一种自动出菜机及智能出菜系统
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及自动化设备的技术领域,具体涉及一种自动出菜机及智能出菜系统。
背景技术
目前,火锅等餐饮行业上还没有能实现代替人工的送菜的自动化设备,人工配菜、出菜具有较多缺陷,例如,需要多个服务生专门负责在送菜取菜;菜品储存处是敞开式的,易受到环境的影响,卫生情况难以控制,且人体操作过程中难以避免地会对食品造成污染;对于餐饮经营者而言劳动力成本逐渐攀升;食材的种类、数量、保质期等信息不容易集中处理等等,因此餐饮行业进行朝智能及自动化发展已成当下的一种趋势。
发明内容
为了克服上述现有技术的不足,现提出一种自动出菜机及智能出菜系统。
本发明通过如下技术方案实现:
一种自动出菜机,包括配菜机构和出菜输送线,配菜机构将菜品分配至出菜输送线,并由出菜输送线往后端传送,其特征在于:出菜输送线包括餐盘输送线,将餐盘输送至配菜机构处,配菜机构包括货架和分配装置,分配装置将货架上方多个货品进行分配转移至餐盘上,随同餐盘往后端传送出菜。
进一步地,所述分配装置为三维机械臂,货架一侧设置三维机械臂,三维机械臂移取货架上的货品,货架上设置若干货道,货品按类别摆放于相应货道上,货架将货品自动推至货道靠近三维机械臂的一侧,三维机械臂可三维移动,移动至所需货品种类的货道将最靠近的货品取出并往出菜输送线传递。
进一步地,包括若干数量的货架和三维机械臂,每个单元的货架配置相应的三维机械臂,亦可数量比不为1:1,即由单个三维机械臂负责多个货架单元或多个三维机械臂负责单个货架单元,但如此设置效率较低或三维机械臂工作区域划分混乱。
进一步地,所述三维机械臂包括机械夹爪、x向直线模组和y向直线模组,机械夹爪包括相连的夹具和伸缩臂,伸缩臂带动夹具在y轴方向直线运动,x向直线模组和y向直线模组分别控制机械夹爪在x轴、y轴方向直线运动。
进一步地,所述伸缩臂为三段式结构,包括固定段、中段、活动段,三者互相叠合滑动,以固定段为相对运动的参考系,中段及活动段可滑动延展。
进一步地,所述夹具包括滑台气缸和手指连接件,滑台气缸包括导轨和导轨上滑动连接的两个气缸滑块,气缸滑块通过手指连接件与手指连接,从而控制两个手指的间距。除了滑台气缸,亦可使用其它结构控制手指夹持,包括蜗轮蜗杆、凸轮滑槽、丝杠等结构均可实现。
进一步地,所述出菜输送线包括输送线A段、输送线B段和输送线C段,输送线A段的起始端设置有投放口,输送线A段的后端安装有机械手和第一顶升机构,机械手将输送线上的餐盘单一转移到第一顶升机构上,餐盘由第一顶升机构顶升至输送线B段,并往后端安装的第二顶升机构传送,餐盘由第二顶升机构顶升并传送至输送线C段。
进一步地,所述第二顶升机构顶升餐盘,并进行改向传送,传送至输送线C段,这样设置占地面积小,且能分开餐盘放置区域和取菜区域,避免冲突。
进一步地,所述机械手包括执行机构、升降模组和平移模组,平移模组与升降模组为直线模组,升降模组垂直立设在平移模组上并进行水平移动,执行机构包括吸盘和吸盘座,吸盘座底部安装有若干吸盘,吸盘座与升降模组连接,升降模组控制吸盘座垂直移动,机械手执行机构亦可使用夹爪。
进一步地,所述执行机构下方为餐盘的存放区,存放区的一侧竖直设置有隔板。
进一步地,所述隔板上设置若干不同高度的第三传感器,用于检测感应存放区里的待转移物的数量或高度。
进一步地,所述第一顶升机构包括第一顶升装置和顶升输送带,顶升输送带进行水平输送,第一顶升装置带动顶升输送带进行竖直升降。
