一种粉末成型机的阴模平衡控制结构及其工作过程
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及一种粉末成型机的阴模平衡控制结构及其工作过程,属于粉末冶金技术领域。
背景技术
控制阴模的目的就是在压制结束后制品脱模前,要求阴模停止压制结束位置保持不动,等待脱模杆到位使其向下运行并使制品脱出型腔。压制结束上冲退回,阴模在充填复位力的作用下会向上运行,此时充填复位缸上部通气产生一个向下的力来平衡向上的阴模充填复位力,使阴模在原位置固定不动。这就是控制阴模平衡的过程,其目的是防止阴模向上运行而使制品脱出后产生裂纹形成废品。实际控制调整时的平衡气压较难调节,向下的力调的过大时会将阴模压下,特别是充填量较小时会影响模具的调试进而影响到制品脱出后的质量;向下的力调节过小时,阴模向上反弹还是影响制品脱出后质量。
发明内容
本发明针对上述缺陷,目的在于提供一种结构合理,提高制品质量的一种粉末成型机的阴模平衡控制结构及其工作过程。
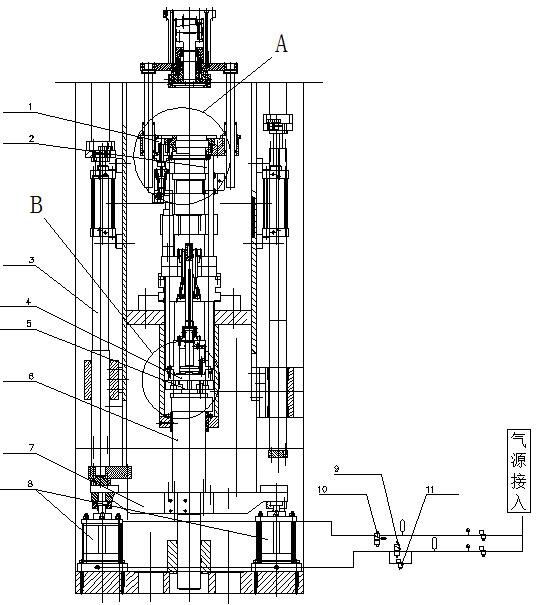
为此本发明采用的技术方案是:一种粉末成型机的阴模平衡控制结构,包括用于安装模具的设置在模架上的阴模板(1),所述阴模板(1)通过导柱(2)连接在模架线连接板(4)上;并通过下T型头、下滑柱(6)连接在下横梁(7)上;所述下横梁(7)的两端与两只充填复位缸(8)相固结,并通过充填复位缸(8)的向上驱动完成阴模板(1)的充填复位;
所述充填复位缸(8)上连接有常通电磁阀(9)和常闭电磁阀(10),所述常通电磁阀(9)和常闭电磁阀(10)并联设置,分别和所述充填复位缸(8)的下腔、上腔连接。
进一步的,所述常通电磁阀(9)上并联设置有液流阀(11)。
进一步的,所述PLC编程控制常通电磁阀(9)和常闭电磁阀(10)分别为常通状态和常闭状态。
一种粉末成型机的阴模平衡控制结构的工作过程,按照以下过程进行:
1)上冲向下压制完成上压、同步压制,下冲不动阴模板(1)通过同步压杆压住下移,及最终加压三加压后压制结束,即180°位置;
2)此时常闭电磁阀(10)在180°位置提前5°-10°通电换向打开,充填复位缸上端通气并使上端压力稍大于下端通气后的压力,同时常通电磁阀(9)通电换向至堵死的出气端,即设定为180°位置提前0°-5°;
3)气缸的活塞下端气体被封闭在气缸中,此时即使活塞上端压力稍大也无法将活塞推动下移,即连接在复位缸上的下横梁(7)被停止在此位置不动,也即通过相关联件连接在下横梁(7)上的阴模板(1)被平衡在压制结束位置不动,完成既不向上反弹动作又不向下移动的控制;
4)接着脱模杆(3)下移推动下横梁7向下移动开始脱模,此时连接下横梁(7)的气缸活塞跟随下移,气缸的下部的密封气体被逐渐压缩变大,当达到溢流阀(11)设定的溢流压力时,溢流阀(11)的阀打开排气,脱模杆(3)顺利向下运行完成脱模过程;
5)在270°脱模结束前常通电磁阀(9)及常闭电磁阀(10)提前动作恢复其常通及常闭状态,动作过程进入下一个流程。
