一种超声波传感器及侦测方法
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及一种超声波传感器及侦测方法。
背景技术
超声波传感器广泛运用于汽车、无人机、无人车、机器人等各类交通工具及工业、电子设备等上。因为超声波自身传播速度(340米/秒)的限制,超声波传感器的侦测反应速度受到很大的影响。
为了提高超声波传感器的侦测反应速度,本发明人在已申请发明CN105549022A中提出一解决方案:单个超声波传感器集成多个不同频率规格传声器(也称换能器),按一定的时序工作,大幅缩减传感器的侦测反应周期,以大幅提高传感器的侦测反应速度。
但专利CN105549022A的技术方案中,传感器的各传声器皆采用不同的工作频率(或称频点,如40K、58K等,单位:赫兹),及方案本身所采用的侦测方法较为单一,因此CN105549022A方案传感器也如传统单传声器传感器一样存在盲区,该盲区通常为15厘米至45厘米。
发明内容
针对现有技术存在的问题,本发明的目的在于提供一种侦测反应速度快、侦测盲区小的超声波传感器,本发明的另一目的是提供一种实施上述超声波传感器的侦测方法。
为实现上述目的,本发明一种超声波传感器,包括两个或两个以上的传声器:传声器1、传声器2、……、传声器n,n≥2,其分别具有不同的主工作频率K1、K2、……、Kn,各个传声器均为集发射与接收功能为一体的传声器;
其中,至少一个传声器设置有一个副工作频率,该副工作频率与另一个传声器的主工作频率相同,具有相同工作频率的两个传声器组合在一起形成收发传声器组,该收发传声器组中的一个传声器用于发射信号、另一个传声器用于接收回波信号;
或者,至少两个传声器具有相同的副工作频率,并且该副工作频率与各个传声器的主工作频率均不相同,具有相同副工作频率的两个传声器组合在一起形成收发传声器组,该收发传声器组中的一个传声器用于发射信号、另一个传声器用于接收回波信号。
进一步,当传感器侦测到近距离S内没有物体时,所述传声器1、传声器2、……、传声器n分别以主工作频率K1、K2、……、Kn,以均匀、相近的时间间隔轮流进行发射信号,并对回波信号进行接收。
进一步,当传感器侦测到近距离S内没有物体时,传感器侦测量程为Lf,所述传声器1、传声器2、……传声器n,单个传声器侦测周期为Tf,在侦测周期Tf内,各传声器依次进行发射;
其中,传声器1与传声器2开始发射时间间隔为Tfj1;传声器2与传声器3开始发射时间间隔为Tfj2;之后的传声器工作形式以此类推;传声器n与下一周期传声器1开始发射时间间隔为Tfjn;
Tfj1≈Tfj2≈……≈Tfjn≈Tf/n,Tfj1+Tfj2+……+Tfjn=Tf;在一个侦测周期Tf内形成n次发射信号、回波信号。
进一步,在工作时间内,所述传声器1、传声器2、……传声器n按照设定的顺序、设定的时间间隔来发射信号;传感器根据各个传声器回波信号的接收顺序与各个传声器的发射顺序的一致性,以及各个传声器回波信号的时间间隔与各个传声器的开始发射时间间隔的一致性,来判别物体的侦测结果,获得侦测距离d,并以此提高传感器的侦测反应速度。
进一步,当传感器侦测到近距离S内有物体时,所述收发传声器组中的两个传声器以共同副工作频率,以一发一收方式进行工作。
进一步,当传感器侦测到近距离S内有物体时,所述收发传声器组中的两个传声器的侦测量程由Lf缩短至S;收发传声器组中的两个传声器以共同副工作频率Kf,以一发一收方式进行工作:
收发传声器组中的第一传声器以副工作频率Kf发射信号,收发传声器组中的第二传声器不发射,第二传声器对第一传声器的回波进行接收;或者,第二传声器以副工作频率Kf发射,第一传声器不发射,第一传声器对第二传声器的回波进行接收;以减小或消除传感器的盲区,提高近距离的侦测精度;并以此提高近距离测到物体时传感器的侦测反应速度。
