACS 208包括电芯(cell)和/或电芯的组块,诸如第一组块224-1至第N组块224-N(“组块224”),其中N是大于或等于2的整数。组块224中的每者可以包括一个或多个CAB电芯和/或一个或多个非CAB电芯。每个CAB电芯包括LIB电极和LIC电极。在CAB电芯的每者中,LIC电极的数量可以小于LIB电极的数量。作为示例,在CAB电芯中,电极中的4%可以是LIC电极,且电极中的96%是LIB电极。每个组块可以被实施为CAB模块或非CAB模块。在一个实施例中,每个CAB模块和非CAB模块具有为12V的整数倍的输出电压。每个组块在MODACS208内也可以是单独可替换的。仅作为示例,组块224中的每者可以是单独容纳的12V DC电池。单独替换组块224的能力可以使得MODACS 208能够包括更短的保修期并具有更低的保修成本。例如,在组块中发生故障的情况下,组块224也是单独可隔离的。在各种实施方式中,MODACS 208可以具有标准汽车级12V电池的形状因子。
组块224中的每者具有其自己单独的容量(例如,以安培小时Ah为单位)。MODACS208包括开关,诸如第一开关232-1至232-N(统称为“开关232”)。开关232使得组块224能够以串联、并联或串联和并联的组合的形式连接,以在输出端子处提供期望的输出电压和容量。
MODACS控制模块240控制开关232,以在源端子处提供期望的输出电压和容量。MODACS控制模块240基于车辆的当前操作模式控制开关232,以改变在源端子处提供的容量,如下文中进一步讨论的。
图7A-图7B示出了包括MODACS 208的示例性实施方式的车辆电气系统300。MODACS208包括源端子210、214、216、相应的功率轨301、302、303、MODACS控制模块240和功率控制电路305,所述功率控制电路可以连接到MODACS控制模块240和车辆控制模块(VCM)和/或BCM 306。VCM和/或BCM 306可以类似于图5的ECM 114操作、包括和/或实施为图5的ECM114。功率轨303可以是冗余功率轨和/或用于与功率轨302不同的负载。MODACS控制模块240、功率控制电路305和VCM和/或BCM 306可以经由控制器局域网(CAN)、本地互连网络(LIN)、串行网络、无线和/或另一合适的网络和/或接口彼此通信。MODACS控制模块240可以直接与VCM和/或BCM 306通信或如图所示的经由功率控制电路305间接地与VCM和/或BCM306通信。
在图7A的示例中,组块224中的一组4个组块(例如12V组块)可串联连接(经由开关232中的几个开关)到第一正端子210和第一负端子212,以提供第一输出电压(例如48V)。组块224中的单个的组块可以(经由开关232中的几个开关)连接到第二正端子214或第三正端子216和第二负端子220,以在第二正端子214和第三正端子216处提供第二输出电压(例如12V)。组块224中的多少组块被连接到第一正端子210、第二正端子214和第三正端子216指示在每个正端子处可用的MODACS 208的总容量的部分。可以将任意数量的组块串联连接,并且可以将任意数量的串联组并联连接。在图7A的示例中,组块224被示出为CAB模块和非CAB模块。CAB模块被标记为“CAB”,且非CAB模块以电池符号示出。该示例包括:包括仅CAB模块的两个系列、包括CAB模块和非CAB模块两者的一个系列,以及包括仅非CAB模块的三个系列。可以调节仅CAB模块系列的数量、具有CAB和非CAB模块两者的系列的数量以及具有仅非CAB模块的系列的数量。而且,每个系列中的CAB模块的数量和非CAB模块的数量可以被调节并且可以不同。在图12至图22中示出了CAB模块以及可以在CAB模块中实施的CAB电芯的示例。
如在图7B中所示,第一组车辆电气部件使用MODACS 208的两个或更多个操作电压中的一者来操作。例如,第一组车辆电气部件可以连接到第二正端子214和第三正端子216。第一组车辆电气组件中的一些可以连接到第二正端子214,并且第一组车辆电气组件中的一些可以连接到第三正端子216。第一组车辆电气部件可以包括,例如但不限于,VCM和/或BCM 306以及车辆的其他控制模块、起动马达202和/或其他电气负载,诸如第一12V负载307、第二12V负载308、其他控制模块312、第三12V负载316和第四12V负载320。在各种实施方式中,开关装置324可以连接到第一正端子和第二正端子214两者。开关装置324可以将其他控制模块312和第三12V负载316连接到第二正端子214或第三正端子216。
