一种模型训练方法及装置
文献发布时间:2023-06-19 11:32:36
技术领域
本申请涉及人工智能领域,尤其涉及一种模型训练方法及装置。
背景技术
人工智能(artificial intelligence,AI)是利用数字计算机或者数字计算机控制的机器模拟、延伸和扩展人的智能,感知环境、获取知识并使用知识获得最佳结果的理论、方法、技术及应用系统。换句话说,人工智能是计算机科学的一个分支,它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式作出反应的智能机器。人工智能也就是研究各种智能机器的设计原理与实现方法,使机器具有感知、推理与决策的功能。
智能手机等终端设备的拍照成像和视频已经有了显著的改善,但是受限于终端设备光学传感器的硬件性能,其拍摄的照片和视频质量仍然不够高,具有高噪声、解析力较低、细节缺失、偏色等问题。同时,受限于图像信号处理器的硬件面积和功耗约束,传统图像处理算法解决上述挑战的难度非常高。为了使得图像或视频的画面质量提高,可以对视频进行处理。
深度学习是近年来人工智能领域发展的一个关键推动力,在计算机视觉的多种任务取得了令人瞩目的效果。在视频处理领域,基于深度学习实现的视频处理模型也取得了业界最佳性能,效果显著的优于传统方法。
移动终端的计算能力较弱,目前用于进行视频处理的模型的结构都十分复杂,对于硬件计算资源要求很高,这些严重限制了神经网络应用到实时性要求高的场景,难以部署到移动终端等弱计算能力的设备。
发明内容
第一方面,本申请提供了一种模型训练方法,所述方法包括:
获取视频样本、第一视频处理网络以及第二视频处理网络,所述第一视频处理网络为老师模型,所述第二视频处理网络为待训练的学生模型;
在一种可能的实现中,视频样本可以包括多个图像帧,第一视频处理网络以及第二视频处理网络用于实现视频增强任务,所谓视频增强任务可以理解为用于增强视频的质量的任务,例如所述视频增强任务可以为视频去噪任务、视频去雾任务、超分辨率任务或高动态范围任务等等,这里并不限定;
通过所述第一视频处理网络和所述第二视频处理网络处理所述视频样本,分别得到所述第一视频处理网络的第一中间特征图输出以及所述第二视频处理网络的第二中间特征图输出;
其中,第一中间特征图输出可以为第一视频处理网络在处理视频样本时中间网络层的特征图输出,第二中间特征图输出可以为第二视频处理网络在处理视频样本时中间网络层的特征图输出,且输出第一中间特征图输出的网络层在第一视频处理网络的位置与输出第二中间特征图输出的网络层在第二视频处理网络的位置相同;
其中,中间网络层可以为第一视频处理网络以及第二视频处理网络中用于输出特征图的网络层,只要输出的特征图可以携带图像帧的图像特征,本申请实施例并不限定中间网络层在第一视频处理网络以及第二视频处理网络的位置以及网络层的类型;
分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理,分别得到第一帧间信息和第二帧间信息,所述第一帧间信息和所述第二帧间信息用于表示所述视频样本的各个图像帧之间的特征变化关系;
在一种实现中,可以通过循环神经网络分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理,其中,由于循环神经网络在处理序列数据时,会对前面的信息进行记忆并应用于当前输出的计算中,因此所述第一帧间信息和所述第二帧间信息可以表示所述视频样本的各个图像帧之间的特征变化关系。具体的,特征变化关系可以指帧间的连续及变化信息,连续信息为帧间静止不动的区域之间的关系,变化信息为帧间存在运动的对象之间的关系;
根据所述第一帧间信息和所述第二帧间信息,确定目标损失,并基于所述目标损失和所述第一视频处理网络,对所述第二视频处理网络进行知识蒸馏,以获取训练后的第二视频处理网络,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异有关。
通过上述方式,在不改变模型结构的前提下,在用于进行知识蒸馏的目标损失中加入了帧间信息,可以将老师模型可以较好的识别出帧间信息,并利用帧间信息进行视频处理的能力迁移至学生模型,提高了知识蒸馏后的学生模型进行视频处理后得到的视频的视频质量。
在一种可能的实现中,所述分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理,包括:
通过循环神经网络分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理。
在一种可能的实现中,所述第一帧间信息和所述第二帧间信息为所述循环神经网络的隐层状态(hidden state)。
在一种可能的实现中,所述视频样本包括多帧图像,所述第一中间特征图输出包括所述多帧图像中每帧图像对应的第一子中间特征图,所述第二中间特征图输出包括所述多帧图像中每帧图像对应的第二子中间特征图,所述第一帧间信息包括所述循环神经网络对所述多帧图像中靠后的M帧图像对应的第一子中间特征图进行处理得到的M个隐层状态,所述第二帧间信息为所述循环神经网络对所述多帧图像中靠后的M帧图像对应的第二子中间特征图进行处理得到的M个隐层状态。
在一种实现中,也可以获取到LSTM输出的隐层状态,也就是通过LSTM分别对第一视频处理网络输出的所述第一中间特征图输出以及第二视频处理网络输出的所述第二中间特征图输出进行处理,分别得到第一隐层状态和第二隐层状态,其中,第一隐层状态可以是LSTM在处理第一中间特征图输出时的全部隐层状态或者部分隐层状态;
在一种可能的实现中,所述循环神经网络为长短期记忆LSTM网络,所述第一帧间信息和所述第二帧间信息为所述LSTM输出的细胞状态(cell state)。
在一种可能的实现中,所述视频样本包括多帧图像,所述第一中间特征图输出包括所述多帧图像中每帧图像对应的第一子中间特征图,所述第二中间特征图输出包括所述多帧图像中每帧图像对应的第二子中间特征图,所述第一帧间信息为所述LSTM网络对所述多帧图像中最后一帧图像对应的第一子中间特征图进行处理得到的细胞状态,所述第二帧间信息为所述LSTM网络对所述多帧图像中最后一帧图像对应的第二子中间特征图进行处理得到的细胞状态。
其中,LSTM网络可以对输入的图像帧依次进行处理,得到每个图像帧对应的细胞状态,而LSTM网络通常在处理靠后的图像帧得到的隐层输出中可以携带更多的帧间信息,因此为了降低计算量,可以选择RNN处理多帧图像中靠后的图像帧对应的中间特征图得到的细胞状态。
在一种可能的实现中,所述视频样本包括多帧图像,所述第一中间特征图输出包括所述多帧图像中每帧图像对应的第一子中间特征图,所述第二中间特征图输出包括所述多帧图像中每帧图像对应的第二子中间特征图,所述方法还包括:
对每个所述第一子中间特征图和每个所述第二子中间特征图进行处理,以得到每个所述第一子中间特征图的第一空间信息以及每个所述第二子中间特征图的第二空间信息,所述第一空间信息和所述第二空间信息用于表示特征图的特征分布;
所述根据所述第一帧间信息和所述第二帧间信息,确定目标损失,包括:
根据所述第一帧间信息和所述第二帧间信息、以及所述第一空间信息和所述第二空间信息,确定目标损失,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异,以及所述第一空间信息和所述第二空间信息之间的差异有关。
在一种实现中,目标损失除了与第一帧间信息和第二帧间信息之间的差异有关之外,还可以与第一中间特征图输出和第二中间特征图输出的空间信息之间的差异有关;其中,空间信息用于表示特征图的特征分布,特征分布可以包括丰富的图像内容并表示对应图像帧的图像特征,例如频率特征、纹理细节特征等等。
在一种可能的实现中,所述第一空间信息为第一空间注意力图,所述第二空间信息为第二空间注意力图,所述对每个所述第一子中间特征图和每个所述第二子中间特征图进行信息统计,包括:
基于空间注意力机制,分别对所述第一中间特征图输出和所述第二中间特征图输出进行映射,分别得到所述第一空间注意力图和所述第二空间注意力图。
在一种可选的实现中,可以对每个第一子中间特征图按通道求平均,以得到第一空间信息,对每个第二子中间特征图按通道求平均,以得到第二空间信息,在信息统计为按通道求平均的情况下,空间信息也可以称之为空间注意力图。
在一种可能的实现中,所述通过所述第一视频处理网络和所述第二视频处理网络处理所述视频样本,包括:
通过所述第一视频处理网络和所述第二视频处理网络处理所述视频样本,分别得到所述第一视频处理网络的第一中间特征图输出、所述第一视频处理网络输出的第一增强视频以及所述第二视频处理网络的第二中间特征图输出;
所述根据所述第一帧间信息和所述第二帧间信息,确定目标损失,包括:
获取所述视频样本对应的真值(ground truth);
根据所述第一帧间信息和所述第二帧间信息、以及所述第一视频处理结果和所述真值,确定目标损失,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异,以及所述第一视频处理结果和所述真值之间的差异有关。
在一种实现中,目标损失除了与第一帧间信息和第二帧间信息之间的差异有关之外,还可以与第一视频处理结果和视频样本对应的真值(ground truth)之间的差异有关,以第一视频处理网络和第二视频处理网络用于实现视频增强任务为例,所谓视频样本对应的真值(ground truth)可以理解为提升了视频质量的视频样本,在一种实现中,视频样本对应的真值(ground truth)也可以是预先设置的,或者是通过第一视频处理网络对视频样本进行图像增强后得到的,这里并不限定;在一种实现中,可以基于所述第一帧间信息和所述第二帧间信息之间的差异、所述第一空间信息和所述第二空间信息之间的差异、以及第一视频处理结果和视频样本对应的真值(ground truth)之间的差异,来构建目标损失。
在一种可能的实现中,所述第一视频处理网络以及所述第二视频处理网络用于实现视频增强任务。
在一种可能的实现中,所述视频增强任务为视频去噪任务、视频去雾任务、超分辨率任务、或高动态范围任务。
在一种可能的实现中,所述分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理之前,所述方法还包括:
分别对所述第一中间特征图和所述第二中间特征图进行去模糊处理,以得到去模糊处理后的所述第一中间特征图和去模糊处理后的所述第二中间特征图;
所述通过循环神经网络分别对所述第一中间特征图和所述第二中间特征图进行处理,包括:
通过循环神经网络分别对所述去模糊处理后的所述第一中间特征图和去模糊处理后的所述第二中间特征图进行处理。
第二方面,本申请提供了一种模型训练装置,所述装置包括:
获取模块,用于获取视频样本、第一视频处理网络以及第二视频处理网络,所述第一视频处理网络为老师模型,所述第二视频处理网络为待训练的学生模型;
视频处理模块,用于通过所述第一视频处理网络和所述第二视频处理网络处理所述视频样本,分别得到所述第一视频处理网络的第一中间特征图输出以及所述第二视频处理网络的第二中间特征图输出;
特征图处理模块,用于分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理,分别得到第一帧间信息和第二帧间信息,所述第一帧间信息和所述第二帧间信息用于表示所述视频样本的各个图像帧之间的特征变化关系;
知识蒸馏模块,用于根据所述第一帧间信息和所述第二帧间信息,确定目标损失,并基于所述目标损失和所述第一视频处理网络,对所述第二视频处理网络进行知识蒸馏,以获取训练后的第二视频处理网络,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异有关。
在一种可能的实现中,所述特征图处理模块,用于通过循环神经网络分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理。
在一种可能的实现中,所述第一帧间信息和所述第二帧间信息为所述循环神经网络的隐层状态(hidden state)。
在一种可能的实现中,所述循环神经网络为长短期记忆LSTM网络,所述第一帧间信息和所述第二帧间信息为所述LSTM输出的细胞状态。
在一种可能的实现中,所述视频样本包括多帧图像,所述第一中间特征图输出包括所述多帧图像中每帧图像对应的第一子中间特征图,所述第二中间特征图输出包括所述多帧图像中每帧图像对应的第二子中间特征图,所述第一帧间信息为所述LSTM网络对所述多帧图像中最后一帧图像对应的第一子中间特征图进行处理得到的细胞状态,所述第二帧间信息为所述LSTM网络对所述多帧图像中最后一帧图像对应的第二子中间特征图进行处理得到的细胞状态。
在一种可能的实现中,所述视频样本包括多帧图像,所述第一中间特征图输出包括所述多帧图像中每帧图像对应的第一子中间特征图,所述第二中间特征图输出包括所述多帧图像中每帧图像对应的第二子中间特征图,所述装置还包括:
信息统计模块,用于对每个所述第一子中间特征图和每个所述第二子中间特征图进行处理,以得到每个所述第一子中间特征图的第一空间信息以及每个所述第二子中间特征图的第二空间信息,所述第一空间信息和所述第二空间信息用于表示特征图的特征分布;
所述知识蒸馏模块,用于根据所述第一帧间信息和所述第二帧间信息、以及所述第一空间信息和所述第二空间信息,确定目标损失,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异,以及所述第一空间信息和所述第二空间信息之间的差异有关。
在一种可能的实现中,所述第一空间信息为第一空间注意力图,所述第二空间信息为第二空间注意力图,所述信息统计模块,用于基于空间注意力机制,分别对所述第一中间特征图输出和所述第二中间特征图输出进行映射,分别得到所述第一空间注意力图和所述第二空间注意力图。
在一种可能的实现中,所述视频处理模块,用于通过所述第一视频处理网络和所述第二视频处理网络处理所述视频样本,分别得到所述第一视频处理网络的第一中间特征图输出、所述第一视频处理网络输出的第一视频处理结果以及所述第二视频处理网络的第二中间特征图输出;
所述知识蒸馏模块,用于获取所述视频样本对应的真值(ground truth);根据所述第一帧间信息和所述第二帧间信息、以及所述第一视频处理结果和所述真值,确定目标损失,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异,以及所述第一视频处理结果和所述真值之间的差异有关。
在一种可能的实现中,所述第一视频处理网络以及所述第二视频处理网络用于实现视频增强任务。
在一种可能的实现中,所述视频增强任务为视频去噪任务、视频去雾任务、超分辨率任务、或高动态范围任务。
在一种可能的实现中,所述装置还包括:去模糊模块,用于在所述通过循环神经网络分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理之前,分别对所述第一中间特征图和所述第二中间特征图进行去模糊处理,以得到去模糊处理后的所述第一中间特征图和去模糊处理后的所述第二中间特征图;
所述特征图处理模块,用于通过循环神经网络分别对所述去模糊处理后的所述第一中间特征图和去模糊处理后的所述第二中间特征图进行处理。
第三方面,本申请实施例提供了一种模型训练装置,可以包括存储器、处理器以及总线系统,其中,存储器用于存储程序,处理器用于执行存储器中的程序,以执行如上述第一方面任一可选的方法。
第四方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,当其在计算机上运行时,使得计算机执行如上述第一方面任一可选的方法。
第五方面,本申请实施例提供了一种计算机程序,包括代码,当代码被执行时,用于实现上述第一方面任一可选的方法。
第六方面,本申请提供了一种芯片系统,该芯片系统包括处理器,用于支持执行设备或训练设备实现上述方面中所涉及的功能,例如,发送或处理上述方法中所涉及的数据;或,信息。在一种可能的设计中,所述芯片系统还包括存储器,所述存储器,用于保存执行设备或训练设备必要的程序指令和数据。该芯片系统,可以由芯片构成,也可以包括芯片和其他分立器件。
本申请实施例提供了一种模型训练方法,所述方法包括:获取视频样本、第一视频处理网络以及第二视频处理网络,所述第一视频处理网络为老师模型,所述第二视频处理网络为待训练的学生模型;通过所述第一视频处理网络和所述第二视频处理网络处理所述视频样本,分别得到所述第一视频处理网络的第一中间特征图输出以及所述第二视频处理网络的第二中间特征图输出;通过循环神经网络分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理,分别得到第一帧间信息和第二帧间信息,所述第一帧间信息和所述第二帧间信息用于表示所述视频样本的各个图像帧之间的特征变化关系;根据所述第一帧间信息和所述第二帧间信息,确定目标损失,并基于所述目标损失和所述第一视频处理网络,对所述第二视频处理网络进行知识蒸馏,以获取训练后的第二视频处理网络,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异有关。通过上述方式,在不改变模型结构的前提下,在用于进行知识蒸馏的目标损失中加入了帧间信息,可以将老师模型可以较好的识别出帧间信息,并利用帧间信息进行视频处理的能力迁移至学生模型,提高了知识蒸馏后的学生模型进行视频处理后得到的视频的视频质量。
附图说明
图1为人工智能主体框架的一种结构示意图;
图2为本申请实施例提供的一种应用场景的示意图;
图3为本申请实施例提供的一种应用场景的示意图;
图4为本申请实施例提供的卷积神经网络的示意图;
图5为本申请实施例提供的卷积神经网络的示意图;
图6为本申请实施例提供的一种系统的结构示意;
图7为本申请实施例提供的一种芯片的结构示意;
图8为本申请实施例提供的一种模型训练方法的示意;
图9为本申请实施例提供的一种视频增强网络的示意;
图10为本申请实施例提供的一种超分辨率网络的示意;
图11为本申请实施例的一种RNN的结构示意;
图12为本申请实施例的一种RNN的结构示意;
图13为本申请实施例的一种RNN的结构示意;
图14为本申请实施例提供的一种模型训练方法的示意;
图15为本申请实施例提供的一种模型训练方法的示意;
图16至图19为本申请实施例提供的一种模型训练方法的效果示意;
图20为本申请实施例提供的一种模型训练装置的示意;
图21为本申请实施例提供的执行设备的一种结构示意图;
图22为本申请实施例提供的训练设备一种结构示意图。
具体实施方式
下面结合本发明实施例中的附图对本发明实施例进行描述。本发明的实施方式部分使用的术语仅用于对本发明的具体实施例进行解释,而非旨在限定本发明。
下面结合附图,对本申请的实施例进行描述。本领域普通技术人员可知,随着技术的发展和新场景的出现,本申请实施例提供的技术方案对于类似的技术问题,同样适用。
本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的术语在适当情况下可以互换,这仅仅是描述本申请的实施例中对相同属性的对象在描述时所采用的区分方式。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,以便包含一系列单元的过程、方法、系统、产品或设备不必限于那些单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它单元。
首先对人工智能系统总体工作流程进行描述,请参见图1,图1示出的为人工智能主体框架的一种结构示意图,下面从“智能信息链”(水平轴)和“IT价值链”(垂直轴)两个维度对上述人工智能主题框架进行阐述。其中,“智能信息链”反映从数据的获取到处理的一列过程。举例来说,可以是智能信息感知、智能信息表示与形成、智能推理、智能决策、智能执行与输出的一般过程。在这个过程中,数据经历了“数据—信息—知识—智慧”的凝练过程。“IT价值链”从人智能的底层基础设施、信息(提供和处理技术实现)到系统的产业生态过程,反映人工智能为信息技术产业带来的价值。
(1)基础设施
基础设施为人工智能系统提供计算能力支持,实现与外部世界的沟通,并通过基础平台实现支撑。通过传感器与外部沟通;计算能力由智能芯片,如中央处理器(centralprocessing unit,CPU)、网络处理器(neural-network processing unit,NPU)、图形处理器(英语:graphics processing unit,GPU)、专用集成电路(application specificintegrated circuit,ASIC)或现场可编程逻辑门阵列(field programmable gate array,FPGA)等硬件加速芯片)提供;基础平台包括分布式计算框架及网络等相关的平台保障和支持,可以包括云存储和计算、互联互通网络等。举例来说,传感器和外部沟通获取数据,这些数据提供给基础平台提供的分布式计算系统中的智能芯片进行计算。
