电路基板
文献发布时间:2023-06-19 11:21:00
本申请是申请日为2018年9月28日,申请号为201811136842.4,发明名称为“电路基板和控制装置”的发明专利申请的分案申请。
技术领域
本发明的一个方式涉及电路基板和控制装置。
背景技术
汽车等车辆具备例如电动助力转向系统作为车载装置。当受理了驾驶员的方向盘操作时,电动助力转向系统产生用于辅助转向系统的转向扭矩的辅助扭矩。电动助力转向系统通过产生辅助扭矩,能够减轻驾驶员的驾驶操作的负担。产生辅助扭矩的辅助扭矩机构检测转向扭矩,根据检测信号产生驱动信号,由马达根据驱动信号产生辅助扭矩。由此经由减速机构将与转向扭矩对应的辅助扭矩传递至转向系统。
在上述技术中,例如,日本国特许第5777797号公报公开了一种具备马达驱动装置的电动助力转向系统。该电动助力转向系统具备马达驱动装置的共模滤波器。共模滤波器包含共模线圈和电容器。然而,共模线圈会使共模滤波器大型化。另一方面,不具有共模线圈的共模滤波器虽然能够使马达驱动装置小型化,但是不能充分降低共模噪声。
发明内容
本发明的一个目的是提供能够有助于降低噪声的电路基板和控制装置。
在本申请的例示性的一个实施方式中,电路基板具备:基板主体;电路部,其被形成于所述基板主体,向马达供给电力;所述电路部的正极侧电源端子部,其被形成于所述基板主体,与正极端子连接;以及所述电路部的负极侧电源端子部,其被形成于所述基板主体,与负极端子连接,所述基板主体具有沿厚度方向贯通所述基板主体的第1贯通孔、第2贯通孔和第3贯通孔,所述第1贯通孔和所述第2贯通孔相比于所述第3贯通孔,被设置于所述基板主体的外端侧,所述电路部具备第1电容器和第2电容器,所述第1电容器和所述第2电容器串联连接于所述正极侧电源端子部与所述负极侧电源端子部之间,所述电路基板还具备导体部,该导体部被形成于所述第3贯通孔的至少一部分,所述导体部经由所述第1电容器与所述正极侧电源端子部电连接,经由所述第2电容器与所述负极侧电源端子部电连接,所述导体部的至少一部分是导电体,能够与安装所述基板主体的单元电连接。
根据本申请的例示性的一个实施方式,能够有助于噪声的降低。
根据以下参考附图对优选实施例的详细描述,本发明的上述内容和其他元件、特性、步骤、特征和优点将变得更加清楚。
附图说明
图1是示出实施方式的电动助力转向系统的结构例的概要图。
图2是示出电子控制单元的内部结构例的电路图。
图3是电子控制单元的分解立体图的一例。
图4A是罩单元的俯视图。
图4B是电路基板的俯视图。
图4C是基板安装单元的俯视图。
图5是示出电路基板中的导体图案的一例的俯视图。
图6是示出电路基板中的层内结构的一例的剖视图。
图7是示出电路基板200中的层内结构的另一例的剖视图。
图8是另一电路基板的俯视图。
图9是另一电路基板的俯视图。
图10是示出贯通孔与第一电容器、第二电容器、驱动电源安装孔和驱动电源安装孔之间的位置关系的一例的概要图。
图11是用于说明能够形成贯通孔的区域的图。
图12是用于说明能够形成贯通孔的另一区域的图。
图13是示出变形例的基板安装单元的一例的立体图。
具体实施方式
以下,参照附图对应用本发明的电路基板和控制装置进行说明。
图1是示出实施方式的电动助力转向系统1的结构例的概要图。电动助力转向系统1具备例如转向系统10、辅助扭矩机构部30、控制装置50和电池51。电动助力转向系统1将由辅助扭矩机构部30产生的辅助扭矩传递至转向系统10。电动助力转向系统1作为驱动后述的马达的马达驱动装置发挥功能以产生辅助扭矩。
转向系统10具备方向盘11、转向轴12、万向联轴器13A和13B、旋转轴部14、齿轮齿条副15、齿条轴部16、拉杆17A和17B、转向节18A和18B、转向车轮19A和19B、球形接头20A和20B。
