用于根据物理参数设定值对涡轮机的实时系统的物理参数进行调节的系统和方法
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及一种根据物理参数设定值对涡轮机的实时系统的物理参数进行调节的系统。例如,物理参数可以是涡轮喷气阀的位移速度、燃料流速、叶片的取向角等。
背景技术
已知地,调节系统REG包括校正器,该校正器包括校正函数C1(p)和参数化增益K。对调节系统的性能的评估主要体现在对其响应时间和稳定性的评估。在实践中,该调节系统被参数化以实现响应时间和稳定性之间的平衡。
在实践中,涡轮机的实时系统包括可随时间发生变化和可随时间发生性能下降的特性和变量(如磨损、偏移等)。因此,尤其是就稳定性而言,在调试时运行最佳的调节系统在几个月后可能不是最佳的。为了消除这个潜在的缺点,在调试过程中,该调节系统被参数化设置为具有很大的稳定性盈余,这会影响响应时间。
本发明旨在通过提供一种能够动态调试以便获得持久的良好稳定性和响应时间性能的调节系统,以至少部分消除上述缺点。
顺便提及,专利申请US2004/0123600公开了一种调节系统,其给出了随着时间的推移优化实时系统定义的启示,以便对随着时间的推移出现的缺陷和故障进行整合。这种实时系统的优化是复杂的(定义新的传递函数等)且不允许响应性调节。因此计算成本非常高。
专利US5537310还公开了一种自适应校正模型,其中,实时系统模型的参数化增益在瞬变阶段进行调试。该专利仅解决了瞬变的稳定性,而未解决敏捷性方面的缺陷。
发明内容
本发明涉及一种根据物理参数设定值对涡轮机的实时系统的物理参数进行调节的系统,该调节系统具有响应时间且包括:
校正器,其包括校正函数和参数化增益K,
实时系统的理论逆传递函数,和
用于在调节过程中优化参数化增益K的优化系统,该优化系统包括:
稳定性校正模块,其被配置为在调节物理参数的过程中检测到该调节系统的不稳定性时,确定具有正值的第一增益常数K1,
调节系统的响应时间校正模块,其被配置为在调节物理参数的过程中检测到延迟时,确定具有负值的第二增益常数K2,所述稳定性校正模块被配置为在调节物理参数的过程中检测到不稳定性时,抑制响应时间校正模块,和
确定模块,其被配置为确定与先前确定的第一增益常数K1和第二增益常数K2成函数关系的参数化增益K。
本发明的显著之处在于,该调节系统使得可以通过提高参数化增益来动态地校正稳定性缺陷以及通过降低参数化增益动态地校正延迟,使得该调节系统具有最佳性能。因此,该调节系统是自适应的。有利地,不再需要如现有技术中那样为了稳定性而牺牲响应时间。因此,该调节响应更加敏捷。有利地,在不稳定的情况下,对敏捷性的改进得到控制。换言之,稳定性优先被校正,而响应时间只有在该调节系统稳定时才被改进。借助于本发明的调节系统,该调节在抵消周期性现象中特别有效,周期性现象是具有旋转元件的涡轮机特有的,其随时间的变化影响对物理参数的调节。
因此,该调节系统可以根据自己的响应来进行自我校正。