(2)数据
基础设施的上一层的数据用于表示人工智能领域的数据来源。数据涉及到图形、图像、语音、文本,还涉及到传统设备的物联网数据,包括已有系统的业务数据以及力、位移、液位、温度、湿度等感知数据。
(3)数据处理
数据处理通常包括数据训练,机器学习,深度学习,搜索,推理,决策等方式。
其中,机器学习和深度学习可以对数据进行符号化和形式化的智能信息建模、抽取、预处理、训练等。
推理是指在计算机或智能系统中,模拟人类的智能推理方式,依据推理控制策略,利用形式化的信息进行机器思维和求解问题的过程,典型的功能是搜索与匹配。
决策是指智能信息经过推理后进行决策的过程,通常提供分类、排序、预测等功能。
(4)通用能力
对数据经过上面提到的数据处理后,进一步基于数据处理的结果可以形成一些通用的能力,比如可以是算法或者一个通用系统,例如,翻译,文本的分析,计算机视觉的处理,语音识别,图像的识别等等。
(5)智能产品及行业应用
智能产品及行业应用指人工智能系统在各领域的产品和应用,是对人工智能整体解决方案的封装,将智能信息决策产品化、实现落地应用,其应用领域主要包括:智能终端、智能交通、智能医疗、自动驾驶、智能城市等。
本申请实施例提供的模型训练方法,具体可以应用于数据训练、机器学习、深度学习等数据处理方法,对训练数据进行符号化和形式化的智能信息建模、抽取、预处理、训练等,最终得到训练好的神经网络模型(如本申请实施例中的训练后的第二视频处理网络);并且训练后的第二视频处理网络可以用于进行模型推理,具体可以将视频输入到训练后的第二视频处理网络中,得到视频处理结果。
本申请实施例提供的训练后的第二视频处理网络可以应用在辅助驾驶、自动驾驶的智能车中,也可应用在智慧城市、智能终端等计算机视觉领域中的需要进行视频增强的领域。示例性的,本申请的技术方案能够应用在视频流传输场景以及视频监控场景中。下面分别结合图2和图3对视频流传输场景和视频监控场景进行简单的介绍。
视频流传输场景:
例如,在使用智能终端(例如,手机、车、机器人、平板电脑、台式电脑、智能手表、虚拟现实VR、增强现实AR设备等等中)的客户端播放视频时,为了减少视频流的带宽需求,服务器可以通过网络向客户端传输经过下采样的、分辨率较低的低质量视频流。然后客户端可以利用训练后的第二视频处理网络对该低质量视频流中的图像进行增强。例如,对视频中的图像进行超分辨率、降噪等操作,最后向用户呈现高质量的图像。
视频监控场景:
在安防领域中,受限于监控相机安装位置、有限的存储空间等不利条件,部分视频监控的图像质量较差,这样会影响人或识别算法识别目标的准确性。因此,可以利用本申请实施例提供的训练后的第二视频处理网络将低质量的视频监控视频转化为高质量的高清视频,从而实现对监控图像中大量细节的有效恢复,为后续的目标识别任务提供更有效、更丰富的信息。
由于本申请实施例涉及大量神经网络的应用,为了便于理解,下面先对本申请实施例涉及的相关术语及神经网络等相关概念进行介绍。
(1)神经网络
神经网络可以是由神经单元组成的,神经单元可以是指以xs(即输入数据)和截距1为输入的运算单元,该运算单元的输出可以为:
其中,s=1、2、……n,n为大于1的自然数,Ws为xs的权重,b为神经单元的偏置。f为神经单元的激活函数(activation functions),用于将非线性特性引入神经网络中,来将神经单元中的输入信号转换为输出信号。该激活函数的输出信号可以作为下一层卷积层的输入,激活函数可以是sigmoid函数。神经网络是将多个上述单一的神经单元联结在一起形成的网络,即一个神经单元的输出可以是另一个神经单元的输入。每个神经单元的输入可以与前一层的局部接受域相连,来提取局部接受域的特征,局部接受域可以是由若干个神经单元组成的区域。
(2)卷积神经网络(convolutional neuron network,CNN)是一种带有卷积结构的深度神经网络。卷积神经网络包含了一个由卷积层和子采样层构成的特征抽取器,该特征抽取器可以看作是滤波器。卷积层是指卷积神经网络中对输入信号进行卷积处理的神经元层。在卷积神经网络的卷积层中,一个神经元可以只与部分邻层神经元连接。一个卷积层中,通常包含若干个特征平面,每个特征平面可以由一些矩形排列的神经单元组成。同一特征平面的神经单元共享权重,这里共享的权重就是卷积核。共享权重可以理解为提取特征的方式与位置无关。卷积核可以以随机大小的矩阵的形式化,在卷积神经网络的训练过程中卷积核可以通过学习得到合理的权重。另外,共享权重带来的直接好处是减少卷积神经网络各层之间的连接,同时又降低了过拟合的风险。
CNN是一种非常常见的神经网络,下面结合图4重点对CNN的结构进行详细的介绍。如前文的基础概念介绍所述,卷积神经网络是一种带有卷积结构的深度神经网络,是一种深度学习(deep learning)架构,深度学习架构是指通过机器学习的算法,在不同的抽象层级上进行多个层次的学习。作为一种深度学习架构,CNN是一种前馈(feed-forward)人工神经网络,该前馈人工神经网络中的各个神经元可以对输入其中的图像作出响应。
如图4所示,卷积神经网络(CNN)200可以包括输入层210,卷积层/池化层220(其中池化层为可选的),以及全连接层(fully connected layer)230。
卷积层/池化层220:
卷积层:
如图4所示卷积层/池化层220可以包括如示例221-226层,举例来说:在一种实现中,221层为卷积层,222层为池化层,223层为卷积层,224层为池化层,225为卷积层,226为池化层;在另一种实现方式中,221、222为卷积层,223为池化层,224、225为卷积层,226为池化层。即卷积层的输出可以作为随后的池化层的输入,也可以作为另一个卷积层的输入以继续进行卷积操作。
下面将以卷积层221为例,介绍一层卷积层的内部工作原理。
卷积层221可以包括很多个卷积算子,卷积算子也称为核,其在图像处理中的作用相当于一个从输入图像矩阵中提取特定信息的过滤器,卷积算子本质上可以是一个权重矩阵,这个权重矩阵通常被预先定义,在对图像进行卷积操作的过程中,权重矩阵通常在输入图像上沿着水平方向一个像素接着一个像素(或两个像素接着两个像素……这取决于步长stride的取值)的进行处理,从而完成从图像中提取特定特征的工作。该权重矩阵的大小应该与图像的大小相关,需要注意的是,权重矩阵的纵深维度(depth dimension)和输入图像的纵深维度是相同的,在进行卷积运算的过程中,权重矩阵会延伸到输入图像的整个深度。因此,和一个单一的权重矩阵进行卷积会产生一个单一纵深维度的卷积化输出,但是大多数情况下不使用单一权重矩阵,而是应用多个尺寸(行×列)相同的权重矩阵,即多个同型矩阵。每个权重矩阵的输出被堆叠起来形成卷积图像的纵深维度,这里的维度可以理解为由上面所述的“多个”来决定。不同的权重矩阵可以用来提取图像中不同的特征,例如一个权重矩阵用来提取图像边缘信息,另一个权重矩阵用来提取图像的特定颜色,又一个权重矩阵用来对图像中不需要的噪点进行模糊化等。该多个权重矩阵尺寸(行×列)相同,经过该多个尺寸相同的权重矩阵提取后的特征图的尺寸也相同,再将提取到的多个尺寸相同的特征图合并形成卷积运算的输出。
这些权重矩阵中的权重值在实际应用中需要经过大量的训练得到,通过训练得到的权重值形成的各个权重矩阵可以用来从输入图像中提取信息,从而使得卷积神经网络200进行正确的预测。
当卷积神经网络200有多个卷积层的时候,初始的卷积层(例如221)往往提取较多的一般特征,该一般特征也可以称之为低级别的特征;随着卷积神经网络200深度的加深,越往后的卷积层(例如226)提取到的特征越来越复杂,比如高级别的语义之类的特征,语义越高的特征越适用于待解决的问题。
池化层:
由于常常需要减少训练参数的数量,因此卷积层之后常常需要周期性的引入池化层,在如图4中220所示例的221-226各层,可以是一层卷积层后面跟一层池化层,也可以是多层卷积层后面接一层或多层池化层。在图像处理过程中,池化层的唯一目的就是减少图像的空间大小。池化层可以包括平均池化算子和/或最大池化算子,以用于对输入图像进行采样得到较小尺寸的图像。平均池化算子可以在特定范围内对图像中的像素值进行计算产生平均值作为平均池化的结果。最大池化算子可以在特定范围内取该范围内值最大的像素作为最大池化的结果。另外,就像卷积层中用权重矩阵的大小应该与图像尺寸相关一样,池化层中的运算符也应该与图像的大小相关。通过池化层处理后输出的图像尺寸可以小于输入池化层的图像的尺寸,池化层输出的图像中每个像素点表示输入池化层的图像的对应子区域的平均值或最大值。
全连接层230:
在经过卷积层/池化层220的处理后,卷积神经网络200还不足以输出所需要的输出信息。因为如前所述,卷积层/池化层220只会提取特征,并减少输入图像带来的参数。然而为了生成最终的输出信息(所需要的类信息或其他相关信息),卷积神经网络200需要利用全连接层230来生成一个或者一组所需要的类的数量的输出。因此,在全连接层230中可以包括多层隐含层(如图4所示的231、232至23n),该多层隐含层中所包含的参数可以根据具体的任务类型的相关训练数据进行预先训练得到,例如该任务类型可以包括图像识别,图像分类,图像超分辨率重建等等……
在全连接层230中的多层隐含层之后,也就是整个卷积神经网络200的最后层为输出层240,该输出层240具有类似分类交叉熵的损失函数,具体用于计算预测误差,一旦整个卷积神经网络200的前向传播(如图4由210至240方向的传播为前向传播)完成,反向传播(如图4由240至210方向的传播为反向传播)就会开始更新前面提到的各层的权重值以及偏差,以减少卷积神经网络200的损失,及卷积神经网络200通过输出层输出的结果和理想结果之间的误差。
需要说明的是,如图4所示的卷积神经网络200仅作为一种卷积神经网络的示例,在具体的应用中,卷积神经网络还可以以其他网络模型的形式存在,例如,仅包括图4中所示的网络结构的一部分,比如,本申请实施例中所采用的卷积神经网络可以仅包括输入层210、卷积层/池化层220和输出层240。
需要说明的是,如图4所示的卷积神经网络100仅作为一种卷积神经网络的示例,在具体的应用中,卷积神经网络还可以以其他网络模型的形式存在,例如,如图5所示的多个卷积层/池化层并行,将分别提取的特征均输入给全连接层230进行处理。
(3)深度神经网络
