用于调节非推进式发电涡轮机的方法和系统
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及包括多个推进转子的飞行器推进领域,具体地涉及由非推进式发电涡轮机供电的多个推进转子。
背景技术
已知地,飞行器安装有混合推进系统,混合推进系统包括非推进式发电涡轮机、电池和多个电动转子。此类混合推进系统,使得可以最优方式运送货物和商品的同时减少噪音干扰和燃料消耗。
从涡轮机调节的角度看,使用混合推进系统的缺点在于涡轮机不再具有推进作用而是专用于产生电能。
已知地,所谓的“双体”或“自由涡轮”推进式涡轮机包括具有高压转速N1的高压轴以驱动压缩机,以及具有低压转速N2的低压轴以形成输出轴。已知地,低压轴与自由涡轮连接,该自由涡轮通过减速阶段机械地驱动包括多个叶片的推进转子,该多个叶片的总距可以调整。已知地,总距与所述推进转子的所有叶片共有的入射角相对应。
在现有技术的包括推进式涡轮机的飞行器中,已知的是,调节系统被配置成限制低压转速N2的变化以确保飞行器的可驾驶性,同时控制燃料的流速以及高压转速N1,以使涡轮机以最佳效率运行。
借助被称为“总距控制”的节流调节,飞行器的飞行员可以调整转子叶片的入射角并调整转子施加在低压轴上的机械扭矩。总距的调整进而引起推进式涡轮机的功率需求的变化。
因此,调节系统必须独立于由飞行员通过总距施加的功率需求来控制低压转速N2。为此,推进式涡轮机的调节系统可以作用于两个运行参数:一方面是喷射到燃烧室中的燃料的流速,另一方面是压缩机的高压转速N1,其决定了进入燃烧室的气流流速,且可以被看作是涡轮机对低压轴所提供功率的反映。
在实践中,如图1所示,其示出了用于调节推进式涡轮机T1的系统,该涡轮机T1的调节系统基于两个嵌套的控制环:低压转速N2的控制环和高压转速N1的控制环。
该调节系统在输入端接收转速设定值N2c,该转速设定值N2c与涡轮机T1的低压转速N2进行比较,以确定低压转速的差εN2。由积分比例型的低压校正器CN2根据低压转速的差εN2来确定初级高压参数N1pc。通过将初级高压参数N1pc增加至预设参数N1a的方式来确定高压转速设定值N1c。然后,将高压转速设定值N1c与涡轮机的高压转速N1进行比较,以确定高压转速的差εN1。由积分比例型的高压校正器CN1根据高压转速的差εN1来确定燃油量Qc。因此,涡轮机T1接收最佳燃油量QC,以限制低压转速N2的变化。
在调节中使用预设参数N1a是非常重要的,因为这样能够以预期的方式将总距XPC的调整纳入考量,此调整会导致涡轮机T1的功率需求的变化。在实践中,由计算模块20根据飞行器转子的叶片总距XPC的测量值来确定预设参数N1a。实际上,总距XPC是涡轮机T1的功率需求的高级指标,并且使得可以随着时间变化来实现最优且精确的调节。为了能够实现这种调节,涡轮机T1配备有总距测量装置XPC,以便能够确定预设参数N1a。计算模块20通常采用数学模型的形式,该数学模型被定义为与转子的物理特性、压力状况和空气温度(密度)成函数关系,并且通过反馈(特别是根据飞行测试)经验性地实现重置。
对于包括非推进式发电涡轮机的飞行器,涡轮机并不是与飞行器的转子机械连接,而是与多个推进转子电连接。因此,像现有技术中那样确定预设参数不再可能。
直接的解决方案是测量每个电动转子的总距,但鉴于每个转子必须配备有总距测量装置XPC,这样比较复杂且成本高昂。
再者,鉴于多转子结构的限制与单转子结构的限制不同,对每个电动转子的总距的测量是没有意义的。具体来说,在多转子结构中,可以调整每个转子的总距且独立地改变其转速,而这在单转子结构中是不可能的。
发明内容
本发明的目的在于提出一种适于多转子结构的新型调节系统,该系统能够利用单转子结构的调节系统的优点。
一种用于调节非推进式发电涡轮机的方法,所述非推进式发电涡轮机被配置为向飞行器的多个推进转子供电,每个推进转子通过至少一个供电总线与能量分配模块连接,所述涡轮机根据供电率通过所述能量分配模块向每个供电总线供电,所述涡轮机包括具有高压转速N1的高压轴和具有低压转速N2的低压轴,所述调节方法包括:
确定每个推进转子的功率需求;
确定与每个推进转子的功率需求成函数关系的每个供电总线的功率需求;
确定与供电率和每个供电总线的功率需求成函数关系的每个供电总线的基本功率需求;
根据供电总线的所有基本功率需求确定总功率需求;
根据所述总功率需求确定预设参数;
根据低压转速设定值、所述涡轮机的低压转速的测量值以及所述预设参数来确定高压转速设定值;以及
根据高压转速设定值和高压转速的测量值来确定所述涡轮机的燃油流速设定值。
借助本发明,有利地利用已知的用于调节推进式涡轮机的方法来调节非推进式发电涡轮机。基于推进转子的总功率需求影响的预设参数,可以实现快速、可靠且有意义的调节。由于电能不是由涡轮机供应的,将供电率纳入考量也是有意义的。因此,电能需求可以可靠的方式预估确定。
有利地,该涡轮机驱动至少一个发电机,优选地,驱动多个发电机以向能量分配模块供电。优选地,低压轴驱动至少一个发电机,优选地,驱动多个发电机。虽然与飞行器的推进转子没有任何机械连接,但是非推进式发电涡轮机的低压轴可以直接或通过机械减速阶段驱动多个发电机,该驱动的特征在于其标称驱动速度使得可以确保所述发电机的最佳运行。这种最佳驱动速度明显取决于发电转子构件的技术和拓扑。与驱动飞行器的推进转子的推进式涡轮机的情况相同,非推进式发电涡轮机的调节必须限制低压转速N2,并限制其波动相对于飞行器电推进系统消耗的电功率的变化。
优选地,该能量分配模块被配置为通过涡轮机和电池对每个供电总线供电。优选地,每个供电总线专门地由电池和涡轮机供电。供电率随着不同参数的变化而变化,例如,电池的充电状态。
优选地,推进转子的功率需求被确定为与所述推进转子的以下至少一项参数成函数关系:所述推进转子的推力、转速和螺距。换言之,借助预设参数,使得能够将推进转子的多种特性以及可以呈多样性的控制(总螺距、转速等的变化)纳入考量范围。优选地,推进转子的功率需求被确定为与所引述的若干参数,优选为所有参数成函数关系。
根据本发明的一个方面,至少两个推进转子通过同一供电总线与能量分配模块连接。从而使得可以共用供电总线。优选地,至少两个供电总线与同一推进转子电连接,以实现备用供电并由此提高安全性。
优选地,向至少两个推进转子供电的供电总线与预定分配率成函数关系,该方法包括根据预定的分配率、所述供电总线的供电率、连接到所述供电总线的每个推进转子的功率需求来确定所述供电总线的基本功率需求。
优选地,该预设参数根据在输入端接收总功率需求的数据库进行确定。由此,总功率需求按照现有技术中总距的方式与预设参数直接相关。该确定方式直接且快速。
本发明还涉及一种用于调节被非推进式发电涡轮机的系统,非推进式发电涡轮机的系统被配置为向飞行器的多个推进转子供电,每个推进转子通过至少一个供电总线与能量分配模块连接,所述涡轮机根据供电率经所述能量分配模块向每个供电总线供电,所述涡轮机包括具有高压转速N1的高压轴和具有低压转速N2的低压轴,所述调节系统包括:
功率确定模块,其被配置为确定每个推进转子的功率需求;
预测模块,其被配置为:
确定与每个推进转子的功率需求成函数关系的每个供电总线的功率需求,
确定与供电率和每个供电总线的功率需求成函数关系的每个供电总线的基本功率需求,
根据供电总线的所有基本功率需求确定总功率需求,
根据所述总功率需求确定预设参数,
调节模块,其被配置为:
根据低压转速设定值、所述涡轮机的低压转速的测量值以及所述预设参数来确定高压转速设定值;
根据高压转速设定值和高压转速测量值,来确定所述涡轮机的燃油流速设定值。
本发明还涉及一种非推进式发电涡轮机,其被配置为向飞行器的多个推进转子供电,该涡轮机包括具有高压转速N1的高压轴和具有低压转速N2的低压轴,该涡轮机包括如先所述的调节系统。