进一步,所述第一传声器为所述传声器1,所述第二传声器为传声器2。
进一步,当传感器侦测到近距离S内有物体时,所述传声器3、……传声器n侦测量程由Lf缩短至Lr,S<Lr<Lf;所述传声器3、……传声器n的单个传声器侦测周期由Tf缩小为Tr。
进一步,所述传声器3、……传声器n的工作过程为:
在侦测周期Tr内,传声器3、……传声器n依次进行发射;
传声器3与传声器4开始发射时间间隔为Trj1;
传声器4与传声器5开始发射时间间隔为Trj2;之后的传声器工作形式以此类推;
传声器n与下一周期传声器3开始发射时间间隔为Trj(n-2);
Trj1≈Trj2≈……≈Trj(n-2)≈Tr/(n-2),Trj1+Trj2+……+Trj(n-2)=Tr;
在一个侦测周期Tr内形成n-2次发射信号、回波信号;
在工作时间内,传声器3、传声器4、……传声器n按照设定的顺序、设定的时间间隔来发射信号;传感器根据各个传声器回波信号的接收顺序、时间间隔与各个传声器的发射顺序、开始发射时间间隔的一致性,来判别物体的侦测结果,获得侦测距离d。
一种超声波传感器侦测方法,具体为:运用上述超声波传感器进行超声波侦测的方法。
本发明超声波传感器及侦测方法,既保证了远距离具有较高的侦测反应速度,也大幅减小或消除了传感器的盲区,且近距离也具有较高的侦测反应速度,传感器具有较优异的侦测性能,便于广泛运用于汽车、无人机、无人车、安防、机器人等各类交通工具及工业、电子设备等产品上。同时,采用收发一体的传声器,在实现同样侦测性能的同时,节省了传声器的数量,降低了传感器的重量、成本,非常便利于在汽车、无人机等上的大批运用。
附图说明
图1为本发明设置四个传声器传感器结构示意图;
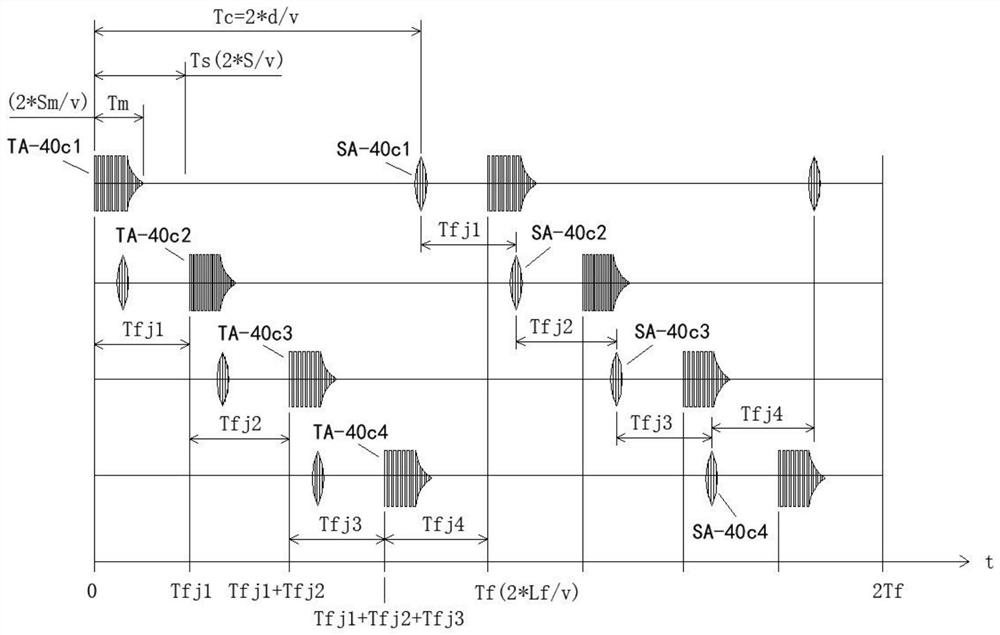
图2为本发明设置四个传声器传感器常规侦测时序示意图;
图3为本发明设置四个传声器传感器近距离A侦测时序示意图;
图4为本发明设置四个传声器传感器近距离B侦测时序示意图;
图5为本发明设置两个传声器传感器结构示意图。
具体实施方式
下面将结合附图,对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
如图1、图2、图3、图4、图5所示,本发明一种超声波传感器,包括两个或两个以上的传声器:传声器1、传声器2、……、传声器n(n≥2),其分别具有不同的主工作频率K1、K2、……、Kn。传声器1、传声器2、……、传声器n(n≥2),均为集发射与接收功能为一体的传声器。
方案一:至少一个传声器设置有一个副工作频率,该副工作频率与另一个传声器的主工作频率相同,具有相同工作频率的两个传声器组合在一起形成收发传声器组,该收发传声器组中的一个传声器用于发射信号、另一个传声器用于接收回波信号。
例如,传声器2除了具有主工作频率K2,还具有副工作频率K1,因为传声器1的主工作频率也是K1,此时,传声器1、传声器2具有共同的工作频率K1,传声器1、传声器2可以组合为收发传声器组。
方案二:至少两个传声器具有相同的副工作频率,并且该副工作频率与各个传声器的主工作频率均不相同,具有相同副工作频率的两个传声器组合在一起形成收发传声器组,该收发传声器组中的一个传声器用于发射信号、另一个传声器用于接收回波信号。
例如,传声器1、传声器2具有相同的副工作频率K0,副工作频率K0与主工作频率K1、K2均不同,此时,传声器1、传声器2可以组合为收发传声器组。
本发明中,将传声器共同的副工作频率统称为Kf。
