一种多ROV水下协同作业仿真系统
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及ROV技术领域,特别是关于一种多ROV水下协同作业仿真系统。
背景技术
ROV(中文全称为:遥控无人潜水器;英文全称为:remotely operationalvehicle)在诸如深海矿物开采、线缆铺设和设备检修等方面的协同作业中发挥着重要的作用。但是,协同作业需要多台ROV,而采购多台ROV所需成本巨大。同时,不熟练的操作人员非常容易发生误操作,造成ROV的损坏甚至丢失。因此,如何在尽量低的成本下实现对操作人员在多ROV水下协同作业中的技能培训,是一个迫切需要解决的难题。
根据调研,目前水下作业机器人仿真系统通常不具备模拟多台ROV协同作业的功能,无法让操作者具有沉浸式的良好体验。
发明内容
本发明的目的在于提供一种基于VR(中文全称为:虚拟现实;英文全称为:virtualreality)的多ROV水下协同作业仿真系统,基于VR技术能够实现多ROV水下协同作业仿真,简化系统硬件架构,提升仿真系统可靠性,减少操作员培训所需时长,提升操作员的沉浸式体验,降低ROV损毁丢失等风险。
为实现上述目的,本发明提供一种多ROV水下协同作业仿真系统,其特征在于,包括VR操控模块、仿真模块、场景同步模块和UI界面模块,所述VR操控模块、仿真模块和UI界面模块同时预设在VR设备中,所述场景同步模块预设在服务器中;所述VR操控模块用于实时采集操作者双手在所述VR设备上通过操控功能元件输入的控制指令以及所述操作者双手的位姿信息,并实时传送至所述仿真模块;所述仿真模块包括场景仿真单元、运动仿真单元和传感器仿真单元,其中:所述场景仿真单元用于构建并存储供所述操作者通过输入所述控制指令进行选择加载的水下场景模型、ROV和虚拟双手,其中,所述虚拟双手按照所述操作者双手的位姿信息,移动并操作所述UI界面模块上与所述控制指令相对应的功能按键;所述运动仿真单元用于根据所述控制指令、所述传感器仿真单元采集到的ROV状态信息,利用动力学模型和运动学模型计算所述ROV的位姿及速度,进而控制所述ROV实施ROV作业;所述传感器仿真单元用于模拟ROV搭载的摄像头、位姿传感器、速度传感器、深度传感器和压力传感器,采集所述ROV及其所处的所述水下场景模型的状态信息及图像信息;所述场景同步模块用于实时接收来自至少一台所述VR设备选择加载的所述ROV、同一所述水下场景模型作为作业场景及控制指令,并将各所述ROV同步至该作业场景中、以及将在该逻辑帧接收到的各所述VR设备的控制指令进行打包,再分发给各所述VR设备中的所述仿真模块;所述UI界面模块用于将所述仿真模块中的虚拟双手操控所述功能按键、每一所述ROV分别在所述作业场景中作业的状态信息及图像信息、及所述ROV同步在所述作业场景中协同作业的状态信息及图像信息通过视频矩阵显示在显示屏上。
进一步地,所述ROV具有ROV本体及安装在所述ROV本体上的机械臂、机械爪和摄像头;所述VR设备包括左操控手柄和右操控手柄,所述功能元件包括所述左手柄本体及其操控面板上设置的第一控制按键、第一按键、第二按键和左摇杆,还包括所述右操控手柄及其操控面板上设置的第二控制按键、第三按键、第四按键和右摇杆,所述控制指令执行的持续时间取决于对应所述功能元件状态保持的时长,所述功能原件的操控动作或不同种所述功能原件的组合操控动作预先设置为对应的所述控制指令。