优选地,在物理参数和物理参数设定值之间定一偏差。该稳定性校正模块包括稳定性检测模块,该稳定性检测模块被配置成将该偏差与高偏差阈值和低偏差阈值进行比较。该稳定性检测模块被配置成,如果该偏差持续性地大于高偏差阈值后低于低偏差阈值,则检测到不稳定性。换言之,该稳定性检测模块能够从预定范围内确保一待测偏差。这种检测是快速且稳健的。
优选地,由于偏差在不稳定性期间振荡,因此该稳定性检测模块被配置为在检测到不稳定性之后对振荡进行计数,并确定与计算的振荡次数NB-osc成函数关系的稳定性校正参数TopCS,并根据该稳定性校正参数TopCS确定第一增益常数K1。由此,通过计算振荡次数,可以确定不稳定性的程度,并能够据此推导出适当的校正度。
优选地,该稳定性校正模块被配置为,在检测到因物理参数设定值中的显著变化而产生瞬变时,将计算的NB-osc的振荡次数设置为零。
换言之,该稳定性检测模块专用于确保稳定阶段期间的稳定性,通过专用装置确保瞬变阶段的稳定性。通过允许根据不稳定性的类型来计算最佳校正值,以改善校正。
优选地,该稳定性检测模块被配置为,在根据第一增益常数K1确定参数化增益K之后,将计算的振荡次数设置为零。换言之,只要先前的校正尚未产生其效果,新校正就会被抑制。
根据本发明的一个方面,该稳定性校正模块包括过冲检测模块,该过冲检测模块被配置为确定过冲参数TopOS,第一增益常数K1由过冲参数TopOS确定。根据本发明,通过专用装置监测瞬变阶段的稳定性,此处为加速瞬变阶段,其与物理参数设定值的增长相对应,该专用装置确保了最佳校正。
优选地,偏差被限定在物理参数和物理参数设定值之间,该过冲检测模块被配置为,在参数设定值的显著增大变化之后启动偏差监测周期。该过冲检测模块被配置为将偏差与至少一个过冲阈值进行比较,且该过冲检测模块被配置为,如果偏差在监测周期大于过冲阈值,则检测到过冲。换言之,仅将先前验证的瞬变阶段的过冲或下冲纳入考量范围。在该过冲检测模块中有利地忽略稳定阶段期间的过冲或下冲。单独处理过冲有利地能够进行响应性校正,从而一旦第一过冲或下冲出现,则任何未来的过冲或下冲将被抑制。由于监测窗口很窄,因此所做的校正可更具相关性且响应更加敏捷。
优选地,该过冲检测模块被配置为,在检测到参数设定值中的减小变化的情况下,抑制过冲检测。换言之,如果增大瞬变条件不再满足,则监测周期停止。由此避免了任何错误的校正。
根据本发明的一个方面,该稳定性校正模块包括下冲检测模块,该下冲检测模块被配置为确定下冲参数TopOS,第一增益常数K1由下冲参数TopOS确定。有利地,区别性地处理加速瞬变和减速瞬变,由此实现针对不同类型的不稳定性的定制化调节。
优选地,该稳定性校正模块包括瞬变检测模块,该瞬变检测模块被配置为,根据物理参数的闭环响应yBF来测量偏差的变化ε。换言之,为了检测瞬变,需提前计算出理论闭环响应,以形成比较标准。这种动态比较标准对于确定监测时段并执行响应性校正是有利的。
优选地,该响应时间校正模块被配置为,确定物理参数设定值附近的公差范围,且当物理参数不在该公差范围内时,确定第二增益常数K2。由此,如果检测到过度延迟或超前,则进行动态校正。