以方案一的形式进行工作:
本实施例以传感器设有四个传声器为例,图1是本发明设置四个传声器传感器结构示意图。传感器40具有不同主工作频率的传声器40c1、传声器40c2、传声器40c3、传声器40c4,传声器40c1、传声器40c2、传声器40c3、传声器40c4主工作频率分别为K1、K2、K3、K4,设K1=40K、K2=58K、K3=48K、K4=52K。
传声器40c2除了具有主工作频率K2,还有具有副工作频率K1(即传声器40c1的主工作频率K1,40K),即传声器40c1、传声器40c2具有共同副工作频率Kf、40K,因此传声器40c1、传声器40c2可以组合为收发传声器组,以一发一收方式进行工作。
传感器上电开始工作,当传感器侦测到近距离S(S通常设为50厘米至90厘米,比各传声器的盲区值稍大)内没有物体时,四个传声器按图2的时序示意图进行侦测工作,图2为本发明设置四个传声器传感器常规侦测时序示意图。其中,传声器(传感器)的量程为Lf,单个传声器(40c1、40c2、40c3、40c4)的侦测周期皆为Tf(Tf=2*Lf/v)。
其中,TA-40c1为传声器40c1的发射信号,SA-40c1为传声器40c1的回波信号。TA-40c2为传声器40c2的发射信号,SA-40c2为传声器40c2的回波信号。TA-40c3为传声器40c3的发射信号,SA-40c3为传声器40c3的回波信号。TA-40c4为传声器40c4的发射信号,SA-40c4为传声器40c4的回波信号。
传声器40c1以40K工作频率工作,传声器40c2以58K工作频率工作,传声器40c3以48K工作频率工作,传声器40c4以52K工作频率工作,传声器40c1、传声器40c2、传声器40c3、传声器40c4以均匀、相近的时间间隔依次进行发射,传声器40c1与传声器40c2开始发射时间间隔为Tfj1,传声器40c2与传声器40c3开始发射时间间隔为Tfj2,传声器40c3与传声器40c4开始发射时间间隔为Tfj3,传声器40c4与下一周期传声器40c1开始发射时间间隔为Tfj4;Tfj1≈Tfj2≈Tfj3≈Tfj4≈Tf/4,Tfj1+Tfj2+Tfj3+Tfj4=Tf。
传声器40c1、传声器40c2、传声器40c3、传声器40c4均用于对同一物体进行侦测,因此侦测到时,传声器40c1与传声器40c2回波信号时间间隔为Tfj1,传声器40c2与传声器40c3回波信号时间间隔为Tfj2,传声器40c3与传声器40c4回波信号时间间隔为Tfj3,传声器40c4与下一周期传声器40c1回波信号时间间隔为Tfj4。
在工作时间内,传声器40c1、传声器40c2、传声器40c3、传声器40c4按照设定的顺序、设定的时间间隔来发射信号。传感器根据各个传声器回波信号的接收顺序与各个传声器的发射顺序的一致性,以及各个传声器回波信号的时间间隔与各个传声器的开始发射时间间隔的一致性,来判别物体的侦测结果,获得侦测距离d(d=v*Tc/2),d为物体与传感器的距离,Tc为回波信号与发射信号的时差。
相对于传统单个传声器的传感器工作时,在单个侦测周期内仅有一个回波信号,本发明四个传声器的传感器工作时,在单个侦测周期Tf内有四个回波信号,因此,传感器40的侦测周期缩减为1/4Tf,本发明传感器40具有较高的侦测反应速度。
当传感器上电刚工作就侦测到近距离S内有物体,或在工作过程中侦测到有物体由远至近进入S内时,传声器40c1、传声器40c2以S为量程、工作频率K1,以一发一收方式进行工作。
