一种基于AR辅助的汽车工件装配图像识别方法及系统
文献发布时间:2023-06-19 12:24:27
技术领域
本发明涉及汽车零件装配技术领域,具体是一种基于AR辅助的汽车工件装配图像识别方法及系统。
背景技术
汽车在生产时需要将一个部件的多种零件拿出来进行单独组装,最后将组装好的多个部件再次进行整体组装,从而完成一辆汽车的组装,在组装部件前,由于零件较多需要使用合适的图像识别方法来识别每一个零件的尺寸、颜色和安装注意事项等,以减少或避免后期的实物安装失误。
但是,现有的图像识别方法没有AR辅助功能,识别起来不够精确,且现有的图像识别方法识别工件后的工件信息不够详细,无法较大程度的减少使用者的实际操作失误。因此,本领域技术人员提供了一种基于AR辅助的汽车工件装配图像识别方法及系统,以解决上述背景技术中提出的问题。
发明内容
本发明的目的在于提供一种基于AR辅助的汽车工件装配图像识别方法及系统,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
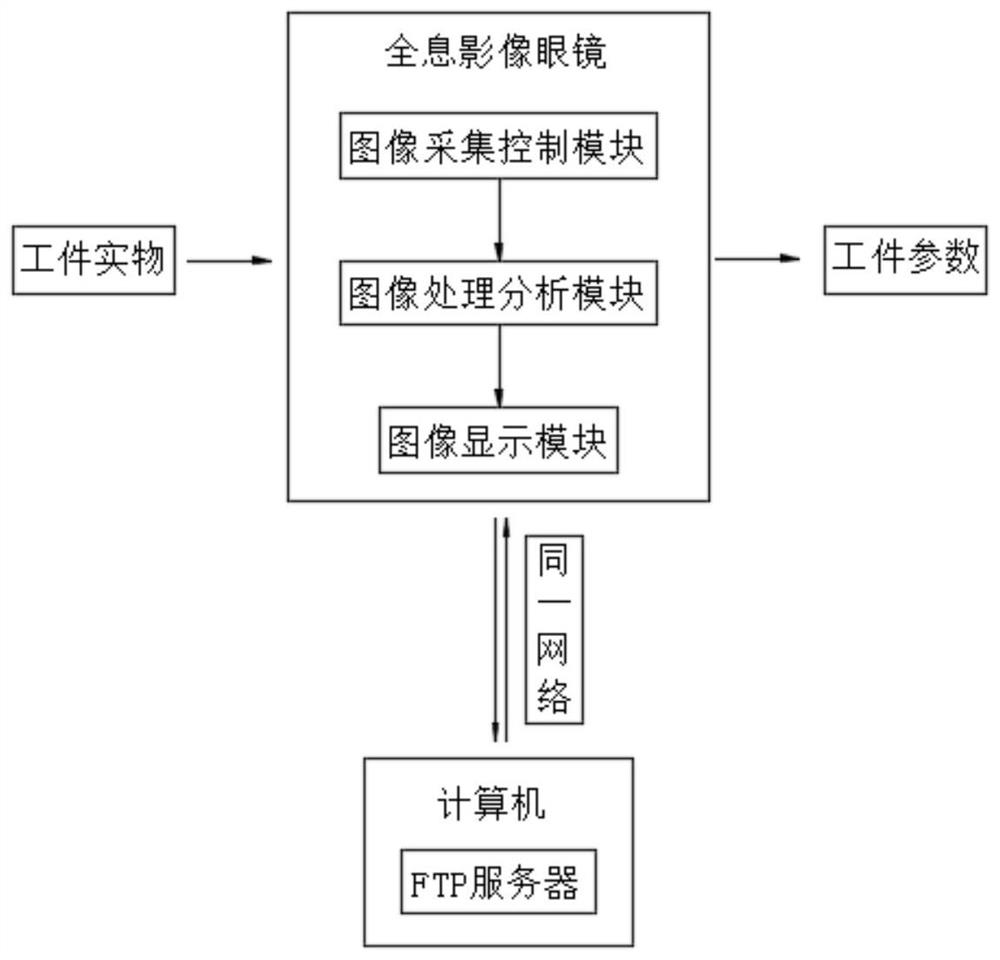
一种基于AR辅助的汽车工件装配图像识别系统,包括全息影像眼镜和计算机,所述全息影像眼镜内部安装有图像采集控制模块、图像处理分析模块和图像显示模块,所述计算机内部安装有FTP服务器。
作为本发明再进一步的方案:所述全息影像眼镜和计算机在同一网络环境下,该网络环境为互联网或者局域网,所述全息影像眼镜配套有全息鼠标,所述计算机安装有NET框架。
作为本发明再进一步的方案:所述图像采集控制模块和图像显示模块均与图像处理分析模块电性连接。
作为本发明再进一步的方案:所述图像采集控制模块通过全息影像眼镜上的光学透镜来选中工件实物,所述图像采集控制模块内部安装有A/D转换芯片,用于将模拟信号转换为和数字信号。
一种基于AR辅助的汽车工件装配图像识别方法,包括以下步骤:
S1、使用者打开计算机和全息影像眼镜并将计算机和全息影像眼镜连接在同一个网络环境下,该网络环境为互联网或局域网均可,接着在计算机中安装好NET框架和FTP服务器;
S2、使用者将全息影像眼镜戴在头部,将全息鼠标戴在食指处,通过上下滑动拇指进行操作;
S3、全息影像眼镜的界面上会显示定位模块、分装模块、工件模块和锁定模块这四个模块,使用者转动头部使光标落在工件模块选项上,上下滑动拇指即可选中工件模块,选中工件模块后全息影像眼镜的界面靠近中间处会出现一个方形窗口;
S4、使用者将工件实物拿在手上,转动头部使得全息影像眼镜中出现的方形窗口对准该工件实物,全息影像眼镜中的图像采集控制模块会扫描该工件实物并将该工件实物的形状、颜色等数据信息传送到全息影像眼镜中的图像处理分析模块中,图像处理分析模块会在计算机的FTP服务器中搜索该工件实物,搜索到后会通过图像显示模块将该工件实物的照片、编号、安装事项等显示在全息影像眼镜中,让使用者可以清楚地看到,从而完成图像识别;
