可编程点阵磁场控制系统
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及机器人技术领域,尤其涉及一种可编程点阵磁场控制系统。
背景技术
微型机器人是指尺寸微小的、可进行微小操作的机器人,在航天,医疗,军事等方面有着广泛应用。微型机器人驱动的方式种类很多,如气动,智能材料驱动,微电机驱动和能量场驱动等。在能量场驱动方式中,磁场驱动比较灵活,利用变化磁场改变方向和移动速度,只需要对控制器进行操作就可以控制磁场力的变化,达到驱动微型机器人的目的。
现有的磁场驱动方式中产生的磁场分布区域和方位是相对固定不变的,系统对磁场变化的调控能力较弱,而且不能精确调控磁场的空间分布,对微型机器人的控制能力较弱。
上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
发明内容
本发明的主要目的在于提供一种可编程点阵磁场控制系统,旨在解决现有的磁场驱动对微型机器人控制能力较弱的技术问题。
为实现上述目的,本发明提供了一种可编程点阵磁场控制系统,所述可编程点阵磁场控制系统包括远控单元、主控单元、驱动单元及磁控单元,所述磁控单元包括多个磁芯线圈;其中
所述远控单元,用于获取控制指令,将所述控制指令转化为磁场控制文件;
所述主控单元,用于将所述磁场控制文件转换为数字开关控制信号;
所述驱动单元,用于根据所述数字开关控制信号,生成磁芯线圈的电流控制信号,以控制磁芯线圈中的电流通断状态;
所述磁控单元,用于根据电流控制信号控制磁芯线圈生成的合成磁场,以驱动磁控机器人在磁控台上的运动轨迹。
优选地,所述远控单元设定磁控机器人的运动轨迹数据,将运动轨迹数据编码为基于时序的点阵磁场开关状态控制的数据帧,生成控制点阵磁场状态的磁场控制文件。
优选地,所述主控单元接收磁场控制文件,并将其转化为点阵磁场开关状态控制的数据帧,将其解码转为点阵磁场开关状态数据,将点阵磁场开关状态转变为多通道并行数字开关控制信号。
优选地,所述磁控单元包括多个磁芯线圈,所述磁芯线圈按照点阵方式垂直摆放在预设区域中。
优选地,所述驱动单元包括多个驱动电路,所述驱动电路分别与所述主控单元和磁芯线圈连接,驱动电路接收电流控制信号以驱动所述磁芯线圈。
优选地,所述主控单元获取预设的点阵磁场开关状态数据,将点阵磁场开关状态转变为多通道并行数字开关控制信号;所述驱动单元根据所述数字开关控制信号,生成磁芯线圈的电流控制信号,以控制磁芯线圈中的电流通断状态;所述磁控单元根据电流控制信号控制磁芯线圈生成的合成磁场,以驱动磁控机器人在磁控台上的运动轨迹。
优选地,所述驱动电路包括驱动芯片、第一插座、第二插座及线圈电流驱动单元;所述驱动芯片与所述第一插座、第二插座分别连接,所述第二插座还与所述线圈电流驱动单元连接。
优选地,所述数字开关信号驱动芯片采用型号为74HC595。
优选地,所述线圈电流驱动单元包括场效应管、三极管、第一偏置电阻、第二偏置电阻、上拉电阻、限流电阻及电容;其中
所述第一偏置电阻的第一端与所述第二插座连接,所述第一偏置电阻的第二端与所述三极管的基极连接;所述第二偏置电阻的第一端与所述三极管的基极连接,所述第二偏置电阻的第二端接地;所述三极管的发射极接地,所述三极管的集电极与所述场效应管的栅极连接;所述上拉电阻的第一端与直流电源连接,所述上拉电阻的第二端与所述场效应管的栅极连接;所述电容的第一端与所述直流电源连接,所述电容的第二端与所述场效应管的栅极连接;所述限流电阻的第一端与磁芯线圈连接,所述限流电阻的第二端与所述场效应管的漏极连接,所述场效应管的源极接地。