深度神经网络(Deep Neural Network,DNN),也称多层神经网络,可以理解为具有很多层隐含层的神经网络,这里的“很多”并没有特别的度量标准。从DNN按不同层的位置划分,DNN内部的神经网络可以分为三类:输入层,隐含层,输出层。一般来说第一层是输入层,最后一层是输出层,中间的层数都是隐含层。层与层之间是全连接的,也就是说,第i层的任意一个神经元一定与第i+1层的任意一个神经元相连。虽然DNN看起来很复杂,但是就每一层的工作来说,其实并不复杂,简单来说就是如下线性关系表达式:
(4)损失函数
在训练深度神经网络的过程中,因为希望深度神经网络的输出尽可能的接近真正想要预测的值,所以可以通过比较当前网络的预测值和真正想要的目标值,再根据两者之间的差异情况来更新每一层神经网络的权重向量(当然,在第一次更新之前通常会有初始化的过程,即为深度神经网络中的各层预先配置参数),比如,如果网络的预测值高了,就调整权重向量让它预测低一些,不断的调整,直到深度神经网络能够预测出真正想要的目标值或与真正想要的目标值非常接近的值。因此,就需要预先定义“如何比较预测值和目标值之间的差异”,这便是损失函数(loss function)或目标函数(objective function),它们是用于衡量预测值和目标值的差异的重要方程。其中,以损失函数举例,损失函数的输出值(loss)越高表示差异越大,那么深度神经网络的训练就变成了尽可能缩小这个loss的过程。
(5)反向传播算法
卷积神经网络可以采用误差反向传播(back propagation,BP)算法在训练过程中修正初始的超分辨率模型中参数的大小,使得超分辨率模型的重建误差损失越来越小。具体地,前向传递输入信号直至输出会产生误差损失,通过反向传播误差损失信息来更新初始的超分辨率模型中参数,从而使误差损失收敛。反向传播算法是以误差损失为主导的反向传播运动,旨在得到最优的超分辨率模型的参数,例如权重矩阵。
(6)循环神经网络(RNN,Recurrent Neural Networks)是用来处理序列数据的。在传统的神经网络模型中,是从输入层到隐含层再到输出层,层与层之间是全连接的,而对于每一层层内之间的各个节点是无连接的。这种普通的神经网络虽然解决了很多难题,但是却仍然对很多问题却无能无力。例如,你要预测句子的下一个单词是什么,一般需要用到前面的单词,因为一个句子中前后单词并不是独立的。RNN之所以称为循环神经网路,即一个序列当前的输出与前面的输出也有关。具体的表现形式为网络会对前面的信息进行记忆并应用于当前输出的计算中,即隐含层本层之间的节点不再无连接而是有连接的,并且隐含层的输入不仅包括输入层的输出还包括上一时刻隐含层的输出。理论上,RNN能够对任何长度的序列数据进行处理。对于RNN的训练和对传统的CNN或DNN的训练一样。同样使用误差反向传播算法,不过有一点区别:即,如果将RNN进行网络展开,那么其中的参数,如W,是共享的;而如上举例上述的传统神经网络却不是这样。并且在使用梯度下降算法中,每一步的输出不仅依赖当前步的网络,还依赖前面若干步网络的状态。该学习算法称为基于时间的反向传播算法Back propagation Through Time(BPTT)。
既然已经有了卷积神经网络,为什么还要循环神经网络?原因很简单,在卷积神经网络中,有一个前提假设是:元素之间是相互独立的,输入与输出也是独立的,比如猫和狗。但现实世界中,很多元素都是相互连接的,比如股票随时间的变化,再比如一个人说了:我喜欢旅游,其中最喜欢的地方是云南,以后有机会一定要去。这里填空,人类应该都知道是填“云南”。因为人类会根据上下文的内容进行推断,但如何让机器做到这一步?RNN就应运而生了。RNN旨在让机器像人一样拥有记忆的能力。因此,RNN的输出就需要依赖当前的输入信息和历史的记忆信息。
(7)像素值
图像的像素值可以是一个红绿蓝(RGB)颜色值,像素值可以是表示颜色的长整数。例如,像素值为256*Red+100*Green+76Blue,其中,Blue代表蓝色分量,Green代表绿色分量,Red代表红色分量。各个颜色分量中,数值越小,亮度越低,数值越大,亮度越高。对于灰度图像来说,像素值可以是灰度值。
(8)超分辨率
超分辨率(Super Resolution,SR)是一种图像增强技术,给定一张或一组低分辨率的图像,通过学习图像的先验知识、图像本身的相似性、多帧图像信息互补等手段恢复图像的高频细节信息,生成较高分辨率的目标图像。超分辨率在应用中,按照输入图像的数量,可分为单帧图像超分辨率和视频超分辨率。超分辨率在高清电视、监控设备、卫星图像和医学影像等领域有重要的应用价值。
(9)视频超分辨率
视频超分辨率(video super resolution,VSR)是一种针对视频进行处理的增强技术,其目的是将低分辨率的视频转化成高质量的高分辨率视频。按照输入的帧数,视频超分辨率可以分为多帧视频超分辨率和循环视频超分辨率。
本申请提供的图像处理方法可以应用于视频直播、视频通话、相册管理、智慧城市、人机交互以及其他需要涉及到视频数据等的场景。
(10)降噪
图像在数字化和传输过程中常受到成像设备与外部环境的影响,导致图像包含噪声。减少图像中噪声的过程称为图像降噪,有时候也可称为图像去噪。
(11)图像特征
图像特征主要有图像的颜色特征、纹理特征、形状特征和空间关系特征等。
颜色特征是一种全局特征,描述了图像或图像区域所对应的景物的表面性质;一般颜色特征是基于像素点的特征,此时所有属于图像或图像区域的像素都有各自的贡献。由于颜色对图像或图像区域的方向、大小等变化不敏感,所以颜色特征不能很好地捕捉图像中对象的局部特征。
纹理特征也是一种全局特征,它也描述了图像或图像区域所对应景物的表面性质;但由于纹理只是一种物体表面的特性,并不能完全反映出物体的本质属性,所以仅仅利用纹理特征是无法获得高层次图像内容的。与颜色特征不同,纹理特征不是基于像素点的特征,它需要在包含多个像素点的区域中进行统计计算。
形状特征有两类表示方法,一类是轮廓特征,另一类是区域特征,图像的轮廓特征主要针对物体的外边界,而图像的区域特征则关系到整个形状区域。
空间关系特征,是指图像中分割出来的多个目标之间的相互的空间位置或相对方向关系,这些关系也可分为连接/邻接关系、交叠/重叠关系和包含/包容关系等。通常空间位置信息可以分为两类:相对空间位置信息和绝对空间位置信息。前一种关系强调的是目标之间的相对情况,如上下左右关系等,后一种关系强调的是目标之间的距离大小以及方位。
需要说明的,上述列举的图像特征可以作为图像中具有的特征的一些举例,图像还可以具有其他特征,如更高层级的特征:语义特征,此处不再展开。
(12)图像/视频增强
图像/视频增强指的是对图像/视频所做的能够提高成像质量的动作。例如,增强处理包括超分、降噪、锐化或去马赛克等。
下面结合图6对本申请实施例提供的系统架构进行详细的介绍。图6为本申请一实施例提供的系统架构示意图。如图6所示,系统架构500包括执行设备510、训练设备520、数据库530、客户设备540、数据存储系统550以及数据采集系统560。
执行设备510包括计算模块511、I/O接口512、预处理模块513和预处理模块514。计算模块511中可以包括目标模型/规则501,预处理模块513和预处理模块514是可选的。
数据采集设备560用于采集训练数据。本申请实施例中的训练数据包括视频样本以及监督视频(或者称之为真值(ground truth))。其中,视频样本可以为低质量视频,监督视频为在模型训练前预先获取的视频样本对应的高质量视频。视频样本例如可以是低分辨率的视频,监督图像为高分辨率视频;或者,视频样本例如可以是包含雾气或噪声的视频,监督图像为去除了雾气或噪声的视频。在采集到训练数据之后,数据采集设备560将这些训练数据存入数据库530,训练设备520基于数据库530中维护的训练数据训练得到目标模型/规则501。
其中,本申请实施例中,训练设备520基于数据库530中维护的训练数据和老师模型(例如本申请实施例中的第一视频处理模型)对学生模型(例如本申请实施例中的第二视频处理模型)进行知识蒸馏,得到目标模型/规则501(例如本申请实施例中的训练后的第二视频处理模型)。
上述目标模型/规则501能够用于实现视频增强任务,即,将待处理视频输入该目标模型/规则501,即可得到处理后的增强视频。需要说明的是,在实际应用中,数据库530中维护的训练数据不一定都来自于数据采集设备560的采集,也有可能是从其他设备接收得到的。另外需要说明的是,训练设备520也不一定完全基于数据库530维护的训练数据进行目标模型/规则501的训练,也有可能从云端或其他地方获取训练数据进行模型训练,上述描述不应该作为对本申请实施例的限定。
根据训练设备520训练得到的目标模型/规则501可以应用于不同的系统或设备中,如应用于图6所示的执行设备510,所述执行设备510可以是终端,如手机终端,平板电脑,笔记本电脑,增强现实(augmented reality,AR)/虚拟现实(virtual reality,VR)设备,车载终端等,还可以是服务器或者云端等。在图6中,执行设备510配置输入/输出(input/output,I/O)接口512,用于与外部设备进行数据交互,用户可以通过客户设备540向I/O接口512输入数据,所述输入数据在本申请实施例中可以包括:客户设备输入的待处理图像。
预处理模块513和预处理模块514用于根据I/O接口512接收到的输入数据(如待处理视频)进行预处理。应理解,可以没有预处理模块513和预处理模块514或者只有的一个预处理模块。当不存在预处理模块513和预处理模块514时,可以直接采用计算模块511对输入数据进行处理。
在执行设备510对输入数据进行预处理,或者在执行设备510的计算模块511执行计算等相关的处理过程中,执行设备510可以调用数据存储系统550中的数据、代码等以用于相应的处理,也可以将相应处理得到的数据、指令等存入数据存储系统550中。
最后,I/O接口512将处理结果,如处理后得到的增强视频呈现给客户设备540,从而提供给用户。
值得说明的是,训练设备520可以针对不同的目标或称不同的任务,基于不同的训练数据生成相应的目标模型/规则501,该相应的目标模型/规则501即可以用于实现视频增强任务,从而为用户提供所需的结果。
在图6所示情况下,用户可以手动给定输入数据(该输入数据可以是待处理视频),该“手动给定输入数据”可以通过I/O接口512提供的界面进行操作。另一种情况下,客户设备540可以自动地向I/O接口512发送输入数据,如果要求客户设备540自动发送输入数据需要获得用户的授权,则用户可以在客户设备540中设置相应权限。用户可以在客户设备540查看执行设备510输出的结果,具体的呈现形式可以是显示、声音、动作等具体方式。客户设备540也可以作为数据采集端,采集如图所示输入I/O接口512的输入数据及输出I/O接口512的输出结果作为新的样本数据,并存入数据库530。当然,也可以不经过客户设备540进行采集,而是由I/O接口512直接将如图所示输入I/O接口512的输入数据及输出I/O接口512的输出结果,作为新的样本数据存入数据库530。