进一步地,所述第二顶升机构包括第二顶升装置、外输送带、和内输送带,外输送带具有两条,分别安装在内输送带两侧,外输送带设置有同步轮、连接轴和驱动装置,两条外输送带的同步轮之间安装有连接轴,驱动装置控制同步轮回转,使两条外输送带同步输送,内输送带底部固定第二顶升装置,第二顶升装置控制内输送带相对于外输送带进行升降运动。
进一步地,所述输送线C段设置有取菜处,取菜处上方安装有若干搁置架用于临时搁置菜盘及其盖子等。
进一步地,所述输送线C段的输送带上安装有RFID读写器,用于读写菜品外盒内预置的芯片等射频标签。
进一步地,所述输送线C段的设置有扫描器及打印机组件,打印机打印票据、菜品信息等,扫描器用于扫码。
进一步地,所述出菜输送线全体分段设置,分成若干单位,便于输送和组装。
进一步地,所述货架包括机架和滑道,机架上倾斜地设置有若干滑道,滑道的高、低两端分别架设在高位横梁和低位横梁上,单个的高位横梁和低位横梁为一组,机架在竖直方向上设置有若干组高位横梁和低位横梁,每组上方排列若干滑道。滑道可拆卸地安装在机架上。
进一步地,所述高位横梁上安装若干高位卡持件,低位横梁上安装若干低位卡持件,滑道卡持在高位卡持件与低位卡持件之间。
进一步地,所述货架上安装有若干RFID读写器。
进一步地,所述高位卡持件的侧面上安装有若干指示灯或显示器,指示灯由后台系统控制,以不同数量或灭亮状态或灯光颜色等来表示滑道的不同工作状态,显示器可显示数字,可用于表示滑道上菜品数量或需补货、已补货等数据。
进一步地,所述低位卡持件靠近滑道的侧面上安装有软质的缓冲件。
进一步地,所述机架上安装有振动器,可使货架整体振动,防止菜盒停滞于滑道上,影响出菜。
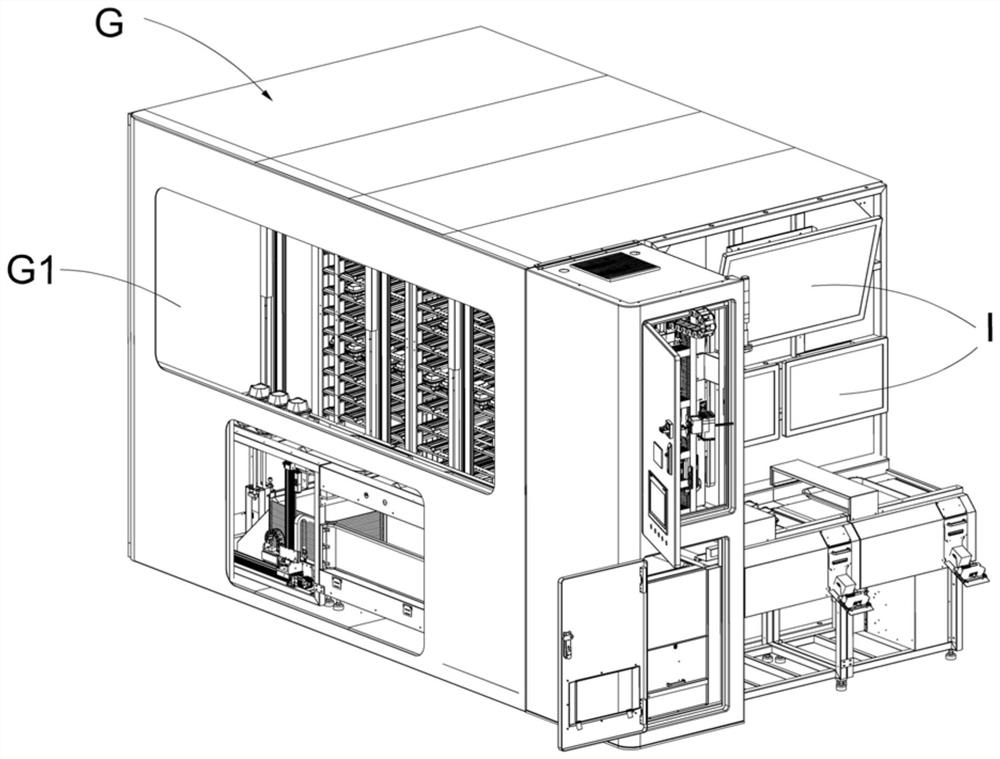
进一步地,包括外壳体,罩在配菜机构和出菜输送线外部,出菜输送线的一部分探出外壳体裸露在外。
进一步地,所述出菜输送线探出外壳体处安装有门体,在停止送菜时可关闭,保持内部环境温度、保证货架卫生。
进一步地,所述外壳体上设置有橱窗,橱窗上安装调光玻璃,调光玻璃可透明化,也可雾化。
进一步地,所述外壳体外侧设置有若干显示屏,用于显示菜单信息、库存信息、菜品保质期信息、顾客信息等。
进一步地,所述外壳体内部安装有制冷装置,使自动出菜机具有冷库功能。
一种智能出菜系统,包括权利要求上任一所述的自动出菜机,包括点餐模块、出菜模块、送餐模块、中心控制模块、数据库,其中,自动出菜机即出菜模块,顾客通过点餐模块选择所需菜品,形成菜单发送到中心控制模块和数据库,中心控制模块发送指令到出菜模块,出菜模块进行分拣配菜并出菜,菜品由送餐模块接收并移送至顾客指定地点。
进一步地,所述出菜模块包括货架单元和分拣单元,货架单元上设置若干货道,每条货道上放置若干菜品,每条货道负责单一品种的菜品,分拣单元根据中心控制模块所发出的指令移动到相应货道处并转移出所需菜品。
进一步地,所述出菜模块包括出菜感应单元,出菜模块中菜品传出时经过出菜感应单元,出菜的菜品信息发送到数据库,出菜的菜品信息如菜品种类、重量、保质期等信息。
进一步地,所述出菜模块包括扫描单元或打印单元,送餐模块领取菜品时出示电子标签,由扫描单元扫描并录入送餐模块信息,发送到数据库,打印单元打印菜单信息或顾客信息,送餐模块可以是机器人或者人工,每一机器人或者人工都具有单独的电子标签,取菜信息录入数据库中便于溯源和员工绩效统计。
进一步地,所述出菜模块包括显示单元,显示单元显示菜单信息、顾客信息、库存内菜品信息、送餐模块信息之中的一个或多个信息,显示单元可以是显示器,便于顾客和员工直观获取信息。