本发明还涉及一种通过利用如前所述的调节系统REG来调节物理参数的方法,该调节方法包括:
在调节物理参数时监控稳定性,
在调节物理参数的过程中检测到不稳定性时,确定具有正值的第一增益常数K1,
在无不稳定性的情况下调节物理参数时,监控该调节系统REG的响应时间,
在调节物理参数的过程中检测到延迟时,确定具有负值的第二增益常数K2,
根据第一增益常数K1和第二增益常数K2确定校正器C(p)的参数化增益K,以在优化响应时间的同时确保调节的稳定性。
本发明还涉及一种计算机程序,该计算机程序包括用于执行如上所述的控制方法的步骤的指令,所述程序由计算机执行。
本发明还涉及一种用于涡轮机的电子控制单元,该电子控制单元包括存储器,所述存储器存储如前所述的计算机程序指令。
本发明还涉及一种包括如前所述的电子单元的涡轮机。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面对实施例描述中所需要使用的附图作简单地介绍,在附图中,相同的引用标记用以指示相似对象,其中:
图1是现有技术的通过逆模型校正实时系统的示意图;
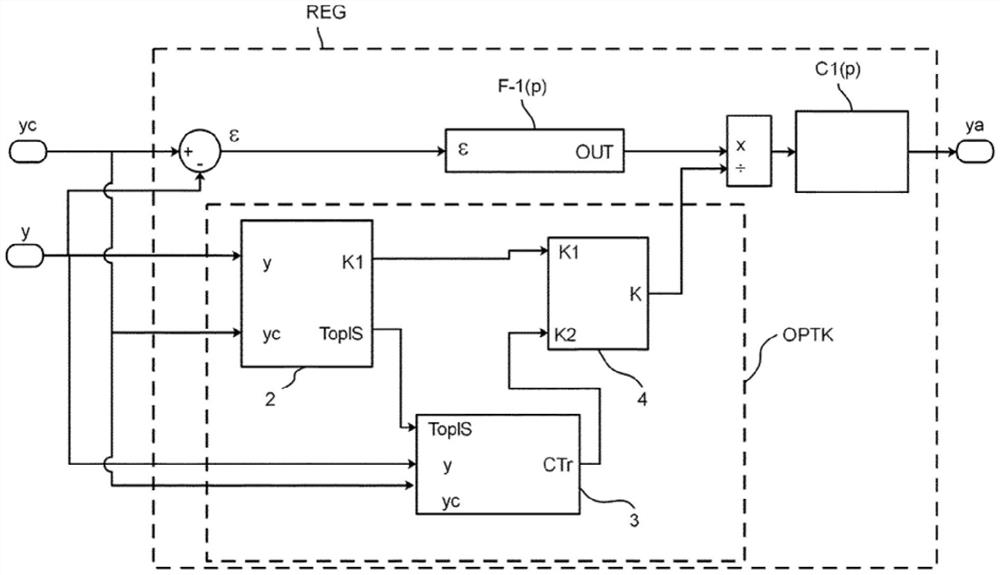
图2是本发明实施例的通过逆模型校正实时系统的调节系统的示意图;
图3是本发明实施例稳定性校正模块的示意图;
图4是本发明实施例不稳定性检测模块的示意图;
图5是本发明用于检测不稳定性的偏差ε的时间序列曲线;
图6是本发明实施例过冲检测模块的示意图;
图7是本发明在参数设定值的增大变化后,即增大瞬变阶段,物理参数的时间序列曲线;
图8表示的是本发明瞬变阶段物理参数和偏差的时间序列集,以确定过冲校正值;
图9是本发明实施例响应时间校正模块的示意图;
图10是本发明在稳定阶段中物理参数y相对于物理参数设定值yc的时间序列曲线;
图11表示的是在现有技术的调节系统中影响实时系统的周期性延迟后,物理参数的时间序列曲线集;
图12表示的是在发明的调节系统中影响实时系统的周期性延迟后,物理参数的时间序列曲线集。
应当注意,这些附图以详细方式阐述本发明以用于实施本发明,当然所述附图在必要的情况下能够用于更好地界定本发明。
具体实施方式
参考图1,其示出了被配置为确定与参数设定值yc成函数关系的控制参数y的校正系统SC。在本实施例中,校正系统SC执行逆模型校正器。换言之,校正系统SC依次包括校正器C(p)、逆模型F-1(p)以及实时系统F(p)。实时系统F(p)与作用于控制参数y的实时系统相对应。在实践中,实时系统F(p)执行若干传递函数。本质上,实时系统F(p)随时间推移发生变化(偏移、磨损等),并且不会完全相同地与参数设定值yc对应。
在实现逆模型校正器的校正系统SC中,假定实时系统F(p)是数学上可逆的,以定义逆模型F
已知地,校正器C(p)包括本领域技术人员已知的传递函数Ci(p)和调谐增益K,以便获得如下的公式:C(p)=(p)*1/K.