如在图7A中所示,第二组车辆电气部件使用MODACS 208的两个或更多个操作电压中的另一个操作电压来操作。例如,第二组车辆电气部件可以连接到第一正端子210。第二组车辆电气部件可以包括例如但不限于发电机206和各种电气负载,诸如48V负载328。发电机206可以被控制为对MODACS 208再充电。
开关232中的每者可以是绝缘栅双极晶体管(IGBT)、场效应晶体管(FET),诸如金属氧化物半导体FET(MOSFET)或另一合适类型的开关。
图8示出了可应用于本文中所公开的MODACS的另一车辆控制系统400的示例。车辆控制系统400包括MODACS 402、车辆控制模块404、内燃发动机(ICE)406、高压负载408和低压负载410。高压负载408可以包括电动马达、压缩机和/或其他高压负载。低压负载可以包括灯、座椅加热器、电风扇、音频系统、视频系统、电动车窗马达、电动门锁马达、电子电路等。MODACS 402具有壳体420,并包括MODACS控制模块422、第一源端子424、第二源端子426和负(或参考接地)端子428。MODACS 402可以具有任何数量的源端子。
ICE 406可以经由滑轮431、432和皮带434驱动水泵430。ICE 406可以驱动主齿轮436,主齿轮436驱动离合器C1、C2和变速器438,以经由差速器442驱动车轮440。第一离合器C1可以用于接合滑轮444、446和皮带448,滑轮444、446和皮带448驱动马达发电机单元(MGU)450。第二离合器C2可以用于接合变速器438。AC至DC转换器452将来自MGU 450的交流电(AC)功率转换为DC电功率,该DC电功率用于为MODACS 402的电芯充电。当启动ICE 406时,主齿轮436可以经由起动器456被第二齿轮454转动。
图9示出了车辆500,其图示了MODACS的另一示例性实施方式,其可以替代和/或与图5至图9的MODACS 208和402类似地操作。车辆500可以包括具有MODACS控制模块503的MODACS 502、车辆控制模块504、信息娱乐模块506和其他控制模块508。模块503、504、506、508可以经由控制器局域网(CAN)总线510和/或其他合适的接口彼此通信。车辆控制模块504可以控制车辆系统的操作。车辆控制模块504可以包括模式选择模块512、参数调节模块514以及其他模块。模式选择模块512可以选择车辆操作模式,诸如上述车辆操作模式之一。参数调节模块514可以用于调节车辆500的参数。
车辆500还可以包括:内存518;显示器520;音频系统522;包括传感器526的一个或多个收发器523;以及导航系统527,其包括全球定位系统(GPS)接收器528。传感器526可以包括传感器、摄像机、对象检测传感器、温度传感器、加速度计、车辆速度传感器和/或其他传感器。GPS接收器528可以提供车辆的速度和/或车辆的方向(或前进方向)和/或全球时钟定时信息。
内存518可以存储传感器数据530和/或车辆参数532、MODACS参数534和应用程序536。应用程序536可以包括由模块503、504、506、508执行的应用程序。尽管内存518和车辆控制模块504被示出为单独的装置,但是内存518和车辆控制模块504可以被实施为单个装置。
车辆控制模块504可以根据由模块503、504、506、508设置的参数来控制发动机540、转换器/发电机542、变速器544、车窗/门系统550、照明系统552、座椅系统554、反射镜系统556、制动系统558、电动马达560和/或转向系统562。车辆控制模块504可以基于从传感器526接收的信号来设置一些参数。车辆控制模块504可以从MODACS 502接收功率,该功率可以被提供给发动机540、转换器/发电机542、变速器544、车窗/门系统550、照明系统552、座椅系统554、反射镜系统556、制动系统558、电动马达560和/或转向系统562等。一些车辆控制操作可以包括解锁车窗/门系统550的门、启用发动机540的燃油和火花、起动电动马达560、为系统550、552、554、556、558、562中的任一者提供功率和/或执行其他操作,如本文中进一步描述的。
发动机540、转换器/发电机542、变速器544、车窗/门系统550、照明系统552、座椅系统554、反射镜系统556、制动系统558、电动马达260和/或转向系统562可以包括由车辆控制模块504控制的致动器,以例如调节燃料、火花、空气流、方向盘角度、节气门位置、踏板位置、门锁、车窗位置、座椅角度等。该控制可以是基于传感器526、导航系统527、GPS 528的输出以及存储在内存518中的上述数据和信息。