进一步地,所述货架单元具有两种模式,分别为出菜模式和补菜模式,处于出菜模式或补菜模式时,货架单元将各个货道上的菜品推至货道前排,便于分拣单元抓取或货道另一端补货。
进一步地,所述货架单元包括RFID读写器,处于补菜模式时,RFID读写器读写补入货道都菜品信息、菜品数量发送至数据库。
进一步地,所述货架单元包括指示灯和显示器,处于补菜模式时,中心控制模块发送指令到指示灯和显示器,当补充一个品种的菜品时,储放相应品种的货道上的指示灯给予外界指示,该货道的显示器显示需补充菜品数量或货道上菜品数量。
进一步地,所述货架单元包括指示灯和显示器,处于补菜模式时,存放相同种类菜品的多个货道对应单一的电子标签,当外部的读写器读写该电子标签时,此种类菜品的多个货道上的指示灯或显示器统一相应。例如,一箱单一种类的菜,其箱体外贴有二维码,当用扫码器扫描时,存放该种类菜品的货道上的指示灯或显示器均给到指示,便于补货。
本发明相对于现有技术,具有以下有益效果:
1、实现智能配菜,自动化出菜,大大提升了出菜效率,能够减轻人工的劳动强度,降低运营成本,提高餐饮卫生条件。
2、自动出菜机的应用范围广,可用于火锅店、麻辣烫等餐饮店中,可用于餐厅后厨中,亦可作为食品冷库使用。
3、采用单一餐盘上分配菜品的形式,便于后端机器人或人工送餐。
4、自动出菜机内设置制冷装置,可冷藏保险菜品,具有冷库功能。
5、菜单信息、顾客信息、库存内菜品信息、送餐模块信息、补菜信息等数据录入数据库,便于菜品统计、保质期监控、信息溯源。
6、自动出菜机占地面积小,结构易于分拆运输。
7、本发明可以作为智能厨房或餐饮输送线的一部分。
附图说明
图1为自动出菜机的立体图;
图2为自动出菜机内部结构的立体图;
图3为出菜输送线的立体图;
图4为输送线A段末端的机械手和第一顶升机构的主视图;
图5为输送线A段末端的机械手和第一顶升机构的立体图;
图6为第一顶升机构的立体图;
图7为机械手的立体图;
图8为第二顶升机构和投放口的立体图;
图9为第二顶升机构的立体图;
图10为外输送带的立体图;
图11为手提门的立体图。
图12为配菜机构的立体图;
图13为三维机械臂的立体图;
图14为机械夹爪的立体图;
图15为伸缩臂的分解图;
图16为伸缩臂的立体图;
图17为夹具的立体图;
图18为货架的立体图;
图19为高位卡持件和低位卡持件的立体图;
图20为滑道的立体图;
图21为菜盒的立体图。
附图标记说明如下:A-输送线A段
A1-机械手;A11-执行机构;A111-吸盘;A112-吸盘座;A113-第一传感器;A12-升降模组;A121-第一滑块;A122-第一轨梁;A123-第一连接件;A13-平移模组;A131-第二滑块;A132-第二轨梁;A133-第二连接件;A14-直线导轨组件;A141-A导轨;A142-第三滑块;A143-第三连接件;A2-第一顶升机构;A21-第一顶升装置;A211-第一气缸;A212-辅助杆;A22-顶升输送带;A221-第二传感器;A222-托板件;A223-输送带主体;A3-手提门;A31-门板;A32-导杆;A33-导向套;A34-齿条;A35-齿轮;A5-隔板;A51-第三传感器;A7-存放区;A8-投放口;B-输送线B段;B1-第二顶升机构;B11-第二气缸;B12-承托座;B13-B导轨;B14-B滑块;B15-B连接件;B16-B托板;B2-外输送带;B21-同步轮;B22-连接轴;B3-内输送带;C-输送线C段;C1-搁置架;C2-扫描器及打印机组件;E-