进一步地,所述第一控制按键的“开启”操控动作与所述第一按键的“按下”操控动作组合的所述控制指令为“增加机械爪开度”;所述第一控制按键的“开启”操控动作与所述第二按键的“按下”操控动作组合的所述控制指令为“减少机械爪开度”;所述第一控制按键的“开启”操控动作与所述左摇杆的“上拨”操控动作组合的所述控制指令为“机械臂伸长”;所述第一控制按键的“开启”操控动作与所述左摇杆的“下拨”操控动作组合的所述控制指令为“机械臂收缩”;所述第一控制按键的“开启”操控动作与所述左摇杆的“左拨”操控动作组合的所述控制指令为“缆绳伸长”;所述第一控制按键的“开启”操控动作与所述左摇杆的“右拨”操控动作组合的所述控制指令为“缆绳收回”;所述第一控制按键的“开启”操控动作与所述左手柄本体的“前倾”操控动作组合的所述控制指令为“机械臂向上转动”;所述第一控制按键的“开启”操控动作与所述左手柄本体的“后倾”操控动作组合的所述控制指令为“机械臂向下转动”;所述第一控制按键的“开启”操控动作与所述左手柄本体的“左转”操控动作组合的所述控制指令为“机械臂向左转动”;所述第一控制按键的“开启”操控动作与所述左手柄本体的“右转”操控动作组合的所述控制指令为“机械臂向右转动”;所述第一控制按键的“开启”操控动作与所述左手柄本体的“右转”操控动作组合的所述控制指令为“机械臂向右转动”;所述第一控制按键的“开启”操控动作、所述第二控制按键的“开启”操控动作与所述左手柄本体的“顺时针转动”操控动作组合的所述控制指令为“机械爪顺时针旋转”;所述第一控制按键的“开启”操控动作、所述第二控制按键的“开启”操控动作与所述左手柄本体的“逆时针转动”操控动作组合的所述控制指令为“机械爪逆时针旋转”;所述第一控制按键的“开启”操控动作与所述第三按键的“按下”操控动作组合的所述控制指令为“ROV本体顺时针转动”;所述第一控制按键的“开启”操控动作与所述第四按键的“按下”操控动作组合的所述控制指令为“ROV本体逆时针转动”;所述第一控制按键的“开启”操控动作与所述右摇杆的“上拨”操控动作组合的所述控制指令为“ROV本体向前平移”;所述第一控制按键的“开启”操控动作与所述右摇杆的“下拨”操控动作组合的所述控制指令为“ROV本体向后平移”;所述第一控制按键的“开启”操控动作与所述右摇杆的“左拨”操控动作组合的所述控制指令为“ROV本体向左平移”;所述第一控制按键的“开启”操控动作与所述右摇杆的“右拨”操控动作组合的所述控制指令为“ROV本体向右平移”;所述第一控制按键的“开启”操控动作与所述右手柄本体的“前倾”操控动作组合的所述控制指令为“摄像头向上转动”;所述第一控制按键的“开启”操控动作与所述右手柄本体的“后倾”操控动作组合的所述控制指令为“摄像头向下转动”;所述第一控制按键的“开启”操控动作与所述右手柄本体的“左转”操控动作组合的所述控制指令为“摄像头向左转动”;所述第一控制按键的“开启”操控动作与所述右手柄本体的“右转”操控动作组合的所述控制指令为“摄像头向右转动”;所述第一控制按键的“开启”操控动作、所述第二控制按键的“开启”操控动作与所述右手柄本体的“顺时针转动”操控动作组合的所述控制指令为“工具托盘推出”;所述第一控制按键的“开启”操控动作、所述第二控制按键的“开启”操控动作与所述右手柄本体的“逆时针转动”操控动作组合的所述控制指令为“工具托盘收回”。
进一步地,所述场景仿真单元生成水下场景的方法包括如下步骤:步骤a1,采用第三方建模软件在充分考虑模型逼真度的情况下,构建三维的ROV、水下地形、作业对象模型、水下障碍物模型、水下动植物模型和虚拟双手;步骤a2,将步骤a1构建好的模型导出为游戏引擎Unity3D可读取的FBX格式;步骤a3,根据ROV的作业任务,选取步骤a1中的模型,搭建水下作业场景;步骤a4,根据ROV作业时所处的水下深度,设置合理的水下光照、水流方向及速度、波浪大小,提升场景仿真的真实性。