设:传声器40c1用于发射超声波(以Kf,40K工作频率),传声器40c2不发射超声波,传声器40c2对传声器40c1的回波进行接收。侦测方式见图3,图3为本发明设置四个传声器的传感器近距离A侦测时序示意图;可知,在近距离S范围内,当物体进入传声器40c1的侦测盲区Sm(Sm=v*Tm/2),即Tc≤Tm时(Tm为余震,为时间值),传声器40c1的回波信号SA-40c1与其发射信号TA-40c1开始重叠,此时传声器40c1不能识别回波信号SA-40c1,因此不能分辨侦测距离,产生盲区(通常为15厘米至45厘米)。但,传声器40c2因为没有进行发射,仅进行接收,因此传声器40c2可以对接收的回波信号SA-40c2进行分辨、识别,通过d=v*Tc/2,可得出Sm内传感器与物体的距离,以此减小或消除传感器40存在的侦测盲区。
同时,因为传声器40c1、传声器40c2量程S距离数值小,故侦测周期为Ts(2*S/v)也小,因此,传声器40c1、传声器40c2在近距离S内具有较高的侦测反应速度,即传感器40在近距离S内具有较高的侦测反应速度。
当传感器侦测到近距离S内有物体,与此同时,传声器40c3、传声器40c4以Lr为量程进行工作,S<Lr<Lf,侦测方式见图4,图4为本发明设置四个传声器传感器近距离B侦测时序示意图。传声器40c3、传声器40c4的侦测周期皆为Tr(2*Lr/v)。
TA-40c3为传声器40c3的发射信号,SA-40c3为传声器40c3的回波信号,TA-40c4为传声器40c4的发射信号,SA-40c4为传声器40c4的回波信号。传声器40c3以48K工作频率工作,传声器40c4以52K工作频率工作,传声器40c3、传声器40c4以均匀、相近的时间间隔依次进行发射信号。传声器40c3与传声器40c4开始发射时间间隔为Trj1,传声器40c4与下一周期传声器40c3开始发射时间间隔为Trj2,Trj1≈Trj2≈Tr/2,Trj1+Trj2=Tr。
传声器40c3与传声器40c4对同一物体进行侦测,因此侦测到时,传声器40c3与传声器40c4回波信号时间间隔为Trj1,传声器40c4与下一周期传声器40c3回波信号时间间隔为Trj2。在工作时间内,传声器40c3、传声器40c4按照设定的顺序、设定的时间间隔来发射信号。传感器根据传声器40c3、传声器40c4回波信号的接收顺序与传声器40c3、传声器40c4的发射顺序的一致性,以及传声器40c3、传声器40c4回波信号的时间间隔与传声器40c3、传声器40c4的开始发射时间间隔的一致性,来判别物体的侦测结果,获得侦测距离d。传声器40c3、传声器40c4用于对传声器40c1、传声器40c2的协同侦测工作,提高了传感器40的距离侦测精度,也提高了传感器的侦测反应速度。
以方案二的形式进行工作:
本实施例以传感器设有四个传声器为例,图1是本发明设置四个传声器传感器结构示意图。传感器40具有不同主工作频率的传声器40c1、传声器40c2、传声器40c3、传声器40c4,传声器40c1、传声器40c2、传声器40c3、传声器40c4主工作频率分别为K1、K2、K3、K4,设K1=40K、K2=58K、K3=48K、K4=52K。
传声器40c1除了具有主工作频率K1,还有具有副工作频率K0,K0=50K。传声器40c2除了具有主工作频率K2,还有具有副工作频率K0,K0=50K。即传声器40c1、传声器40c2具有共同副工作频率Kf,Kf=K0=50K,因此传声器40c1、传声器40c2可以组合为收发传声器组,以一发一收方式进行工作。
传感器上电开始工作,当传感器侦测到近距离S(S通常设为50厘米至90厘米,比各传声器的盲区值稍大)内没有物体时,四个传声器按图2的时序示意图进行侦测工作,图2为本发明设置四个传声器传感器常规侦测时序示意图。其中,传声器(传感器)的量程为Lf,单个传声器(40c1、40c2、40c3、40c4)的侦测周期皆为Tf(Tf=2*Lf/v)。