车辆控制模块504可以确定各种参数,其包括车辆速度、发动机速度、发动机扭矩、齿轮状态、加速度计位置、制动踏板位置、再生(充电)功率的量、增压(放电)功率的量、自动启动/停止放电功率的量和/或其他信息,诸如MODACS 502的源端子的优先级、每个源端子的功率、电流和电压需求等。车辆控制模块504可以与MODACS控制模块503共享此信息和车辆操作模式。MODACS控制模块503可以确定其他参数,诸如:每个源端子处的充电功率的量;每个源端子处的放电功率的量;源端子处的最大和最小电压;功率轨、电芯、组块、包和/或组处的最大和最小电压;电芯、组块、包和/或组的SOX值;电芯、组块、包和/或组的温度;电芯、组块、包和/或组的电流值;电芯、组块、包和/或组的功率值等。MODACS控制模块503可以基于由车辆控制模块504和/或MODACS控制模块503确定的参数,来确定如本文中所述的电芯和对应开关状态的连接配置。
图10示出了MODACS 600,其包括负(或接地参考)端子602、源端子604、606、608和MODACS控制模块610。尽管示出了三个源端子,但是MODACS 600可以包括任意数量的源端子。负端子602连接到负端子612。源端子604、606、608以相应的电压供应和/或接收功率。在所示示例中,源端子604、606、608是48V、12V、12V端子。在一个实施例中,端子606、608被称为12VA和12VB端子。源端子604可以连接到起动器发电机单元(SGU)620和48V负载622。48V负载可以包括例如马达、压缩机和/或其他高压负载。SGU 620被示出为示例。在一个实施例中,包括一个或多个48V启动器、一个或多个48V发电机和/或48V SGU。源端子606、608可以连接到12V起动器630和12V负载632。
图11示出了MODACS 700,其包括负(或接地参考)端子702、源端子704、706、708和MODACS控制模块710。尽管示出了三个源端子,但是MODACS 700可以包括任何数量的源端子。负端子702可以连接到接地参考端子712。源端子704、706、708以相应的电压供应和/或接收功率。在所示示例中,源端子704、706、708是48V、12V、12V端子。端子706、708可以被称为12VA和12VB端子。源端子704可以连接到起动器发电机单元(SGU)720、48V负载722和48V起动器724。源端子706、708可以连接到12V负载730。
基于车辆操作模式和MODACS操作模式,当对应发动机的温度高于预定温度时,上述SGU、48V起动器和/或12V起动器可以用于热起动。作为示例,当在纯电动模式下操作(发动机关闭)并且SGU提供功率以驱动车辆时,可以使用12V起动器或48V起动器来起动发动机。当对应发动机的温度低于预定温度时,可以将48V起动器或12V起动器用于冷起动。图10至图11在不使用DC至DC转换器的情况下被实施。
图12示出了包括CAB电芯1202的CAB模块1200,如本文中所公开的,CAB电芯1202可以具有任何数量的电池电极和电容器电极。本文所指的电池电极具有电池材料的阴极层和阳极层。作为示例,阴极层可以由LMO、LFP、NMC、LNMO和/或其他合适的电池阴极材料形成。阳极层可以由氧化硅(SiOx)、LTO、石墨和/或其他合适的电池阳极材料形成。本文所指的电容器电极具有电容器材料的阴极和阳极层。电容器阴极材料可以包括活性炭和/或其他合适的电容器阴极材料。电容器阳极材料可以包括石墨、锂化石墨(lithiated graphite)、锂化SiOx、LTO和/或其他合适的电容器阳极材料。CAB电芯可以包括与LIB+端子1204并联连接的预定数量的电池阴极电极、与LIB-端子1206并联连接的预定数量的电池阳极电极、与LIC+端子1208并联连接的预定数量的电容器阴极电极以及与LIC-端子1210并联连接的预定数量的电容器阳极电极。
CAB电芯1202的LIB电池电极经由导电元件(例如,导线)1212串联连接。CAB电芯1202的LIC电容器电极经由导电元件(例如,导线)1214串联连接。第一CAB电芯的LIB+和LIC+端子经由导电元件1218、1219连接到相应的开关1220、1222。开关1220、1222连接到正端子1224。最后的CAB电芯的LIB-和LIC-端子经由导电元件1226连接到负端子1228。CAB电芯1202中的每者包括4个端子(或接线片(tab))。
开关1220、1222(称为LIB和LIC开关)经由MODACS控制模块240控制。MODACS控制模块240可以基于操作模式来接通(或将开关转换为ON状态)和断开(或将开关转换为OFF状态)。表1提供了示例性操作模式以及LIB和LIC开关的对应状态。对于表1的示例,所有的LIB开关可以是ON或OFF,且所有的LIC开关可以是ON或OFF,并且CAB电芯1202包括:由NMC形成的LIB阴极;由石墨形成的LIB和LIC阳极;以及由活性炭(AC)形成的LIC阴极。