方向盘11由车辆的驾驶员操纵。转向轴12、万向联轴器13A和13B以及旋转轴部14(也称为小齿轮轴、输入轴)依次与方向盘11联结。齿条轴部16经由齿轮齿条副15与旋转轴部14联结。左右转向车轮19A和19B经由左右球形接头20A和20B、左右拉杆17A和17B以及左右转向节18A和18B而与齿条轴部16的两端联结。齿轮齿条副15具备小齿轮15a和齿条15b。小齿轮15a与旋转轴部14联结。齿条15b设置于齿条轴部16中。
根据转向系统10,当驾驶员操纵方向盘11时,可以通过转向扭矩并经由齿轮齿条副15而使转向车轮19A和19B转向。
辅助扭矩机构部30具备例如转向扭矩检测部31、电子控制单元32、马达33和减速机构部34。
转向扭矩检测部31例如是转向扭矩传感器。转向扭矩检测部31检测施加至方向盘11的转向扭矩,生成扭矩信号。
马达33例如是具有包含U相、V相和W相的三相马达电源端子的马达。马达33例如是无刷马达。马达33根据驱动信号产生辅助扭矩。辅助扭矩经由减速机构部34传递至旋转轴部14。
减速机构部34例如是蜗轮机构。传递至旋转轴部14的辅助扭矩从旋转轴部14被传递至齿轮齿条副15。
电子控制单元32具备例如电源电路、检测马达电流(实际电流)的电流传感器、微处理器、FET(Field effect transistor:场效应晶体管)桥电路和磁传感器32a。磁传感器32a检测马达33中的转子的旋转角。转子例如是永久磁铁,磁传感器32a通过检测永久磁铁(N极和S极)的运动来检测旋转角。
电子控制单元32不仅输入扭矩信号,例如还输入车速信号作为外部信号。电子控制单元32针对由扭矩信号表示的转向扭矩来运算应由马达33产生的辅助扭矩。电子控制单元32生成驱动信号,使得在马达33产生运算出的辅助扭矩。
控制装置50是能够经由例如CAN(Controller Area Network:控制器区域网络)等车内网络与另一电子控制单元通信的电子控制单元。控制装置50也可以是例如能够输出与车速信号对应的车速脉冲的车速传感器。外部信号包括扭矩信号等电动助力转向系统1的信号和车速信号等车辆的信号(车体信号)。车体信号不仅可以包括车速信号、发动机转速等通信信号,还可以包括表示点火开关的接通或断开的信号。
电子控制单元32的微处理器通过根据例如扭矩信号及车速信号等使FET桥电路工作来对马达33进行矢量控制。FET桥电路例如是向马达33通上驱动电流(三相交流电)的逆变器电路INV(参照图2)。如图2所示,例如,FET桥电路包含FET1、FET2、FET3、FET4、FET5和FET6。
电子控制单元32根据至少表示转向扭矩的扭矩信号来设定目标电流。优选的是,电子控制单元32还考虑车辆的车速和转子的旋转角来设定目标电流。电子控制单元32控制马达33的驱动电流(驱动信号),使得马达电流(实际电流)与目标电流一致。
电池51是蓄积供给至电子控制单元32的电力的蓄电池。B+表示例如作为直流电源而设置于车辆中的电池51的正极电位,B-表示电池51的负极电位。负极电位B-与车辆的车体接地。另外,电子控制单元32在作为外部连接器的电源连接器PCN处具备作为与电池51侧的端子连接或接触的部分的端子(正端子T+和负端子T-)。作为正极电位B+与负极电位B-之差的电源电压是马达33的驱动电压之源。
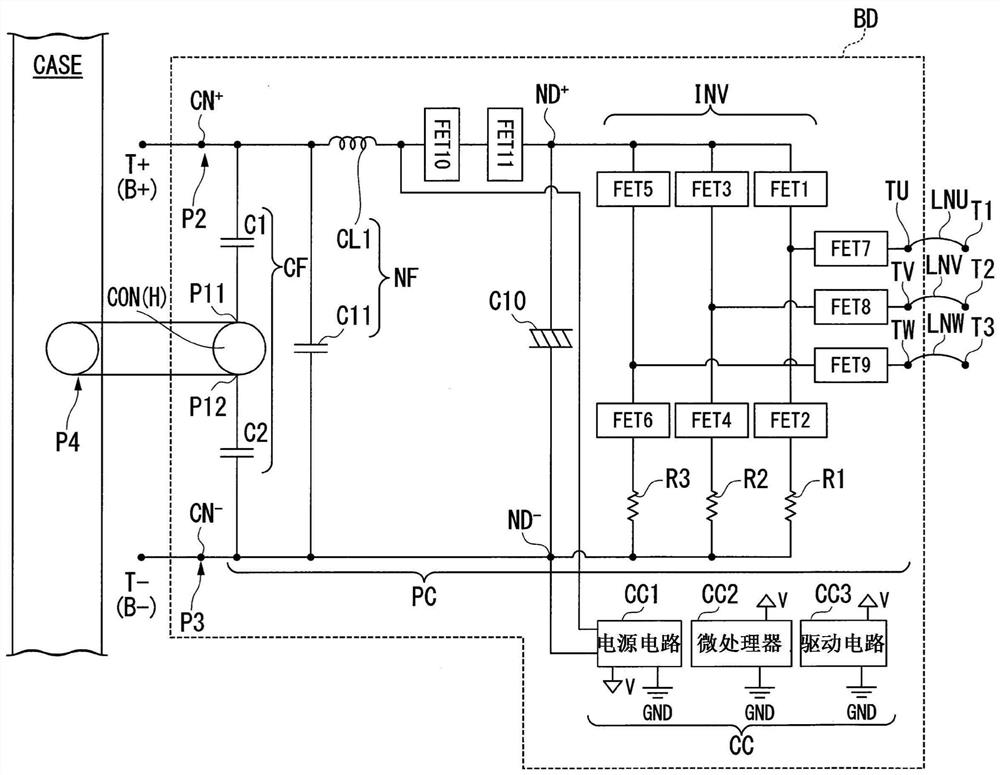
图2是示出电子控制单元32的内部结构例的电路图。电子控制单元32通过马达33产生基于转向扭矩的辅助扭矩,但是图2的电子控制单元32的用途不限于此。即,图2的电子控制单元32只要能够驱动三相交流马达即可,图2的微处理器只要能够根据任意信号控制三相交流马达的驱动电流即可。
电子控制单元32形成于电路基板BD上。在电路基板BD上形成有基板正连接部CN+和基板负连接部CN-、逆变器输出端子TU、TV和TW。基板正连接部CN+和基板负连接部CN-与电池51连接。逆变器输出端子TU、TV和TW与马达33连接。电源电路部PC连接于基板正连接部CN+和基板负连接部CN-与逆变器输出端子TU、TV和TW之间。
基板正连接部CN+与正端子T+连接。正端子T+相当于输入电池51的正极电位B+的输入端子。正端子T+被施加电池51的正极电位B+。电位B+被传递至基板正连接部CN+。