本发明的优点是:1)以往采用机械挡块的方式来防止阴模反弹,无法单独控制阴模板的停止位置,需与阴模支撑挡块同时联动调整,否则会产生相互干涉而压坏机器,限制了制品的调整压制范围。采用气动控制方式来进行控制阴模平衡,可在任何位置单独来进行阴模防反弹控制,可完全取代原机械止挡阴模反弹的结构形式,可做到制品压制的无死点调整,拓宽了机器制品压制的调整及应用范围。
2)增加本气动控制形式后,解决了原平衡压力无法调整准确的实际操作难点,只需将充填复位缸的上部压力调整稍大,即可有效防止阴模反弹,也可防止阴模被压下的现状,保证制品压制脱模后的正品率。
3)采用气动控制阴模平衡的方法,较之以往机械平衡的结构气控形式简单、方便,几乎无制造周期,可进一步减小劳动强度,降低了生产制造及售后服务、产品维护成本。
附图说明
图1为本发明的结构示意图。
图2为图1的A部放大图。
图3为图1的B部放大图。
具体实施方式
下面结合附图对本发明做进一步说明,以更好了解本发明:
工作开始前将11液流阀的溢流压力设定为系统压力0.7-0.8MPa,通过编程控制常通电磁阀9和常闭电磁阀10分别为常通状态和常闭状态,将常通电磁阀9换向后的排气口用堵头堵掉。开始压制时模架上安装模具的阴模板1通过导柱2连接在模架线连接板4上,并通过下T型头5 、下滑柱6最终连接在下横梁7上。下横梁7的两端与2只充填复位缸8相固结,并通过充填复位缸8的向上驱动完成阴模板1的充填复位功能。此时上冲向下压制完成上压、同步压制(下冲不动阴模板1通过同步压杆压住下移)及最终加压三加压后压制结束(180°位置)。此时常闭电磁阀10在180°位置提前5°-10°通电换向打开,充填复位缸上端通气并使上端压力稍大于下端通气后的压力,同时常通电磁阀9通电换向至堵死的出气端(设定为180°位置提前0°-5°),于是气缸的活塞下端气体被封闭在气缸中,此时即使活塞上端压力稍大也无法将活塞推动下移,即连接在复位缸上的下横梁7被停止在此位置不动,也即通过相关联件连接在下横梁7上的阴模板1被平衡在压制结束位置不动,完成既不向上反弹动作又不向下移动的控制。接着脱模杆3下移推动下横梁7向下移动开始脱模,此时连接下横梁7的气缸活塞跟随下移,气缸的下部的密封气体被逐渐压缩变大,当达到溢流阀11设定的溢流压力时,溢流阀11的阀打开排气,脱模杆3顺利向下运行完成脱模过程。在270°脱模结束前常通电磁阀9及常闭电磁阀10提前动作恢复其常通及常闭状态,动作过程进入下一个流程。
本控制方法原理是将气缸上部压力适当调大以确保阴模不向上反弹,同时通过气控方法使气缸下部活塞下部缸内既不进气也不排气,即保持气缸下腔内的气体容量不变,这样就不会因上腔压力大而使活塞向下运动带动阴模下移,仅会因气体的可压缩性使阴模向下微量移动,不会影响制品的装模调模。脱模时脱模杆驱动下横梁带动活塞下行,当下腔达到设定的液流气压值时,液流阀打开通气,脱模杆继续下行推动活塞正常向下运行完成脱模动作的过程,解决了原来结构存在着的问题。
- 一种粉末成型机的阴模平衡控制结构及其工作过程
- 一种超大型粉末成型机的阴模平衡装置及其液压系统控制方法