MODACS模块240可以监测每个CAB电芯的LIB端子两端和LIC端子两端的电压,并且基于该电压,接通或断开开关1220、1222。CAB电芯电压指的是由该CAB电芯提供的电压,并且可以包括LIB端子、LIC端子和/或LIB端子和LIC端子的并联连接组合的两端的电压。在图12的示例中,当CAB电芯电压和/或CAB电芯中的一者或多者中的每者的LIC端子两端的电压大于或等于3.9V时,MODACS控制模块240断开开关1222以使LIC电极断开连接。这允许电池电极充电至大于3.9的电压,同时防止LIC电极充电超过3.9V。作为示例,MODACS控制模块240可以将CAB电芯电压和/或LIB端子两端的电压维持为小于或等于5V。
可以通过所包括并串联连接的CAB电芯的数量来调节CAB模块1200的在端子1224和1228两端的总电压。CAB模块1200的总电压可以是例如12V、24V、36V、48V等。在一个实施例中,CAB电芯1202和开关1220、1222设置在单个壳体中。在另一实施例中,开关1220、1222设置在第一CAB电芯的壳体中。
本文中所公开的CAB电芯1202中的一者或多者和/或其他CAB电芯可以被一个或多个非CAB电芯替换。非CAB电芯不包括LIC端子和/或电极。作为示例,如果将CAB电芯1202中的一者替换为非CAB电芯,则除了三个CAB电芯的LIC端子将串联连接并且四个电芯的LIB端子将串联连接之外,连接将是类似的。
图13示出了包括CAB电芯1302的CAB模块1300。CAB电芯1302包括:由NMC形成的LIB阴极、由石墨形成的LIB和LIC阳极以及由AC形成的LIC阴极。每个CAB电芯1302包括LIB端子1304、1305和LIC端子1306、1307以及对应的LIB开关1308和LIC开关1310。开关1308、1310允许并且所示的对应导电元件允许每个CAB电芯的LIB电极和LIC电极选择性地连接到CAB模块端子1320、1322。MODACS控制模块240可以基于操作模式来控制开关。表2示出了示例性操作模式以及开关1308、1310的对应状态。
MODACS模块240可以选择性地接通(或连接)CAB电芯1302中的一者或多者的LIB端子,并且选择性地接通CAB电芯1302中一者或多者的LIC端子。这可以基于每个CAB电芯1302的LIB端子两端的电压和LIC端子两端的电压和/或操作模式。表2提供了一示例,其中,对于冷启动、增压和自动起动模式,CAB电芯中的一者或多者的LIC端子接通,而对于其他模式,所有CAB电芯的LIC端子被断开或接通。在一个实施例中,CAB电芯1302和开关1308、1310设置在单个壳体中。在另一实施例中,开关1308、1310被设置在CAB电芯1302的对应壳体中。
图14示出了包括CAB电芯1402的CAB模块1400。CAB电芯1402包括:由NMC形成的LIB阴极;由石墨形成的LIB和LIC阳极;以及由AC形成的LIC阴极。每个CAB电芯1402包括LIB+端子1404、LIC+端子1406和CAB-端子1408(也称为LIB和LIC共享阳极端子)。CAB模块1400包括将LIC+端子连接到LIB+端子的LIC开关1410。因此,可以通过MODACS模块240选择性地连接LIC+端子。CAB电芯1402通过导电元件1412串联连接,该导电元件1412将CAB电芯的CAB-端子连接到下一个CAB电芯的LIB+端子。第一个LIB+端子、最后一个CAB-端子分别连接到CAB模块1400的正端子1420和负端子1422。MODACS控制模块240可以基于操作模式来控制开关。表3示出了示例性操作模式以及开关1410的对应状态。
MODACS模块240可以选择性地接通CAB电芯1402中的一者或者多者的LIC端子。这可以基于每个CAB电芯1402的LIB+和CAB-端子两端的电压和/或LIC+和CAB-端子两端的电压和/或操作模式。表3提供了一示例,其中,对于冷启动和增压模式,CAB电芯中的一者或者多者的LIC端子接通,然而对于其他模式,所有CAB电芯的LIC端子断开或接通。在一个实施例中,CAB电芯1402和开关1410设置在单个壳体中。在另一实施例中,开关1410设置在CAB电芯1402的相应壳体中。
图15示出了CAB模块1500,其包括具有LIB端子1504、1506和LIC端子1508、1510的单个CAB电芯1502。LIB+端子1504和LIC+端子1508经由相应的开关1514、1516连接到正端子1512。LIB-端子1506和LIC-端子1510连接到负端子1518。CAB电芯1502被实施为具有固态电解质(例如,基于陶瓷的锂镧锆氧化物Li