根据本发明,调谐增益K随时间推移进行调整,以便调整校正器C(p)的响应时间和稳定性。由此,如果在实时系统F(p)中发生纯延迟,或者实时系统F(p)的统计增益发生改变,则可以修改调谐增益K以保持最佳性能。
下文中,包括校正器C(p)和逆模型F
参考图2,校正器C(p)包括传递函数C1(p)和参数化增益K的优化系统OPTK。
优化系统OPTK包括用以确定第一增益分量K1的稳定性校正模块2,用以确定第二增益分量K2的响应时间校正模块3以及用于确定与先前确定的增益分量K1、K2成函数关系的参数化增益K的确定模块4。下文中,偏差ε被定义为等于物理参数设定值yc和物理参数y之差(ε=yc-y)。
现在将详细阐述不同的模块。
参考图2,稳定性校正模块2用以确定与控制参数y和参数设置点yc成函数关系的第一增益分量K1以及不稳定性TopIS。
稳定性校正模块2(图3)
图3示意性地示出了稳定性校正模块2,其包括不稳定性检测模块21,不稳定性检测模块21被配置为检测不稳定性TopIS并根据偏差ε和参数设定值yc来确定稳定性校正参数TopCS。在实践中,如下文阐述的,不稳定性检测模块21允许检测参数设定值yc附近的不稳定性。
稳定性校正模块2还包括过冲检测模块22,该过冲检测模块被配置为根据ε、控制参数y和参数设定值yc检测过冲TopOS。换言之,在参数设定值yc的快速增大变化期间,物理参数y能够过冲或下冲参数设定值yc并引起与瞬变阶段相关的不稳定性。在下文中,缩写“瞬变”也将用于指瞬变阶段。
相似地,稳定性校正模块2还包括下冲检测模块23,该下冲检测模块被配置成根据ε、控制参数y和参数设定值yc检测下冲TopUS。
稳定性校正模块2最后还包括稳定校正模块24,该稳定校正模块24被配置为确定第一增益分量K1,该第一增益分量K1与通过稳定性校正模块2的其他模块21、22、23得到的过冲检测参数TopOS、下冲检测参数TopUS和稳定性校正参数TopCS成函数关系。
稳定性检测模块21
图4示意性地示出了稳定性检测模块21。稳定性检测模块21包括第一模块211,其用于在ε值大于高阈值SH-CS或低于低阈值SB-CS的情况下,检测不稳定性TopIS。当高阈值SH-CS和低阈值SB-CS连续过冲或下冲时,检测不稳定性TopIS。
作为示例,第一模块211被配置为一方面将偏差ε与高阈值SH-CS进行比较,另一方面,将偏差ε与低阈值SB-CS进行比较。如果偏差ε大于高阈值SH-CS,则将过冲或下冲存储在存储器中。类似地,如果偏差ε低于高阈值SB-CS,则将过冲或下冲存储在存储器中。如果持续地检测到不同属性的两次过冲或下冲时,则会检测到不稳定性TopIS,如图5所示。在没有越出阈值SB-CS、SH-CS的情况下,则检测不到不稳定性TopIS。
如图4所示,稳定性检测模块21还包括第二模块212,用于在检测到不稳定性TopIS时计算物理参数y的振荡次数NB-osc。振荡次数NB-osc可以通过在稳定阶段计算连续过冲或下冲次数并将其存储在存储器中的方式来方便地获得。
第二模块212还被配置为接收归零重置命令,以将振荡次数NB-osc重置到零。为此,如图4所示,稳定性检测模块21包括第三模块213和第四模块214,用于确定归零重置RAZ。
如图4所示,稳定性检测模块21包括第五模块215,其被配置为根据振荡次数NB-osc确定校正参数TopCS。在该实施例中,如果振荡次数Nb-osc大于3,则执行校正,并由稳定性检测模块21发送校正参数TopCS。如图4所示,在校正期间,还会传送归零重置信息RAZ,以避免重复相同的校正。
