一种无旁路循环硫化床锅炉水位控制优化方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及一种水位控制优化方法,尤其是一种无旁路循环硫化床锅炉水位控制优化方法。
背景技术
某循环硫化床锅炉工程设计的给水系统采用2台电动定速给水泵,三路给水设计:分别是100%主给水,70%旁路给水,30%副给水,其中的100%和30%给水调节设有自动控制,70%为纯手动控制调节用。由于该机组没有设计旁路系统,采用通过主汽管道上的向空排汽阀及安全阀泄压来保护主蒸汽的压力。由于这两种阀门都装主蒸汽管道上,并且距离汽包比较近,因此在机组负荷有剧烈摆动时,如发生甩负荷、RB等情况下,通过向空排汽阀及安全阀泄压,压力波动比较大,容易导致汽包水位脱离控制而引起锅炉MFT。
发明内容
本发明主要是解决现有技术中存在的不足,提供一种在无旁路设计的循环流化床锅炉汽包水位在甩负荷、RB等恶劣工况下汽包水位控制的方法。
本发明的上述技术问题主要是通过下述技术方案得以解决的:
一种无旁路循环硫化床锅炉水位控制优化方法,按以下步骤进行:
1)、增加启动给水控制调节阀30%与主给水调节阀100%之间的自动切换:
为了能够全程进行自动控制,增加了用主蒸汽流量来控制启动给水控制调节阀与主给水控制调节阀之间的自动切换功能;
当主蒸汽流量大于15%时自动从启动给水控制调节阀切换到主给水控制调节阀,同时水位控制也由单冲量控制切换到三冲量控制;
当主蒸汽流量小于15%时自动切回单冲量控制;
三冲量控制系统与单冲量控制系统之间指令互相跟踪,从而实现了相互之间的无扰切换;
同时设置了手动切换按钮,运行人员可以根据实际运行情况来投切控制方式;
2)、优化PID控制参数:
由于参加了全程的水位自动控制,控制所面对参数的多变性和扰动就增大,原来的单一参数的PID控制满足不了控制要求;
为了能够满足全程自动控制的要求,采用了变参数PID控制来实现全程自动控制目标;
在单冲量控制系统及串级三冲量控制系统的主控制PID参数,采用了设定值与测量值偏差的变参数PID控制,串级三冲量控制系统的副控制器的采用了给水流量及主蒸汽流量修正后的变参数PID控制;
同时为了加快响应速度,对串级三冲量的主控PID及单冲量的PID控制器采用了蒸汽流量函数f(x)模糊控制的前馈补偿;
3)、增加了汽包危急疏水阀的自动控制:
由于该工程设计的是定速电动给水泵,经过变参数优化后的水位控制能满足全程启停的自动控制要求;
为了能够在机组甩负荷的情况下也能自动控制水位,并且保证汽包水位在正常的范围之内,增加了汽包危急疏水阀的自动;
甩负荷发生后由于蒸汽流量减少,主蒸汽压力上升,启动排汽阀调节主蒸汽压力,但是启动排汽阀容量太小,蒸汽压力调节缓慢,压力继续升高,水的汽化作用变慢,汽包水位急剧下降,导致给水量增大,而此时汽包水位还在降低,等压力到了安全阀动作值以后,主蒸汽的压力急剧降低,水汽化作用加剧,引起虚假水位现象,汽包水位急剧上升,虽然给水量已经在减小,但是由于压力突变引起的水位上升量还是很大,很容易到达MFT值;
为了能够保证汽包水位控制在安全范围内,利用汽包的热惯性及水位的动态特性,自动开启汽包危急疏水阀,从底部排放一部份水;
此时由于是从汽包底部放水,对水的汽化效果影响不大,从而能够迅速的降低汽包水位;
等汽包内压力稳定及水汽化作用稳定后,既水位降低到一定值后关闭危急疏水阀,通过正常的给水来控制汽包水位,使汽包水位能控制在正常范围之内。