MODACS控制模块240(图15中未示出)可以基于CAB电芯1502的LIB、LIC电压和总电压以及操作模式来控制开关1514、1516的状态。在表4中示出了开关1514、1516的用于不同操作模式的示例性状态。
在一个实施例中,CAB电芯1502和开关1514、1516设置在单个壳体中。在另一实施例中,开关1514、1516设置在CAB电芯1502的壳体中。与本文中所公开的其他CAB电芯一样,CAB电芯1502具有双极架构。可以通过调节CAB电芯1502中所包括的电池电极和电容器电极的大小、材料、间距等来调节CAB模块1500的电压。
图16示出了包括单个CAB电芯1602的CAB模块1600,该单个CAB电芯1602具有LIB+端子1604、LIC+端子1606和CAB-端子1608。端子1604、1608经由相应的开关1612、1614连接到正端子1610。CAB-端子1608连接到负端子1616。CAB电芯1602可以被实施为SSB电芯。CAB模块1600类似于CAB模块1300,但是包括单个CAB电芯和固体电解质。
MODACS控制模块240(图16中未示出)可以基于CAB电芯1602的LIB、LIC电压和总电压以及操作模式来控制开关1612、1614的状态。在表4中示出了开关1612、1614的用于不同操作模式的示例性状态。
图17示出了CAB模块1700,其包括具有LIB端子1704、1706和LIC端子1708、1710的双CAB电芯1702。第一CAB电芯的LIB+端子1704和LIC+端子1708经由相应的开关1714、1716连接到正端子1712。第二CAB电芯的LIB-端子1706和LIC-端子1710连接到负端子1718。CAB电芯1702经由导电元件1720串联连接。
CAB电芯1702被实施为具有固体电解质(例如,陶瓷=硫化物基的锂锗磷硫化物Li
MODACS控制模块240(在图17中未示出)可以基于CAB电芯1702的LIB、LIC和总电压以及操作模式来控制开关1714、1716的状态。在表4中示出了开关1714、1716的用于不同操作模式的示例状态。
在一个实施例中,CAB电芯1702和开关1714、1716设置在单个壳体中。在另一实施例中,开关1714、1716设置在CAB电芯1702的壳体中。CAB电芯1702具有双极架构。可以基于例如在CAB模块1700中所包括的CAB电芯的数量调节CAB模块1700的电压。
图18示出了具有LIB端子1802、1804和LIC端子1806、1808的CAB电芯1800。在图18中,用于CAB电芯1800的样本电芯架构被示出为具有三种不同类型的电极:LIB阴极电极1810(示出了其中之一)、LIC阴极电极1812(示出了其中之一)以及阳极电极1814(示出了其中三个)。本文中所公开的具有四个端子的CAB电芯可以具有CAB电芯1800的组成。CAB电芯1800可以具有三种类型的电极中的每一种的各种数量。在一个实施例中,LIB和LIC电极的总数量中的预定百分比(例如,小于或等于4%)是LIC电极。尽管在图18示出了每种类型的电极1810、1812、1814的特定数量,但是可以包括任何数量的每种电极。
在一个实施例中,LIB阴极电极1810由NMC形成,阳极电极1814由石墨形成,并且当CAB电芯1800的LIB侧完全放电(例如,充电60%)时电压可以为2.7V,且充满电(例如,80%充电)时可以为4.2V。LIC侧的电压可以是2.7V-3.9V,且LIC阴极和阳极电极可以由活性炭形成。LIC阳极电极可以由石墨形成。作为另一示例,如果LIB阴极电极1810由LNMO形成,则完全放电至充满电的电压范围可以是3-5V。如果LIB阴极电极1810由LFP形成,则完全放电至充满电的电压范围可以是2-3.65V。
以下图19至图22示出了不同的示例性电芯端子架构。图19示出了CAB电芯1900,其包括在CAB电芯1900的与LIB阴极1906相同的侧1904上的单个CAB阳极1902。CAB电芯1900包括在CAB电芯1900的相对侧上的LIC阴极1908。图20示出了CAB电芯2000,该CAB电芯2000包括在CAB电芯的与LIB和LIC阴极2004、2006不同的一侧上的单个CAB阳极2002。作为示例,图19至图20的CAB电芯1900和2000的LIC阴极电极的材料可以由活性炭形成,并且LIB阳极电极可以由NMC形成。CAB阳极电极可以由石墨形成。
图21示出了在与LIB阳极2104相同的一侧上包括单个CAB阴极2102的CAB电芯2100。LIC阳极2106在与端子2102、2104相对的一侧上。图22示出了在与LIB和LIC阳极2204、2206不同的一侧上包括单个CAB阴极2202的CAB电芯2200。