三维机械臂;E1-夹具;E11-手指;E111-卡扣槽;E12-滑台气缸;E121-气缸滑块;E13-手指连接件;E14-夹具传感器;E2-伸缩臂;E21-固定段;E211-固定座;E212-固定段滑块;E22-中段;E221-中段梁体;E222-上导轨;E223-下导轨;E224-第一齿条面;E225-中段滑块;E23-活动段;E231-活动段梁体;E232-第二齿条面;E233-第三齿条面;E234-活动段导轨;E31-第一驱动装置;E32-第二驱动装置;E33-第三驱动装置;E4-夹具连接件;E5-x向直线模组;E51-底部直线模组;E52-顶部导轨组件;E6-y向直线模组;F-货架;F1-机架;F11-高位横梁;F12-低位横梁;F13-高位卡持件;F131-指示灯;F132-显示器;F14-低位卡持件;F15-缓冲件;F16-堵头;F2-滑道;F21-凸轨;F5-上盖体;F6-下盒体;F61-凹陷部;G-外壳体;G1-橱窗;H-门体;I-显示屏。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。在发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
请综合参阅图1和图2,本发明较佳实施例一种自动出菜机,包括配菜机构和出菜输送线,配菜机构将菜品分配至出菜输送线,并由出菜输送线往后端传送,出菜输送线包括餐盘输送线,餐盘由底层放入,往上层输送,经过配菜机构时,三维机械臂E往餐盘上摆放菜品,随同餐盘往后端传送出菜。
如图12所示,配菜机构包括若干单元的货架F和三维机械臂E,两者分别如图13、图18所示,每个单元的货架F前端补货,后端配置安装三维机械臂E,三维机械臂E可在三维方向(附图中坐标系所示)上移取货架F上的货品,货架F上设置若干货道,菜品适用菜盒包装并按类别摆放于相应货道上,每条货道可放置多个菜盒,货架F将菜盒自动推至货道靠近三维机械臂E的一侧,三维机械臂E可三维移动,移动至所需菜品种类的货道将最近的菜盒取出并往外传递,实现自动化配菜。每个单元的货架配置相应的三维机械臂,亦可数量比不为1:1,即由单个三维机械臂负责多个货架单元或多个三维机械臂负责单个货架单元,但如此设置效率较低或三维机械臂工作区域划分混乱。
如图13所示,三维机械臂E包括机械夹爪、x向直线模组E5和y向直线模组E6,机械夹爪包括相连的夹具E1和伸缩臂E2,伸缩臂E2带动夹具E1在y轴方向直线运动,x向直线模组E5和y向直线模组E6分别控制机械夹爪在x轴、y轴方向直线运动。即将机械夹爪安装在二维直线模组上,以定子-动子的模式移动,包括x向直线模组E5和y向直线模组E6,本实施例采用同步带直线模组,亦可使用其它直线运动机构替代,机械夹爪的伸缩方向为坐标系的z轴方向,机械夹爪垂直滑动连接在y向直线模组E6上,y向直线模组E6竖直滑动连接在x向直线模组E5上,形成一个笛卡尔机器人。x向直线模组E5包括底部直线模组E51和顶部导轨模组E52,底部直线模组E51控制y向直线模组E6运动,顶部导轨模组52进行顶部限位,使三维机械臂运动更加稳定。
如图14所示,机械夹爪,包括夹具E1和伸缩臂E2,伸缩臂E2为三段式结构,包括固定段E21、中段E22、活动段E23,三者互相叠合滑动,可滑动展开,且两两限位连接,通过挡板或优力胶限位,或U型光电开关以及勾形感应片组件限位,防止脱轨。
请综合参阅图14、图15、图16,中段E22的直线运动由第一驱动装置E31控制,活动段E23的直线运动由第二驱动装置E32控制,夹具E1在活动段E23上的滑动由第三驱动装置E33控制。驱动装置可采用步进电机或伺服电机等。