其中,TA-40c1为传声器40c1的发射信号,SA-40c1为传声器40c1的回波信号。TA-40c2为传声器40c2的发射信号,SA-40c2为传声器40c2的回波信号。TA-40c3为传声器40c3的发射信号,SA-40c3为传声器40c3的回波信号。TA-40c4为传声器40c4的发射信号,SA-40c4为传声器40c4的回波信号。
传声器40c1以40K工作频率工作,传声器40c2以58K工作频率工作,传声器40c3以48K工作频率工作,传声器40c4以52K工作频率工作,传声器40c1、传声器40c2、传声器40c3、传声器40c4以均匀、相近的时间间隔依次进行发射,传声器40c1与传声器40c2开始发射时间间隔为Tfj1,传声器40c2与传声器40c3开始发射时间间隔为Tfj2,传声器40c3与传声器40c4开始发射时间间隔为Tfj3,传声器40c4与下一周期传声器40c1开始发射时间间隔为Tfj4;Tfj1≈Tfj2≈Tfj3≈Tfj4≈Tf/4,Tfj1+Tfj2+Tfj3+Tfj4=Tf。
传声器40c1、传声器40c2、传声器40c3、传声器40c4均用于对同一物体进行侦测,因此侦测到时,传声器40c1与传声器40c2回波信号时间间隔为Tfj1,传声器40c2与传声器40c3回波信号时间间隔为Tfj2,传声器40c3与传声器40c4回波信号时间间隔为Tfj3,传声器40c4与下一周期传声器40c1回波信号时间间隔为Tfj4。
在工作时间内,传声器40c1、传声器40c2、传声器40c3、传声器40c4按照设定的顺序、设定的时间间隔来发射信号。传感器根据各个传声器回波信号的接收顺序与各个传声器的发射顺序的一致性,以及各个传声器回波信号的时间间隔与各个传声器的开始发射时间间隔的一致性,来判别物体的侦测结果,获得侦测距离d(d=v*Tc/2),d为物体与传感器的距离,Tc为回波信号与发射信号的时差。
相对于传统单个传声器的传感器工作时,在单个侦测周期内仅有一个回波信号,本发明四个传声器的传感器工作时,在单个侦测周期Tf内有四个回波信号,因此,传感器40的侦测周期缩减为1/4Tf,本发明传感器40具有较高的侦测反应速度。
当传感器上电刚工作就侦测到近距离S内有物体,或在工作过程中侦测到有物体由远至近进入S内时,传声器40c1、传声器40c2以S为量程、副工作频率K0,以一发一收方式进行工作。
设:传声器40c1用于发射超声波(以K0,50K工作频率),传声器40c2不发射超声波,传声器40c2对传声器40c1的回波进行接收。侦测方式见图3,图3为本发明设置四个传声器的传感器近距离A侦测时序示意图;可知,在近距离S范围内,当物体进入传声器40c1的侦测盲区Sm(Sm=v*Tm/2),即Tc≤Tm时(Tm为余震,为时间值),传声器40c1的回波信号SA-40c1与其发射信号TA-40c1开始重叠,此时传声器40c1不能识别回波信号SA-40c1,因此不能分辨侦测距离,产生盲区(通常为15厘米至45厘米)。但,传声器40c2因为没有进行发射,仅进行接收,因此传声器40c2可以对接收的回波信号SA-40c2进行分辨、识别,通过d=v*Tc/2,可得出Sm内传感器与物体的距离,以此减小或消除传感器40存在的侦测盲区。
同时,因为传声器40c1、传声器40c2量程S距离数值小,故侦测周期为Ts(2*S/v)也小,因此,传声器40c1、传声器40c2在近距离S内具有较高的侦测反应速度,即传感器40在近距离S内具有较高的侦测反应速度。