作为示例,图21至图22的CAB电芯2100和2200的CAB阴极电极的材料可以由NMC形成。LIC阳极电极可以由诸如氧化钌(RuO
本文中所公开的CAB电芯的CAB电芯格式可以是棱柱和/或囊型。例如,可以被包括在例如图7A的CAB模块和/或本文中所公开的其他CAB模块中的CAB电芯类型可以是基于液体电解质的,带有固体电解质的SSB型和/或可以是包括半液体电解质的混合型。半液体电解质可包括例如(i)液体和聚合物,(ii)液体和陶瓷颗粒,和/或(iii)其他半液体电解质。本文中所公开的CAB模块系列、非CAB模块系列、CAB模块和非CAB模块系列、和CAB模块的总电压可以均是大致12-150V。
图23示出了用于具有任何数量的组块、模块和电芯的电池包2302的示例性电池监测(或管理)系统(BMS)模块2300。在所示示例中,BMS模块2300监测组块或包2302的对应一个或多个电芯的电压、温度和电流水平,并确定某些参数。参数可以包括瞬时充电和放电功率和电流限值、短期充电和放电功率和电流限值,以及连续充电和放电功率和电流限值。参数还可以包括最小和最大电压、最小和最大操作温度以及SOX限值和/或值。可以基于所监测的电压、温度和/或电流水平来确定由BMS模块2300输出的参数。12V组块或包的充电和放电功率以及电流能力受最小和最大电压、最小和最大操作温度以及对应电芯的SOX限值和/或值影响。BMS模块2300可以监测单个电芯电压、温度和电流水平,并基于该信息确定所述参数。由BMS模块2300输出的参数示出为离开BMS模块2300的箭头。由BMS模块2300接收到的参数示出为指向BMS模块2300的箭头。
作为示例,BMS模块2300可以包括和/或连接到传感器,诸如电流传感器2304和温度传感器2306,其可以用于检测通过组块或包2302的电芯的电流水平以及组块或包2302的温度。作为示例,可以如图所示地检测组块或包两端的电压。在一实施例中,可以包括一个或多个电压传感器以检测组块或包2302的电压。电流传感器2304可以连接在例如组块或包2302与源端子2308之间,源端子2308可以连接到负载2310。温度、电压和电流水平作为由BMS模块2300接收到的一些参数报告给BMS模块2300。
图24示出了包括一个或多个源端子的MODACS电路2400。MODACS电路2400可以包括以最小开关数拓扑布置的多功能固态开关、开关驱动电路、电流和电压感测电路,以实现对具有类似或不类似的预设(或目标)电压的源端子的按需容量分配。MODACS电路2400是灵活的、模块化的,并且具有最小的大小、复杂度、重量和部件数。至少由于这些原因,MODACS电路2400使制造难度最小化。
如图所示,MODACS电路2400包括组块,其中,每个组块包括一个或多个电芯、4个或更多个开关、BMS模块和具有对应功率轨的源端子。概述了示例性组块2402,且其包括一个或多个电芯2404、4个开关2406以及BMS模块2408。电芯可以是CAB电芯或非CAB电芯。CAB电芯示出为CAB组块,且非CAB电芯利用电池符号示出。开关2406中的三个开关将电芯2404分别连接到源端子(例如,示出了48V、12VA和12VB源端子)。4个开关2406中的第4个开关将电芯2404连接到接地参考(或负端子)2412。
如图所示,组块可以布置成具有行和列的阵列。除了最靠近接地参考的行中的一个之外,每个组块可以被配置为相同的。在该行中,每个组块都包括三个开关,而不是四个开关。因此,如图所示,对应电芯在不使用开关的情况下连接到接地参考。
如能够看到的,每个组块的电芯可以连接到每个源端子。任何电芯都可以连接到源端子中的任何一者或多者。在一行(或第一行)中的组块中的第一开关可以连接到第一源端子(48V源端子)。在一个或多个中间行(例如,第二和第三行)中的组块中的第一开关可以连接到在前一行中的电芯。这允许每一列中的组块中的电芯串联连接。在某些条件下,在列中的组块串联连接以形成两个或更多个组块系列,而多个组块系列并联连接以最大化至第一源端子的功率。
MODACS电路2400还包括控制组块的状态的MODACS控制模块2420。MODACS控制模块2420从BMS模块接收BMS信号,并从车辆控制模块接收系统容量请求信号。基于电压源端子的优先级、参数以及由系统容量请求信号指示的功率和电流需求,MODACS控制模块2420确定连接配置并设置组块的开关的状态。参数可以包括BMS信号中指示的电压、功率水平、电流水平和温度。MODACS控制模块2420生成指示用于源端子的容量分配的实际容量分配信号。取决于如下,实际容量分配可以与所请求的容量分配不匹配:MODACS的状态(包括是否存在任何故障或短路);以及电芯的SOH。实际容量分配信号可以从MODACS控制模块2420传输到车辆控制模块。
