一种多机器人协同搬运控制方法及装置
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及协同控制技术领域,尤其涉及一种多机器人协同搬运控制方法及装置。
背景技术
多机器人具备比单机器人更出的任务执行能力,例如凭借更多的自由度可以完成更加复杂的任务,更强的负载能力可以完成大、重型物体的搬运任务。但是在多机搬运过程中,由于机器人均对物体有抓持作用,在一般情况下,机器人与物体之间不存在相对移动,因此将存在复杂的结构闭链。因此,各个机器人必须在搬运过程中互相协调:具体体现在:物理上结构闭链的性质使得机器人的末端执行器运动必须相互同步,不产生相对滑移;第二,各个机器人均存在各自的关节角等约束,在同步搬运中必须兼顾上述因素。
发明内容
本发明的目的在于克服现有技术的不足,本发明提供了一种多机器人协同搬运控制方法及装置,实现多个机器人对共同抓持物体的协同搬运,同时优化系统的整体运动速度。
为了解决上述技术问题,本发明实施例提供了一种多机器人协同搬运控制方法,所述方法包括:
建立多机器人的抓持点与被抓持物质心的运动学模型;
基于所述运动学模型建立多机器人中的各个机器人末端速度与负载的运动关系模型;
基于所述运动关系模型和所述被抓持物质心的运动规律建立协同搬运过程的运动学约束模型;
以各机器人系统的速度优化为指标,同时基于所述运动学约束模型建立多机器人协同搬运的搬运数学模型;
基于多机器人协同搬运的搬运数学模型计算当前时刻的对应机器人加速度变化率,并形成控制指令对对应的机器人进行协同搬运控制。
可选的,所述建立多机器人的抓持点与被抓持物质心的运动学模型,包括:
根据多机器人中的各个机器人末端夹持器对被抓持物的抓持点的位置,建立多机器人的末端运动对被抓持物质心运动的运动学模型。
可选的,所述运动学模型如下:
r
定义向量ω=[ω
即可将上述的(2)式改写为:
其中,r
可选的,所述基于所述运动学模型建立多机器人中的各个机器人末端速度与负载的运动关系模型如下:
其中,J
可选的,所述负载为根据预设的给定轨迹运动,所述被抓持物质心的运动规律满足:
其中,
可选的,所述基于所述运动关系模型和所述被抓持物质心的运动规律建立协同搬运过程的运动学约束模型如下:
并公式(7)曾广描述为:
其中,J
可选的,所述以各机器人系统的速度优化为指标,同时基于所述运动学约束模型建立多机器人协同搬运的搬运数学模型如下:
其中,,J
可选的,所述基于多机器人协同搬运的搬运数学模型计算当前时刻的对应机器人加速度变化率如下:
其中,
另外,本发明实施例还提供了一种多机器人协同搬运控制装置,所述装置包括:
第一建立模块:用于建立多机器人的抓持点与被抓持物质心的运动学模型;
第二建立模块:用于基于所述运动学模型建立多机器人中的各个机器人末端速度与负载的运动关系模型;
第三建立模块:用于基于所述运动关系模型和所述被抓持物质心的运动规律建立协同搬运过程的运动学约束模型;
第四建立模块:用于以各机器人系统的速度优化为指标,同时基于所述运动学约束模型建立多机器人协同搬运的搬运数学模型;
