一种排泥库土工布巡检航线的自动提取方法
文献发布时间:2023-06-19 13:49:36
技术领域
本申请涉工程检测技术领域,尤其涉及一种排泥库土工布巡检航线的自动提取方法。
背景技术
作为金属冶炼废弃物的堆存设施,排泥库是矿山企业堆存生产过程中产生的泥浆的主要场所,也是金属或非金属矿山的重大危险源。排泥库里面的泥浆含有多种重金属离子,一旦发生泄漏事故,泥浆可能会进入周边环境,给人民群众的生产和生活带来威胁,甚至还可能污染地下水,破坏生态环境。土工布是在排泥库表面覆盖的防渗材料,位于泥浆和排泥库之间,能够排除水分的同时阻止泥浆泄漏。土工布巡检是排泥库日常管理的重点内容,要定期开展土工布隐患排查工作,确定排查和防范的重点区域;结合排查情况,对土工布进行修补和加高,防范泥浆泄漏事故发生。
目前,一般采用人工方式进行土工布巡检,通过目视和拍照等方式记录巡检过程中发现的问题。人工巡检方式需要大量巡检人员,时间和人力资源成本居高不下。排泥库一般处于比较偏僻的位置,人工巡检需要划船,不仅艰苦,而且有较高的危险性。另外,人工巡检还存在时效性差、巡检信息不全和无法客观掌握巡检落实情况等问题。
为了克服人工巡检方式的不足,相关技术中,采用了无人机替代人工对排泥库土工布进行巡检,无人机搭载可见光相机能够清晰的拍摄排泥库影像,可以生成正射影像和实景三维模型。但是无人机巡检排泥库需要预先设定航线,目前是在卫星图像上人工绘制航线,费时费力;另外,由于遥感影像现势性差,会经常出现人工绘制的航线与土工布现状不吻合的情况。
发明内容
有鉴于此,本申请提供一种排泥库土工布巡检航线的自动提取方法,以解决无人机巡检排泥库土工布过程中的巡检航线规划难题,为土工布巡检提供精准的巡检航线。
为了实现上述目的,本申请提供的一种排泥库土工布巡检航线的自动提取方法,包括如下步骤:一种排泥库土工布巡检航线的自动提取方法,其特征在于,包括如下步骤:
步骤S1、获取排泥库的三维彩色点云;
步骤S2、根据颜色和高程特征从所述三维彩色点云中提取出土工布点云;
步骤S3、对所述土工布点云进行图像处理,得到土工布中心线的矢量曲线;
步骤S4、将所述矢量曲线的点坐标从图像坐标系转换为地理坐标系,转换后的坐标点序列结合高程特征,得到无人机巡检排泥库土工布的航线。
在一些可能的实施例中,在步骤S3中,图像处理的步骤包括:
步骤S31、将土工布点云转化为二值图像;
步骤S32、对所述二值图像进行形态学运算;
步骤S33、提取完成形态学运算后的二值图像的骨架;
步骤S34、删除所述骨架上的毛刺,获取土工布中心线;
步骤S35、简化所述土工布中心线,获得所述土工布中心线的矢量曲线。
在一些可能的实施例中,步骤S31包括:
步骤S311、计算土工布点云的平面四至点坐标;
步骤S312、设置图像网格尺寸,根据所述平面四至点坐标初始化二值图像;
步骤S313、遍历所有的土工布点云,计算其对应的图像坐标,得到土工布点云的二值图像。
在一些可能的实施例中,在步骤32中,所述形态学运算具体为:使用矩形卷积核,对所述二值图像先进行闭运算,再进行开运算。