当传感器侦测到近距离S内有物体,与此同时,传声器40c3、传声器40c4以Lr为量程进行工作,S<Lr<Lf,侦测方式见图4,图4为本发明设置四个传声器传感器近距离B侦测时序示意图。传声器40c3、传声器40c4的侦测周期皆为Tr(2*Lr/v)。
TA-40c3为传声器40c3的发射信号,SA-40c3为传声器40c3的回波信号,TA-40c4为传声器40c4的发射信号,SA-40c4为传声器40c4的回波信号。传声器40c3以48K工作频率工作,传声器40c4以52K工作频率工作,传声器40c3、传声器40c4以均匀、相近的时间间隔依次进行发射信号。传声器40c3与传声器40c4开始发射时间间隔为Trj1,传声器40c4与下一周期传声器40c3开始发射时间间隔为Trj2,Trj1≈Trj2≈Tr/2,Trj1+Trj2=Tr。
传声器40c3与传声器40c4对同一物体进行侦测,因此侦测到时,传声器40c3与传声器40c4回波信号时间间隔为Trj1,传声器40c4与下一周期传声器40c3回波信号时间间隔为Trj2。在工作时间内,传声器40c3、传声器40c4按照设定的顺序、设定的时间间隔来发射信号。传感器根据传声器40c3、传声器40c4回波信号的接收顺序与传声器40c3、传声器40c4的发射顺序的一致性,以及传声器40c3、传声器40c4回波信号的时间间隔与传声器40c3、传声器40c4的开始发射时间间隔的一致性,来判别物体的侦测结果,获得侦测距离d。传声器40c3、传声器40c4用于对传声器40c1、传声器40c2的协同侦测工作,提高了传感器40的距离侦测精度,也提高了传感器的侦测反应速度。
本发明超声波传感器及侦测方法,传感器最少配有两个传声器,图5为本发明设置两个传声器的传感器结构示意图。传感器20拥有不同主工作频率的传声器20b1、传声器20b2,设,传声器20b1的主工作频率K1为48K,传声器20b2的主工作频率K2为52K。传声器20b1除了具有主工作频率K1,还有具有副工作频率K0,副工作频率K0为50K,传声器20b2除了具有主工作频率K2,52K,还有具有副工作频率K0,副工作频率K0为50K;即传声器20b1、传声器20b2具有共同副工作频率Kf,50K。
当传感器20侦测到近距离S内没有物体时,传声器20b1、传声器20b2,分别以48K、52K的主工作频率按设定时序进行发射及接收,以提高远距离的侦测反应速度。当传感器侦测到物体进入近距离S内时,传声器20b1、传声器20b2则以相同副工作频率50K,以一发一收方式进行工作,以消除或减小超声波传感器20的盲区,以此实现远近距离传感器优异的侦测性能。
本发明超声波传感器,所含传声器1、传声器2、……、传声器n(n≥2),均是集发射与接收功能为一体的传声器,如图1中的传声器40c1、传声器40c2、传声器40c3、传声器40c4,图5中的传声器20b1、传声器20b2,都是既能发射信号,也能接收信号。
本发明超声波传感器及侦测方法,既保证了远距离具有较高的侦测反应速度,也大幅减小或消除了传感器的盲区,且近距离也具有较高的侦测反应速度,传感器具有较优异的侦测性能,便于广泛运用于汽车、无人机、无人车、安防、机器人等各类交通工具及工业、电子设备等产品上。同时,采用收发一体的传声器,本发明在实现同样侦测性能的同时,节省了传声器的数量,降低了传感器的重量、成本,非常便利于在汽车、无人机等上的大批运用。
以上所述,仅为本发明较佳实施例而已,故不能依此限定本发明实施的范围,即依本发明专利范围及说明书内容所作的等效变化与修饰,皆应仍属本发明涵盖的范围内。
- 一种超声波传感器及侦测方法
- 一种超声波传感器表面异物侦测系统与流程