一种可调行程双向夹持面的卡盘软爪及制备方法
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及机械加工领域,尤其涉及一种可调行程双向夹持面的卡盘软爪及制备方法。
背景技术
目前卡爪是三爪卡盘的重要组成部分,卡爪通过在卡盘体上的径向移动来实现工件的夹紧和定位。
普通三爪卡盘上的卡爪限定了最大夹持范围,从而对于零件的夹持范围有限,在对尺寸较大的零件进行夹持时,无法进行夹持。
发明内容
本发明的目的在于提供一种可调行程双向夹持面的卡盘软爪及制备方法,旨在解决现有技术中的普通三爪卡盘上的卡爪限定了最大夹持范围,从而对于零件的夹持范围有限,在对尺寸较大的零件进行夹持时,无法进行夹持的技术问题。
为实现上述目的,本发明采用的一种可调行程双向夹持面的卡盘软爪,安装于三爪卡盘上,包括卡爪滑座和卡盘软爪本体,
所述卡爪滑座与所述三爪卡盘固定连接,并位于所述三爪卡盘的一侧;
所述卡盘软爪本体包括软爪底座、滑块和内六角螺栓,所述软爪底座与所述卡爪滑座固定连接,并位于所述卡爪滑座的一侧,所述滑块与所述软爪滑座滑动连接,并位于所述软爪底座远离所述卡爪滑座的一侧,所述内六角螺栓与所述软爪底座可拆卸连接,并与所述滑块可拆卸连接,且贯穿所述滑块。
其中,所述软爪底座的数量为多个,并分别以所述三爪卡盘的中心为轴心等距圆周设置;所述滑块的数量为多个,并分别设置在所述软爪底座上;所述内六角螺栓的数量为多个,并分别连接所述软爪底座和所述滑块。
其中,所述卡爪滑座的数量为多个,并分别以所述三爪卡盘的中心为轴心等距圆周设置。
本发明还提供一种可调行程双向夹持面的卡盘软爪制备方法,包括如下步骤:
对现有的三爪卡盘及卡爪进行结构分析,发现现有的所述三爪卡盘及所述卡爪存在的问题;
重新设计卡爪绘制草图;
对软爪底座和滑块进行三维建模;
结合软爪底座与滑块的三维建模绘制出工程图纸;
根据图纸要求在加工中心上完成软爪底座与滑块的加工并进行质量检测。
其中,在“对现有的三爪卡盘及卡爪进行结构分析,发现现有的所述三爪卡盘及所述卡爪存在的问题”中,所述步骤还包括:
利用均布在所述三爪卡盘上的三个活动卡爪的径向移动把工件夹紧和定位,发现夹持工件的种类及尺寸大小范围大于设定的夹持直径且夹持的定位精度低。
其中,在“对软爪底座和滑块进行三维建模”中,所述步骤还包括:
通过对所述软爪底座和所述滑块的草图绘制,初步确定了软爪底座和滑块的形状和尺寸。
其中,在“结合软爪底座与滑块的三维建模绘制出工程图纸”中,
结合所述软爪底座与所述滑块的三维建模绘制出所述软爪底座和所述滑块的工程图纸及装配图。
其中,在“根据图纸要求在加工中心上完成软爪底座与滑块的加工并进行质量检测”后,
做实验总结,绘制实验过程流程图。