计算控制模块:用于基于多机器人协同搬运的搬运数学模型计算当前时刻的对应机器人加速度变化率,并形成控制指令对对应的机器人进行协同搬运控制。
可选的,所述第一建立模块还用于根据多机器人中的各个机器人末端夹持器对被抓持物的抓持点的位置,建立多机器人的末端运动对被抓持物质心运动的运动学模型。
在本发明实施例中,能够在实现多个机器人对共同抓持物体的协同搬运,同时优化系统的整体运动速度;同时能够避免机器人的关节角、关节角速度超出界限;不需要考虑高阶矩阵的实时求逆问题(由于物理上存在结构闭链,传统基于雅克比求逆方法中,雅克比矩阵为多个机器人雅克比矩阵的级联形式,若直接求逆,所需计算量非常大),无需对该矩阵进行求逆运算,将大大减少运算的复杂度,可以减低机器人的硬件要求,降低成本。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
图1是本发明实施例中的多机器人协同搬运的简单示意图;
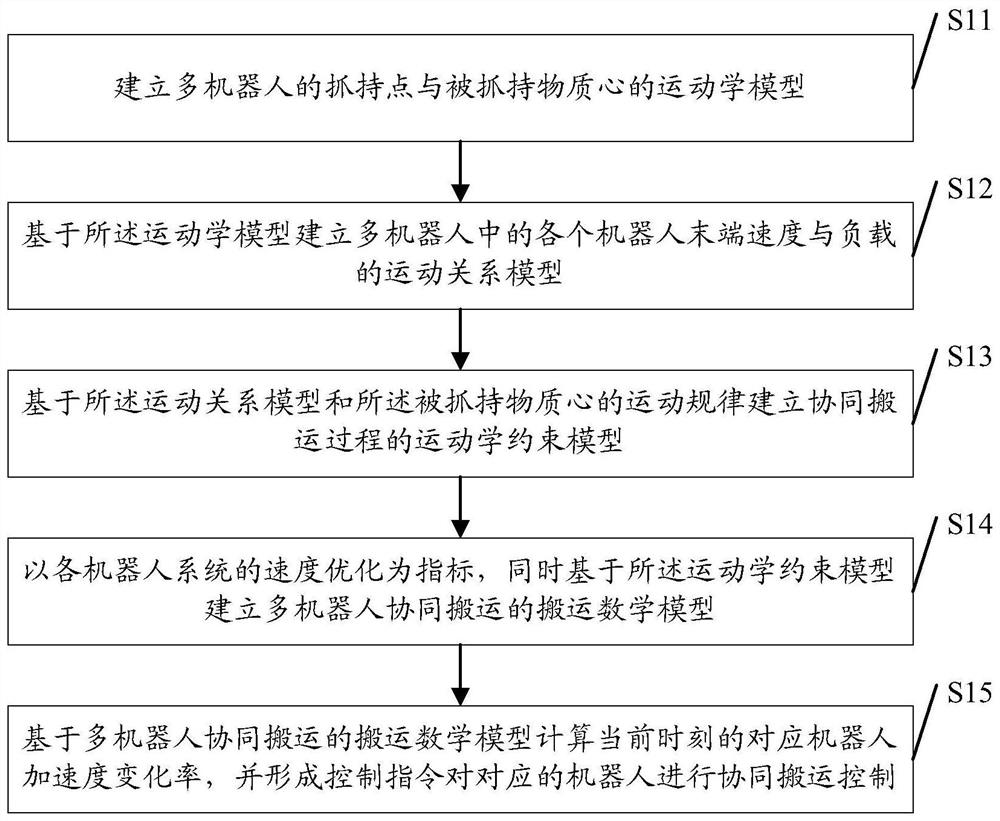
图2是本发明实施例中的多机器人协同搬运控制方法的流程示意图;
图3是本发明实施例中的多机器人协同搬运控制装置的结构组成示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例,请参阅图1和图2;图1是本发明实施例中的多机器人协同搬运的简单示意图;图2是本发明实施例中的多机器人协同搬运控制方法的流程示意图。
如图1和图2所示,一种多机器人协同搬运控制方法,所述方法包括:
S11:建立多机器人的抓持点与被抓持物质心的运动学模型;
在本发明具体实施过程中,所述建立多机器人的抓持点与被抓持物质心的运动学模型,包括:根据多机器人中的各个机器人末端夹持器对被抓持物的抓持点的位置,建立多机器人的末端运动对被抓持物质心运动的运动学模型。
进一步的,所述运动学模型如下:
r
定义向量ω=[ω
即可将上述的(2)式改写为:
其中,r
具体的,根据多机器人中的各个机器人末端的夹持器对被抓持物的抓持点的位置然后建立多机器人的末端运动对被抓持物质心运动的运动学模型,该运动学模型如下:
r
定义向量ω=[ω
将式(3)代入上述的(2)式即可改写为:
其中,r
S12:基于所述运动学模型建立多机器人中的各个机器人末端速度与负载的运动关系模型;
在本发明具体实施过程中,所述基于所述运动学模型建立多机器人中的各个机器人末端速度与负载的运动关系模型如下:
其中,J
进一步的,所述负载为根据预设的给定轨迹运动,所述被抓持物质心的运动规律满足:
其中,
具体的,根据该运动学模型建立各个机器人中各个机器人的末端速度与负载的运动关系模型的关系如下:
所述基于所述运动学模型建立多机器人中的各个机器人末端速度与负载的运动关系模型如下:
其中,J
为了使得负载根据预设的给定轨迹运动,设计被抓持物质心速度的运动规律满足:
其中,
S13:基于所述运动关系模型和所述被抓持物质心的运动规律建立协同搬运过程的运动学约束模型;