S5、在操作过程中使用者可以使用者通过S3中方法选中锁定模块,点击后界面不会随着视野运动,防止部分操作时对视野的遮挡。
作为本发明再进一步的方案:所述S3中的定位模块包括图像定位、空间定位和姿态调整三个选项。
作为本发明再进一步的方案:所述S3中的分装模块包括模型加载选项。
与现有技术相比,本发明的有益效果是:
本发明通过设置的图像识别方法采用了计算机和全息影像眼镜,计算机和全息影像眼镜使用同一个网络,数据相通,识别精度高、范围广,通过计算机中的FTP服务器可以识别大量的汽车工件,通过全息影像眼镜识别工件后会显示工件信息,使用者可以很直观的看到汽车工件装配中的每一个工件的形状、尺寸和安装事项等,可以减少使用者实际安装时的失误,避免使用者思考良久,从而提高了工作效率。
附图说明
图1为一种基于AR辅助的汽车工件装配图像识别系统的示意图;
图2为一种基于AR辅助的汽车工件装配图像识别方法的示意图;
具体实施方式
请参阅图1,本发明实施例中,一种基于AR辅助的汽车工件装配图像识别系统,包括全息影像眼镜和计算机,全息影像眼镜内部安装有图像采集控制模块、图像处理分析模块和图像显示模块,计算机内部安装有FTP服务器,全息影像眼镜和计算机在同一网络环境下,该网络环境为互联网或者局域网,全息影像眼镜配套有全息鼠标,计算机安装有NET框架,图像采集控制模块和图像显示模块均与图像处理分析模块电性连接,图像采集控制模块通过全息影像眼镜上的光学透镜来选中工件实物,图像采集控制模块内部安装有A/D转换芯片,用于将模拟信号转换为和数字信号。
在图2中,
一种基于AR辅助的汽车工件装配图像识别方法,包括以下步骤:
S1、使用者打开计算机和全息影像眼镜并将计算机和全息影像眼镜连接在同一个网络环境下,该网络环境为互联网或局域网均可,接着在计算机中安装好NET框架和FTP服务器;
S2、使用者将全息影像眼镜戴在头部,将全息鼠标戴在食指处,通过上下滑动拇指进行操作;
S3、全息影像眼镜的界面上会显示定位模块、分装模块、工件模块和锁定模块这四个模块,使用者转动头部使光标落在工件模块选项上,上下滑动拇指即可选中工件模块,选中工件模块后全息影像眼镜的界面靠近中间处会出现一个方形窗口;
S4、使用者将工件实物拿在手上,转动头部使得全息影像眼镜中出现的方形窗口对准该工件实物,全息影像眼镜中的图像采集控制模块会扫描该工件实物并将该工件实物的形状、颜色等数据信息传送到全息影像眼镜中的图像处理分析模块中,图像处理分析模块会在计算机的FTP服务器中搜索该工件实物,搜索到后会通过图像显示模块将该工件实物的照片、编号、安装事项等显示在全息影像眼镜中,让使用者可以清楚地看到,从而完成图像识别;