本发明的一种可调行程双向夹持面的卡盘软爪及制备方法,重新设计好的软爪底座与三爪卡盘上的卡爪滑座用内六角螺栓连接好后,在将重新设计的滑块与软爪底座配合,把滑块滑到软爪底座前端用内六角螺栓连接上利用滑块前面夹持工件,此时夹持工件的最大直径为三爪卡盘初始设计的最大夹持范围,通过滑动滑块在软爪底座上的位置可调整夹持范围,将滑块滑动到底座末端用内六角螺栓连接上正面夹持工件,此时夹持工件的最大直径是在原有的基础上增加了滑块在软爪底座上移动的距离,进而能够夹持更大尺寸的工件。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1是本发明的卡盘软爪本体的整体安装示意图。
图2是本发明的卡盘软爪本体的拆分图。
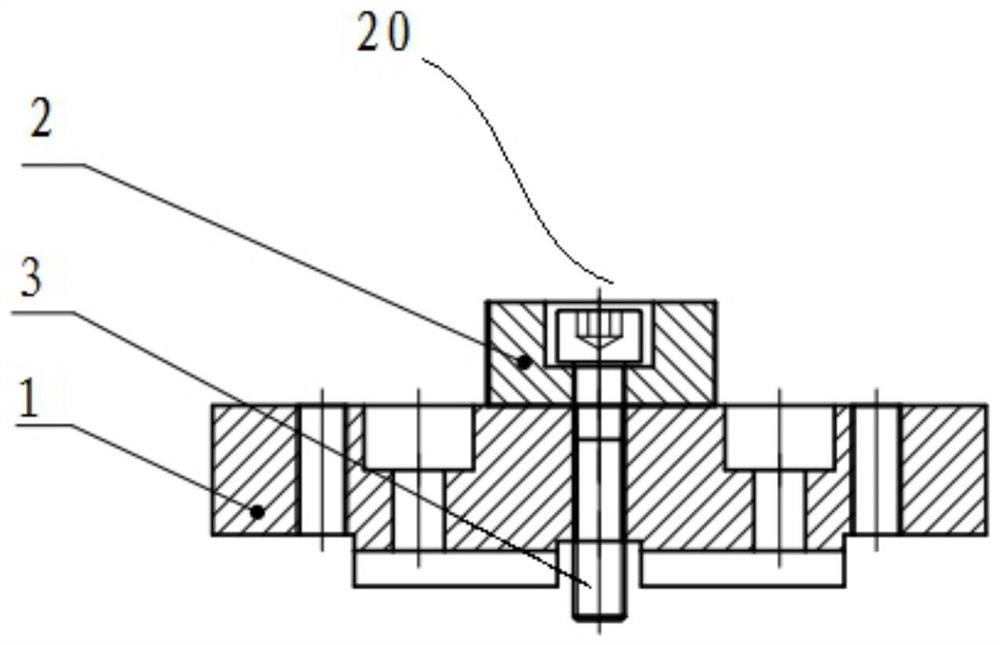
图3是本发明的卡爪滑座和软爪底座的连接结构示意图。
图4是本发明的可调行程双向夹持面的卡盘软爪制备方法的流程图。
图中:1-软爪底座、2-滑块、3-内六角螺栓、10-卡爪滑座、20-卡盘软爪本体。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
请参阅图1至图3,本发明提供了一种可调行程双向夹持面的卡盘软爪,安装于三爪卡盘上,包括卡爪滑座10和卡盘软爪本体20,
所述卡爪滑座10与所述三爪卡盘固定连接,并位于所述三爪卡盘的一侧;
所述卡盘软爪本体20包括软爪底座1、滑块2和内六角螺栓3,所述软爪底座1与所述卡爪滑座10固定连接,并位于所述卡爪滑座10的一侧,所述滑块2与所述软爪滑座滑动连接,并位于所述软爪底座1远离所述卡爪滑座10的一侧,所述内六角螺栓3与所述软爪底座1可拆卸连接,并与所述滑块2可拆卸连接,且贯穿所述滑块2。
进一步地,所述软爪底座1的数量为多个,并分别以所述三爪卡盘的中心为轴心等距圆周设置;所述滑块2的数量为多个,并分别设置在所述软爪底座1上;所述内六角螺栓3的数量为多个,并分别连接所述软爪底座1和所述滑块2。
进一步地,所述卡爪滑座10的数量为多个,并分别以所述三爪卡盘的中心为轴心等距圆周设置。
在本实施方式中,结合三爪卡盘自动定心原理把原始的活动卡爪进行重新设计,设计一种可调行程双向夹持面的卡盘软爪。将重新设计好的软爪底座1与三爪卡盘上的卡爪滑座10用内六角螺栓3连接上,再将重新设计的滑块2与软爪底座1配合。使其能够在软爪底座1上自由来回的滑动。
工作原理:1.对轴类零件的夹持和定位
重新设计好的软爪底座1与三爪卡盘上的卡爪滑座10用内六角螺栓3连接好后,在将重新设计的滑块2与软爪底座1配合,把滑块2滑到软爪底座1前端用内六角螺栓3连接上利用滑块2前面夹持工件,此时夹持工件的最大直径为三爪卡盘初始设计的最大夹持范围,通过滑动滑块2在软爪底座1上的位置可调整夹持范围,将滑块2滑动到底座末端用内六角螺栓3连接上正面夹持工件,此时夹持工件的最大直径是在原有的基础上增加了滑块2在软爪底座1上移动的距离。
2.对盘盖类零件的夹持和定位
将滑块2滑到软爪底座1前端用内六角螺栓3连接上利用滑块2后面夹持工件,此时可以夹持内径较小的盘盖类零件,通过滑动滑块2在软爪底座1上的位置可调整夹持范围,将滑块2滑动到底座末端用内六角螺栓3连接上利用滑块2后面夹持工件,此时可以夹持内径较大的盘盖类零件。
