基于ABC-A*算法的3D打印路径规划方法
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉及3D打印领域,特别设计基于ABC-A*算法的3D打印路径规划方法。
背景技术
从2011年开始,全球开始掀起3D打印热潮,当前,3D打印在航空航天、汽车、医疗健康等领域的市场应用已经取得积极的进展,我国3D打印产业发展至今,呈现出不断深化、不断扩大应用的态势。3D打印过程需要对切片后的每层进行路径规划工作,零件打印速度、打印效率、表面质量都与扫描路径规划有关。路径规划工作可以分为轮廓路径和填充路径两种。轮廓路径规划就是将每个封闭曲线按一定的顺序连接起来,得到最佳路径的过程。填充路径规划就是按一定规律生成扫描线段,形成封闭轮廓间封闭区域,并依次填充的过程。正确有效地规划零件横截面视图的路径对打印质量具有重要的意义。
发明内容
为了解决上述存在问题。本发明提出一种基于ABC-A*算法的3D打印路径规划方法。为达此目的:
本发明提出基于ABC-A*算法的3D打印路径规划方法,其特征在于:
步骤1:设一个优先队列L,初始放入起点;
步骤2:初始化各个参数,蜂群总数N、食物源被采集次数即最大迭代次数M及控制参数LM,确定问题搜索范围,并且在搜索范围内随机产生初始解x
步骤3:计算初始解的适应度;
步骤4:引领蜂对解x
步骤5:贪婪选择;
步骤6:计算食物源的概率P
步骤7:跟随蜂依照概率P
步骤8:贪婪选择;
步骤9:侦察蜂替换;
步骤10:判断是否满足循环终止条件,若满足,循环结束,输出最优解H(x),否则返回步骤4继续搜索;
步骤11:计算估价函数Fg;
步骤12:每次从Q中取出Fg值最小的点,进行增广;
步骤13:再算出走到的点的Fg值,加入Q中。
作为本发明进一步改进,所述步骤4中新解及适应度计算表示为:
v
其中,式中,k=1,2,...,N,j=1,2,...,D,且k≠i,Ψ
作为本发明进一步改进,所述步骤5贪婪选择表达为:
其中,x
作为本发明进一步改进,所述步骤6食物源概率计算公式为:
其中,N表示蜂群总数。
作为本发明进一步改进,所述步骤7中新解和适应度计算公式为:
v
其中,式中,k=1,2,...,N,j=1,2,...,D,且k≠i。
作为本发明进一步改进,所述步骤8中贪婪选择公式和步骤5中一致为。
作为本发明进一步改进,所述步骤9中侦察蜂替换公式为:
x
其中,Ф为0~1间的随机数,x
作为本发明进一步改进,所述步骤10中最优解输出公式为:
H(x
其中,x
作为本发明进一步改进,所述步骤11中估价函数计算公式为:
Fg(x)=G(x)+H(x) (10)
其中,其中G(x)为起点到x点已移动的实际距离。
本发明基于ABC-A*算法的3D打印路径规划方法,有益效果在于:
1.本发明利用ABC算法,优化了A*算法。
2.本发明利用ABC-A*算法,提高3D打印成型的速度和质量。
3.本发明算法复杂度低,实时性强。
4.本发明硬件系统实现简单,成本低。
附图说明
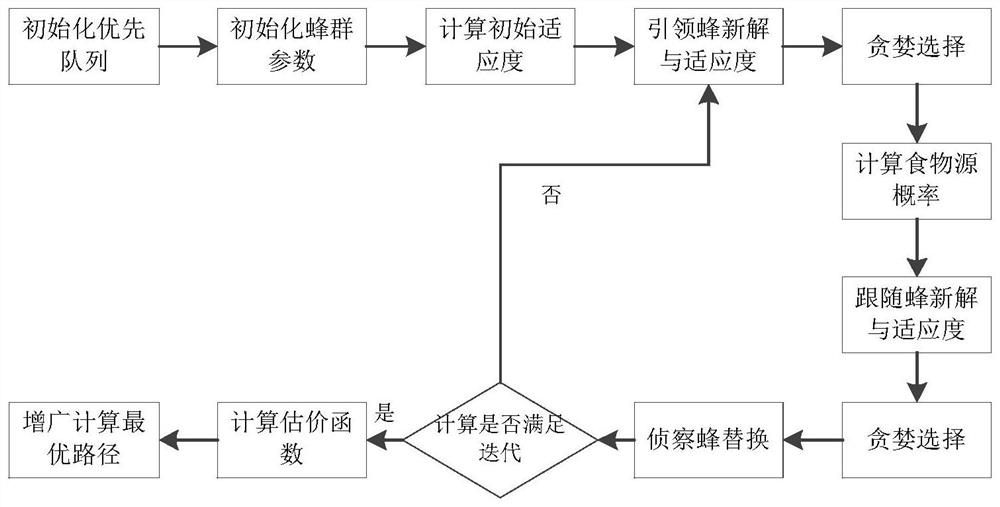
图1系统流程图;
具体实施方式
本发明提出一种基于ABC-A*算法的3D打印路径规划方法,具体步骤如下,其特征在于:
下面结合附图与具体实施方式对本发明进一步描述:
如图1所示,首先,设一个优先队列L,初始放入起点,初始化各个参数,蜂群总数N、食物源被采集次数即最大迭代次数M及控制参数LM,确定问题搜索范围,并且在搜索范围内随机产生初始解x
新解及适应度计算表示为:
v
其中,式中,k=1,2,...,N,j=1,2,...,D,且k≠i,Ψ
接着,对种群贪婪选择,计算食物源的概率P
贪婪选择表达为:
其中,x
食物源概率计算公式为:
其中,N表示蜂群总数。
新解和适应度计算公式为:
v
其中,式中,k=1,2,...,N,j=1,2,...,D,且k≠i。
此外,再一次,贪婪选择,并对侦察蜂替换,判断是否满足循环终止条件,若满足,循环结束,输出最优解H(x),继续搜索。
侦察蜂替换公式为:
x
其中,Ф为0~1间的随机数,x
最优解输出公式为:
H(x
其中,x
最后,计算估价函数Fg,每次从Q中取出Fg值最小的点,进行增广再算出走到的点的Fg值,加入Q中。
估价函数计算公式为:
Fg(x)=G(x)+H(x) (10)
其中,其中G(x)为起点到x点已移动的实际距离。
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
- 基于ABC-A*算法的3D打印路径规划方法
- 一种基于蚁群算法和遗传算法融合的配送中心拣货路径规划方法