进一步地,所述传感器仿真单元用于模拟ROV搭载的摄像头、位姿传感器、速度传感器、深度传感器和压力传感器,采集所述ROV及其所处的所述水下场景模型的状态信息及图像信息,其模拟方法具体包括:步骤c1,根据需要采集的图像信号,确定相机放置的位置,并采用Unity3D自带的相机仿真摄像头,其中,该图像信号包括ROV的机械臂、机械爪、螺旋桨、缆绳收放装置、TMS与ROV连接处的局部图像;步骤c2,通过ROV运动学模型得到ROV位姿及速度的理想值加上高斯噪声,得到位姿传感器及速度传感器的输出值;步骤c3,根据步骤c3获得的速度传感器的输出值积分,加上高斯噪声,利用深度公式(15)计算深度传感器的输出值:
h(k+1)=h(k)+v(k)t+h
其中,h(k+1)及h(k)分别为ROV在k+1时刻及k的深度,其由深度传感器采集ROV所处深度获得;v(k)为ROV在垂直方向的线速度,由步骤c2获得的速度传感器获得;t为采样周期,h
步骤c4,根据下式(16)所示的液体压力公式,计算得到压力传感器的输出值:
p=ρ
其中,p为ROV所处位置的压力,ρ
本发明由于采取以上技术方案,其具有以下优点:
1、本发明基于VR技术,可以有效减少硬件复杂度及通信复杂度,降低系统成本。
2、本发明将3D游戏引擎与VR技术相结合,可以产生逼真的视觉效果,使得操作者具备良好的沉浸式体验。
3、本发明针对不同传感器特点采用不同的仿真方法,保证了传感器仿真的真实性。
4、本发明帧同步技术来同步场景,不仅支持单ROV作业仿真,也支持多ROV协同作业仿真,极大地扩展了系统的功能,可实现多机协同海底铺缆、采矿等。
附图说明
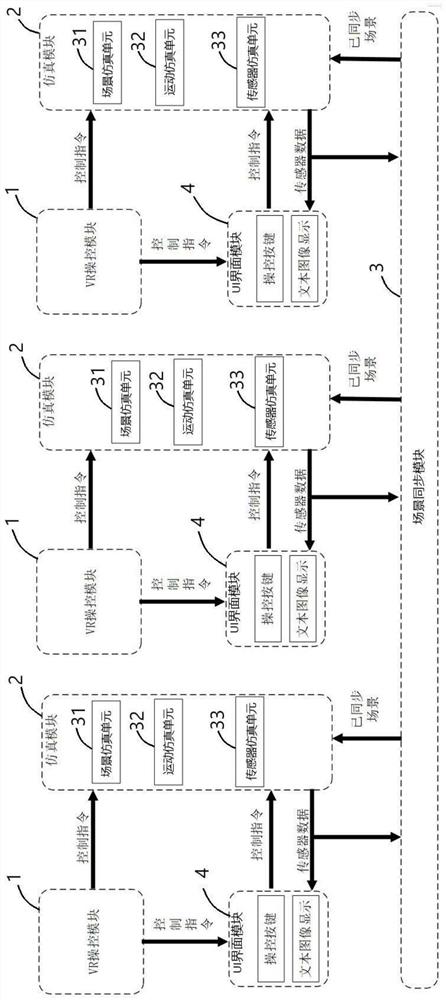
图1是本发明实施例提供的系统架构示意图。
图2是本发明实施例提供的Oculus Quest左右操控手柄示意图。
图3是本发明实施例提供的真实操作者手势与虚拟操作者手势匹配示意图。
图4是本发明实施例提供的水下场景示意图。
图5是本发明实施例提供的ROV运动过程示意图。
图6是本发明实施例提供的摄像头采集的托盘局部图像示意图。
图7是本发明实施例提供的控制界面示意图。
图8是本发明实施例提供的状态信息显示示意图。
图9是本发明实施例提供的场景帧同步原理示意图。
图10是本发明实施例提供的硬件连接结构示意图。
图11是本发明实施例提供的仿真系统的运行流程示意图。
具体实施方式
下面结合附图和实施例对本发明进行详细的描述。
如图1所示,本发明实施例提供的多ROV水下协同作业仿真系统包括VR操控模块1、仿真模块2、场景同步模块3和UI界面模块4。被操控的ROV是三维模型,包括ROV本体、机械臂及机械爪。
其中,VR操控模块1、仿真模块2和UI界面模块4同时预设在VR设备5中,可以理解的是,每一台VR设备5中预先设置有VR操控模块1、仿真模块2和UI界面模块4。
VR设备5包括VR系统中的头戴式显示器及图2示出的左右操控手柄,用于控制ROV本体、机械臂及机械爪的运动。如图2所示,下面以图2示出的左右操控手柄为例,对VR设备5上通过操控功能元件输入控制指令的方法进行详细说明。
VR设备5包括左操控手柄和右操控手柄。
左操控手柄具有左手柄本体,通过前倾、后仰、左转、右转左手柄本体,可以相应控制机械臂的上、下、左、右旋转。通过顺时针与逆时针旋转左手柄本体,可以相应控制机械爪顺时针及逆时针旋转。其中,左转和右转指的是绕z轴转动,顺时针及逆时针转动指的是绕x轴转动。需要说明的是,文中的z轴是以ROV质心为原点,z轴正向为ROV竖直向上的坐标轴方向,x轴正向是ROV水平向前的坐标轴方向。