本发明还涉及一种飞行器,其包括多个推进转子、至少一个能量分配模块、将每个推进转子连接到能量分配模块的至少一个供电总线、如前所述的根据供电率通过所述能量分配模块向每个供电总线供电的涡轮机。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面对实施例描述中所需要使用的附图作简单地介绍,相同的引用标记指代相似的对象,其中:
图1是现有技术的用于调节推进式涡轮机的系统的示意图;
图2是本发明的用于调节向多个推进转子供电的非推进式发电涡轮机的系统的示意图;
图3是本发明调节系统的预测模块的示意图;
图4是本发明用于在同一供电总线上的若干个推进转子的预测模块的示意图。
应当注意,附图以详细的方式呈现了本发明,使得本发明能够得以实施,显然,如有必要,所述附图可以用来更好地定义本发明。
具体实施方式
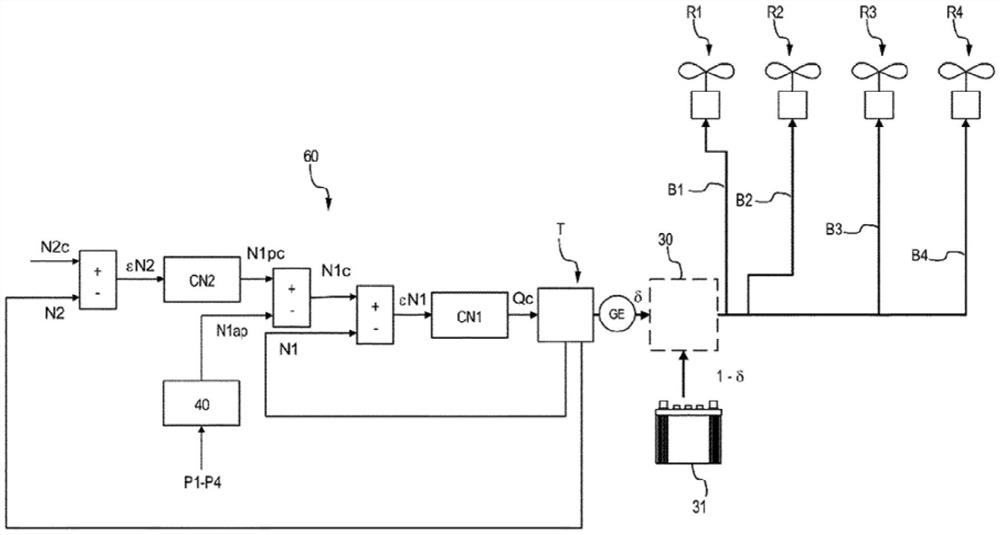
参考图2,其以示意性方式示出了飞行器(具体为直升机)的多转子结构。在本实施例中,该飞行器包括由分配模块30供电的多个推进转子R1-R4,该分配模块30本身则由非推进式发电涡轮机T和电池31供电。电池31不仅可表示单个电池31,也可表示一组电池31。在本实施例中,示出了4个推进转子R1-R4,但不言而喻,它们的数量可以有所不同。该飞行器包括飞行控制系统,用于控制推进转子R1-R4。
每个推进转子R1-R4通过一个或多个供电总线B1-B4与能量分配模块30连接。在图2所示的第一实施例中,每个推进转子R1-R4通过一个供电总线B1-B4与能量分配模块30连接。
分配模块30由涡轮机T驱动的多个发电机GE供电。每个供电总线B1-B4由涡轮机供电并与供电率δ1-δ4成函数关系。换言之,对于第一供电总线B1,供电率δ1与涡轮机T在第一供电总线B1中的供电份额对应。以对等的方式,供电率1-δ1与电池31在第一供电总线B1的供电份额对应。对于每个供电总线B1-B4,供电率δ1-δ4可以随时间和工作状况而有所变化。例如,当供电率δ1等于0时,仅电池31向第一供电总线B1供电。相反,当供给率δ1等于1时,仅涡轮机T向第一供电总线B1供电。此外,涡轮机T不仅可以向第一供电总线B1供电,而且也可以为电池31充电。换言之,涡轮机T可以产生比供电总线B1-B4需求量更多的能量以便为电池31反复充电。
再次参考图2,其示出了根据本发明实施例的用于调节非推进式发电涡轮机T的系统。已知地,涡轮机T包括具有高压转速N1的高压轴和具有低压转速N2的低压轴。
已知地,该涡轮机包括由高压轴驱动的压缩机。低压轴驱动多个电发电机GE以向分配模块30供电。
与现有技术类似,涡轮机T的调节系统包括基于两个嵌套控制环的调节模块60:低压转速N2的控制环和高压转速N1的控制环。
该调节模块60在输入端接收转速设定值N2c,将转速设定值N2c与涡轮机T的低压转速N2进行比较,以确定低压转速的差εN2。由积分比例型的低压校正器CN2根据低压转速的差εN2来确定初级高压转速N1pc。通过将初级高压参数N1pc增加至预设参数N1ap的方式来确定高压转速设定值N1c。然后,将高压转速设定值N1c与涡轮机的高压转速N1进行比较,以确定高压转速参数的差εN1。由积分比例型的高压校正器CN1根据高压转速的差εN1来确定燃油量Qc。有利地,预设参数N1ap被确定为使得涡轮机T接收最佳燃料量Q
根据本发明,预设参数N1ap是总功率需求Pglob的函数,总功率需求Pglob根据供电总线B1-B4的基本功率需求PB1e-PB4e来确定。如下文所述,基本功率是指由每个供电总线B1-B4从涡轮机T获取的功率。
根据本发明,该调节系统包括预测模块40,该预测模块40被配置为根据每个推进转子R1-R4的功率需求P1-P4来确定预设参数N1ap。
参考图3,每个推进转子R1-R4的功率需求P1-P4由功率确定模块50根据每个推进转子R1-R4的具体不同参数(具体为转速、螺距、大气条件、飞行器的速度等)来确定。优选地,功率确定模块50为与传感器连接的控制器,该传感器用于测量每个推进转子R1-R4的具体参数。