请综合参阅图14、图15、图16,固定段E21包括固定座E211和固定段滑块E212,固定座E211为L型钣金,固定段滑块E212固定安装在固定座E211上。
中段E22包括中段梁体E221、下导轨E223和第一齿条面E224,中段梁体E221底部设置下导轨E223,下导轨E223与固定段滑块E212滑动连接,中段梁体E221上设置有第一齿条面E224,第一齿条面E224与下导轨E223的延伸方向相同,固定段E21上安装第一驱动装置E31,控制一齿轮自转,该齿轮与第一齿条面E224啮合,从而控制中段E22滑动。
中段E22还包括上导轨E222和中段滑块E225,上导轨E222设置在中段梁体E221的顶面,中段滑块E225与上导轨E222滑动连接,中段滑块E225与活动段E23固定连接;第二驱动装置E32安装在中段E22上,跟随中段E22运动;活动段E23包括活动段梁体E231和第二齿条面E232,第二齿条面E232设置在活动段梁体E231上,第二驱动装置E32控制一齿轮自转,该齿轮与第二齿条面E232啮合,从而控制活动段E23滑动。
请综合参阅图16、图17,第三驱动装置E33和夹具连接件E4,第三驱动装置E33通过夹具连接件E4与夹具E1连接,第三驱动装置E33控制夹具E1在活动段E23上直线运动。活动段E23包括第三齿条面E233和活动段导轨E234,均设置在活动段梁体E231上,活动段导轨E234上滑动连接有滑块,滑块与夹具连接件E4固定连接;第三驱动装置E33控制一齿轮自转,该齿轮与第三齿条面E233啮合,从而控制夹具E1在活动段E23上滑动。
夹具E1包括手指E11、滑台气缸E12、手指连接件E13、夹具传感器E14,手指E11为平行式气动手指,滑台气缸E12包括导轨和导轨上滑动连接的两个气缸滑块1E21,气缸滑块E121通过手指连接件E13与手指E11连接,从而控制两个手指E11的间距。手指E11的夹持部呈长条形,上方凹设有卡扣槽E111,便于稳定卡持或托持待转移物。除了滑台气缸,亦可使用其它结构控制手指夹持,包括蜗轮蜗杆、推进机构配合凸轮或滑槽、丝杠等结构均可实现。手指连接件E13上安装有夹具传感器E14,用于感应夹具E1是否夹取到物品。
如图18所示,货架F包括机架F1和成排倾斜架设在机架F1上的滑道F2,机架F1一侧面上横向安装有成列的高位横梁F11,与其相对的面上相应地安装成列的低位横梁F12,单个的高位横梁F11和低位横梁F12为一组,机架F1在竖直方向上设置有若干组高位横梁F11和低位横梁F12,每组上方排列若干滑道F2,滑道F2可拆卸地安装在机架F1上。
高位横梁F11上排列高位卡持件F13,高位卡持件F13如图13所示,为方块状,两侧边较高用于防偏,内嵌有RFID读写器,用于读写菜盒上的电子标签,其前侧面安装有指示灯F131以及显示器F132,指示灯F131由后台系统控制,以不同数量或灭亮状态或灯光颜色等来表示滑道的不同工作状态,显示器F132可显示数字,可用于表示滑道上菜品数量或需补货、已补货等数据,高位横梁F11上安装有长条块状的堵头F16,用于卡紧滑道。
如图19所示,低位卡持件F14上亦安装有长条块状的堵头F16,低位卡持件14的前侧面安装有脚垫等软质的缓冲件F15,用于缓冲滑下的菜盒。滑道F2卡持在高位卡持件F13及低位卡持件F14中间,滑道F2与水平面的倾斜角最优为3.8度。