左手柄本体的操控面板上设置有功能元件,比如:第一按键X、第二按键Y和左摇杆51。通过按下第一按键X,能够增加机械爪开度。通过按下第二按键Y,能够减少机械爪开度。通过上、下拨动左摇杆51,能够相应控制机械臂的伸长与缩短。通过左、右拨动左摇杆51,能够相应控制缆绳的伸长与缩短。
右操控手柄具有右手柄本体,通过前倾、后仰、左转、右转右手柄本体,能够相应控制ROV本体所搭载摄像头的上、下、左、右旋转。通过顺时针与逆时针旋转右手柄本体,能够相应控制ROV本体搭载的工具托盘的推出与收回。
右手柄本体的操控面板上设置有功能元件,比如:第三按键A、第四按键B和右摇杆52。通过按下第三按键A,能够控制ROV顺时针转动。通过按下第四按键B,能够控制ROV本体逆时针转动。通过上、下、左、右拨动右摇杆52,能够相应控制ROV本体前后左右四个方向的平移。
所述控制指令执行的持续时间取决于对应所述功能元件状态保持的时长,所述功能原件的操控动作或不同种所述功能原件的组合操控动作预先设置为对应的所述控制指令。
结合图2,下面实施例列举了一种功能原件的一种操控动作或组合操控动作与控制指令之间存在的对应关系。
第一控制按键53的“开启”操控动作与第一按键X的“按下”操控动作组合的所述控制指令为“增加机械爪开度”;
第一控制按键53的“开启”操控动作与第二按键Y的“按下”操控动作组合的所述控制指令为“减少机械爪开度”;
第一控制按键53的“开启”操控动作与左摇杆51的“上拨”操控动作组合的所述控制指令为“机械臂伸长”;
第一控制按键53的“开启”操控动作与左摇杆51的“下拨”操控动作组合的所述控制指令为“机械臂收缩”;
第一控制按键53的“开启”操控动作与左摇杆51的“左拨”操控动作组合的所述控制指令为“缆绳伸长”;
第一控制按键53的“开启”操控动作与左摇杆51的“右拨”操控动作组合的所述控制指令为“缆绳收回”;
第一控制按键53的“开启”操控动作与左手柄本体的“前倾”操控动作组合的所述控制指令为“机械臂向上转动”;
第一控制按键53的“开启”操控动作与左手柄本体的“后倾”操控动作组合的所述控制指令为“机械臂向下转动”;
第一控制按键53的“开启”操控动作与左手柄本体的“左转”操控动作组合的所述控制指令为“机械臂向左转动”;
第一控制按键53的“开启”操控动作与左手柄本体的“右转”操控动作组合的所述控制指令为“机械臂向右转动”;
第一控制按键53的“开启”操控动作与左手柄本体的“右转”操控动作组合的所述控制指令为“机械臂向右转动”;
第一控制按键53的“开启”操控动作、第二控制按键54的“开启”操控动作与左手柄本体的“顺时针转动”操控动作组合的所述控制指令为“机械爪顺时针旋转”;
第一控制按键53的“开启”操控动作、第二控制按键54的“开启”操控动作与所述左手柄本体的“逆时针转动”操控动作组合的所述控制指令为“机械爪逆时针旋转”;
第一控制按键53的“开启”操控动作与第三按键A的“按下”操控动作组合的所述控制指令为“ROV本体顺时针转动”;
第一控制按键53的“开启”操控动作与第四按键B的“按下”操控动作组合的所述控制指令为“ROV本体逆时针转动”;
第一控制按键53的“开启”操控动作与右摇杆52的“上拨”操控动作组合的所述控制指令为“ROV本体向前平移”;
第一控制按键53的“开启”操控动作与右摇杆52的“下拨”操控动作组合的所述控制指令为“ROV本体向后平移”;
第一控制按键53的“开启”操控动作与右摇杆52的“左拨”操控动作组合的所述控制指令为“ROV本体向左平移”;