S5、在操作过程中使用者可以使用者通过S3中方法选中锁定模块,点击后界面不会随着视野运动,防止部分操作时对视野的遮挡。
优先的,S3中的定位模块包括图像定位、空间定位和姿态调整三个选项。
优先的,S3中的分装模块包括模型加载选项。
为了更好地说明本发明的技术效果,通过下述试验进行阐述:
将汽车中的排气系统中的每一个工件按照该图像识别方法进行识别,排气系统由排气歧管衬垫、下进气歧管、EGR阀、EGR导管、左排气歧管、排气跨接管、右排气歧管和加热氧传感器组成,识别步骤如下:
步骤1、首先使用者先在计算机中安装好NET框架和FTP服务器,该FTP服务器中包含排气系统的文件数据,打开计算机和全息影像眼镜并将计算机和全息影像眼镜连接同一个无线局域网络;
步骤2、将全息鼠标戴在右手食指处,右手大拇指则上下滑动用于选定,戴上全息影像眼镜,此时画面中显示定位模块、分装模块、工件模块和锁定模块这四个选项,使用者转动头部使光标落在工件模块上,再上下滑动大拇指选定工件模块,此时画面中会出现一个方形框,类似于手机拍照时出现的人脸锁定框;
步骤3、任意拿一个工件,如EGR阀,转动头部或者用手移动该EGR阀使其位于步骤2中的方形框中,使用者再上下滑动大拇指选定该EGR阀,类似于手机拍照一样,该EGR阀就会锁定在这个方形框中,此时方形框中还会显示一个不断转动的圆圈,这是图像处理分析模块正在在FTP服务器中搜寻该EGR阀,搜寻完成后,在画面中就会显示该EGR阀,且该EGR阀旁边还有其具体的尺寸、颜色、安装位置和安装注意事项等,例如颜色:白色,安装位置:左侧下端靠近文字处与下进气歧管连接,远离文字的另一端与EGR导管连接,安装注意事项:安装时要使用生料带保持器密封性,安装后要进行密封性检测;至此完成该EGR阀的识别;
步骤4、使用者可以再任意拿一个工件进行识别,如排气跨接管,转动头部或者用手移动该排气跨接管使其位于步骤2中的方形框中,使用者再上下滑动大拇指选定该排气跨接管,类似于手机拍照一样,该排气跨接管就会锁定在这个方形框中,此时方形框中还会显示一个不断转动的圆圈,这是图像处理分析模块正在在FTP服务器中搜寻该排气跨接管,搜寻完成后,在画面中就会显示该排气跨接管,且该排气跨接管旁边还有其具体的尺寸、颜色、安装位置和安装注意事项等,例如形状:波纹长条中空管,颜色:黑色,安装位置:左端左排气歧管连接,右端与右排气歧管连接,安装注意事项:安装时要使用生料带保持器密封性,安装后要进行密封性检测;至此完成该排气跨接管的识别;
步骤5、使用者可以按照上述方法识别该排气系统中的任意一个工件。
以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种基于AR辅助的汽车工件装配图像识别方法及系统
- 一种基于AR增强现实的汽车制造装配辅助指导方法及系统