基板负连接部CN-与负端子T-连接。负端子T-相当于输入电池51的负极电位B-的输入端子。基板负连接部CN-与负端子T-连接。负端子T-被施加电池51的负极电位B-。电位B-被传递至基板负连接部CN-。当负端子T-与车辆的车体接地时,电位B-与车体的GND电位为相同电位。
逆变器电路INV包含6个FET1~FET6。6个FET1~FET6连接于与基板正连接部CN+连接的电位B+的正极线和与基板负连接部CN-连接的电位B-的负极线之间。场效应电容器C10在正极线与负极线之间与逆变器电路INV并联连接。电解电容器C10对电源电压(电位B+与电位B-之差)进行平滑。
FET1和FET2串联连接于正极线与负极线之间。FET1和FET2将U相电流提供给马达33的U相绕组。分流电阻R1与FET1和FET2串联连接于FET2与负极线之间。通过用于检测U相电流的电流传感器(未图示)检测流过分流电阻R1的电流。FET7被连接于连接FET1和FET2的线与逆变器输出端子TU之间。FET7切断U相电流或使U相电流通过。
FET3和FET4串联连接于正极线与负极线之间。FET3和FET4将V相电流提供给马达33的V相绕组。分流电阻R2与该FET3和FET4串联连接于FET4与负极线之间。通过用于检测V相电流的电流传感器(未图示)检测流过分流电阻R2的电流。FET8被连接于连接FET3和FET4的线与逆变器输出端子TV之间。FET8切断V相电流或使V相电流通过。
FET5和FET6串联连接于正极线与负极线之间。FET5和FET6将W相电流提供给马达33的W相绕组。分流电阻R4与该FET5和FET6串联连接于FET6与负极线之间。通过用于检测W相电流的电流传感器(未图示)检测流过分流电阻R3的电流。FET9被连接于连接FET5和FET6的线与逆变器输出端子TW之间。FET9切断W相电流或使W相电流通过。
逆变器输出端子TU经由电源线部LNU与马达33的马达电源端子T1连接。逆变器输出端子TV经由电源线部LNV与马达33的马达电源端子T2连接。逆变器输出端子TW经由电源线部LNW与马达33的马达电源端子T3连接。
FET1~FET6通过分别被进行PWM控制而将U相电流、V相电流和W相电流提供给马达33。例如,将FET10和FET11作为能够切断电力的半导体继电器而连接于连接逆变器电路INV和电解电容器C10的正极线的节点ND+的前级。此外,常态滤波器NF设置在FET10和FET11的前级。常态滤波器NF包含线圈CL1和电容器C11。线圈CL1连接于FET10与基板正连接部CN+之间。电容器C11与电场电容器C10并联连接于正极线和负极线之间。常态滤波器NF能够降低叠加在正极线上的常态噪声(normal mode noise)。
常态滤波器NF的前级与共模滤波器CF连接。共模滤波器CF的例如第一电容器C1和第二电容器C2与电解电容器C10并联连接。第一电容器C1和第二电容器C2串联连接于正极线与负极线之间。
共模滤波器CF连接于基板正连接部CN+与基板负连接部CN-之间。具体而言,第一电容器C1的一端经由正极线与基板正连接部CN+连接。第二电容器C2的一端经由负极线与基板负连接部CN-连接。第一电容器C1的另一端与导体部CON的位置P11连接。第二电容器C2的另一端与导体部CON的位置P12连接。
导体部CON是因共模噪声引起的电流可以流过的材料。导体部CON形成在贯通孔H中。贯通孔H是沿电路基板BD的厚度方向贯通该电路基板BD的孔。导体部CON与和第一电容器C1的另一端连接的导体图案电连接,并且与和第二电容器C2的另一端连接的导体图案电连接。此外,导体部CON与壳体CASE的具有导电性的部位P4电连接。由此,在导体部CON中,电流可以在第一电容器C1与第二电容器C2之间流动,并且,电流可以在第一电容器C1和第二电容器C2与壳体CASE之间流动。