第一控制按键53的“开启”操控动作与右摇杆52的“右拨”操控动作组合的所述控制指令为“ROV本体向右平移”;
第一控制按键53的“开启”操控动作与右手柄本体的“前倾”操控动作组合的所述控制指令为“摄像头向上转动”;
第一控制按键53的“开启”操控动作与右手柄本体的“后倾”操控动作组合的所述控制指令为“摄像头向下转动”;
第一控制按键53的“开启”操控动作与右手柄本体的“左转”操控动作组合的所述控制指令为“摄像头向左转动”;
第一控制按键53的“开启”操控动作与右手柄本体的“右转”操控动作组合的所述控制指令为“摄像头向右转动”;
第一控制按键53的“开启”操控动作、第二控制按键54的“开启”操控动作与右手柄本体的“顺时针转动”操控动作组合的所述控制指令为“工具托盘推出”;
第一控制按键53的“开启”操控动作、第二控制按键54的“开启”操控动作与所述右手柄本体的“逆时针转动”操控动作组合的所述控制指令为“工具托盘收回”。
上述实施例中给出中的“前”、“后”、“左”、“右”、“上”和“下”分别是以左、右手柄本体的结构进行定义的,显然,手柄本体是长条形,控制面板位于手柄本体的上方,由此可以定义“上”和“下”。临近操控面板所在平面的水平向前的方向为前方,临近手柄本体的手持部位的水平向后的方向为后方,由此可以定义“前”和“后”,进而确定“左”和“右”。
上述实施例是自定义操控动作与控制指令之间的逻辑对应关系的一种实施方式,当然,还可以根据其它的实际需求,进行其它方式的定义,由于篇章有限,在此不再赘述。
通过将VR设备5的功能原件的操控动作所对应的控制指令输入给VR操控模块1,VR操控模块1实时采集操作者双手在VR设备5上通过操控功能元件输入的控制指令以及所述操作者双手的位姿信息,并实时传送至仿真模块2,该位姿信息将与仿真模块中的虚拟双手匹配以使虚拟双手按照操作者双手的位姿信息移动并操作虚拟左右操控手柄上的按键,以还原真实场景下的操作。
图3是真实操作者双手手势与虚拟操作者手势匹配过程示意图。左操控手柄和右操控手柄上带有激光定位设备,该定位系统可以实时捕获操作者双手的位姿信息。所述定位系统将操作者的双手位置信息实时传送至仿真模块,该位姿信息会与仿真模块中的虚拟双手匹配,使得虚拟双手会按照操作者双手的位姿信息移动并操作虚拟左操控手柄和右操控手柄上的功能按键,还原真实场景下的操作。
如图1所示,仿真模块2包括场景仿真单元21、运动仿真单元22和传感器仿真单元23。
场景仿真单元21用于构建并存储供所述操作者通过输入所述控制指令进行选择加载的水下场景模型、ROV和虚拟双手,其中,所述虚拟双手按照所述操作者双手的位姿信息,移动并操作所述UI界面模块4上与所述控制指令相对应的功能按键。
图4是场景仿真单元21生成的水下场景示例示意图。场景仿真单元21生成水下场景的方法包括如下步骤:
步骤a1,采用Blender、3D Studio Max等第三方建模软件在充分考虑模型逼真度的情况下,构建三维的ROV、水下地形、作业对象模型、水下障碍物模型、水下动植物模型、虚拟双手和虚拟左操控手柄和右操控手柄等。
步骤a2,将步骤a1构建好的模型导出为游戏引擎Unity3D可读取的FBX格式。其中,FBX是一种通用的支持主流3D建模软件及Unity 3D的文件格式。
步骤a3,根据ROV的作业任务,选取相关的模型,搭建水下作业场景。
步骤a4,根据ROV作业时所处的水下深度,设置合理的水下光照、水流方向及速度、波浪大小等,以进一步提升场景仿真的真实性。
上述步骤a3和步骤a4限定的操作顺序可以调换,也可以两个步骤同时进行。