再次参考图4,稳定性检测模块21包括第三模块213,用于检测瞬变,即参数设定值yc中的显著变化,并在检测到瞬变之后将振荡次数NB-ocs重置为零。为此,第三模块213监测偏差ε是否保持在第二高阈值SH2与第二低阈值SB2之间。优选地,第二高阈值SH2大于高阈值SH-CS,第二低阈值SB2小于先前使用的低阈值SB-CS,以便针对不稳定性TopIS检测保留空间。如果超过第二阈值SB2、SH2,则检测到瞬变的存在,其将振荡次数NB-osc重置为零,并停止稳定性校正。实际上,瞬变相关的校正由过冲检测模块22和下冲检测模块23来处理。
如图4所示,稳定性检测模块21包括第四定时模块214,该第四定时模块214被配置成检测是否已经执行校正,并在结果为是的情况下发出归零复位RAZ指令。换言之,当先前的校正尚未生效时,新校正则会被第四模块4抑制。在本实施例中,第四模块214采用定时的形式,其与实时系统F(p)的响应时间成函数关系。
有利地,稳定性检测模块21在检测到不稳定性TopIS后能够确定与振荡次数NB-osc成函数关系的校正参数TopCS。有利地,在瞬变或校正尚未被实时系统F(p)纳入考量的情况下,任何校正都会被抑制。正如稍后将阐述的,以这种方式计算的校正参数TopCS使得可以提高调节稳定性。
过冲检测模块22
图3示意性地示出了过冲检测模块22。如果待调节的物理参数y在瞬变结束时出现过冲,则允许确定上限校正值TopOS。换言之,过冲检测模块22使得能够在参数设定值yc中的增大变化之后立即进行校正。
在实践中,参考图6,过冲检测模块22包括用于在接收到物理参数设定值yc后确定实时系统F(p)在闭环Yb中的响应的模块221。这使得可以确定实时系统F(p)的理论理想响应。在本实施例中,确定模块221为“低通”类型,具体为一阶或二阶滤波器。
过冲检测模块22还包括瞬变检测模块222,即来自闭环响应yBF的偏差ε的变化,具体为其导数。以这种方式,该调节是否实际上处于增大瞬变阶段,即控制设定值yc中的增大变化是确定的。如果偏差ε偏离闭环响应yBF,则可以检测到加速TopAccel。图7中示意性地示出了瞬变输出时具有不稳定性的瞬变示例(阻尼缺陷)。
再次参考图6所示,过冲检测模块22还包括存储模块223,该存储模块223被配置为在检测到加速TopAccel时启动监测周期。由此,过冲检测模块22专注于在瞬变加速阶段检测不稳定性。实际上,当参数设定值yc是静态的时,过冲检测模块22不以检测物理参数y的过冲或下冲为目的,这与调节不稳定性相对应。
过冲检测模块22还包括用于监测相对于过冲阈值SD1,SD2的偏差ε的模块。在该实施例中,监测模块222包括两个过冲阈值SD1,SD2,在本实施例中为迟滞型阈值。
如图6所示,如果在监测时段期间检测到过冲阈值SD1,SD2的过冲,则由过冲检测模块22输出过冲校正值TopOS。
有利地,过冲检测模块22包括在检测稳定(模块225)或减速设定值(模块226)的情况下停止存储模块224的监测周期的模块。实际上,避免通过物理参数设定值yc的减速来检测到过冲是必要的。能够避免做出构成不稳定性源头的不合时的校正。
图8为过冲检测的一个示例。在本实施例中,在瞬变加速阶段之后,偏差ε过冲第一过冲阈值SD1,从而启动过冲校正TopCS,然后过冲第二过冲阈值SD2,从而再次启动过冲校正TopOS。换言之,校正是敏捷的,并且能够在瞬变结束出现过冲时立即校正调节。由于仅在存在瞬变的情况下执行,因此该校正是可能的。
下冲检测模块23
图3示意性地示出下冲检测模块23。由于与过冲检测模块22相似,下文将不对其做详细阐述,只是其目的为在参数设定值yc中的减小变化期间检测下冲,也就是物理参数设定值yc的减速。
与过冲检测模块22类似,如果检测到瞬变且检测到超过下限阈值,则从下冲检测模块23输出下冲校正值TopUS。
计算模块24
图3中示意性地示出了计算模块24,其具有根据校正值TopCS、TopOS和TopUS来确定第一校正分量K1的功能。
响应时间校正模块3(图9)
图9示意性地示出了响应时间校正模块3,其包括稳定性检测模块31,该稳定性检测模块31被配置为检测参数设定值yc是否确实处于稳定。在实践中,稳定性检测模块31检查参数设定值yc没有太多变化,即没有瞬变。稳定性检测模块31产生用于计算模块33的稳定性确认信号ConfS。
