一种自动驾驶双目摄像头的测试视频黑箱
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及自动驾驶系统技术领域,特别是涉及一种自动驾驶双目摄像头的测试视频黑箱。
背景技术
视频黑箱是自动驾驶硬件在环测试系统中的重要组成部分,具有测试自动驾驶系统的视觉感知识别、决策执行算法的功能,及营造自动驾驶摄像头复杂光线的光学性能测试环境。传统的视频黑箱受其结构和原理的影响,目前只适用于测试单目摄像头,而目前随着自动驾驶技术的快速发展,在同一视角方向同时相邻并排安装广角、长焦双目摄像头方案的应用已越来越广泛。如在传统的视频黑箱中强行测试自动驾驶双目摄像头,则无法还原双目摄像头通过目标在两个摄像头中形成的视角差计算目标相对距离的特性,同时物体在双目摄像头中畸变特征也将有所偏差,导致视觉目标还原性较差,测试结果误差较大的情况。
发明内容
本发明提供一种自动驾驶双目摄像头的测试视频黑箱,能真实反映并还原双目摄像头在真实环境感知中的双目视角偏差,视觉畸变等特征,弥补目前无法对自动驾驶双目摄像头进行仿真在环测试的技术缺陷。
本发明一个实施例提供一种自动驾驶双目摄像头的测试视频黑箱,箱体内部包括:
两台垂直放置的显示器;
显示器支架,用于调节安装在所述显示器支架上的显示器的垂直高度、水平位置、纵向位置、仰角角度;
分隔两台显示器的隔板,所述隔板含有通光小孔,双目摄像头的一侧的摄像头通过所述通光小孔可拍摄显示器的屏幕;
两组透镜及用于调节透镜位置的透镜支架;其中,所述调节透镜位置包括:调节透镜的垂直方向的位置、纵向方向的位置。
进一步地,纵向方向是指在平面方向上的前后移动,垂直方向是指竖直方向上的上下移动。
进一步地,所述的一种自动驾驶双目摄像头的测试视频黑箱,还包括:
显示器支架滑轨,所述显示器支架通过所述显示器支架滑轨可进行纵向方向滑动;
显示器支架结构,所述显示器支架通过所述显示器支架实现垂直方向和水平方向的移动,通过支架上的转轴结构可进行俯仰调节。
进一步地,所述的一种自动驾驶双目摄像头的测试视频黑箱,还包括:摄像头调节支架,用于调节安装在所述摄像头支架上的摄像头的垂直高度、水平位置、纵向位置、仰角角度、水平朝向角度及横滚角度。
进一步地,所述的一种自动驾驶双目摄像头的测试视频黑箱,还包括:
摄像头调节支架滑轨,所述摄像头调节支架通过所述摄像头调节支架滑轨可进行垂直方向、水平方向及纵向方向进行滑动;
摄像头调节支架转轴结构,所述摄像头调节支架通过所述摄像头调节支架转轴结构可进行俯仰、水平朝向、横滚角度调节。
进一步地,所述透镜用于使摄像头的拍摄角度发生偏转以拍摄对应显示器。
进一步地,所述透镜安装在双目摄像头与显示器之间,用于辅助双目摄像头进行对焦,并可以根据测试需要产生晕影、畸变及反光现象。
进一步地,所述隔板用于阻隔两台显示器的光线,使得两台显示器的光线不相互交叉。
进一步地,所述箱体结构可以阻隔外界光线进入所述箱体内部;所述箱体顶部为一可拆卸盖板。
进一步地,所述箱体内部侧壁表面涂满光线反射率极低的材料,且表面呈漫反射特性,可保证暗箱内除显示器的光线外,其他位置均处于完全黑暗的状态。
进一步地,所述显示器的亮度、分辨率、色准、色温、色深、色域、频闪特性参数均需满足摄像头测试的特殊要求。
与现有技术相比,本发明实施例的有益效果在于:
1、本发明提出了通过光线转向结构,控制双目摄像头的两侧摄像头分别拍摄位于不同方位的两块显示器,从而捕捉到摄像头安装位置、视角、视觉畸变都完全不同的图像。相比传统采用双目摄像头拍摄同一块显示器的方案,该方案能通过保证双目摄像头图像的独立性,并可还原双目摄像头通过安装位置差异,物体在两摄像头中出现视角差从而计算目标的相对距离的特性;通过不同摄像头分屏,保证图像的准确性。