运动仿真单元22用于根据所述控制指令、传感器仿真单元23采集到的ROV状态信息,利用动力学模型和运动学模型计算所述ROV的位姿及速度,进而控制所述ROV实施ROV作业。
图5是运动仿真单元22根据控制指令产生的ROV运动过程示例示意图。运动仿真过程中,ROV的运动、形变及其与周围物体的碰撞检测通过物理引擎进行支持。而ROV则是按照输入的控制指令,产生ROV运动,完成ROV动作。
在一个实施例中,“按照输入的控制指令,产生ROV运动,完成ROV动作”的方法具体包括:
步骤b1,根据输入的控制指令,采用下式(1)所示的ROV动力学模型计算ROV的加速度少。其中,式(1)是根据ROV在水下受到的螺旋桨推力、科氏力、向心力、水阻尼力、重力及浮力等作用力,描述出的ROV动力学模型;
其中,
M=M
C=C
τ=fw|w| (10)
其中,m为ROV的质量,I
下表1是上述中部分参数在一个具体实施例预先设定的具体数值。
表1
需要说明的是,上述数值仅为举例,本领域技术人员可以根据实际需求进行设置这些参数的具体数值。
步骤b1,根据计算得到的ROV的加速度
其中,X为ROV任意时刻在惯性坐标系下的位姿,位姿包括ROV的位置坐标和姿态角
其中,O
传感器仿真单元23用于模拟ROV搭载的摄像头、位姿传感器、速度传感器、深度传感器和压力传感器,采集所述ROV及其所处的所述水下场景模型的状态信息及图像信息。传感器仿真单元23将采集到的图像信息及其所处的所述水下场景模型的状态信息及图像信息发送给UI界面模块4和场景同步模块3。同时,传感器仿真单元23采集到的所述ROV状态信息用作运动仿真单元22的动力学模型提供数据输入,以精确计算ROV的运动加速度。
在一个实施例中,传感器仿真单元23的模拟方法具体包括:
步骤c1,根据需要采集的图像信号,确定相机放置的位置,并采用Unity3D自带的相机仿真摄像头。其中,该图像信号包括ROV的机械臂、机械爪、螺旋桨、缆绳收放装置、TMS与ROV连接处的局部图像。例如:图6是传感器仿真单元生成的摄像头采集的托盘局部图像。
步骤c2,通过ROV运动学模型得到ROV位姿及速度的理想值加上高斯噪声,得到位姿传感器及速度传感器的输出值。
步骤c3,根据步骤c3获得的速度传感器的输出值积分,加上高斯噪声,利用深度公式(15)计算深度传感器的输出值:
h(k+1)=h(k)+v(k)t+h
其中,h(k+1)及h(k)分别为ROV在k+1时刻及k的深度,其由深度传感器采集ROV所处深度获得;v(k)为ROV在垂直方向的线速度,由步骤c2获得的速度传感器获得;t为采样周期,h
步骤c4,根据下式(16)所示的液体压力公式,计算得到压力传感器的输出值:
p=ρ
其中,p为ROV所处位置的压力,ρ
上述步骤c2至步骤c4限定的操作顺序可以调换,也可以三个步骤同时进行。
UI界面模块4用于将仿真模块2中的虚拟双手操控所述功能按键、每一ROV分别在所述作业场景中作业的状态信息及图像信息、及所述ROV同步在所述作业场景中协同作业的状态信息及图像信息进行显示。操作者通过VR设备将控制指令发送给仿真模块,或者操作者通过操控手柄点击UI界面中的操控按键将控制指令发送给仿真模块。
图7和图8分别是UI界面模块4提供的控制界面示例示意图及状态信息显示示例示意图。界面上的功能按键可以设置的内容包括螺旋桨推进器功能的开关、各种传感器的开关、状态信息的调取及ROV缆绳的收放,与VR设备5上的功能元件输入的控制指令相对应。界面上可以显示本数据和图像,其中,文本数据包括ROV的位置、姿态、所在海拔、所在深度、运动速度、螺旋桨转速、水流速度及方向及ROV内部电压电流。图像数据包括ROV运动状态、TMS中缆绳收放状态、TMS与ROV的连接状态及水下作业场景。进入UI界面模块之后,采用左右操控手柄的激光射线点击UI界面模块中相关功能按键,可以初始化ROV操作所需参数,这些参数包括ROV推进器使能、照明系统开启、TMS与ROV连接缆绳的断开。