在一些可能的实施例中,在步骤S33中,具体包括:
步骤S331、遍历所有图像像素,标记满足删除条件A的像素点,并将被标记的像素点删除;
步骤S332、遍历所有图像像素,标记满足删除条件B的像素点,并将被标记的像素点删除;
循环步骤S331和步骤S332,直至满足删除条件A和删除条件B的像素点被完全删除;
步骤S333、遍历所有图像像素,标记满足删除条件C的像素点,并将被标记的像素点删除;
以P1表示某一个像素点,P2、P3、P4、P5、P6、P7、P8、P9表示像素点P1的8个邻域像素点;A(P1)表示在P1的8个邻域像素点中,像素值为1的像素点个数;B(P1)表示以P2~P3,P3~P4,P4~P5,P5~P6,P6~P7,P7~P8,P8~P9,P9~P2为序时,8个邻域像素点的像素值出现0~1变化的累计次数;
删除条件A为:P1=1,且同时满足
删除条件B为:P1=1,且同时满足
删除条件C为:P1=1,且满足
所述并将被标记的像素点删除,具体指将被标记的像素点的像素值从1变为0。
在一些可能的实施例中,步骤S34包括:
步骤S341、探测出骨架里面的端点和交叉点,计算端点的数量和交叉点的数量,若端点的数量大于2或交叉点的数量大于0,依次执行步骤S342和S343,否则结束步骤S34;
步骤S342、执行计算过程:
遍历所有“端点”-“端点”的线段,记录线段的坐标序列,并计算该线段对应的长度;
遍历所有“端点”-“交叉点”的线段,记录线段的坐标序列,并计算该线段对应的长度。
步骤S343、执行删除过程:
对所有“端点”-“端点”的线段,保留线段长度值最大的线段,并删除其他线段;
对所有“端点”-“交叉点”的线段,当一个交叉点对应至少2个端点时,删除该交叉点对应的线段长度值最小的线段,并保留其他线段。
在一些可能的实施例中,在步骤S35中,采用道格拉斯-普克算法对删除毛刺后的骨架的中心线进行简化,抽稀阈值取值范围为[0.5m,2m]。
本申请能够有效解决目前巡检航线人工绘制速度慢和质量不稳定的问题,能有效改变矿山排泥库人工巡检安全风险高、耗时耗力、时效性差和巡检结果不准确的现状,为实现排泥库无人机自动化巡检提供技术支撑。
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对发明作进一步详细的说明。
附图说明
为了更清楚地说明本申请实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本申请的某些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
图1为本申请实施例完成步骤S2后获得的土工布点云;
图2为本申请实施例完成步骤S31后获得的二值图像;
图3为本申请实施例完成步骤S33后获得的二值图像的骨架;
图4为图3中骨架的局部放大图;其中,实心点表示端点,空心点表示交叉点
图5为本申请实施例完成步骤S34后获得的去掉毛刺的二值图像的骨架;