虽然壳体CASE的部位P4的电位与电位B-(GND电位)不同,但是,优选部位P4也与车辆的车体接地。当壳体CASE的部位P4的电位是电位B-(GND电位)时,导体部CON能够进一步降低共模噪声。
在电路基板BD中还形成有控制电路部CC。控制电路部CC具有驱动电路,该驱动电路根据目标电流生成与FET1~FET6对应的6个控制信号(栅极信号),通过利用6个控制信号接通或断开FET1~FET6,向电动马达33提供驱动信号(驱动电流)。控制电路部CC包含电源电路CC1、微处理器CC2和驱动电路CC3。电源电路CC1通过例如FET10与线圈CL1的连接点和ND-引入电源电路部PC的电源电压(电位B+与电位B-(电位GND)之差),生成控制电路部CC的电源电压(电位V与电位GND之差)。微处理器CC2设定马达33的目标电流。驱动电路CC3生成分别接通/断开逆变器电路INV中的各FET1~FET6的控制信号,并将它们提供给FET1~FET6。
微处理器CC2控制FET7~FET11。微处理器CC2针对FET7~FET11分别决定接通或断开的状态。驱动电路CC3根据决定的结果生成与FET7~FET11对应的5个控制信号,将它们提供给FET7~FET11。
图3是电子控制单元32的分解立体图的一例。电子控制单元32例如具备罩单元100、电路基板200和基板安装单元300。电子控制单元32构成为由罩单元100和基板安装单元300夹着电路基板200。
图4A是罩单元100的俯视图。图4A是从图3中的下方观察罩单元100的图。罩单元100例如是金属制成的罩。罩单元100以使得电路基板200不会露出至外部的大小形成。此外,罩单元100例如与安装在电路基板200中的电路部件202对应地形成为凸形。此外,如图4A所示,罩单元100的与要被螺纹紧固的位置对应的位置被形成为凸形。
图4B是电路基板200的俯视图。电路基板200相当于上述的电路基板BD。电路基板200安装有上述的电解电容器C10等电路部件202。电路基板200中例如形成有贯通孔204a、204b、204c和204d、驱动电源安装孔206a和206b、控制信号安装孔208。另外,在不将贯通孔与其它贯通孔区分开的情况下,仅记述为“贯通孔204”。另外,在不将驱动电源安装孔与其它驱动电源安装孔区分开的情况下,仅记述为“驱动电源安装孔206”。
贯通孔204a、204b和204c形成在电路基板200的外端部附近。贯通孔204d形成在比电路基板200的外端部靠内侧的位置。贯通孔204d相当于上述的贯通孔H。形成有贯通孔204d的位置相当于上述的P11和P12。
将螺栓210a插入贯通孔204a中。将螺栓210b插入贯通孔204b中。将螺栓210c插入贯通孔204c中。将螺栓210d插入贯通孔204d中。螺栓210a、210b、210c和210d经由贯通孔204a、204b、204c和204d插入基板安装单元300的螺纹孔302a、302b、302c和302d中。螺栓210a、210b、210c和210d通过螺纹紧固工序对电路基板200和基板安装单元300进行螺纹紧固。
虽然螺栓210a、螺栓210b和螺栓210c是导体,但不限于此,也可以不是导体。螺栓210d是导体。螺栓210d相当于上述的导体部CON。
从与电源电路部PC的安装面相反的面将电源单元400的正端子402插入驱动电源安装孔206a中。驱动电源安装孔206a通过与电源单元400的正端子402机械地连接而与电源单元400电连接。从与电源电路部PC的安装面相反的面将电源单元400的负端子404插入驱动电源安装孔206b中。驱动电源安装孔206b通过与电源单元400的负端子404机械地连接而与电源单元400电连接。
从与电源电路部PC的安装面相反的面将电源单元400的信号连接端子406和408插入控制信号安装孔208中。控制信号安装孔208通过与电源单元400的信号连接端子406和408机械地连接而与电源单元400电连接。