仍参考图9,响应时间校正模块3包括用于确定物理参数设定值yc附近的公差范围的模块32。在本实施例中,预先确定低模版GabBTR和高模板GabHTR,并据此导出限定在yc-GabBTR和yc+GabHTR之间的公差范围。公差范围与介于物理参数y与物理参数设定值yc之间的被容许的延迟相对应。优选地,在接收到物理参数设定值yc之后,根据闭环yBF中的实时系统F(p)的响应来确定模板GabBTR、GabHTR。由此,模板GabBTR、GabHTR被完美地确定下来,从而定义出参考公差范围。
响应时间校正模块3还包括计算模块33,该计算模块33被配置为,如果物理参数y未落入由确认信号ConfS确认的稳定阶段的公差范围,则确定第二增益常数K2。
在实践中,响应时间校正模块3可以监测物理参数y相对于物理参数设定值yc的任何延迟。例如,这样的延迟可与增大太多的参数化增益K相关,尤其是在检测不稳定性之后增大太多的参数化增益K有关。具有负值的第二增益常数K2使得可以改善响应时间。有利地,由此执行多点校正。
如图10所示,物理参数y偏离区域P31和P32中的监测范围,这反映了调节的延迟。响应时间校正模块3基于监测范围之外的偏离次数来确定第二增益常数K2。
用于确定参数化增益K的模块4(图2)
如图2所示,用于确定参数化增益K的模块4被配置为将由稳定行校正模块2确定的第一增益常数K1和由响应时间校正模块3确定的第二增益常数K2相加。优选地,还会加上静态增益常数以确定参数化增益K。实际上,参数化增益K被实时修改。
鉴于第一增益常数K1是正值,第二增益常数K2为负值,参数化增益K在调节期间被动态修改,以便随随着时间的推移适应变化并校正任何偏移。
具有调谐增益K的动态优化的调节方法的实施例
本发明的调节方法,该方法包括:在调节物理参数时监测稳定性;在调节物理参数y的过程中监测到不稳定性时,确定具有正值的第一增益常数K1;在无不稳定性的情况下调节物理参数时,监测响应时间;在调节物理参数的过程中检测到延迟时,确定具有负值的第二增益常数K2;根据第一增益常数K1和第二增益常数K2确定校正器C(p)的参数化增益K,以在优化响应时间的同时确保调节的稳定性的步骤。
作为示例,为了阐述本发明相对于现有技术的优点,图11示出了当对于静态参数化增益(下方曲线),实时系统F(p)经历周期性延迟RET(中间曲线)时,与物理参数设定值yc(上方曲线)成函数关系的物理参数y的时间序列。在本实施例中,延迟RET在0.2s和3s之间变动。
如图11所示,当延迟RET变得显著时,在稳定运行和瞬变期间都会出现物理参数y的显著不稳定性。而且,敏捷性不是最佳的。这种调节并不令人满意。
参考图12,当实时系统F(p)经历由根据本发明的调节系统REG优化的动态参数化增益(下方曲线)的周期性延迟RET(中间曲线)时,与物理参数设定值yc(上方曲线)成函数关系的物理参数y的时间序列。
如图12所示,当延迟RET变得显著时,出现物理参数y的不稳定性,该不稳定性通过参数化增益K的增大被积极地予以校正。该增大与稳定性校正模块2相关,该稳定校正模块2已经在检测到不稳定TopIS之后增大了第一增益常数K1。当延迟RET变小时,参数化增益K的既往增大对响应时间是不利的且会引入滞后。该滞后通过参数化增益K的减小积极地被校正。该减小与响应时间校正模块3相关,该响应时间校正模块3已经在检测到滞后之后增大了第二增益常数K2。
借助于本发明,随着时间推移,调节系统REG的稳定性和响应时间被动态且积极地予以校正。由于其自适应性,该调节系统的性能是最佳的。
- 用于根据物理参数设定值对涡轮机的实时系统的物理参数进行调节的系统和方法
- 用于制造承载装置的方法、承载装置、用于检测物理参数的系统和用于检测物理参数的方法