可控角度的机器人被动足部及应用该被动足的机器人
文献发布时间:2023-06-19 11:13:06
技术领域
本发明属于仿人机器人技术领域,具体涉及可控角度的机器人被动足部及应用该被动足的机器人。
背景技术
双足机器人的足部是和地面直接接触的部位,故对机器人的稳定性起着至关重要的作用。类比人类的行走,机器人的足部在行走状态时也具有转动的规律性,同时需要保持一定的转动自由度。结合这些特点,在部分应用领域对机器人具有轻量化、易操控的需求背景下,被动控制的机器人足部展现出广阔的应用空间。
一般情况下,人类的踝关节可以实现三个自由度的转动,即勾脚和绷脚(俯仰)、外八字和内八字(偏航)、内外侧倾斜(滚动)。但在行走过程中,脚掌相对于腿部只有勾脚和绷脚方向的转动。基于这一特征,机器人足部的结构设计可以大大简化,本发明以被动控制为目标,提出一种通过弹簧片实现的,兼顾转动规律性和自由度的机器人足部结构。
在机器人的足部设计中,零件结构和装配复杂程度依需求和应用环境的不同而呈现出多样化的趋势。例如中国发明专利CN201720399086.9提供一种多环节柔性仿生足,腿足之间采用万向节连接,并在各方向布置弹簧以达到自动回位效果,但万向节的设计对于双足机器人的偏航转动限制能力有限,弹簧的回弹控制难以保证;中国发明专利201921091385.1提供了一种以活塞杆作为腿足连接的机器人足部,对崎岖路面的减震能力和适应性强;中国发明专利201911323449.0提供一种具有弹性扩张足弓结构的柔性机器人足部,其对人体足弓缓冲作用的动态模拟是一大亮点,但是以上两项发明结构复杂,器件繁多,无法应用于有轻量化需求的小型机器人。
上述发明专利对于机器人脚掌的俯仰摆动幅度均有严格的限制,所提供的机器人足部位置在安装后就已固定,无法实现脚掌与地面初始角度的调节。
发明内容
为了解决现有技术中存在的不足,本申请提出了可控角度的机器人被动足部及应用该被动足的机器人,能实现仿人足部的俯仰转动、自动回位以及初始角度的调节;可满足机器人小型化、轻量化的需求。
本发明所采用的技术方案如下:
可控角度的机器人被动足部,包括转动部分和非转动部分,所述转动部分与非转动部分通过弹簧片连接,从而实现保证自由度的同时对足部主体相对运动的限制及自动回位;所述转动部分包括足部主体为仿人体足弓骨骼结构;所述非转动部分包括腿足连接件、固定轴和定位齿轮;所述腿足连接件用于连接机器人腿部和足部主体;所述固定轴用于连接腿足连接件、足部主体和定位齿轮;所述定位齿轮用于调整足部主体与腿足连接件之间的角度,且定位齿轮通过弹簧片连接足部主体,实现足部主体的自动回位。
进一步,腿足连接件包括连接平面,连接平面用于与机器人腿部末端连接;连接平面相对的两个侧壁面分别向下设有固定板,两块固定板相互平行;两块固定板的末端均为平滑的半圆形,其中一块固定板上开设有主安装孔;在另一块固定板的内侧固定安装有限位柱,限位柱沿轴开设有固定轴通道,固定轴通道与主安装孔相对设置且在同一条轴线上;在限位柱所在的固定板的外侧固定装有定位齿通道。
进一步,所述足部主体包括轴承安装座、前脚掌板和后脚跟板;轴承安装座内部为轴承空间;在轴承安装座的底部位置向外延伸出承接弧,在承接弧内弧面的两端分别加工有限位切面,限位切面分别为前脚侧限位切面和后脚侧限位切面,利用两个限位切面限制足部主体旋转到前脚或者后脚处的极限位置。