本发明为一种无旁路循环硫化床锅炉水位控制优化方法,为了不仅能在机组正常稳定运行的时候能够很好的控制汽包水位,满足机组稳定运行的要求,并且能够在特殊工况下也能控制好汽包水位从而实现汽包水位的全程自动控制,对汽包水位控制进行了优化设计。
附图说明
图1是本发明的锅炉汽包简单示意图;
图2是本发明的给水量扰动下汽包水位的动态特性图;
图3是本发明的蒸汽流量扰动下汽包水位的动态特性图;
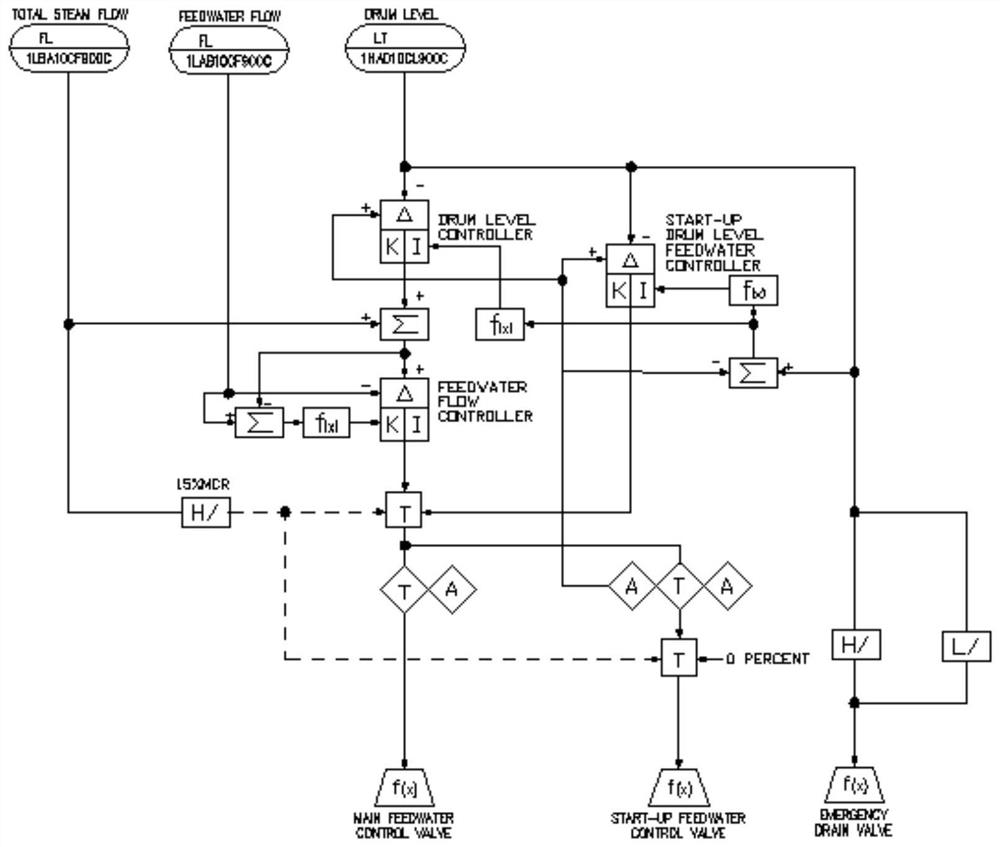
图4是本发明的优化后控制原理图。
附图中:
图1中:w-锅炉给水 D-产生的蒸汽 W1-炉膛下降水量 W2-炉膛上升水量;
图2中:w-给水量 △w-给水变化量 H-水位 t-时间 τ
图3中:D-蒸汽流量 △D-蒸汽变化量 H-汽包水位 τ
图4中:TOTAL STEAM FLOW-总蒸汽流量 FEEDWATER FLOW-总给水流量DRUM LEVEL–汽包水位。
具体实施方式
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
实施例1:如图所示,一种无旁路循环硫化床锅炉水位控制优化方法,按以下步骤进行:
1)、增加启动给水控制调节阀30%与主给水调节阀100%之间的自动切换:
为了能够全程进行自动控制,增加了用主蒸汽流量来控制启动给水控制调节阀与主给水控制调节阀之间的自动切换功能;
当主蒸汽流量大于15%时自动从启动给水控制调节阀切换到主给水控制调节阀,同时水位控制也由单冲量控制切换到三冲量控制;
当主蒸汽流量小于15%时自动切回单冲量控制;
三冲量控制系统与单冲量控制系统之间指令互相跟踪,从而实现了相互之间的无扰切换;
同时设置了手动切换按钮,运行人员可以根据实际运行情况来投切控制方式;
2)、优化PID控制参数:
由于参加了全程的水位自动控制,控制所面对参数的多变性和扰动就增大,原来的单一参数的PID控制满足不了控制要求;
为了能够满足全程自动控制的要求,采用了变参数PID控制来实现全程自动控制目标;
在单冲量控制系统及串级三冲量控制系统的主控制PID参数,采用了设定值与测量值偏差的变参数PID控制,串级三冲量控制系统的副控制器的采用了给水流量及主蒸汽流量修正后的变参数PID控制;
同时为了加快响应速度,对串级三冲量的主控PID及单冲量的PID控制器采用了蒸汽流量函数f(x)模糊控制的前馈补偿;
3)、增加了汽包危急疏水阀的自动控制:
由于该工程设计的是定速电动给水泵,经过变参数优化后的水位控制能满足全程启停的自动控制要求;
为了能够在机组甩负荷的情况下也能自动控制水位,并且保证汽包水位在正常的范围之内,增加了汽包危急疏水阀的自动;
甩负荷发生后由于蒸汽流量减少,主蒸汽压力上升,启动排汽阀调节主蒸汽压力,但是启动排汽阀容量太小,蒸汽压力调节缓慢,压力继续升高,水的汽化作用变慢,汽包水位急剧下降,导致给水量增大,而此时汽包水位还在降低,等压力到了安全阀动作值以后,主蒸汽的压力急剧降低,水汽化作用加剧,引起虚假水位现象,汽包水位急剧上升,虽然给水量已经在减小,但是由于压力突变引起的水位上升量还是很大,很容易到达MFT值;
为了能够保证汽包水位控制在安全范围内,利用汽包的热惯性及水位的动态特性,自动开启汽包危急疏水阀,从底部排放一部份水;
此时由于是从汽包底部放水,对水的汽化效果影响不大,从而能够迅速的降低汽包水位;
等汽包内压力稳定及水汽化作用稳定后,既水位降低到一定值后关闭危急疏水阀,通过正常的给水来控制汽包水位,使汽包水位能控制在正常范围之内。
- 一种无旁路循环硫化床锅炉水位控制优化方法
- 一种基于无旁路汽包水位控制结构