在本发明具体实施过程中,所述基于所述运动关系模型和所述被抓持物质心的运动规律建立协同搬运过程的运动学约束模型如下:
并将公式(7)曾广描述为:
其中,J
具体的,在多机器人搬运的过程中,结构闭链、无相对运动的性质,因此,根据运动关系模型和被抓持物质心的运动规律建立协同搬运过程的运动学约束模型如下:
并公式(7)曾广描述为:
其中,J
S14:以各机器人系统的速度优化为指标,同时基于所述运动学约束模型建立多机器人协同搬运的搬运数学模型;
在本发明具体实施过程中,所述以各机器人系统的速度优化为指标,同时基于所述运动学约束模型建立多机器人协同搬运的搬运数学模型如下:
其中,J
具体的,在多机器人协同搬运过程中,以各机器人的系统的速度优化为指标,同时考虑各个机器人对应的机械臂的物理约束量,即运动学约束模型,根据运动学约束模型建立多机器人协同搬运的搬运数学模型如下:
其中,J
S15:基于多机器人协同搬运的搬运数学模型计算当前时刻的对应机器人加速度变化率,并形成控制指令对对应的机器人进行协同搬运控制。
在本发明具体实施过程中,所述基于多机器人协同搬运的搬运数学模型计算当前时刻的对应机器人加速度变化率如下:
其中,
具体的,计算当前时刻的各个机器人加速度变化率,即角加速度指令;具体通过如下公式实现:
其中,
在本发明实施例中,能够在实现多个机器人对共同抓持物体的协同搬运,同时优化系统的整体运动速度;同时能够避免机器人的关节角、关节角速度超出界限;不需要考虑高阶矩阵的实时求逆问题(由于物理上存在结构闭链,传统基于雅克比求逆方法中,雅克比矩阵为多个机器人雅克比矩阵的级联形式,若直接求逆,所需计算量非常大),无需对该矩阵进行求逆运算,将大大减少运算的复杂度,可以减低机器人的硬件要求,降低成本。
实施例
请参阅图3,图3是本发明实施例中的多机器人协同搬运控制装置的结构组成示意图。
如图3所示,一种多机器人协同搬运控制装置,所述装置包括:
第一建立模块21:用于建立多机器人的抓持点与被抓持物质心的运动学模型;
在本发明具体实施过程中,所述建立多机器人的抓持点与被抓持物质心的运动学模型,包括:根据多机器人中的各个机器人末端夹持器对被抓持物的抓持点的位置,建立多机器人的末端运动对被抓持物质心运动的运动学模型。
进一步的,所述运动学模型如下:
r
定义向量ω=[ω
即可将上述的(2)式改写为:
其中,r
具体的,根据多机器人中的各个机器人末端的夹持器对被抓持物的抓持点的位置然后建立多机器人的末端运动对被抓持物质心运动的运动学模型,该运动学模型如下:
r
定义向量ω=[ω
将式(3)代入上述的(2)式即可改写为:
其中,r
第二建立模块22:用于基于所述运动学模型建立多机器人中的各个机器人末端速度与负载的运动关系模型;
在本发明具体实施过程中,所述基于所述运动学模型建立多机器人中的各个机器人末端速度与负载的运动关系模型如下:
其中,J
进一步的,所述负载为根据预设的给定轨迹运动,所述被抓持物质心的运动规律满足:
其中,