MODACS电路2400包括12V开关矩阵、架构和开关控制件,以使得能够通过使用DC至DC转换器,诸如48V至12V DC至DC降压(buck)或增压转换器来消除12V稳定化,和/或消除12V和/或48V冗余备用电源。MODACS电路2400具有用于一个高功率高压(例如,大于或等于24V的V1)源端子和至少两个低功率低压(例如,两个12V)源端子的最小电路、组块、开关配置。开关可以是用于快速无噪声重新配置的固态开关。可以将开关配置用于双向电压和电流封阻能力,以防止在高压源端子和低压源端子之间发生短路。配置成用于单向电压和电流封阻的开关可以被用于选择性地最小化损耗。
开关可以在单芯片或多芯片封装中实施。开关可以包括增强模式的金属硅氧化物半导体场效应晶体管(MOSFET)、氮化镓(GaN)FET、碳化硅(SiC)MOSFET,绝缘栅双极晶体管(IGBT)和/或其他开关。出于阻抗匹配的目的,开关可以处于ON状态、OFF状态或线性操作状态。开关可以与驱动器和联锁逻辑集成在一起,以防止在组块之间、在不同源端子之间以及在源端子和接地参考之间的短路。基于车辆控制模块需求以及以来自组块的BMS模块的反馈信号的形式的状态更新,开关被控制以在每个源端子处实现期望的容量。
在一实施例中,电芯是锂电池电芯,但是可以是其他类型的电芯。示出图24的示例以说明一种简约架构,该简约架构具有最小数量的组块和每个组块的最小数量的开关,以在没有DC至DC转换器的情况下提供48V、12VA和12VB输出。
图25示出示例性CAB电芯2500的电极架构。CAB电芯2500包括以并联组合连接的电池电极(其中一些被标记为2502)和电容器电极(其中一些被标记为2504)。LIB阳极电极2506和LIC阳极电极2508被连接到相同端子2510。LIB阴极电极2512和LIC阴极电极2514被连接到相同端子2516。电极2506、2508和2514中的每者可以包括如所描述的附接至居中设置的集电箔2520的阴极材料层或阳极材料层。隔离层(未示出)可以被设置在邻近的电极对之间。图25被提供为CAB电芯的示例。本文中所公开的CAB电芯可以具有类似的架构或不同的架构。例如,CAB电芯2500被示出为具有两个端子,但是可以具有三个或者更多个端子以及对应电池和电容器电极。
提供示例性实施例,使得本公开将是透彻的,并将范围完全传达给本领域技术人员。阐述了许多具体细节,诸如具体组成、部件、装置和方法的示例,以提供对本公开的实施例的透彻理解。对于本领域技术人员将显而易见的是,不需要采用具体细节,示例性实施例可以以许多不同的形式来实现,并且都不应当被解释为限制本公开的范围。在一些示例性实施例中,未详细描述公知的过程、公知的装置结构和公知的技术。
尽管在本文中可以使用术语第一、第二、第三等来描述各种步骤、元件、部件、区域、层和/或区段,但是除非另外指示,否则这些步骤、元件、部件、区域、层和/或区段不应当受到这些术语的限制。这些术语可以仅用于将一个步骤、元件、部件、区域、层或区段与另一步骤、元件、部件、区域、层或区段进行区分。除非通过上下文明确指示,否则诸如“第一”、“第二”的术语和其他数字术语当在本文中使用时不意味着序列或次序。因此,在不脱离示例性实施例的教导的情况下,在下文中讨论的第一步骤、元件、部件、区域、层或区段可以称为第二步骤、元件、部件、区域、层或区段。
为了便于描述,可以在本文中使用空间或时间相对的术语,诸如“之前”、“之后”、“内部”、“外部”、“之下”、“下方”、“下部”、“上方”、“上部”等,以描述如在附图中所示的一个元件或特征与另一元件或特征的关系。除了附图中所描绘的定向之外,空间或时间相对的术语还可以旨在包含在使用或操作中的装置或系统的不同定向。
前述描述本质上仅是说明性的,且绝不旨在限制本公开、其应用或用途。本公开的宽泛教导能够以多种形式实施。因此,虽然本公开包括具体示例,但是本公开的真正范围不应当受限于此,因为在研究附图、说明书和所附权利要求之后,其他的修改将变得显而易见。应当理解,在不改变本公开的原理的情况下,方法内的一个或多个步骤可以以不同的次序(或者同时)执行。此外,尽管每个实施例在上文中被描述为具有某些特征,但是关于本公开的任何实施例描述的那些特征中的任何一个或者多个能够在任何其他实施例中实施和/或与任何其他实施例的特征组合实施,即使没有明确地描述该组合。换言之,所描述的实施例不是互相排斥的,并且一个或多个实施例彼此的排列仍在本公开的范围内。