请综合参阅图20和图21,滑道F2中间具有突起的凸轨F21,用于卡紧两端的堵头F16,以及更好地限定其上方的菜盒的滑动轨迹,菜盒包括上盖体5及下盒体F6,下盒体F6底部设置有凹陷部F61,适配于凸轨F21,且下盒体F6可内嵌芯片等RFID电子标签,可被高位卡持件F13内的读写器识别,实际运用到识别菜品种类以及出货补货的数量统计。机架F1上没横排可安装多个滑道F2,图18为了易读性只设置了一列,实际可根据需求设置多排多列,且可设置多个货架进行自由组装,灵活性高。机架F1上安装有振动器,可使货架整体振动,防止菜盒停滞于滑道上,影响出菜。
如图3所示,出菜输送线主体采用输送带输送,外部由钢架支撑,整体将输送带分上下层,以传送叠放的餐盘为例,输送线流程如下:成摞的餐盘被放置进入从下层的投放口A8,沿输送线A段A的输送带进入存放区A7,机械手A1使用吸盘将单个餐盘吸起,向后端平移,并放置在第一顶升机构A2上(此时第一顶升机构A2处于低位),第一顶升机构A2将餐盘顶升至上层,沿着输送线B段B的输送带被传送至拐角处,在输送线B段B的输送过程中可供外界的配菜机构往餐盘上摆放菜品,拐角设置有第二顶升机构B1,第二顶升机构B1上升将餐盘及菜品顶升并换向90度进行传送入输送线C段,输送线C段设置为取菜处,可人工或机器人扫描取菜。
如图3所示,出菜输送线全体分段设置,分成若干节单位,便于运输和组装。
请综合参阅图4、图5,为机械手A1和第一顶升机构A2所在单元,存放区A7的一侧安装有隔板A5,隔板A5上设置有隔板A5上设置若干不同高度的第三传感器A51,可用于检测感应存放区A7里的待转移物的数量或高度,如测叠起的餐盘的数量或高度。
如图6所示,为第一顶升机构A22,第一顶升机构A22包括第一顶升装置A21、顶升输送带A22,顶升输送带A22自身可水平输送物品,第一顶升装置A21安装在顶升输送带A22下方,控制其整体升降。本实施例中,第一顶升装置A21采用双杆的第一气缸A211及辅助杆A212,结构简单、成本低,第一顶升装置A21可采用其它直线运动装置替换。顶升输送带A22的输送带主体A223底部安装有托板件A222,第一顶升装置A21的伸缩端以及辅助杆A212与托板件A222固定,辅助杆A212另一端被通孔限制运动,使其只能升降运动,辅助杆A212的设置可增加升降稳定性。优选地,顶升输送带A22下方、第一气缸A211一侧安装有油压缓冲器213。顶升输送带A22上设置有第二传感器A221,用于判断输送带上是否接收到了待转移物。
如图7所示,为机械手A1,可进行二维移取物品,机械手A1包括执行机构A11、升降模组A12、平移模组A13、直线导轨组件A14。平移模组A13、直线导轨组件A14实现其水平移动功能,如图4中所示,平移模组A13安装在外部钢架底部的一侧,直线导轨组件A14安装在同一竖直面的上方,外部钢架的上横梁处,如此设置,为存放区A7预留足够空间,使整体装置空间利用率高。
在本实施例中平移模组A13采用同步带直线模组,亦可实用其他线性模组或直线传动机构,例如丝杆模组、电缸模组、气缸等等,均可实现技术效果。平移模组A13包括第二滑块A131、第二轨梁A132、第二连接件A133,第二滑块A131在第二轨梁A132上线性运动,第二轨梁A132首尾处均安装有限位件和垫片,垫片可采用优力胶等减震材料。