值得注意的是,图6仅是本申请实施例提供的一种系统架构的示意图,图中所示设备、器件、模块等之间的位置关系不构成任何限制,例如,在图6中,数据存储系统550相对执行设备510是外部存储器,在其它情况下,也可以将数据存储系统550置于执行设备510中。
下面介绍本申请实施例提供的一种芯片硬件结构。
图7为本申请一实施例提供的芯片硬件结构图,该芯片包括神经网络处理器700。该芯片可以被设置在如图6所示的执行设备510中,用以完成计算模块511的计算工作。该芯片也可以被设置在如图6所示的训练设备520中,用以完成训练设备520的训练工作并输出目标模型/规则501。如图6所示的视频处理网络中各层的算法均可在如图7所示的芯片中得以实现。
神经网络处理器(neural processing unit,NPU)700作为协处理器挂载到主中央处理单元(host central processing unit,host CPU)上,由主CPU分配任务。NPU的核心部分为运算电路703,控制器704控制运算电路703提取存储器(权重存储器702或输入存储器701)中的数据并进行运算。
在一些实现中,运算电路703内部包括多个处理单元(process engine,PE)。在一些实现中,运算电路703是二维脉动阵列。运算电路703还可以是一维脉动阵列或者能够执行例如乘法和加法这样的数学运算的其它电子线路。在一些实现中,运算电路703是通用的矩阵处理器。
举例来说,假设有输入矩阵A,权重矩阵B,输出矩阵C。运算电路703从权重存储器702中取矩阵B相应的数据,并缓存在运算电路703中每一个PE上。运算电路703从输入存储器701中取矩阵A数据与矩阵B进行矩阵运算,得到的矩阵的部分结果或最终结果,保存在累加器(accumulator)708中。
向量计算单元707可以对运算电路703的输出做进一步处理,如向量乘,向量加,指数运算,对数运算,大小比较等等。例如,向量计算单元707可以用于神经网络中非卷积/非FC层的网络计算,如池化(pooling),批归一化(batch normalization),局部响应归一化(local response normalization)等。
在一些实现中,向量计算单元707能将经处理的输出的向量存储到统一存储器706。例如,向量计算单元707可以将非线性函数应用到运算电路703的输出,例如累加值的向量,用以生成激活值。在一些实现中,向量计算单元707生成归一化的值、合并值,或二者均有。在一些实现中,处理过的输出的向量能够用作到运算电路703的激活输入,例如用于在神经网络中的后续层中的使用。
统一存储器706用于存放输入数据以及输出数据。
权重数据直接通过存储单元访问控制器(direct memory access controller,DMAC)705将外部存储器中的输入数据搬运到输入存储器701和/或统一存储器706、将外部存储器中的权重数据存入权重存储器702,以及将统一存储器706中的数据存入外部存储器。
总线接口单元(bus interface unit,BIU)710,用于通过总线实现主CPU、DMAC和取指存储器709之间进行交互。
与控制器704连接的取指存储器(instruction fetch buffer)709,用于存储控制器704使用的指令。
控制器704,用于调用取指存储器709中缓存的指令,实现控制该运算加速器的工作过程。
一般地,统一存储器706、输入存储器701、权重存储器702以及取指存储器709均为片上(on-chip)存储器,外部存储器为该NPU外部的存储器,该外部存储器可以为双倍数据率同步动态随机存储器(double data rate synchronous dynamic random accessmemory,DDR SDRAM)、高带宽存储器(high bandwidth memory,HBM)或其他可读可写的存储器。
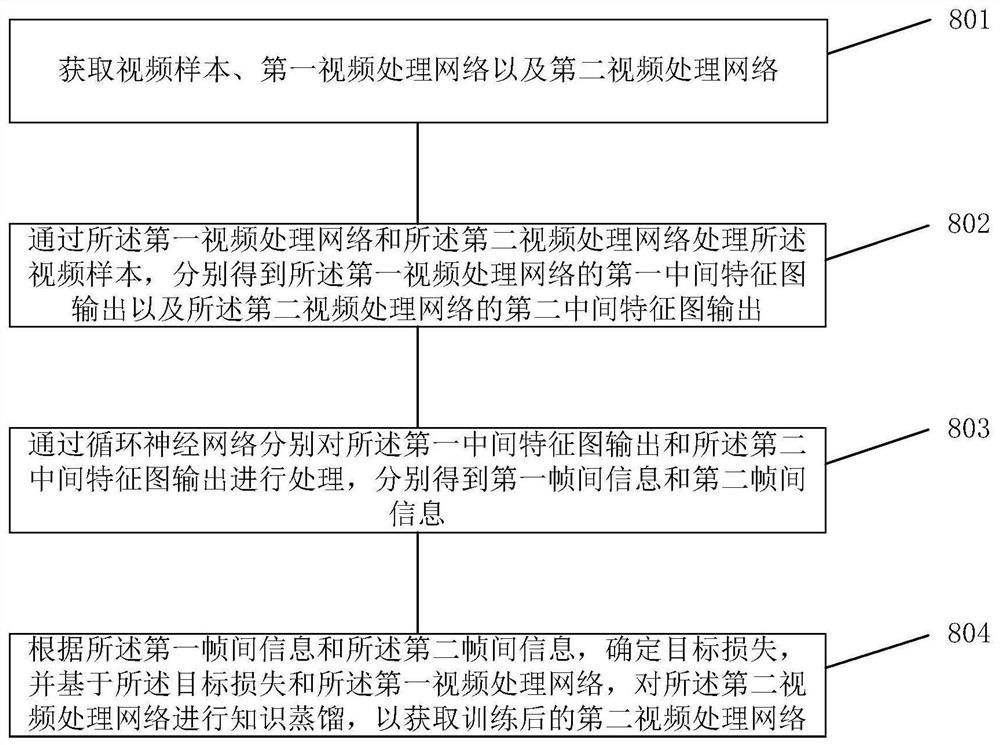
参照图8,图8为本申请实施例提供的一种模型训练方法的实施例示意,如图8示出的那样,本申请实施例提供的一种模型训练方法包括:
801、获取视频样本、第一视频处理网络以及第二视频处理网络,所述第一视频处理网络为老师模型,所述第二视频处理网络为待训练的学生模型。
本申请实施例中,视频样本可以包括多个图像帧。
本申请实施例中,第一视频处理网络以及第二视频处理网络可以用于实现视频增强任务,所谓视频增强任务可以理解为用于增强视频的质量的任务,例如所述视频增强任务可以为视频去噪任务、视频去雾任务、超分辨率任务或高动态范围任务等等,这里并不限定。
应理解,第一视频处理网络和第二视频处理网络为用于实现相同视频处理任务的模型,本申请并不限定视频处理任务的具体类型。以视频增强任务为超分辨率任务为例,接下来描述第一视频处理网络以及第二视频处理网络的网络结构的一种示意。
参照图9,图9为一种视频处理网络的结构示意,如图9所示,待处理图像可以是低分辨率图像(low resolution,LR),低分辨率图像帧经过特征提取模块处理后可以得到图像特征,之后特征图可以经过多个基本单元的处理,其中基本单元可以是通过神经网络的基本操作将基本模块进行连接得到的一种网络结构,上述网络结构可以包含预先设定好的卷积神经网络中的基础运算或者基础运算的组合,这些基础运算或者基础运算的组合可以统称为基本操作。例如,基本操作可以是指卷积操作,池化操作,残差连接等,通过基本操作可以使得各个基本模块之间进行连接,从而得到基本单元的网络结构。非线性变换部分用于将待输入图像的图像特征进行变换,将图像特征从映射至高维特征空间,通常情况下映射后的高维空间更易于重建超分图像;重建部分用于将非线性变化部分输出的图像特征进行上采样和卷积处理,得到待输入图像对应的超分辨率图像(high resolution,LR,HR)。
以超分任务模型为例,如图10所示,输入低分辨率视频(包括多个低分辨率图像帧),之后可以对低分辨率图像帧进行特征提取,以得到低尺度特征图,其中,所谓低尺度特征图是指特征图包括较多的低频信息,换一种表述,可以指特征图中包括的纹理细节信息较少,在超分任务模型中,低尺度特征图可以是一个金字塔(Pyramid)结构,由步长为2的卷积层处理得到,金字塔的每层通过若干个残差块提取特征。超分任务模型用金字塔结构对输入的图像帧进行预去模糊。
之后可以对低尺度特征图通过对齐和/或融合操作,得到去噪后的低尺度特征图。
具体的,可以对低尺度特征图运用可变形卷积(deformable conv)以实现图像的对齐,并有效规避了传统对齐方法中需要显式或者隐式地计算/估计图像光流的问题。输入的低尺度特征图可以经步长为2卷积层卷积得到L层的金字塔,对于参考帧t和任一相邻帧t+i,在金字塔的每一层都进行了相似的操作,即两特征图进行拼接并经过卷积得到可变形卷积的操作结果(在超分任务模型中称为offsets),t+i时刻的特征图输入至deformableconv,经过deformable conv.输出t+i时刻新的特征图;此外,金字塔的下层的offsets会作为上层offset conv.的输入,用于更精确地进行offsets的估计,deformable conv.输出的特征图也会上采样后与上层相应的特征进行融合。直至金字塔的第一层,deformableconv.输出且与底层融合后的特征图与参考帧的特征图拼接作为新的deformable conv.的offsets的特征图,便可预测到最终的t+i时刻对齐的特征图。
此外,由于手抖、目标运动等一些不可抗拒的原因,会导致不同的图像帧产生不同情况的模糊,因此,不同的相邻帧对于增强参考帧的贡献也就是不同的。传统的方法通常认为他们有着同等的地位,但是并不是如此。因此,超分任务模型在融合过程中引入注意力attention机制,在空域spatial和时域temporal两个维度给予不同的特征图不同的权重
具体的,首先基于已经对齐的特征图,参考帧和相邻帧再次经过不同的卷积层进一步提取特征(对于相邻帧共享参数),并计算相邻帧和参考帧之间的相似度,将其定义为该时刻的空间注意力图(temporal attention map)。每个时刻的特征图与参考帧特征图都进行这样的操作,包括参考帧,因此每个时刻都会得到一个temporal attenion map,在空间spatial维度上与对齐的特征图相乘,就相当于调整了不同时刻特征图的恢复/增强任务中所占的比重;接下来,对所有的特征图进行卷积,即进行了特征融合操作;进一步,通过金字塔结构获取spatial attention map,经过上采样后得到新的特征图。
在得到新的低尺度特征图之后,可以经过重建处理(例如可以是通过若干个残差块进行重建),得到高尺度特征图,最后通过卷积操作,得到最终的高分辨率图像帧。其中卷积变化前的高尺度特征图可以是多通道的特征图,经过卷积操作后的结果则可以表示高分辨率图像帧,例如卷积操作后的结果可以为三通道图像(如RGB图像)。
本申请实施例中,第一视频处理网络以及第二视频处理网络用于实现视频增强任务,第一视频处理网络为老师模型,第二视频处理网络为学生模型,本申请实施例中以第一视频处理网络为老师模型对第二视频处理网络进行知识蒸馏。
其中,老师(teacher)模型也可以称之为教师模型、指导模型等,这里并不限定。
在进行知识蒸馏时,可以通过采用预先训练好的复杂网络(第一视频处理网络)去训练另外一个简单的网络(第二视频处理网络),以使得简单的网络(第二视频处理网络)可以具有和复杂网络(第一视频处理网络)相同或相似的数据处理能力。所谓知识蒸馏就是将训练好的复杂网络具有的“知识”迁移到一个结构更为简单的网络中。其中,上述简单的网络相比于复杂的网络可以具有更少的参数量。
需要说明的是,上述相同或相似的数据处理能力可以理解为,在处理相同的待处理数据时,知识蒸馏后的学生模型和老师模型得到处理结果是相同或相似的。