本发明提供了一种可编程点阵磁场控制系统,该可编程点阵磁场控制系统包括远控单元、主控单元、驱动单元及磁控单元,所述磁控单元包括多个磁芯线圈。其中远控单元获取控制指令,将所述控制指令转化为磁场控制文件,主控单元将所述磁场控制文件转换为数字开关控制信号,驱动单元根据所述数字开关控制信号,生成磁芯线圈的电流控制信号,以控制磁芯线圈中的电流通断状态,磁控单元根据电流控制信号控制磁芯线圈生成的合成磁场,以驱动磁控机器人在磁控台上的运动轨迹。本发明技术方案能够根据控制指令生成磁芯线圈的电路控制信号,进而控制磁芯线圈生成的可调节的合成磁场,从而可以控制微型机器人的运动轨迹,提升了对微型机器人控制能力。
附图说明
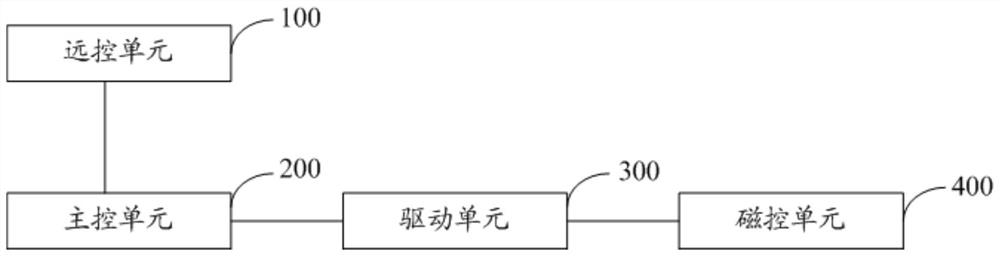
图1为本发明可编程点阵磁场控制系统一实施例的模块示意图;
图2为磁控单元中磁芯线圈一实施例的结构图;
图3为磁控单元中磁芯线圈一实施例的示意图;
图4为线圈电流驱动单元一实施例的结构图;
图5为驱动电路中数字驱动部分示意图。
本发明目的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后……)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
另外,在本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括
至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当人认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
本发明提出一种可编程点阵磁场控制系统。
参照图1,本发明中所述可编程点阵磁场控制系统包括所述可编程点阵磁场控制系统包括远控单元100、主控单元200、驱动单元300及磁控单元400,所述磁控单元400包括多个磁芯线圈。
所述远控单元100,用于获取控制指令,将所述控制指令转化为磁场控制文件。需要说明的是,本实施例中,远程控制单元可以是预装有相关程序的PC端、平板电脑等、移动终端等。通过编程的方式将微型机器人的运动轨迹、模式等参数写入,远程控制单元获取该程序,即控制指令。
所述主控单元200,用于将所述磁场控制文件转换为数字开关控制信号。主控单元200可以是下位机,主控单元200建立与远控单元100的通讯,接收磁场控制文件。主控单元200与远控单元100之间可以是无线或者有线通讯,在此不做限制。
所述驱动单元300,用于根据所述数字开关控制信号,生成磁芯线圈的电流控制信号,以控制磁芯线圈中的电流通断状态。
所述磁控单元400,用于根据电流控制信号控制磁芯线圈生成的合成磁场,以驱动磁控机器人在磁控台上的运动轨迹。本实施例中,磁控单元400包括有N*N点阵的磁芯线圈,其中N为大于2的正整数。驱动单元300通过对这些磁芯线圈进行驱动,从而可以控制磁芯线圈生成的合成磁场。
本发明提供了一种可编程点阵磁场控制系统,该可编程点阵磁场控制系统包括远控单元100、主控单元200、驱动单元300及磁控单元400,所述磁控单元400包括多个磁芯线圈。其中远控单元100获取控制指令,将所述控制指令转化为磁场控制文件,主控单元200将所述磁场控制文件转换为数字开关控制信号,驱动单元300根据所述数字开关控制信号,生成磁芯线圈的电流控制信号,以控制磁芯线圈中的电流通断状态,磁控单元400根据电流控制信号控制磁芯线圈生成的合成磁场,以驱动磁控机器人在磁控台上的运动轨迹。本发明技术方案能够根据控制指令生成磁芯线圈的电路控制信号,进而控制磁芯线圈生成的可调节的合成磁场,从而可以控制微型机器人的运动轨迹,提升了对微型机器人控制能力。
进一步地,所述远控单元100设定磁控机器人的运动轨迹数据,将运动轨迹数据编码为基于时序的点阵磁场开关状态控制的数据帧,生成控制点阵磁场状态的磁场控制文件。
需要说明的是,远控单元100具体工作过程为:
1、初始化微型机器人模型参数,设置微型机器人的数量、控制点数、初始位置等模型参数;