平移模组A13以及直线导轨组件A14相互平行安装于竖直面上,两者之间竖直架设有升降模组A12,同理的,在本实施例中升降模组A12采用同步带直线模组,亦可实用其他线性模组,例如丝杆模组、电缸模组等等,均可实现技术效果。升降模组A12包括第一滑块A121、第一轨梁A122和第一连接件A123,第一轨梁A122的顶端安装有第三连接件A143,为U型连接板,并与直线导轨组件A14的两个第三滑块A142固定连接,第一轨梁A122的底部固定有第二连接件A133,为L型连接板,并与第二滑块A131固定连接,第二滑块A131带动升降模组A12整体水平运动,直线导轨组件A14的安装可以使其运动更加稳定。
升降模组A12的第一滑块A121上通过第一连接件A123固定有吸盘座A112,吸盘座A112上开孔,通过吸盘金具安装有若干吸盘A111,优选地,本实施例采用风琴型的真空吸盘及其配套的真空发生器、气管、真空破坏阀等,真空吸盘干净清洁,满足食品行业的需求,采用风琴型吸盘,具有一定缓冲功能,免于安装缓冲装置。执行机构A11亦可采用磁力吸盘或具有气动手指的机械夹爪等,真空吸盘为优选。真空吸盘座A112底面安装有若干第一传感器A113,可用于检测是否吸取到待转移物,或检测待转移物的堆叠高度。本实施例中升降模组A12、平移模组A13采用伺服电机进行驱动,伺服电机亦可采用进步电机等其他驱动机构进行替代。
如图8所示,为第二顶升机构B1和手提门A3所在单元,第二顶升机构B1设置在该单元的中上部位,将菜品和餐盘进行顶升及转向输送,该单位下层为投放口A8,投放口A8处安装有手提门A3。
请综合参阅图8、图9、图10第二顶升机构B1包括第二顶升装置、外输送带B2、内输送带B3,外输送带B2具有两条,分别安装在内输送带B3两侧。
如图10所示,外输送带B2呈框状,内输送待3则在其中部空出部位上下升降。外输送带B2设置有同步轮B21、连接轴B22和驱动装置,两条外输送带B2的同步轮B21之间通过联轴器安装有连接轴B22,驱动装置控制同步轮B21回转,使两条外输送带B2同步输送。
如图9所示,内输送带B3底部固定第二顶升装置,内输送带B3自身可进行水平方向传送。第二顶升装置控制内输送带B3相对于外输送带B2进行升降运动。第二顶升装置包括第二气缸B11、承托座B12、B导轨B13、B滑块B14、B连接件B15和B托板B16。
承托座B12设置在最底部,承托座B12成L型,承托座B12上表面的两端分别竖直安装有第二气缸B11和B导轨B13,第二气缸B11的活塞杆向上伸缩,B导轨B13方向为竖直方向,B导轨B13上设置有可沿其上下滑动的若干B滑块B14。B滑块B14、B托板B16和第二气缸B11的导杆三者之间通过B连接件B15固定连接,B连接件B15为大小两个固定连接的倒L型钣金,大的顶部固定B托板B16、侧面固定滑块,小的固定第二气缸B11的活塞杆,如此一来,第二气缸B11的活塞杆运动时,带动B连接件B15、B滑块B14、B托板B16进行垂直运动,B托板B16安装在内输送带B3的底部,从而控制内输送带B3升降。
上述第二顶升装置为较优设置,使用其他直线升降机构亦可替代。
请综合参阅图8、图11,手提门A3包括门板A31、导杆A32、导向套A33、齿条A34、齿轮A35;导杆A32设置有2根,竖直安装在外部钢架一侧面上,相互平行,导杆A32上套设有若干导向套A33,导向套A33可沿导杆A32滑动,导向套A33与门板A31固定连接,带动门板A31上下滑动,门板A31固定一竖向齿条A34,外部钢架上相应位置安装一可转动的齿轮A35,齿条A34与齿轮A35啮合,门板A31上提时,齿条A34上移带动齿轮A35滚动,门板A31的正面设置有提手,可供使用者上拉。