图4C是基板安装单元300的俯视图。基板安装单元300例如是散热器,但不限于此。基板安装单元300也可以是例如轴承保持器。此外,基板安装单元300也可以是将散热器和轴承保持器一体化的单元。马达壳体(未图示)被螺纹紧固于基板安装单元300的与安装有电路基板200的面相反的面上。马达壳体是收纳马达33的壳体。
在基板安装单元300形成有螺纹孔302a、302b、302c和302d。螺纹孔302a、302b和302c形成在基板安装单元300的外端部附近。螺纹孔302d形成在基板安装单元300的比外端部靠内侧的位置。形成有螺纹孔302d的位置相当于上述的P4。
将插入于贯通孔204a中的螺栓210a插入螺纹孔302a中。将插入于贯通孔204b中的螺栓210b插入螺纹孔302b中。将插入于贯通孔204c中的螺栓210c插入螺纹孔302c中。将插入于贯通孔204d中的螺栓210d插入螺纹孔302d中。
基板安装单元300的至少一部分由导体形成。具体而言,包含螺纹孔302d的基板安装单元300的一部分由导体形成。优选的是,包含螺纹孔302d的基板安装单元300的一部分与GND端子(未图示)连接,与GND电位为相同电位。
电源单元400例如具备正端子402、负端子404、信号连接端子406和408。此外,电源单元400形成有用于将该电源单元400与基板安装单元300螺纹紧固的螺纹孔410。在螺纹紧固工序中,将螺栓412插入螺纹孔410中,将电源单元400与基板安装单元300机械地连接。这时,正端子402被安装于驱动电源安装孔206a中,负端子404被安装于驱动电源安装孔206b中,信号连接端子406和408被安装于控制信号安装孔208中。在正端子402被安装于驱动电源安装孔206a中的状态下通过焊料流动工序进行焊接。由此将正端子402与驱动电源安装孔206a电连接。在负端子404被安装于驱动电源安装孔206b中的状态下通过焊料流动工序进行焊接,由此将负端子404与驱动电源安装孔206b电连接。
图5是示出电路基板200中的导体图案的一例的俯视图。图6是示出电路基板200中的层内结构的一例的剖视图,并且是图5中的沿A-A#线的剖视图。
例如,如图6所示,电路基板200形成为四层结构。即,电路基板200例如具备L1层200A、L2层200B、L3层200C和L4层200D。从基板安装单元300侧起,按照L4层200D、L3层200C、L2层200B、L1层200A顺序将这些层层叠。L1层200A配置在罩单元100侧。L4层200D配置在基板安装单元300侧、即马达33侧。
如图5和图6所示,在L1层200A的罩单元100侧的面(以下记述为第1面200a)上形成有第一电容器C1、导体图案220a和220b、贯通孔204d、第二电容器C2、导体图案222a和222b、导体图案224。在导体图案220a上形成保护层230a。在导体图案220b上形成保护层230b。在第一电容器C1与L1层200A之间形成保护层230c。在导体图案222a上形成保护层230d。在导体图案222b上形成保护层230e。在第二电容器C2与L1层200A之间形成保护层230f。导体图案220a与正端子T+电连接。第一电容器C1与导体图案220a电连接。第一电容器C1与导体图案220b电连接。导体图案224形成在第1面200a的贯通孔204d周围。导体图案220b与导体图案224电连接。如图6所示,导体图案224在螺栓210d被螺纹紧固的状态下与该螺栓210d导通。导体图案224与导体图案222a电连接。第二电容器C2与导体图案222a电连接。第二电容器C2与导体图案222b电连接。导体图案222b与负端子T-电连接。
另外,如图5所示,导体图案220b和导体图案222a直接连接,但不限于此,在安装有螺栓210d的情况下,只要将第一电容器C1与第二电容器C2电连接,并且将第一电容器C1和第二电容器C2与基板安装单元300电连接即可。即,导体图案220b和导体图案222a可以不彼此电连接,也可以分别与导体图案224连接。此外,导体图案220b和导体图案222a也可以不分别与导体图案224连接,而是在安装有螺栓210d的情况下,经由螺栓210d与导体图案224电连接。