2、初始化磁控单元400的工作台面的范围,确定磁场点阵的数量为64;
3、在磁控单元400的虚拟工作台面中分别绘制或设置每个机器人的运动轨迹和运动时长;
4、设置微型机器人运行总时长、运行帧数、运行模式(是否多次循环运行);
5、在虚拟的工作台面中预览模拟磁控机器人运行状况,如果正常继续后面流程,反之重新设置上述参数;
6、依据运行帧数进行时序划分,确定初始时刻微型机器人在工作台面的位置区域,将该位置区域包含的点阵进行状态标记为1,其它点阵的状态标记为0。按照点阵编号从左至右,对其状态标记值进行二进制组合编码,得到一个64位二进制串,对应8字节的状态编码数据;此外附加延时数据构成点阵磁场数据帧。
7、依照上述步骤,确定其它时刻的点阵磁场状态控制帧数据,直到完成所有时序点对应的数据帧;将各数据帧按照一定格式形成点阵磁场状态的磁场控制文件。
8、通过Internet网络连接主控端,建立两者通讯连接,将磁场控制文件发送给主控单元200。
具体地,所述主控单元200接收磁场控制文件,并将其转化为点阵磁场开关状态控制的数据帧,将其解码转为点阵磁场开关状态数据,将点阵磁场开关状态转变为多通道并行数字开关控制信号。
主控单元200的软件系统包括Linux操作系统及硬件驱动程序、点阵磁场控制程序。其中,点阵磁场控制程序包括系统初始化、远程网络通讯、数据帧转化、信号输出指令等功能模块,其工作流程如下:
1、系统初始化,设置主控单元200的运行模式:远程控制、本地模式;远程控制模式则执行步骤2,否则直接执行步骤3;
2、网络通讯模块启动,接受来自远控单元100的通讯连接,接收磁场控制文件;
3、将磁场控制文件或本地预设数据文件转化为以时间序列为顺序的点阵磁场开关状态控制的数据帧;
4、读取某时刻的数据帧,将此帧数据解码为8*8点阵状态对应的64位二进制串;
5、将64位二进制串通过主板GPIO端口以串行方式依次写入驱动单元300(对应8块级联74HC595芯片)缓存;
6、调用同步输出操作指令,对应74HC595芯片的/OE输出使能控制信号有效,8块级联的74HC595芯片同时输出8路数字信号至磁控驱动电路;磁控驱动电路控制磁控台的磁场线圈工作状态,产生点阵磁场;
7、系统延时一段时间,重复步骤4,直到所有数据帧执行完毕;
参考图2,进一步地,所述磁控单元400包括多个磁芯线圈,所述磁芯线圈按照点阵方式垂直摆放在预设区域中。
磁控单元400中按照点阵方式摆放多个磁芯线圈构成点阵线圈,通过磁控驱动电路连接点阵线圈,在外部点阵数字开关信号的控制下改变点阵线圈的电流导通状态,从而产生可变化的点阵磁场。
参照图3,一个磁控单元400模块由16个磁芯线圈按照4X 4点阵方式垂直摆放在一个区域内,磁芯顶端上面覆盖保护层构成正方形工作面。其中,磁芯采用圆柱形铁氧体,相关参数为:直径D=5mm,高度H=50mm,磁芯间距5mm,线圈直径0.1mm,匝数N=45。
一个基本工作单元模块的工作面覆盖范围约40mmX40mm,在实际使用中单个基本工作单元模块的工作范围较小,不能满足应用要求,需要组合多个基本工作单元模块,扩展磁控台的工作范围。将4个磁控单元模块拼接组合,点阵线圈的规模可以扩展到8*8,相应地,将磁控单元400的工作面的范围扩大为80mm*80mm。根据实际需要,可以将多个基本工作单元模块进行拼接组合,扩展磁控单元400的磁控台工作面的范围。
进一步地,所述驱动单元300包括多个驱动电路,所述驱动电路分别与所述主控单元200和磁芯线圈连接,驱动电路接收电流控制信号以驱动所述磁芯线圈。
进一步地,所述主控单元200获取预设的点阵磁场开关状态数据,将点阵磁场开关状态转变为多通道并行数字开关控制信号;所述驱动单元300根据所述数字开关控制信号,生成磁芯线圈的电流控制信号,以控制磁芯线圈中的电流通断状态;所述磁控单元400根据电流控制信号控制磁芯线圈生成的合成磁场,以驱动磁控机器人在磁控台上的运动轨迹。