进一步,所述前脚掌板和后脚跟板均包括接地部分和连接部分,所述接地部分在同一平面上;连接部分为具有一定斜度的连接板,连接板的上端分别连接在轴承空间的底部,形成仿照人体足弓骨骼结构。
进一步,在轴承安装座与前脚掌板接地部分之间、轴承安装座与后脚跟板接地部分之间分别设置第一加强筋,在脚掌板连接部分与后脚跟板连接部分之间都设置有第二加强筋。
进一步,在两块第一加强筋上对称设置有卡槽,弹簧片的一端插入卡槽且保持滑动连接,弹簧片的另一端与定位齿轮固定连接。
进一步,固定轴的一端攻有螺纹,另一端为连接部,连接部与腿足连接件之间通过紧固件固定连接;固定轴的螺纹端依次插入主安装孔、轴承内孔、固定轴通道和定位齿轮的安装孔,并通过螺母对固定轴进行锁紧,实现腿足连接件和足部主体之间的连接。
进一步,足部主体两侧的的承接弧的半径与腿足连接件下端的半圆相等;机器人足部落地时,承接弧和腿足连接件接触,用于分散部分轴承负载。
一种机器人,安装有上述可控角度的机器人被动足部。
本发明的有益效果:
在不少机器人的应用场景中,使用者对机器人具有轻量化的需求。而电机、舵机等动力设备因功能所需难以减轻,故本发明针对无需精确控制足部的机器人,设计了被动控制的足部结构,减轻重量的同时还保留了足部俯仰转动的自由度。
此外,相比于现有的部分完全平底的脚底面,本发明采用仿人类足弓设计,能够像人类足弓一样对机器人起到一定的缓冲作用,而且足弓位置的镂空结构可以降低机器人在不平整地面行走时前后脚掌同时离地悬空的概率,保证了前后脚掌能够着地,从而防止机器人偏航转动。
针对机器人抬脚状态下足部转动不稳定的问题,本发明利用同定位齿轮相连接的弹簧片对离地的足部主体进行自动回位,其初始角度位置可随定位齿轮的转动调整,齿轮的固定则由定位单齿完成。
附图说明
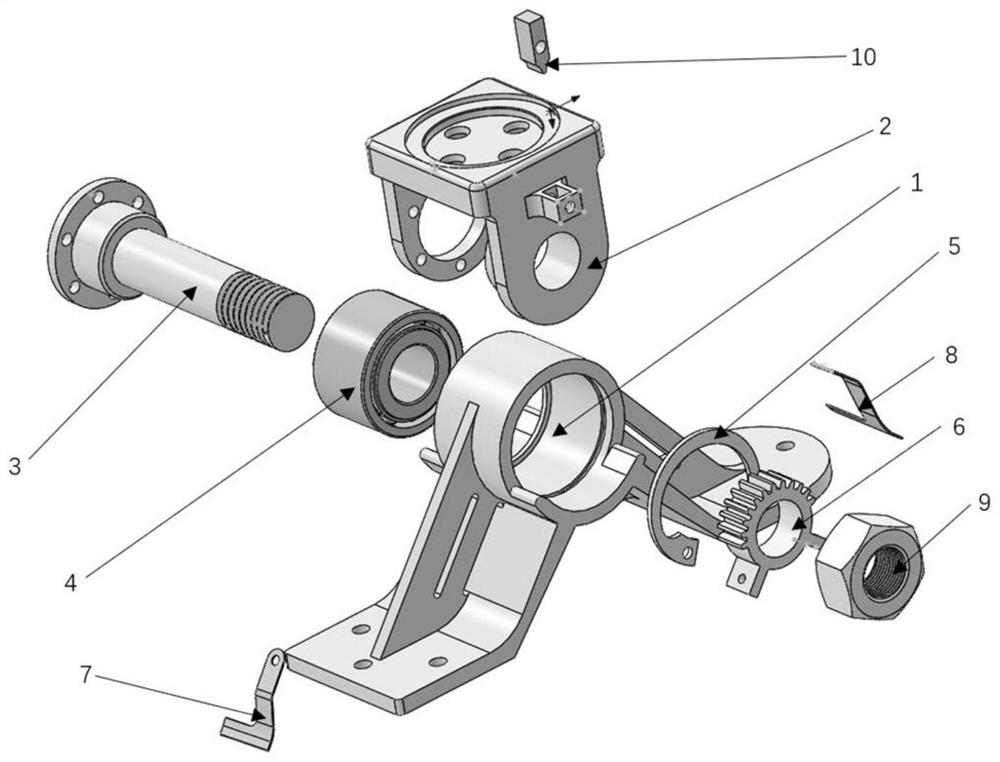
图1是本发明所设计的被动足部结构示意图;
图2是腿足连接件结构示意图;
图3是足部主体结构示意图;
图4是固定轴结构示意图;
图5是定位齿轮结构示意图;
图6是被动足部结构示意图;
图7是被动足部结构定位齿轮端示意图;
图8是被动足部结构固定轴端示意图;
图9是被动足部结构足部主体主视图;
图10是本被动足部结构发生干涉位置放大图;
图中,1、足部主体,2、腿足连接件,2-1、主安装孔,2-2、小安装孔,2-3、固定轴通道,2-4、限位柱,2-5、定位齿通道,2-6、连接平面,2-7、固定板,3、固定轴,3-1、前脚掌板,3-2、后脚跟板,3-3、第一加强筋,3-4挡圈槽,3-5、轴承空间,3-6、滑槽,3-7、限位切面,3-8、卡槽,3-9、第二加强筋,3-10、承接弧4、轴承,4-1、螺纹,4-2、轴颈,4-3、连接部,4-4、安装孔,5、挡圈,6、定位齿轮,6-1、弹簧片安装孔,7、后弹簧片,8、前弹簧片,9、螺母,10、定位齿,11、压力传感器,12、螺钉。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。