如此,通过所述滑块2在所述软爪底座1上的位置可调整夹持范围,将所述滑块2滑动到底座末端用所述内六角螺栓3连接上正面夹持工件,此时夹持工件的最大直径是在原有的基础上增加了滑块2在软爪底座1上移动的距离,进而能够夹持更大尺寸的工件。
请参阅图4,本发明还提供一种可调行程双向夹持面的卡盘软爪制备方法,包括如下步骤:
S401:对现有的三爪卡盘及卡爪进行结构分析,发现现有的所述三爪卡盘及所述卡爪存在的问题,利用均布在所述三爪卡盘上的三个活动卡爪的径向移动把工件夹紧和定位,发现夹持工件的种类及尺寸大小范围大于设定的夹持直径且夹持的定位精度低;
S402:重新设计卡爪绘制草图;
S403:对软爪底座1和滑块2进行三维建模,通过对所述软爪底座1和所述滑块2的草图绘制,初步确定了软爪底座1和滑块2的形状和尺寸;
S404:结合软爪底座1与滑块2的三维建模绘制出工程图纸,结合所述软爪底座1与所述滑块2的三维建模绘制出所述软爪底座1和所述滑块2的工程图纸及装配图;
S405:根据图纸要求在加工中心上完成软爪底座1与滑块2的加工并进行质量检测。
S406:做实验总结,绘制实验过程流程图。
在本实施方式中,
1.对普通三爪卡盘及卡爪进行结构分析。
以CK-6132B车床型号进行分析说明。
从CK-6132B车床型号技术参数中可以得知盘类零件的最大加工直径是
三爪卡盘是把工件夹紧和定位的机床重要附件,它对夹持的工件起到自动定心的作用,利用均布在卡盘体上的三个活动卡爪的径向移动把工件夹紧和定位,但夹持工件的种类及尺寸大小范围比较局限且夹持和定位精度不高。
2.重新设计卡爪绘制草图
通过对普通三爪卡盘及卡爪的分析后并得出结论,将设计一种可调行程双向夹持面的卡盘软爪重新与卡盘体配合使用。首先进行软爪底座1和滑块2的草图绘制。
3.对软爪底座1和滑块2进行三维建模
通过对软爪底座1和滑块2的草图绘制初步确定了软爪底座1和滑块2的形状和尺寸。
4.结合软爪底座1与滑块2的三维建模绘制出工程图纸
通过对软爪底座1和滑块2的草图绘制初步确定了软爪底座1和滑块2的形状和尺寸。
结合软爪底座1与滑块2的三维建模绘制出软爪底座1和滑块2的工程图纸及装配图。图纸要求按照国家制图标准来制定并结合实际生产加工要求。
5.加工制造
根据图纸要求在加工中心上完成软爪底座1与滑块2的加工并进行质量检测。
6.实验总结(流程图)
通过试切实验证明,可调行程双向夹持面的卡盘软爪符合机械设计标准、满足加工要求和保证零件加工质量。
在数控车工实训操作教学中要求学生具备操作车床和加工中等复杂零件的能力,设计一种可调行程双向夹持面的卡盘软爪,能实现对各种中等复杂零件的准确夹持和精确定位提高加工精度、能帮助学生提升技能操作能力、能结合生产实际降低耗材使用成本提高生产效率。
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
- 一种可调行程双向夹持面的卡盘软爪及制备方法
- 一种可调行程同步对中料框夹持手爪