在进行知识蒸馏时,需要基于老师模型的输出以及学生模型的输出来构建损失,其中,用于构建损失的模型输出可以是模型的输出层的输出,也可以是中间网络层的中间特征图输出,或者是对输出层的输出和/或中间网络层的中间特征图输出进行处理得到的结果,在现有的实现中,用于构建损失的模型输出为对视频中每帧图像中间网络层的中间输出进行统计得到的用于表示特征图的特征分布的空间信息,然而在视频增强的场景中,图像帧的空间信息仅仅能表示每帧图像帧的特征图的特征分布,并不携带帧间信息,其中帧间信息可以是帧间的连续及变化信息,帧间静止不动的区域可以为连续信息,帧间存在运动的对象可以为变化信息。
老师模型的参数量大、数据处理能力,能够很好地处理帧间连续及变化信息,也就是说,老师模型可以较好的识别出帧间信息,并利用帧间信息进行视频增强,增强后的视频的视频质量很高,如果损失仅仅与每个图像帧的空间信息有关,那么学生模型就并不能学习到老师模型对于帧间信息的处理能力,则蒸馏后的学生模型的视频增强效果不高。
本申请实施例中,在构建用于知识蒸馏的目标损失时,还考虑到了帧间信息,接下来详细描述如何获取到帧间信息以及如何基于帧间信息构建目标损失。
802、通过所述第一视频处理网络和所述第二视频处理网络处理所述视频样本,分别得到所述第一视频处理网络的第一中间特征图输出以及所述第二视频处理网络的第二中间特征图输出。
本申请实施例中,在进行知识蒸馏的过程中,老师模型和学生模型需要对视频样本进行处理,也就是进行模型的前馈过程,在通过所述第一视频处理网络和所述第二视频处理网络处理所述视频样本后,可以得到增强后的视频,此外还可以获取到所述第一视频处理网络的第一中间特征图输出以及所述第二视频处理网络的第二中间特征图输出。接下来描述所述第一视频处理网络的第一中间特征图输出以及所述第二视频处理网络的第二中间特征图输出:
本申请实施例中,第一中间特征图输出可以为第一视频处理网络在处理视频样本时中间网络层的特征图输出,第二中间特征图输出可以为第二视频处理网络在处理视频样本时中间网络层的特征图输出,且输出第一中间特征图输出的网络层在第一视频处理网络的位置与输出第二中间特征图输出的网络层在第二视频处理网络的位置相同。
其中,中间网络层可以为第一视频处理网络以及第二视频处理网络中用于输出特征图的网络层,只要输出的特征图可以携带图像帧的图像特征,本申请实施例并不限定中间网络层在第一视频处理网络以及第二视频处理网络的位置以及网络层的类型。
以所述视频增强任务为超分辨率任务为例,第一中间特征图输出和第二中间特征图输出可以为对视频样本进行特征提取得到的,或者是对特征提取得到的特征图进行其他处理得到的,例如可以是对特征提取得到的所述第一中间特征图输出和所述第二中间特征图输出进行去模糊处理得到的去模糊处理后的第一中间特征图和去模糊处理后的所述第二中间特征图,以上述超分任务模型为例,第一中间特征图输出和第二中间特征图输出可以为经过对齐和/或融合操作得到的低尺度特征图、或者是重建后的得到高尺度特征图。
803、分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理,分别得到第一帧间信息和第二帧间信息,所述第一帧间信息和所述第二帧间信息用于表示所述视频样本的各个图像帧之间的特征变化关系。
在一种实现中,可以通过循环神经网络分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理,分别得到第一帧间信息和第二帧间信息,所述第一帧间信息和所述第二帧间信息用于表示所述视频样本的各个图像帧之间的特征变化关系。
应理解,可以通过其他能够确定视频中图像帧之间的帧间信息的网络或者函数映射来对所述第一中间特征图输出和所述第二中间特征图输出进行处理,这里并不限定。
RNN之所以称为循环神经网络,即一个序列当前的输出与前面的输出也有关。具体的表现形式为网络会对前面的信息进行记忆并应用于当前输出的计算中,即隐含层本层之间的节点是有连接的,并且隐含层的输入不仅包括输入层的输出还包括上一时刻隐含层的输出。理论上,RNN能够对任何长度的序列数据进行处理。对于RNN的训练和对传统的CNN或DNN的训练一样。同样使用误差反向传播算法,不过有一点区别:即,如果将RNN进行网络展开,那么其中的参数,如W,是共享的。并且在使用梯度下降算法中,每一步的输出不仅依赖当前步的网络,还依赖前面若干步网络的状态。该学习算法称为基于时间的反向传播算法(back propagation through time,BPTT)。
图11为RNN的结构示意图,其中每个圆圈可以看作是一个单元,而且每个单元做的事情也是一样的,因此可以折叠呈左半图的样子。RNN是一个序列到序列的模型,其中,图12中X
本申请实施例中,所述视频样本包括多帧图像,所述第一中间特征图输出包括所述多帧图像中每帧图像对应的第一子中间特征图,所述第二中间特征图输出包括所述多帧图像中每帧图像对应的第二子中间特征图,将通过循环神经网络分别对每个第一子中间特征图和每个第二子中间特征图进行处理,可以得到第一帧间信息和第二帧间信息,由于循环神经网络在处理序列数据时,会对前面的信息进行记忆并应用于当前输出的计算中,因此所述第一帧间信息和所述第二帧间信息可以表示所述视频样本的各个图像帧之间的特征变化关系。具体的,特征变化关系可以指帧间的连续及变化信息,连续信息为帧间静止不动的区域之间的关系,变化信息为帧间存在运动的对象之间的关系。
应理解,本申请实施例中的帧间信息也可以称之为时序信息(TemporalContext)。
在一种实现中,所述第一帧间信息和所述第二帧间信息可以为所述循环神经网络输出的隐层状态(hidden state),隐层状态可以为RNN中隐藏层的输出,由于RNN在处理视频中多个图像帧的中间特征图输出时可以得到多个隐层状态(每个隐层状态对应一个图像帧),可以获取到RNN在处理中间特征图输出得到的全部隐层状态或者部分隐层状态。
通常RNN在处理靠后的图像帧得到的隐层输出中可以携带更多的帧间信息,因此为了降低计算量,可以选择RNN处理多帧图像中靠后的图像帧对应的中间特征图得到的隐层状态。
具体的,所述视频样本包括多帧图像,所述第一中间特征图输出包括所述多帧图像中每帧图像对应的第一子中间特征图,所述第二中间特征图输出包括所述多帧图像中每帧图像对应的第二子中间特征图,所述第一帧间信息包括所述循环神经网络对所述多帧图像中靠后的M帧图像对应的第一子中间特征图进行处理得到的M个隐层状态,所述第二帧间信息为所述循环神经网络对所述多帧图像中靠后的M帧图像对应的第二子中间特征图进行处理得到的M个隐层状态。应理解,这里的M可以灵活选择,本申请并不限定。
以循环神经网络为长短期记忆网络(long short-term memory,LSTM)为例,则所述第一帧间信息和所述第二帧间信息可以为所述LSTM输出的细胞状态(cell state)。
接下来描述本申请实施例中的LSTM。
参照图13,图13为LSTM的一种结构示意,其中,视频样本中的各个图像帧可以依次输入图13所示的LSTM单元中,LSTM处理每个图像帧可以得到细胞状态和隐层状态,并将细胞状态和隐层状态传递至LSTM处理相邻下一个图像帧的过程,如图13所示,Ct-1为LSTM处理上一个帧图像的中间特征图输出得到的细胞状态,细胞状态的传输类似于输送带,细胞状态在LSTM的整个链上运行,有一些小的线性操作可以作用其上,LSTM具有删除或添加信息到细胞状态的能力,这个能力是由被称为门(Gate)的结构所赋予的。门(Gate)是一种可选地让信息通过的方式。示例性的它由一个Sigmoid神经网络层和一个点乘法运算组成,Sigmoid神经网络层输出0和1之间的数字,这个数字描述每个组件有多少信息可以通过,0表示不通过任何信息,1表示全部通过,LSTM可以有三个门,用于保护和控制细胞状态。
LSTM的第一步是确定从细胞状态中丢弃什么信息。该决定由被称为“忘记门”的Sigmoid层实现。它查看Ht-1(前一个隐层状态)和Ft(当前输入),并为细胞状态Ct-1(上一个状态)中的每个数字输出0和1之间的数字,1代表完全保留,而0代表彻底删除。下一步是确定要在细胞状态中存储什么信息。具体的,可以由输入门层的Sigmoid层确定需要更新哪些值it,tanh层创建候选向量
本申请实施例中,LSTM网络可以对输入的图像帧依次进行处理,得到每个图像帧对应的细胞状态,而LSTM网络通常在处理靠后的图像帧得到的隐层输出中可以携带更多的帧间信息,因此为了降低计算量,可以选择LSTM网络在处理多帧图像中靠后的图像帧对应的中间特征图得到的细胞状态。
在一种实现中,可以直接选择LSTM网络在处理多帧图像中最后一个图像帧对应的中间特征图得到的细胞状态,具体的,针对于老师网络输出的第一中间特征图输出,第一中间特征图输出中可以包括多个第一子中间特征图,其中,每个第一子中间特征图可以对应于一个图像帧,则可以获取视频中最后一个图像帧对应的第一子中间特征图,并确定LSTM网络处理最后一个图像帧对应的第一子中间特征图得到的细胞状态为第一帧间信息;类似的,针对于学生网络输出的第二中间特征图输出,第二中间特征图输出中可以包括多个第二子中间特征图,其中,每个第二子中间特征图可以对应于一个图像帧,则可以获取视频中最后一个图像帧对应的第二子中间特征图,并确定LSTM网络处理最后一个图像帧对应的第二子中间特征图得到的细胞状态为第二帧间信息。
应理解,除了细胞状态,还可以根据LSTM网络处理第一中间特征图和第二中间特征图得到的隐层状态,来确定上述第一帧间信息以及第二帧间信息,具体的,可以通过LSTM分别对第一视频处理网络输出的所述第一中间特征图输出以及第二视频处理网络输出的所述第二中间特征图输出进行处理,分别得到第一隐层状态和第二隐层状态,可以将第一隐层状态和第二隐层状态分别作为上述第一帧间信息以及第二帧间信息。
804、根据所述第一帧间信息和所述第二帧间信息,确定目标损失,并基于所述目标损失和所述第一视频处理网络,对所述第二视频处理网络进行知识蒸馏,以获取训练后的第二视频处理网络,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异有关。
本申请实施例中,在得到第一帧间信息和所述第二帧间信息之后,可以基于第一帧间信息和所述第二帧间信息之间的差异来构建用于进行知识蒸馏的目标损失,并基于所述目标损失和所述第一视频处理网络,对所述第二视频处理网络进行知识蒸馏,以获取训练后的第二视频处理网络。
具体的,在通过对老师模型(第一视频处理网络)对应的第一帧间信息和学生模型(第二视频处理网络)对应的第二帧间信息进行约束,即:
其中,Ld表示范数约束,可以但不限于使用L2-norm距离,LTD为目标损失,CT为第一帧间信息,CS为第二帧间信息。
应理解,基于第一帧间信息以及第二帧间信息之间差异确定的损失也可以称之为时域损失。