2、本发明提供一种新型针对自动驾驶双目摄像头硬件在环测试的视频黑箱,其能真实反映并还原双目摄像头在真实环境感知中的双目视角偏差,视觉畸变等特征,弥补目前无法对自动驾驶双目摄像头进行仿真在环测试的技术缺陷。
附图说明
为了更清楚地说明本发明的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明一种自动驾驶双目摄像头的测试视频黑箱的立体结构示意图;
图2是本发明一种自动驾驶双目摄像头的测试视频黑箱的盖板开启后的立体结构示意图;
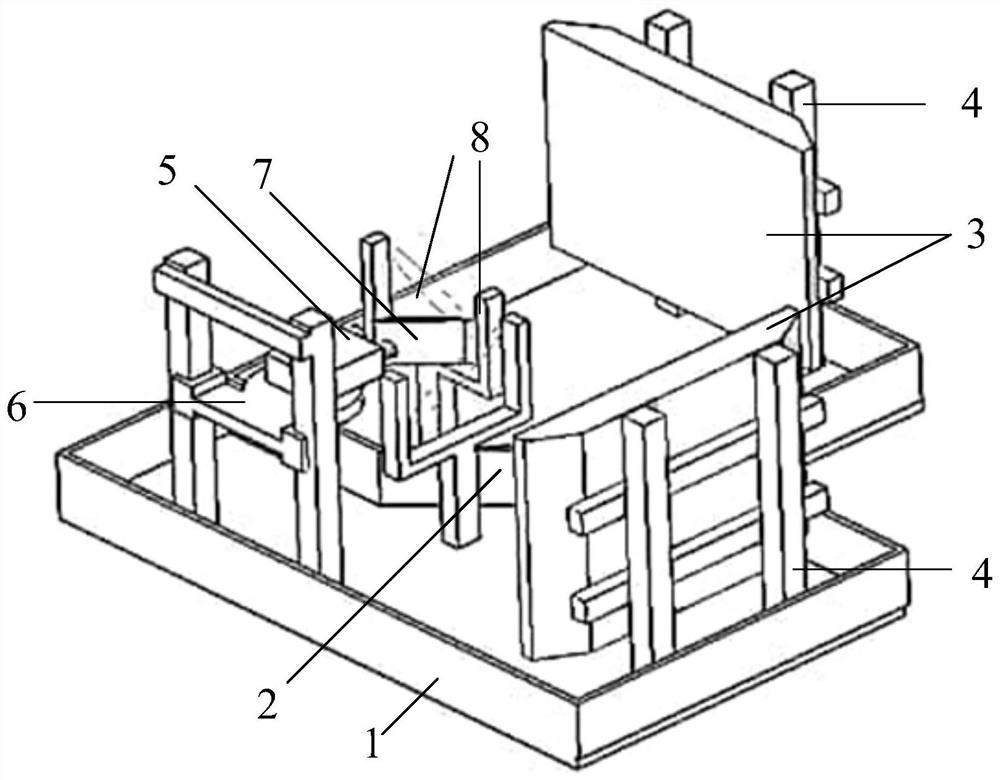
图3是本发明一种自动驾驶双目摄像头的测试视频黑箱的盖板开启,上部箱体结构隐蔽后的内部结构示意图;
图4是本发明一种自动驾驶双目摄像头的测试视频黑箱的俯视图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应当理解,文中所使用的步骤编号仅是为了方便描述,不对作为对步骤执行先后顺序的限定。
应当理解,在本发明说明书中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本发明。如在本发明说明书和所附权利要求书中所使用的那样,除非上下文清楚地指明其它情况,否则单数形式的“一”、“一个”及“该”意在包括复数形式。
术语“包括”和“包含”指示所描述特征、整体、步骤、操作、元素和/或组件的存在,但并不排除一个或多个其它特征、整体、步骤、操作、元素、组件和/或其集合的存在或添加。
术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
如图1~图4所示,一种自动驾驶双目摄像头的测试视频黑箱,箱体结构包括视频黑箱主体1、视频黑箱上盖板9、暗箱内部隔板2组成。视频黑箱的外部形状呈“L型”,暗箱结构具备良好阻隔外界光线的性能,可以保证箱体内部的测试环境不受外界测试光线的干扰。箱体内部中间安装有分隔两侧显示器光线的隔板2,可以保证两台显示器的光线不发生互相串扰。隔板2上留有一通光小孔、可让双目摄像头的一侧摄像头通过小孔拍摄其中一台显示器的画面。暗箱内部表面涂满光线反射率极低的材料,且表面呈漫反射特性,可保证暗箱内除显示器的光线外,其他位置均处于完全黑暗的状态。暗箱结构顶部具有可以开启的盖板9,盖板打开后可以对箱体内部的设备进行安装、调节和维护。
箱内两端内部有两台专业的彩色图形显示器3,显示器的亮度、分辨率、色准、色温、色深、色域、频闪等关键特性参数均需满足摄像头测试的特殊要求,以保证测试的准确性和一致性,两台显示器的显示画面是独立控制的,两台显示器的画面内容能通过计算还原出双目摄像头因安装位置、摄像头物理特性、安装位置周边障碍物遮挡等因素,同时同一目标物在双目摄像头中的视角差异也能够被有效还原。两台显示器分别安装在多自由度可调的支架4上,支架在各自由度方向上均安装有滑轨和转轴,以保证摄像头和显示器可根据测试的需要,调节各自的位置和朝向角度,可实现显示器的垂直高度、水平位置、纵向安装位置俯仰角度四个自由度可调。
箱体内的被测摄像头5安装多自由度可调的支架6上,可通过调节支架控制双目摄像头的垂直高度、水平位置、纵向安装位置、俯仰角度、水平朝向角度、横滚角度六个自由度。被测摄像头5的其中一个摄像头通过暗箱隔板上的小孔直接拍摄前方显示器的画面,另一个摄像头前方有一个光线转向装置7,该装置可以为一块精密加工的平面镜,也可以为一组由平面镜和透镜组成的镜组,该可以使通过该装置的光线传播方向发生90度的偏转,可以使拍摄方向偏转90度拍摄另一侧显示器的画面。两侧摄像头与显示器之间各有一组透镜8,并安装在纵向位置和高度可调节的支架上。该透镜的作用有:(1)辅助双目摄像头对焦,使原本对焦点较远的摄像头能捕捉到距离较近的屏幕清晰的影像;(2)辅助产生晕影、畸变、反光等效果。
- 一种自动驾驶双目摄像头的测试视频黑箱
- 一种自动驾驶双目摄像头的测试视频黑箱