如图5所示,导体图案220c和220d形成在驱动电源安装孔206a的周围。利用焊料流动工序经由焊料将导体图案220c和220d与正端子402连接。导体图案222c和222d形成在驱动电源安装孔206b的周围。利用焊料流动工序经由焊料将导体图案222c和222d与负端子404连接。另外,在图5中,也可以不存在导体图案222b中的夹在导体图案220b与导体图案220a之间的区域的导体图案。此外,在图5中,保护层露出至第1面200a中的未形成导体图案的区域。
在L1层200A、L2层200B、L3层200C和L4层200D中,在从L1层200A沿厚度方向贯通L4层200D的贯通孔(未图示)中形成嵌体(未图示)。嵌体例如是埋入直径为几毫米的贯通孔中的铜等热传递效率良好的材料。在电路基板200的罩单元100侧的面上安装有FET1~FET6。嵌体和贯通孔配置在安装于L1层200A的FET1~FET6的基板安装单元300侧。嵌体能够将因FET1~FET6的开关产生的热传递至基板安装单元300。
另外,在图6所示的电路基板200中,虽然形成于L1层200A的导体图案与正端子T+和负端子T-连接,但不限于此。L2层200B也可以是经由基板正连接部CN+与正端子T+连接的电源层。L3层200C也可以是经由基板负连接部CN-与负端子T-连接的GND层。
如以上进行了说明的那样,在本实施方式的电子控制单元32中,螺栓210d在被螺纹紧固于螺纹孔302d的状态下将第一电容器C1和第二电容器C2电连接,并且与导体图案224和基板安装单元300导通。由此,根据电路基板200,能够降低共模噪声。即,电路基板200形成有导体部(螺栓210d),该导体部与第一电容器C1、第二电容器C2、基板正连接部CN+、基板负连接部CN-电连接,并且至少一部分是导电体,能够与安装电路基板200的基板安装单元300电连接的。由此,根据电路基板200,能够使因在马达驱动时产生的共模噪声的至少一部分而产生的电流经由导体部CON流过基板安装单元300,其结果是,能够降低共模噪声。
此外,根据电路基板200,形成沿厚度方向贯通基板主体的贯通孔H(贯通孔204d),贯通孔的至少一部分形成在夹在第一电容器C1、第二电容器C2、基板正连接部CN+以及基板负连接部CN-中的至少两个之间的位置。由此,根据电路基板200,可以利用贯通孔将电路基板200安装于基板安装单元300。该情况下,通过将螺栓210d用于电路基板200与基板安装单元300之间的定位,能够使因在马达驱动时产生的噪声引起的电流经由该螺栓210d流到GND。其结果是,根据电路基板200,能够有助于共模噪声的降低。
共模噪声是由于施加至马达33的线圈的电压发生变动而产生的交流电(包含大量AC分量的电流)。该共模噪声经由马达33的线圈的寄生电容传递至基板安装单元300,并经由车体等GND导体从该基板安装单元300传递至电池51的负端子T-。由此使得负端子T-处的电位(GND电位)发生变动。假设没有导体部CON时,则共模噪声经由基板安装单元300、车体、负端子T-传递至基板负连接部CN-,形成大环。
与此相对,通过如本实施方式那样将导体部CON形成在第一电容器C1与第二电容器C2之间,由此使得即使共模噪声传递至基板安装单元300,也从基板安装单元300传递至导体部CON、第一电容器C1和第二电容器C2、基板正连接部CN+和基板负连接部CN-,从而形成小于没有导体部CON时的环的环。此外,由于共模噪声包含大量AC分量,因此流入阻抗比车体等低的第一电容器C1和第二电容器C2。由此,根据电路基板200,与没有导体部CON的情况相比较,能够缩小共模噪声的环,从而能够有助于降低共模噪声。