在一种实现中,目标损失除了与第一帧间信息和第二帧间信息之间的差异有关之外,还可以与第一中间特征图输出和第二中间特征图输出的空间信息之间的差异有关,接下来详细进行说明:
本申请实施例中,所述视频样本可以包括多帧图像,所述第一中间特征图输出包括所述多帧图像中每帧图像对应的第一子中间特征图,所述第二中间特征图输出包括所述多帧图像中每帧图像对应的第二子中间特征图,对每个所述第一子中间特征图和每个所述第二子中间特征图进行处理,以得到每个所述第一子中间特征图的第一空间信息以及每个所述第二子中间特征图的第二空间信息,所述第一空间信息和所述第二空间信息用于表示特征图的特征分布;根据所述第一帧间信息和所述第二帧间信息、以及所述第一空间信息和所述第二空间信息,确定目标损失,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异,以及所述第一空间信息和所述第二空间信息之间的差异有关。
其中,空间信息用于表示特征图的特征分布,特征分布可以包括丰富的图像内容并表示对应图像帧的图像特征,例如频率特征、纹理细节特征等等。
在一种可选的实现中,可以对每个第一子中间特征图按通道求平方和,以得到第一空间信息,对每个第二子中间特征图按通道求平方和,以得到第二空间信息,在信息统计为按通道求平方和的情况下,空间信息也可以称之为空间注意力图。具体的,可以是对每个第一子中间特征图按通道求平方和,以得到第一空间信息,对每个第二子中间特征图按通道求平方和,以得到第二空间信息。
应理解上述平方和运算仅为一种示意,在实际应用中还可以通过其他运算来计算得到第一空间信息和第二空间信息,这里并不限定。
通过上述方式可以得到第一视频处理模型对应的第一空间信息以及第二视频处理模型对应的第二空间信息,之后可以对第一空间信息以及第二空间信息进行约束,进而目标损失可以包括基于第一空间信息以及第二空间信息之间差异确定的损失。应理解,基于第一空间信息以及第二空间信息之间差异确定的损失也可以称之为空域损失。关于空域损失和时域损失的计算可以参照图14。
在一种实现中,目标损失除了与第一帧间信息和第二帧间信息之间的差异有关之外,还可以与第一视频处理模型处理得到的第一视频处理结果和视频样本对应的真值(ground truth)之间的差异有关,接下来详细进行说明:
本申请实施例中,可以通过所述第一视频处理网络和所述第二视频处理网络处理所述视频样本,分别得到所述第一视频处理网络的第一中间特征图输出、所述第一视频处理网络输出的第一视频处理结果以及所述第二视频处理网络的第二中间特征图输出,可以获取所述视频样本对应的真值(ground truth);根据所述第一帧间信息和所述第二帧间信息、以及所述第一视频处理结果和所述真值,确定目标损失,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异,以及所述第一视频处理结果和所述真值之间的差异有关。其中,以第一视频处理网络和第二视频处理网络用于实现视频增强任务为例,所谓视频样本对应的真值(ground truth)可以理解为提升了视频质量的视频样本,在一种实现中,视频样本对应的真值(ground truth)也可以是预先设置的,或者是通过第一视频处理网络对视频样本进行图像增强后得到的,这里并不限定。
通过上述方式可以得到第一视频处理模型输出的第一视频处理结果,之后可以对第一视频处理结果以及视频样本对应的真值(ground truth)进行约束,进而目标损失可以包括基于第一视频处理结果以及视频样本对应的真值(ground truth)之间差异确定的损失。应理解,基于第一视频处理结果以及视频样本对应的真值(ground truth)之间差异确定的损失也可以称之为重构损失。
参照图15,在一种实现中,可以基于所述第一帧间信息和所述第二帧间信息之间的差异、所述第一空间信息和所述第二空间信息之间的差异、以及第一视频处理结果和视频样本对应的真值(ground truth)之间的差异,来构建目标损失,具体可以参照如下公式:
其中,则目标损失为L,λ1和λ2为超参数。LSD为空域损失,LTD为时域损失,Lrec为重构损失。
本申请实施例提供了一种模型训练方法,所述方法包括:获取视频样本、第一视频处理网络以及第二视频处理网络,所述第一视频处理网络为老师模型,所述第二视频处理网络为待训练的学生模型;通过所述第一视频处理网络和所述第二视频处理网络处理所述视频样本,分别得到所述第一视频处理网络的第一中间特征图输出以及所述第二视频处理网络的第二中间特征图输出;通过循环神经网络分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理,分别得到第一帧间信息和第二帧间信息,所述第一帧间信息和所述第二帧间信息用于表示所述视频样本的各个图像帧之间的特征变化关系;根据所述第一帧间信息和所述第二帧间信息,确定目标损失,并基于所述目标损失和所述第一视频处理网络,对所述第二视频处理网络进行知识蒸馏,以获取训练后的第二视频处理网络,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异有关。通过上述方式,在不改变模型结构的前提下,在用于进行知识蒸馏的目标损失中加入了帧间信息,可以将老师模型可以较好的识别出帧间信息,并利用帧间信息进行视频增强的能力迁移至学生模型,提高了知识蒸馏后的学生模型进行视频增强任务后得到的增强后的视频的视频质量。
接下来基于实验结果描述本申请实施例的有益效果。
按照本申请实施例提供的流程,采用公开的标准数据集Vimeo90K数据集作为训练集,采用Vimeo90K-Test和Vid4 testset作为测试集。具体的利用本申请实施例提供的流程,使用EDVR作为教师模型,分别对VDSR,VESPCN,VSRNet,FastDVDnet模型在Vid4和Vimeo90K-Test视频数据集上进行了测试,参照表1和表2,表1,表2是量化评测结果:峰值信噪比(peak signal-to-noise ratio,PSNR)和结构相似性(structural similarity,SSIM)指标值,可以看出本申请实施例相比不用蒸馏的结果都有一定的提升。梅花标识代表基于自编码器和统计量的空间蒸馏,本申请实施例在Vid4和Vimeo90K-Test相比该方法分别有0.17dB和0.55dB的提升。
表1 PSNR量化指标结果(★代表本申请实施例提供的方法)
表2 SSIM量化指标结果(★代表本申请实施例提供的方法)
如图16和图17所示,可以看出基于本申请实施例提供的模型训练方法得到的模型(训练后的第二视频处理模型)具有更好的细节和纹理恢复能力,如图中大楼窗户和桌布格子等的恢复效果。如图18所示,图18为帧间一致性的对比图,其中STD为基于本申请实施例提供的模型训练方法得到的模型的处理结果,如图19所示,测试了本申请实施例提供的模型训练方法在不同大小计算量/参数的模型的蒸馏效果,通过修改学生模型的卷积通道数来降低计算量/参数,本申请实施例提供的模型训练方法相比于不使用蒸馏的结果,在不同计算量/参数的学生模型上都有提升。
参照图20,图20为本申请实施例提供的一种模型训练装置2000的示意,如图20中示出的那样,本申请提供的模型训练装置2000包括:
获取模块2001,用于获取视频样本、第一视频处理网络以及第二视频处理网络,所述第一视频处理网络为老师模型,所述第二视频处理网络为待训练的学生模型;
关于获取模块2001的具体描述可以参照步骤801的描述,这里不再赘述。
视频处理模块2002,用于通过所述第一视频处理网络和所述第二视频处理网络处理所述视频样本,分别得到所述第一视频处理网络的第一中间特征图输出以及所述第二视频处理网络的第二中间特征图输出;
关于视频处理模块2002的具体描述可以参照步骤802的描述,这里不再赘述。
特征图处理模块2003,用于分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理,分别得到第一帧间信息和第二帧间信息,所述第一帧间信息和所述第二帧间信息用于表示所述视频样本的各个图像帧之间的特征变化关系;
关于特征图处理模块2003的具体描述可以参照步骤803的描述,这里不再赘述。
知识蒸馏模块2004,用于根据所述第一帧间信息和所述第二帧间信息,确定目标损失,并基于所述目标损失和所述第一视频处理网络,对所述第二视频处理网络进行知识蒸馏,以获取训练后的第二视频处理网络,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异有关。
关于知识蒸馏模块2004的具体描述可以参照步骤804的描述,这里不再赘述。
在一种可能的实现中,所述特征图处理模块,用于通过循环神经网络分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理。
在一种可能的实现中,所述第一帧间信息和所述第二帧间信息为所述循环神经网络的隐层状态(hidden state)。
在一种可能的实现中,所述视频样本包括多帧图像,所述第一中间特征图输出包括所述多帧图像中每帧图像对应的第一子中间特征图,所述第二中间特征图输出包括所述多帧图像中每帧图像对应的第二子中间特征图,所述第一帧间信息包括所述循环神经网络对所述多帧图像中靠后的M帧图像对应的第一子中间特征图进行处理得到的M个隐层状态,所述第二帧间信息为所述循环神经网络对所述多帧图像中靠后的M帧图像对应的第二子中间特征图进行处理得到的M个隐层状态。
在一种可能的实现中,所述循环神经网络为长短期记忆LSTM网络,所述第一帧间信息和所述第二帧间信息为所述LSTM输出的细胞状态。
在一种可能的实现中,所述视频样本包括多帧图像,所述第一中间特征图输出包括所述多帧图像中每帧图像对应的第一子中间特征图,所述第二中间特征图输出包括所述多帧图像中每帧图像对应的第二子中间特征图,所述第一帧间信息为所述LSTM网络对所述多帧图像中最后一帧图像对应的第一子中间特征图进行处理得到的细胞状态,所述第二帧间信息为所述LSTM网络对所述多帧图像中最后一帧图像对应的第二子中间特征图进行处理得到的细胞状态。
在一种可能的实现中,所述视频样本包括多帧图像,所述第一中间特征图输出包括所述多帧图像中每帧图像对应的第一子中间特征图,所述第二中间特征图输出包括所述多帧图像中每帧图像对应的第二子中间特征图,所述装置还包括:
信息统计模块,用于对每个所述第一子中间特征图和每个所述第二子中间特征图进行处理,以得到每个所述第一子中间特征图的第一空间信息以及每个所述第二子中间特征图的第二空间信息,所述第一空间信息和所述第二空间信息用于表示特征图的特征分布;