如图1所示的可控角度的机器人被动足部,包括转动部分和非转动部分,且所述转动部分与非转动部分通过弹簧片连接,从而实现保证自由度的同时对足部主体相对运动的限制及自动回位;所述转动部分包括足部主体1为仿人体足弓骨骼结构;所述非转动部分包括腿足连接件2、固定轴3和定位齿轮6;所述腿足连接件2用于连接机器人腿部和足部主体1;所述固定轴3用于连接腿足连接件2、足部主体1和定位齿轮6;所述定位齿轮6用于调整足部主体1与腿足连接件2之间的角度,且定位齿轮6通过弹簧片连接足部主体1,实现足部主体1的自动回位。
更具体地,腿足连接件2用于连接机器人腿部和足部主体1;如图2所示的腿足连接件2呈拱形,腿足连接件2包括连接平面2-6,连接平面2-6用于与机器人腿部末端连接,例如在连接平面2-6上设置连接孔,通过与连接件配合实现腿足连接件2与机器人腿部的连接,如图6所示是与压力传感器11连接,具体采用的连接方式可以根据实际情况进行调整,不仅限于上述连接方式。连接平面2-6相对的两个侧壁面分别向下设有固定板2-7,两块固定板2-7相互平行;两块固定板2-7的末端均为平滑的半圆形,其中一块固定板2-7上开设有主安装孔2-1,沿主安装孔2-1的周向阵列开设有小安装孔2-2;在另一块固定板2-7的内侧固定安装有限位柱2-4,限位柱2-4沿轴开设有固定轴通道2-3,固定轴通道2-3与主安装孔2-1相对设置且在同一条轴线上;在限位柱2-4所在的固定板2-7的外侧固定装有定位齿通道2-5。
如图3所示的足部主体1包括轴承安装座、前脚掌板3-1和后脚跟板3-2;轴承安装座为水平设置的环形结构,轴承安装座内部为轴承空间3-5,用于安装轴承4。安装方法及连接关系:连接件按实际需要同腿部固定,和腿部之间无相对运动。在轴承安装座内设有挡圈槽3-4,在挡圈槽3-4内放置挡圈5(或者卡簧),挡圈5放入挡圈槽3-4固定。在轴承安装座的底部位置向外延伸出承接弧3-10,承接弧3-10为非对称设置,承接弧3-10靠近后脚侧要高于靠近前脚侧。在承接弧3-10内弧面的两端分别加工有限位切面3-7;如图3所示限位切面3-7分别为前脚侧限位切面和后脚侧限位切面。过承接弧3-10圆心位置作水平线,过该圆心分别向前脚侧限位切面和后脚侧限位切面底处的边沿连线;前脚侧限位切面底处的边沿连线与水平线之间的夹角为勾角极限角度a
前脚掌板3-1的接地部分为半圆形,后脚跟板3-2的接地部分为矩形,且前脚掌板3-1的接地部分面积比后脚跟板3-2的接地部分的面积大,且前脚掌板3-1和后脚跟板3-2的接地部分在同一平面上。前脚掌板3-1和后脚跟板3-2的连接部分为具有一定斜度的连接板,连接板的上端分别连接在轴承空间3-5的底部,形成仿照人体足弓骨骼结构。为了保证整体结构的强度,在轴承安装座与前脚掌板3-1接地部分之间、轴承安装座与后脚跟板3-2接地部分之间分别设置第一加强筋3-3,在脚掌板3-1连接部分与后脚跟板3-2连接部分之间都设置有第二加强筋3-9。如图7所示,两块第一加强筋3-3上对称设置有滑槽3-6和卡槽3-8,同一块第一加强筋3-3上的滑槽3-6和卡槽3-8之间平行设置;且卡槽3-8贴在连接板上。
通过固定轴3实现腿足连接件2和足部主体1之间的连接;如图4所示固定轴3为阶梯轴,固定轴3的一端攻有螺纹,另一端为连接部4-3,在连接部4-3上沿周向布置有安装孔4-4;安装孔4-4与腿足连接件2的小安装孔2-2一一对应如图8所示。