另外,例如在将导体部CON形成于电路基板200的GND部(基板负连接部CN-)而安装到基板安装单元300的情况下,担心DC分量对电路基板200的影响。与基板安装单元300电连接的、车体等GND导体的阻抗由于导体间的紧固部的机械接触等而发生变动。由于车体等GND导体的阻抗发生变动,因此流过车体等GND导体的电流也发生变动。其结果是,当将导体部CON形成于电路基板200的GND部而安装到基板安装单元300时,存在GND电平变得不稳定并且马达驱动装置(电源电路部PC)的动作不稳定的可能性。通过如本实施方式那样将导体部CON形成在第一电容器C1与第二电容器C2之间,还能够避免DC分量对电路基板200的影响。
此外,根据电路基板200,在将贯通孔H形成为螺纹孔的情况下,仅通过对电路基板200和基板安装单元300进行螺纹紧固的工序,就可以在不追加新工序的情况下降低共模噪声。
此外,根据电路基板200,由于具备形成在贯通孔204d周围的第1导体图案224,因此能够在与用于导通第一电容器C1和第二电容器C2的导体图案(220a等)相同的工序中形成导体图案224,而无需追加新工序。此外,通过扩大导体图案224的面积,能够提高噪声降低的效果。此外,根据电路基板200,通过设置贯通孔204d内的导体图案220g和222g,能够扩大螺栓210d与导体图案之间的接触面积,从而能够进一步提高噪声降低的效果。
图7是示出电路基板200中的层内结构的另一例的剖视图,并且是图5中的沿A-A#线的剖视图。虽然上述的贯通孔204d在第1面200a上形成导体图案224,但是也可以在内壁上设置导体部228以取代导体图案224,或者除了导体图案224之外还在内壁上设置导体部228。导体部228与形成在L4层200D的基板安装单元300侧的面上的导体图案226电连接。此外,通过扩大导体部228的面积,能够进一步提高噪声降低的效果。根据电路基板200,通过设置贯通孔204d内的导体部228,能够扩大螺栓210d与导体之间的接触面积,能够提高噪声降低的效果。此外,根据电路基板200,通过扩大导体图案224的面积,能够进一步提高噪声降低的效果。
图8是另一电路基板200的俯视图。如图8所示,导体图案可以以与图5不同的形状形成。在该导体图案中,导体图案220a和导体图案222b形成为以双方的间隙为中心对称的形状。此外,在夹在导体图案220a的切口部220a#与导体图案222b的切口部222b#之间的区域形成贯通孔204d。
第一电容器C1的一端设置于导体图案220a的切口部220a#内。此外,在第一电容器C1的另一端侧形成导体图案220b,连接第一电容器C1的另一端与导体图案220b。导体图案220b与导体图案224连接。第二电容器C2的另一端设置于导体图案222b的切口部222b#。此外,在第二电容器C2的一端侧形成导体图案222a,连接第二电容器C2的一端与导体图案222a。导体图案222a与导体图案224连接。
图9是另一电路基板200的俯视图。导体图案220a具有两个切口部220a#1和220a#2。导体图案222b具有切口部222b#1和凸部222b#2。贯通孔204d、导体图案220b和导体图案222a形成在被切口部220a#1、220a#2、222b#1和凸部220b#2包围的区域。
即使是具有图8或图9所示的导体图案的电路基板200,也与上述实施方式相同,能够有助于共模噪声的降低。
图10是示出贯通孔204d与第一电容器C1、第二电容器C2、驱动电源安装孔206a(P2)和驱动电源安装孔206b(P3)之间的位置关系的一例的概要图。在假定有穿过基板正连接部CN+的位置P2、即驱动电源安装孔206a的位置与基板负连接部CN-的位置P3、即驱动电源安装孔206b的位置之间的中点(1)和第一电容器C1与第二电容器C2之间的中点(2)的第1线L1的情况下,贯通孔204d的至少一部分形成于第1线L1与连接第一电容器C1和第二电容器C2的第2线L2相交的位置。
在电路基板200螺纹紧固有罩单元100和基板安装单元300的情况下,能够形成包含贯通孔204d的电流环。具有贯通孔204d时的电流环小于没有贯通孔204时的电流环。其结果是,根据电路基板200,能够使因在马达驱动时产生的噪声引起的电流经由贯通孔204d内的导体部CON、第一电容器C1和第二电容器C2流到基板正连接部CN+和基板负连接部CN-,因此能够有助于降低共模噪声。