使用各种术语来描述元件之间(例如,在模块、电路元件、半导体层等之间)的空间和功能关系,所述术语包括“被连接”、“被接合”、“被联接”、“相邻”、“靠近”、“在...上方”,“上方”,“下方”和“被设置”。除非明确地描述为“直接的”,否则当在上述公开中描述了第一元件和第二元件之间的关系时,该关系可以是其中在第一元件和第二元件之间不存在其他中间元件的直接关系,但是也可以是其中在第一元件和第二元件之间存在(空间或者功能上存在)一个或多个中间元件的间接关系。如在本文中使用的,短语A、B和C中的至少一者应当解释为意思是使用非排他逻辑OR的逻辑(A OR B OR C),且不应当解释为意思是“A中的至少一者、B中的至少一者和C中的至少一者”。
在附图中,如由箭头状物所示的箭头的方向通常演示了图解关注的信息流(诸如数据或指令)。例如,当元件A和元件B交换各种信息,但从元件A传输到元件B的信息与图解有关时,箭头可以从元件A指向元件B。该单向箭头并不意味着没有其他信息从元件B传输到元件A。此外,对于从元件A发送到元件B的信息,元件B可以将对信息的请求或接收确认发送到元件A。
在包括以下定义的本申请中,术语“模块”或术语“控制器”可以被术语“电路”替换。术语“模块”可以指的是如下,为如下的一部分或包括如下:专用集成电路(ASIC);数字、模拟或混合的模拟/数字离散电路;数字、模拟或混合模拟/数字集成电路;组合逻辑电路;现场可编程门阵列(FPGA);执行代码的处理器电路(共享、专用或组);存储由处理器电路执行的代码的存储电路(共享、专用或组);提供所述功能的其他合适的硬件部件;或上述的某些或全部的组合,诸如在芯片系统(system-on-chip)中。
模块可以包括一个或多个接口电路。在一些示例中,接口电路可以包括连接到局域网(LAN)、互联网、广域网(WAN)或其组合的有线或无线接口。本公开的任何给定模块的功能可以在经由接口电路连接的多个模块之间分配。例如,多个模块可以允许负载平衡。在又一示例中,服务器(也称为远程或云端)模块可以代表客户端模块完成某些功能。
如上文中所使用的术语“代码”可以包括软件、固件和/或微码,且可以指程序、例程、函数、类、数据结构和/或对象。术语“共享处理器电路”包含执行来自多个模块中的一些或者所有代码的单个处理器电路。术语“组处理器电路”包含这种处理器电路,其与额外的处理器电路组合,执行来自一个或多个模块的一些或者所有代码。对多个处理器电路的参考包括在分立管芯上的多个处理器电路、单个管芯上的多个处理器电路、单个处理器电路的多个核、单个处理器电路的多个线程或上述的组合。术语“共享存储电路”包含存储来自多个模块的一些或者所有代码的单个存储电路。术语“组存储电路”包含一种存储电路,该存储电路与额外存储器组合,存储来自一个或多个模块的部分或所有代码。
术语“存储电路”是术语“计算机可读介质”的子集。如在本文中使用的,术语“计算机可读介质”不包含通过介质传播(诸如在载波上)的瞬态电信号或电磁信号;术语“计算机可读介质”可以因此被认为是有形和非瞬态的。非瞬态有形计算机可读介质的非限制性示例是非易失性存储电路(例如闪存电路,可擦除可编程只读存储电路或掩码只读存储电路)、易失性存储电路(诸如,静态随机存取存储电路或动态随机存取存储电路)、磁存储介质(诸如,模拟或数字磁带或硬盘驱动器)和光存储介质(诸如,CD、DVD或蓝光光盘)。
在本申请中描述的设备和方法可以通过专用计算机部分或者完全实施,通过将通用计算机配置成执行在计算机程序中实现的一个或多个具体功能来产生专用计算机。上述功能框、流程图部件和其他元件用作软件规范,其能够通过技术人员或程序员的例行工作转化成计算机程序。
计算机程序包括处理器可执行指令,该处理器可执行指令存储在至少一种非瞬态有形计算机可读介质上。计算机程序还可以包括或依靠存储的数据。计算机程序可以包含与专用计算机的硬件交互的基本输入/输出系统(BIOS)、与专用计算机的具体装置交互的装置驱动器、一个或多个操作系统、用户应用程序、后台服务、后台应用程序等。
计算机程序可以包括:(i)要解析的描述性文本,诸如HTML(超文本标记语言)、XML(可扩展标记语言)或JSON(JavaScript对象表示法)(ii)汇编代码、(iii)通过编译器从源代码生成的目标代码、(iv)用于由编译器执行的源代码、(v)用于通过即时编译器等编译和执行的源代码。仅作为示例,源代码可以使用来自包括下列语言的句法编写:C、C++、C#、对象C、Swift、Haskell、Go、SQL、R、Lisp、Java®、Fortran、Perl、Pascal、Curl、OCaml、Javascript®、HTML5(超文本标记语言第五版)、Ada、ASP(动态服务器页面)、PHP(PHP:超文本预处理器)、Scala、Eiffel、Smalltalk、Erlang、Ruby、Flash®、Visual Basic®、Lua、MATLAB、SIMULINK和Python®。
- 电容器辅助的电池模块和系统
- 基于锂离子超级电容器辅助动力系统的电容器模组