所述知识蒸馏模块,用于根据所述第一帧间信息和所述第二帧间信息、以及所述第一空间信息和所述第二空间信息,确定目标损失,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异,以及所述第一空间信息和所述第二空间信息之间的差异有关。
在一种可能的实现中,所述第一空间信息为第一空间注意力图,所述第二空间信息为第二空间注意力图,所述信息统计模块,用于基于空间注意力机制,分别对所述第一中间特征图输出和所述第二中间特征图输出进行映射,分别得到所述第一空间注意力图和所述第二空间注意力图。
在一种可能的实现中,所述视频处理模块,用于通过所述第一视频处理网络和所述第二视频处理网络处理所述视频样本,分别得到所述第一视频处理网络的第一中间特征图输出、所述第一视频处理网络输出的第一视频处理结果以及所述第二视频处理网络的第二中间特征图输出;
所述知识蒸馏模块,用于根据所述第一帧间信息和所述第二帧间信息、以及所述第一视频处理结果和所述真值,确定目标损失,所述目标损失与所述第一帧间信息和所述第二帧间信息之间的差异,以及所述第一视频处理结果和所述真值之间的差异有关。
在一种可能的实现中,所述第一视频处理网络以及所述第二视频处理网络用于实现视频增强任务。
在一种可能的实现中,所述视频增强任务为视频去噪任务、视频去雾任务、超分辨率任务、或高动态范围任务。
在一种可能的实现中,所述装置还包括:去模糊模块,用于在所述通过循环神经网络分别对所述第一中间特征图输出和所述第二中间特征图输出进行处理之前,分别对所述第一中间特征图和所述第二中间特征图进行去模糊处理,以得到去模糊处理后的所述第一中间特征图和去模糊处理后的所述第二中间特征图;
所述特征图处理模块,用于通过循环神经网络分别对所述去模糊处理后的所述第一中间特征图和去模糊处理后的所述第二中间特征图进行处理。
接下来介绍本申请实施例提供的一种执行设备,请参阅图21,图21为本申请实施例提供的执行设备的一种结构示意图,执行设备2100具体可以表现为手机、平板、笔记本电脑、智能穿戴设备、服务器等,此处不做限定。其中,执行设备2100可以运行经过图8对应的实施例处理得到的训练后的第二视频处理网络。具体的,执行设备2100包括:接收器2101、发射器2102、处理器2103和存储器2104(其中执行设备2100中的处理器2103的数量可以一个或多个,图21中以一个处理器为例),其中,处理器2103可以包括应用处理器21031和通信处理器21032。在本申请的一些实施例中,接收器2101、发射器2102、处理器2103和存储器2104可通过总线或其它方式连接。
存储器2104可以包括只读存储器和随机存取存储器,并向处理器2103提供指令和数据。存储器2104的一部分还可以包括非易失性随机存取存储器(non-volatile randomaccess memory,NVRAM)。存储器2104存储有处理器和操作指令、可执行模块或者数据结构,或者它们的子集,或者它们的扩展集,其中,操作指令可包括各种操作指令,用于实现各种操作。
处理器2103控制执行设备的操作。具体的应用中,执行设备的各个组件通过总线系统耦合在一起,其中总线系统除包括数据总线之外,还可以包括电源总线、控制总线和状态信号总线等。但是为了清楚说明起见,在图中将各种总线都称为总线系统。
上述本申请实施例揭示的方法可以应用于处理器2103中,或者由处理器2103实现。处理器2103可以是一种集成电路芯片,具有信号的处理能力。在实现过程中,上述方法的各步骤可以通过处理器2103中的硬件的集成逻辑电路或者软件形式的指令完成。上述的处理器2103可以是通用处理器、数字信号处理器(digital signal processing,DSP)、微处理器或微控制器、以及视觉处理器(vision processing unit,VPU)、张量处理器(tensorprocessing unit,TPU)等适用于AI运算的处理器,还可进一步包括专用集成电路(application specific integrated circuit,ASIC)、现场可编程门阵列(field-programmable gate array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。该处理器2103可以实现或者执行本申请实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。结合本申请实施例所公开的方法的步骤可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件模块组合执行完成。软件模块可以位于随机存储器,闪存、只读存储器,可编程只读存储器或者电可擦写可编程存储器、寄存器等本领域成熟的存储介质中。该存储介质位于存储器2104,处理器2103读取存储器2104中的信息,结合其硬件完成上述方法的步骤。
接收器2101可用于接收输入的数字或字符信息,以及产生与执行设备的相关设置以及功能控制有关的信号输入。发射器2102可用于通过第一接口输出数字或字符信息;发射器2102还可用于通过第一接口向磁盘组发送指令,以修改磁盘组中的数据;发射器2102还可以包括显示屏等显示设备。
执行设备可以获取到通过图8对应实施例中的模型训练方法训练得到的训练后的第二视频处理网络,并进行模型推理。
本申请实施例还提供了一种训练设备,请参阅图22,图22是本申请实施例提供的训练设备一种结构示意图,具体的,训练设备2200由一个或多个服务器实现,训练设备2200可因配置或性能不同而产生比较大的差异,可以包括一个或一个以上中央处理器(centralprocessing units,CPU)2219(例如,一个或一个以上处理器)和存储器2232,一个或一个以上存储应用程序2242或数据2244的存储介质2230(例如一个或一个以上海量存储设备)。其中,存储器2232和存储介质2230可以是短暂存储或持久存储。存储在存储介质2230的程序可以包括一个或一个以上模块(图示没标出),每个模块可以包括对训练设备中的一系列指令操作。更进一步地,中央处理器2219可以设置为与存储介质2230通信,在训练设备2200上执行存储介质2230中的一系列指令操作。
训练设备2200还可以包括一个或一个以上电源2226,一个或一个以上有线或无线网络接口2250,一个或一个以上输入输出接口2258;或,一个或一个以上操作系统2241,例如Windows ServerTM,Mac OS XTM,UnixTM,LinuxTM,FreeBSDTM等等。
具体的,训练设备可以执行图8对应实施例中的模型训练方法。
图20中描述的模型训练装置2000可以为训练设备2200中的模块,训练设备2200中的处理器可以执行模型训练装置2000所执行的模型训练方法。
本申请实施例中还提供一种包括计算机程序产品,当其在计算机上运行时,使得计算机执行如前述执行设备所执行的步骤,或者,使得计算机执行如前述训练设备所执行的步骤。
本申请实施例中还提供一种计算机可读存储介质,该计算机可读存储介质中存储有用于进行信号处理的程序,当其在计算机上运行时,使得计算机执行如前述执行设备所执行的步骤,或者,使得计算机执行如前述训练设备所执行的步骤。
本申请实施例提供的执行设备、训练设备或终端设备具体可以为芯片,芯片包括:处理单元和通信单元,所述处理单元例如可以是处理器,所述通信单元例如可以是输入/输出接口、管脚或电路等。该处理单元可执行存储单元存储的计算机执行指令,以使执行设备内的芯片执行上述实施例描述的数据处理方法,或者,以使训练设备内的芯片执行上述实施例描述的数据处理方法。可选地,所述存储单元为所述芯片内的存储单元,如寄存器、缓存等,所述存储单元还可以是所述无线接入设备端内的位于所述芯片外部的存储单元,如只读存储器(read-only memory,ROM)或可存储静态信息和指令的其他类型的静态存储设备,随机存取存储器(random access memory,RAM)等。
另外需说明的是,以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。另外,本申请提供的装置实施例附图中,模块之间的连接关系表示它们之间具有通信连接,具体可以实现为一条或多条通信总线或信号线。
通过以上的实施方式的描述,所属领域的技术人员可以清楚地了解到本申请可借助软件加必需的通用硬件的方式来实现,当然也可以通过专用硬件包括专用集成电路、专用CPU、专用存储器、专用元器件等来实现。一般情况下,凡由计算机程序完成的功能都可以很容易地用相应的硬件来实现,而且,用来实现同一功能的具体硬件结构也可以是多种多样的,例如模拟电路、数字电路或专用电路等。但是,对本申请而言更多情况下软件程序实现是更佳的实施方式。基于这样的理解,本申请的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在可读取的存储介质中,如计算机的软盘、U盘、移动硬盘、ROM、RAM、磁碟或者光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,训练设备,或者网络设备等)执行本申请各个实施例所述的方法。
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。
所述计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行所述计算机程序指令时,全部或部分地产生按照本申请实施例所述的流程或功能。所述计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。所述计算机指令可以存储在计算机可读存储介质中,或者从一个计算机可读存储介质向另一计算机可读存储介质传输,例如,所述计算机指令可以从一个网站站点、计算机、训练设备或数据中心通过有线(例如同轴电缆、光纤、数字用户线(DSL))或无线(例如红外、无线、微波等)方式向另一个网站站点、计算机、训练设备或数据中心进行传输。所述计算机可读存储介质可以是计算机能够存储的任何可用介质或者是包含一个或多个可用介质集成的训练设备、数据中心等数据存储设备。所述可用介质可以是磁性介质,(例如,软盘、硬盘、磁带)、光介质(例如,DVD)、或者半导体介质(例如固态硬盘(Solid State Disk,SSD))等。
- 网络模型训练方法、装置、文本分类模型及网络模型
- 一种模型训练方法、装置和用于模型训练的装置