如图3所示,预测模块40包括第一子模块41,第一子模块41被配置为根据所述供电总线B1-B4的供电率δ1-δ4和所述推进转子R1-R4的功率需求P1-P4,按照如下公式来确定每个供电总线的PB1-PB4的基本功率需求PB1e-PB4e:
PBe=P*δ
基本功率需求PB1e-PB4e表示对每个推进转子R1-R4的电功率需求的影响。在本实施例中,供电总线PB1-PB4的基本功率需求PB1e-PB4e和与其连接的推进转子R1-R4的功率需求P1-P4相对应。
预测模块40被配置为根据所有基本功率需求PBe1-PBe4来确定总功率需求Pglob。在本实施例中,总功率需求Pglob是通过将所有基本功率需求PBe1-PBe4相加来获得的。
仍参考图3,预测模块40包括数据库42,该数据库42被配置为将总功率需求Pglob与预设参数N1ap相关联。优选地,数据库42是依据经验进行限定的或通过计算(数学模型、数学函数等)来进行限定。
将预设参数N1ap引入调节模块60,以取代现有技术中根据飞行器转子的总距定义的预设参数。有利地,为了调节涡轮机T,调节模块60对于单转子结构和多转子结构保持相同,仅对预设参数N1ap进行调整。由此,对调节系统的任何改进都将对所有结构有益。
由于预设参数N1ap与非推进式涡轮机T所要求的功率需求是相对应的,因此对该预设参数N1ap的限定是有利的。有利地,此参数与根据机械驱动飞行器转子的推进式涡轮机的总距计算得来的参数类似。
当飞行器在飞行时,飞行器的飞行控制系统控制不同的推进转子R1-R4,以使飞行器移位。推进转子R1-R4由涡轮机T和电池31供电,并与涡轮机T和电池31各自的供电率δ1-δ4成函数关系。功率确定模块50使得能够确定功率需求P1-P4。根据这些功率需求P1-P4,预测模块40可以确定影响涡轮机T的总功率需求Pglob,并据此推导出用于调节低压转速N2并限制低压转速N2变化的预设参数N1ap。涡轮机T以最优方式被使用,从而减少其燃油消耗。
在如图4所示的第二实施例中,每个推进转子R1-R4通过同一供电总线B1-B4与能量分配模块30连接。此外,同一个推进转子R1-R4可以与多个供电总线B1-B4连接,以实现备用,以便在发生故障时提高可靠性。
与先前的方式类似,功率确定模块50根据每个推进转子R1-R4的具体不同参数(具体为转速、螺距、大气条件、飞行器的速度等)来确定每个推进转子R1-R4的功率需求P1-P4。
此后,该示例描述了由两个转子R1、R2共用的单个供电总线B1。但是,不言而喻,其数目可以不同。
在本实施例中,供电总线B1以与预定分配率β11,β12成函数关系的方式向推进转子R1,R2供电。在本实施例中,参考图4,第一供电总线B1向第一推进转子R1提供功率β11*P1并向第二推进转子R2提供功率β12*P2。换言之,供电总线PB1的总功率被定义如下:
PB1=β11*P1+β12*P2
与先前的方式类似,涡轮机T以与供电率δ1-δ4成函数关系的方式通过驱动发动机GE直接向每个供电总线B1-B4供电。每个供电总线B1-B4的基本功率需求PB1e-PB4e被确定为与供电率δ1-δ4和总线PB1-PB4的功率需求成函数关系。
在本实施例中,参考图4,第一供电总线PB1的基本功率需求PB1e被定义如下:
PB1e=δ1*(β11*P1+β12*P2)
与先前的方式类似,总功率需求Pglob通过将基本功率需求PB1e-PB4e加在一起的方式推导得出,以确定预设参数N1ap。
换言之,本发明使得不仅能够在供电总线B1-B4被独立使用时,而且还能够在其被共用以实现备用时确定相关的预设参数N1ap。
借助本发明,通过部分使用现有技术中开发的推进式涡轮机的调节系统,实现以最佳方式调节非推进式涡轮机T。
- 用于调节非推进式发电涡轮机的方法和系统
- 可作为泵、压缩机、推进器、发动机或涡轮机用的非变容式旋转机构