如图3所示,输送线C段C设置有取菜处,输送带上方安装有若干工形的搁置架C1,可供取餐时临时放置菜盘及其盖子等,输送带内安装有若干RFID读写器,用于读写菜品外盒内预置的芯片等射频标签,记录送菜信息。取菜处外部钢架的一侧安装有若干扫描器及打印机组件,可供人工或机器人取菜时扫码记录取菜人信息,便于朔源及绩效统计,打印机用于打印票据、菜品信息等。
一种智能出菜系统,包括点餐模块、出菜模块、送餐模块、中心控制模块、数据库,其中,自动出菜机即出菜模块,顾客通过点餐模块选择所需菜品,形成菜单发送到中心控制模块和数据库,中心控制模块发送指令到出菜模块,出菜模块进行分拣配菜并出菜,菜品由送餐模块接收并移送至顾客指定地点。
出菜模块包括货架单元和分拣单元,货架单元和分拣单元可以代入到出菜机的货架和三维机械臂,货架单元上设置若干货道,每条货道上放置若干菜品,每条货道负责单一品种的菜品,分拣单元根据中心控制模块所发出的指令移动到相应货道处并转移出所需菜品。
出菜模块包括出菜感应单元,出菜模块中菜品传出时经过出菜感应单元,出菜的菜品信息发送到数据库,出菜的菜品信息如菜品种类、重量、保质期等信息。库存不足或保质期到期时,可以报警并进行补菜或换菜。
出菜模块包括扫描单元或打印单元,送餐模块领取菜品时出示电子标签,由扫描单元扫描并录入送餐模块信息,发送到数据库,打印单元打印菜单信息或顾客信息,送餐模块可以是机器人或者人工,每一机器人或者人工都具有单独的电子标签,可以查询到该顾客的菜品是哪位人工或哪台机器人送餐,取菜信息录入数据库中便于溯源和员工绩效统计,溯源的作用例如:当顾客用餐完一段时间出现不适状况,餐厅可以查询到顾客用餐信息,用餐时间,菜品种类,菜品进货渠道、菜品保质期等等。
出菜模块包括显示单元,显示单元显示菜单信息、顾客信息、库存内菜品信息、送餐模块信息之中的一个或多个信息,显示单元可以是显示器,便于顾客和员工直观获取信息。
货架单元具有两种模式,分别为出菜模式和补菜模式,处于出菜模式或补菜模式时,货架单元将各个货道上的菜品推至货道前排,便于分拣单元抓取或货道另一端补货。
货架单元包括RFID读写器,在高位卡持件F13内,处于补菜模式时,RFID读写器读写补入货道菜品信息、数量发送至数据库。
货架单元包括指示灯和显示器,处于补菜模式时,中心控制模块发送指令到指示灯和显示器,当补充一个品种的菜品时,储放相应品种的货道上的指示灯给予外界指示,该货道的显示器显示需补充菜品数量或货道上菜品数量。
所述货架单元包括指示灯和显示器,处于补菜模式时,存放相同种类菜品的多个货道对应单一的电子标签,当外部的读写器读写该电子标签时,此种类菜品的多个货道上的指示灯或显示器统一相应。例如,一箱单一种类的菜,其箱体外贴有二维码,当用扫码器扫描时,存放该种类菜品的货道上的指示灯或显示器均给到指示,便于补货。
综上,本发明可以实现智能配菜,自动化出菜,大大提升了出菜效率,能够减轻人工的劳动强度,降低运营成本,提高餐饮卫生条件;自动出菜机的应用范围广,可用于火锅店、麻辣烫等餐饮店中,可用于餐厅后厨中,亦可作为食品冷库使用;采用单一餐盘上分配菜品的形式,便于后端机器人或人工送餐;自动出菜机内设置制冷装置,可冷藏保险菜品,具有冷库功能;菜单信息、顾客信息、库存内菜品信息、送餐模块信息、补菜信息等数据录入数据库,便于菜品统计、保质期监控、信息溯源;自动出菜机占地面积小,结构易于分拆运输;本发明可以作为智能厨房或餐饮输送线的一部分。
以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均同理包括。
- 一种自动出菜机及智能出菜系统
- 一种自动出菜机