具体的,根据该运动学模型建立各个机器人中各个机器人的末端速度与负载的运动关系模型的关系如下:
所述基于所述运动学模型建立多机器人中的各个机器人末端速度与负载的运动关系模型如下:
其中,J
为了使得负载根据预设的给定轨迹运动,设计被抓持物质心速度的运动规律满足:
其中,
第三建立模块23:用于基于所述运动关系模型和所述被抓持物质心的运动规律建立协同搬运过程的运动学约束模型;
在本发明具体实施过程中,所述基于所述运动关系模型和所述被抓持物质心的运动规律建立协同搬运过程的运动学约束模型如下:
并将公式(7)曾广描述为:
其中,J
具体的,在多机器人搬运的过程中,结构闭链、无相对运动的性质,因此,根据运动关系模型和被抓持物质心的运动规律建立协同搬运过程的运动学约束模型如下:
并公式(7)曾广描述为:
其中,J
第四建立模块24:用于以各机器人系统的速度优化为指标,同时基于所述运动学约束模型建立多机器人协同搬运的搬运数学模型;
在本发明具体实施过程中,所述以各机器人系统的速度优化为指标,同时基于所述运动学约束模型建立多机器人协同搬运的搬运数学模型如下:
其中,J
具体的,在多机器人协同搬运过程中,以各机器人的系统的速度优化为指标,同时考虑各个机器人对应的机械臂的物理约束量,即运动学约束模型,根据运动学约束模型建立多机器人协同搬运的搬运数学模型如下:
其中,J
计算控制模块25:用于基于多机器人协同搬运的搬运数学模型计算当前时刻的对应机器人加速度变化率,并形成控制指令对对应的机器人进行协同搬运控制。
在本发明具体实施过程中,所述基于多机器人协同搬运的搬运数学模型计算当前时刻的对应机器人加速度变化率如下:
其中,
具体的,计算当前时刻的各个机器人加速度变化率,即角加速度指令;具体通过如下公式实现:
其中,
可选的,所述第一建立模块还用于根据多机器人中的各个机器人末端夹持器对被抓持物的抓持点的位置,建立多机器人的末端运动对被抓持物质心运动的运动学模型。
在本发明实施例中,能够在实现多个机器人对共同抓持物体的协同搬运,同时优化系统的整体运动速度;同时能够避免机器人的关节角、关节角速度超出界限;不需要考虑高阶矩阵的实时求逆问题(由于物理上存在结构闭链,传统基于雅克比求逆方法中,雅克比矩阵为多个机器人雅克比矩阵的级联形式,若直接求逆,所需计算量非常大),无需对该矩阵进行求逆运算,将大大减少运算的复杂度,可以减低机器人的硬件要求,降低成本。
本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储介质中,存储介质可以包括:只读存储器(ROM,Read Only Memory)、随机存取存储器(RAM,RandomAccess Memory)、磁盘或光盘等。
另外,以上对本发明实施例所提供的一种多机器人协同搬运控制方法及装置进行了详细介绍,本文中应采用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
- 一种多机器人协同搬运控制方法及装置
- 一种多机器人局域网内的多机器人协同控制方法及装置