参考图4及图5,具体地,所述驱动电路包括驱动芯片U-1、第一插座J1、第二插座J2及线圈电流驱动单元300;所述驱动芯片U-1与所述第一插座J1、第二插座J2分别连接,所述第二插座J2还与所述线圈电流驱动单元连接。本实施例中,所述驱动芯片采用型号为74HC595。本实施例中,驱动芯片U-1上还级联有驱动芯片U-2,通过两个芯片级联,可以同时驱动16路磁芯线圈。其中J1包括端子VCC、GND、SCK、DAT、RCK、CLR及OE。
具体地,所述线圈电流驱动单元包括场效应管Q1、三极管Q2、第一偏置电阻R1、第二偏置电阻R2、上拉电阻R3、限流电阻R4及电容C1;其中
所述第一偏置电阻R1的第一端与所述第二插座J2连接,所述第一偏置电阻R1的第二端与所述三极管Q2的基极连接;所述第二偏置电阻R2的第一端与所述三极管Q2的基极连接,所述第二偏置电阻R2的第二端接地;所述三极管Q2的发射极接地,所述三极管Q2的集电极与所述场效应管Q1的栅极连接;所述上拉电阻R3的第一端与直流电源连接,所述上拉电阻R3的第二端与所述场效应管Q1的栅极连接;所述电容C1的第一端与所述直流电源VDD连接,所述电容C1的第二端与所述场效应管Q2的栅极连接;所述限流电阻R4的第一端与磁芯线圈Header连接,所述限流电阻R4的第二端与所述场效应管Q1的漏极连接,所述场效应管Q1的源极接地。
当三极管Q2的信号输入端的数字开关输入信号S为高电平时,Q1栅极是低电平,Q1场效应管导通,点线圈中有电流通过,磁芯产生磁场;反之,S为低电平时Q1截止,点线圈没有电流通过,不能产生磁场。
本实施例中,数字信号驱动电路由2片74HC595芯片级联而成,通过树莓派主板一个GPIO口的将点阵磁场状态控制帧中的16Bit二进制数据以串行方式输出至2片74HC595的8位锁存器中锁存,在输出使能/OE指令的控制下将锁存的16Bit数据当作16路控制信号,同步并行输出至线圈电流驱动单元的信号输入端,进一步由线圈电流驱动单元控制磁控台各点阵线圈的电流通断状态,最终控制磁控台工作面内的点阵磁场分布。
由此,一个磁控单元400模块由16个磁芯线圈的驱动电路由16路数字信号控制,它们可以由2块74HC595芯片级联可以产生。依此类推,对于8*8点阵线圈需要64路控制信号,可以由8块74HC595芯片级联产生。
磁控微型机器人是基于软铁或铁氧体材料构成的小型移动体,放置于磁控台的工作台平面上,在点阵磁场的产生磁场力作用下,按照预先程序设计的合成磁场的路径在一定区域范围内移动。磁控微型机器人的制作过程和应用场景,本实施案例不作明确的限定和说明。
本发明技术方案通过远程编程方式设计磁控机器人的运动轨迹,并将控制数据发送磁控单元执行,操控一个磁控机器人在一定区域范围内按照预设的路径运动。这种系统可以应用于医疗行业中无缆磁场驱动的微型机器人的人体胃肠道检测;工业上可以用于复杂管道检测和零件探伤等。该系统可以同时驱动多个磁控机器人运动,各个机器人的运动可以相互独立、互不影响,也可以相互协调、同时运动。因而本系统装置可以应用于需要多机器人协同工作的场合。
应当理解的是,以上仅为举例说明,对本发明的技术方案并不构成任何限定,在具体应用中,本领域的技术人员可以根据需要进行设置,本发明对此不做限制。
需要说明的是,以上所描述的工作流程仅仅是示意性的,并不对本发明的保护范围构成限定,在实际应用中,本领域的技术人员可以根据实际的需要选择其中的部分或者全部来实现本实施例方案的目的,此处不做限制。
此外,需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 可编程点阵磁场控制系统
- 梯度点阵吸能结构及其可编程刚度的手性胞元、3D打印方法