如图10所示,在电路基板200中,可以是,驱动电源安装孔206a形成在第1方向上的第1位置,驱动电源安装孔206b形成在第1方向上的第2位置,贯通孔204d的至少一部分在第1方向上形成在第1位置与第2位置之间的位置。第1方向是指,连接形成有驱动电源安装孔206a的位置和形成有驱动电源安装孔206b的位置的线所延伸的方向。第1位置是指能够形成驱动电源安装孔206a的位置,并且是连接正端子402的位置。第2位置是指能够形成驱动电源安装孔206b的位置,并且是连接负端子404的位置。即使在该情况下,电路基板200也能够形成包含贯通孔204d的电流环。具有贯通孔204d时的电流环小于没有贯通孔204时的电流环。
如图10所示,在电路基板200中,可以是,第一电容器C1形成在第2方向上的第3位置,第二电容器C2形成在第2方向上的第4位置,贯通孔204d的至少一部分在第2方向上形成在第3位置与第4位置之间的位置。第2方向是指,连接形成有第一电容器C1的位置和形成有第二电容器C2的位置的线所延伸的方向。第3位置是指能够安装第一电容器C1的位置,并且是从基板正连接部CN+延伸的导体图案与第一电容器C1连接的位置。第4位置是指能够安装第二电容器C2的位置,并且是从基板负连接部CN-延伸的导体图案与第二电容器C2连接的位置。即使在该情况下,电路基板200也能够形成包含贯通孔204d的电流环。具有贯通孔204d时的电流环小于没有贯通孔204时的电流环。
另外,在图10中,将连接驱动电源安装孔206a和206b的方向设为第1方向,但是,连接第一电容器C1和第二电容器C2的第2方向可以是与第1方向不同的方向。
图11是用于说明能够形成贯通孔204d的区域的图。贯通孔204d的至少一部分可以形成于被驱动电源安装孔206a的外端部206a#1和驱动电源安装孔206b的外端部206b#1、第一电容器C1的外端部C1#1、第二电容器C2的外端部C2#1包围的区域500A。即使在该情况下,电路基板200也能够形成包含贯通孔204d的电流环。具有贯通孔204d时的电流环小于没有贯通孔204时的电流环。
图12是用于说明能够形成贯通孔204d的另一区域的图。贯通孔204d的至少一部分可以形成于被驱动电源安装孔206a的内端部206a#2和驱动电源安装孔206b的内端部206b#2、第一电容器C1的内端部C1#2、第二电容器C2的内端部C2#2包围的区域500B。即使在该情况下,电路基板200也能够形成包含贯通孔204d的电流环。具有贯通孔204d时的电流环小于没有贯通孔204时的电流环。
图13是示出变形例的基板安装单元300的一例的立体图。基板安装单元300具备凸部310以取代螺纹孔302d。凸部310由导体形成。优选凸部310与GND电位连接。凸部310例如堵住螺纹孔302d,其被安装在被堵住的螺纹孔302d的表面。例如,在电路基板200被安装于基板安装单元300的情况下,凸部310与第一电容器C1和第二电容器C2电连接。此外,在贯通孔204d的内壁上形成有与第一电容器C1和第二电容器C2电连接的导体的情况下,凸部310可以与该导体电连接。即使在该情况下,电路基板200也能够形成包含贯通孔204d的电流环。具有贯通孔204d时的电流环小于没有贯通孔204时的电流环。
本发明可以用于例如电路基板和控制装置。
只要不产生冲突,可以适当地组合上述优选实施例的特征及其修改。
虽然上面已经描述了本发明的优选实施例,但是应该理解,在不脱离本发明的范围和精神的情况下,对于本领域技术人员来说,变化和修改是显而易见的。因此,本发明的范围仅由权利要求确定。
- 电路基板用树脂组合物、电路基板用成型体、电路基板用层积体和电路基板
- 印刷电路基板制造用剥离膜、印刷电路基板制造用剥离膜的制造方法、印刷电路基板的制造方法、及印刷电路基板