在组装时,将轴承4装入轴承安装座的轴承空间3-5内,再将腿足连接件2卡装在轴承安装座外部,腿足连接件2的两块固定板2-7的底部分别与轴承安装座两侧承接弧3-10相接触或留有一定间隙;机器人足部落地时,承接弧和腿足连接件2接触,用于分散部分轴承负载。此时,固定板2-7的主安装孔2-1、轴承4内孔、限位柱2-4的固定轴通道2-3均在同一轴线上;将固定轴3从主安装孔2-1侧依次插入,轴承内圈和固定轴3的轴颈配合,此时固定轴3轴颈的螺纹部分和一段无螺纹部分从腿足连接件2伸出;连接部4-3的安装孔4-4与小安装孔2-2一一对应并通过连接件固定连接。将定位齿轮6套装在固定轴3伸出部分上,并用螺母9对固定轴3进行锁紧,使得定位齿轮6与设有限位柱2-4的固定板2-7外侧贴合。
定位齿轮6如图5所示为半齿轮,且在定位齿轮6的两侧设有连接座,连接座上开设有弹簧片安装孔6-1。定位齿轮6两侧的连接座分别连接后弹簧片7和前弹簧片8;前弹簧片8的一端通过紧固件(螺钉螺母)与前脚侧的弹簧片安装孔6-1连接,前弹簧片8的另一端插入前脚掌板3-1上第一加强筋3-3的卡槽3-8内,且在卡槽3-8滑动连接;同理,后弹簧片7的一端通过紧固件与后脚侧的弹簧片安装孔6-1连接,后弹簧片7的另一端插入后脚跟板3-2上第一加强筋3-3的卡槽3-8内,且在卡槽3-8滑动连接。此时,足部主体1和腿足连接件2之间的初始角度调整可通过旋转定位齿轮6来实现。确定足部主体1和腿足连接件2之间的初始角度后,从腿足连接件2上的定位齿通道2-5插入定位齿10;定位齿通道2-5上设有螺纹孔,向定位齿通道2-5的螺纹孔内旋入螺丝固定,防止定位齿10上下运动。
工作机制:初始时,松开螺母9,取出定位齿10,足部主体1、后弹簧片7、前弹簧片8以及定位齿轮6可同步绕固定轴3转动,从而调整足部主体1与腿足连接件2之间的初始角度。找到合适角度后,在定位齿通道2-5向下插入定位齿10,并用螺钉12固定定位齿10,通过定位齿10固定定位齿轮6的位置,拧紧螺母9,即完成初始状态设定。
机器人工作时,腿足连接件2、固定轴3、定位齿轮6之间无相对运动,足部主体1和轴承4外圈能够绕固定轴3的轴线旋转,但受到连接定位齿轮6和足部主体1之间的弹簧片(7、8)的限制;足部主体1受外力或惯性力影响,偏离其初始位置时,前(或后)弹簧片(7或8)发生形变,故只要整个装置在悬空状态(不受外力),前(或后)弹簧片(7或8)可使足部主体1自动回位。如图9和10所示,依据机器人实际应用环境确定足部主体1在俯仰方向的极限角度a1和a2,由此确定足部主体1上限位切面3-7和竖直、水平方向的夹角。足部主体1旋转到正负方向的极限位置时,限位切面3-7正好贴合连接件2脚的侧面,发生干涉,阻止足部主体继续运动。本发明所提供的机器人被动足部结构,充分利用摩擦力,防止自动回位时因弹簧片造成的振动。如示意图所示,足部主体在旋转过程中,弹簧片(7、8)和滑槽、斜面之间形成摩擦,可等效为弹簧片回弹的阻尼力,从而防止振动的发生。
同时本申请还设计了一种机器人,安装有本发明所设计的可控角度的机器人被动足部。
以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
- 可控角度的机器人被动足部及应用该被动足的机器人
- 可控角度的机器人被动足部及应用该被动足的机器人