场景同步模块3预设在服务器6中,用于实时接收来自至少一台所述VR设备5选择加载的ROV、同一水下场景模型作为作业场景及控制指令,并将各ROV同步至该作业场景中、以及将在该逻辑帧接收到的各VR设备5的控制指令进行打包,再分发给各VR设备5中的仿真模块2。
每台VR设备5中装载的仿真软件与服务器中的场景同步模块通过TCP进行网络通信,仿真软件与场景同步模块通过Socket保持双向并持续的连接。场景同步模块3采用的具体同步技术为帧同步,仿真软件向场景同步模块发送连接请求后,将ROV、机械臂及机械爪的状态信息发送给场景同步模块,等待场景同步模块将多台VR设备的操作结果同步至同一场景中;同时,仿真软件监听来自场景同步模块发回数据包的端口,实时接收并更新每台VR设备5显示场景中最新的全局状态。
例如:如图9所示,三台VR设备分别向服务器发送操作者的控制指令A、B及C,服务器中的场景同步模块4将在该逻辑帧N接收到的三位操作者的操作,打包为P,并发送给三台VR设备5,每台VR设备5根据P信息进行逻辑计算并UI展示。
图10是本发明的硬件连接示意图,包括VR设备、服务器、视频矩阵及显示大屏。VR设备用于装载并运行仿真软件,发出控制指令及供操作者观看水下场景;服务器用于将三个不同操作者的操作结果实时同步至同一水下场景;视频矩阵用于将多路数据输入转化为多路数据输出;显示大屏分为四个部分,分别对应三个不同操作者的操作结果及同步之后的协同作业场景。
单ROV作业仿真系统工作原理如下:
第一步,运行其中一台VR设备上的仿真软件;第二步,从仿真软件的场景库中选择并加载ROV及水下场景;第三步,操作者通过VR设备配备的手柄及UI界面中的功能按键控制ROV运动;第四步,仿真模块中的运动仿真单元产生ROV、机械臂及机械爪的运动效果;第五步,仿真模块中的传感器仿真单元采集各种状态信息并传送至UI界面模块用以显示。
多ROV协同作业仿真系统工作原理如下:
第一步,运行三台VR设备上的仿真软件;第二步,从仿真软件的场景库中选择并加载ROV及同一水下场景,同时服务器将三台ROV同步至该水下场景中;第三步,操作者通过VR设备配备的手柄及UI界面中的功能按键控制ROV运动;第四步,仿真模块中的运动仿真单元产生ROV、机械臂及机械爪的运动效果;第五步,仿真模块中的传感器仿真单元采集各种状态信息并传送至UI界面模块用以显示。
图11是本发明整套仿真系统的运行流程图。仿真系统运行过程如下:
VR设备、服务器、视频矩阵及显示大屏通电;运行服务器上的场景同步模块,等待接收三台VR设备上的场景数据;三个操作者头戴VR设备并运行VR设备上的仿真软件;操作者通过手柄激光系统在UI界面对系统进行初始化以使能ROV运动;操作者基于头显场景通过手柄操控ROV作业;服务器实时接收来自三台VR设备上的作业场景,进行同步处理并分发给三台VR设备;服务器已同步场景通过视频矩阵在显示大屏上进行显示;仿真系统运行结束。
最后需要指出的是:以上实施例仅用以说明本发明的技术方案,而非对其限制。本领域的普通技术人员应当理解:可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种多ROV水下协同作业仿真系统
- 一种多平台基桩ROV协同作业系统及方法