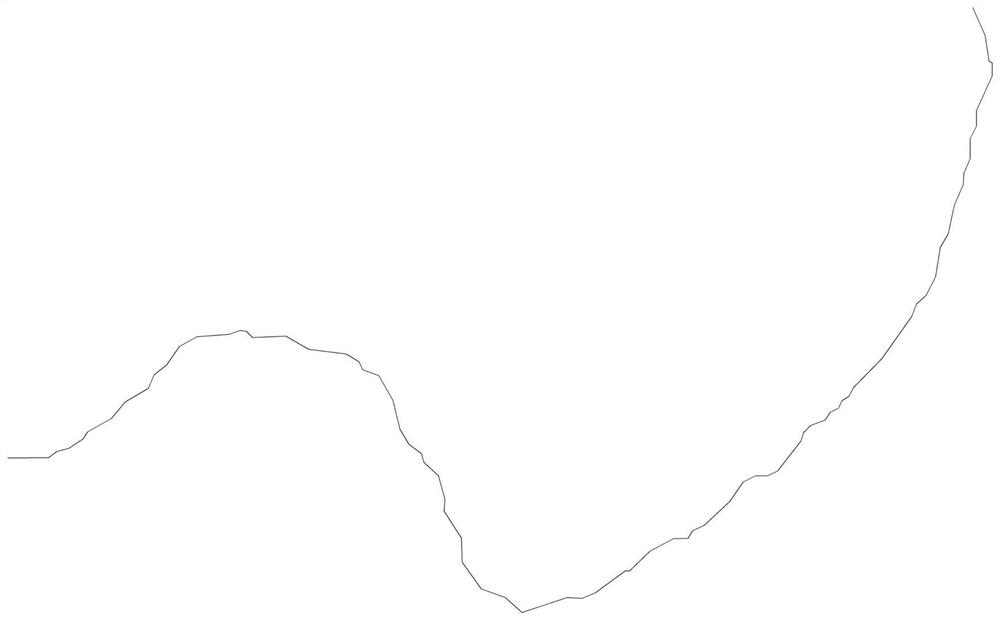
图6位本申请实施例完成步骤S35后获得的土工布中心线的矢量曲线;
图7为本申请实施步骤S33中,像素点P1及其8个邻域像素点的位置关系示意图;
图8为图7中,P1=P2=P3=P8=1,其余邻域像素点的像素值为0的情况示意图。
具体实施方式
为使本申请的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,应当理解,本申请中附图仅起到说明和描述的目的,并不用于限定本申请的保护范围。
本申请实施例提供的一种排泥库土工布巡检航线的自动提取方法中,包括如下步骤:
步骤S1、获取排泥库的三维彩色点云;
步骤S2、根据颜色和高程特征从所述三维彩色点云中提取出土工布点云;
步骤S3、对所述土工布点云进行图像处理,得到土工布中心线的矢量曲线;
步骤S4、将所述矢量曲线的点坐标从图像坐标系转换为地理坐标系,转换后的坐标点序列结合高程特征,得到无人机巡检排泥库土工布的航线。
无人机巡检排泥库土工布的难点在于:(1)无人机的巡检航线需要人工划定,排泥库范围比较大,人工划航线非常耗时。而且现在一般是根据Google影像进行划航线,排泥库一般在山区地带,山区的谷歌卫星图像更新不及时,划的航线跟实际情况出入很大,导致无人机巡检时无法拍摄到土工布。(2)无人机的续航时间有限,如果划的航线转折点过多,会降低无人机的工作效率,增加巡检时间。(3)无人机巡检有一定的风险。排泥库周边都是山体,如果巡检航线划定的不准确,无人机有撞机的风险。而本申请实施例所提出的排泥库土工布巡检航线的自动提取方法能够自动、高效地提取出精准的巡检航线,克服前述难题。
接下来,将对本申请实施例展开更详细的介绍。土工布沿排泥库的水岸线设置,通过无人机倾斜摄影可以获取到排泥库的三维彩色点云。三维彩色点云的每一个点都有X,Y,Z,R,G,B属性信息,其中X、Y、Z为点云的空间坐标,R、G、B分别表示点云的颜色信息,分别表示红、绿、蓝。因此,根据颜色和高程特征就可以从排泥库的三维彩色点云中提取出土工布点云,如图1所示。
在提取出土工布点云后,进入步骤S3:
步骤S31、将土工布点云转化为二值图像,具体为:
步骤S311、计算土工布点云的平面四至点坐标,分别是左上点(x
步骤S312、设置图像网格尺寸,网格边长pixelSize取值范围为[0.05m,0.5m];然后初始化二值图像,图像所有像素点的像素值设为0,
图像高
步骤S313、遍历所有的土工布点云,计算其对应的图像坐标,将土工布点(X,Y,Z)对应的像素点(pixelX,pixelY)的像素值设为1,
其中
为了减少使步骤S31获取的二值图像的噪声,步骤S32对二值图像进行形态学运算。形态学运算方式为先闭运算、然后进行开运算,使用的卷积核选择矩形(Rect),卷积核的尺寸为(5,5)。闭运算是先膨胀再腐蚀,开运算是先腐蚀再膨胀;腐蚀可以使目标区域范围“变小”,其实质造成图像的边界收缩,可以用来消除小且无意义的目标物;膨胀会使目标区域范围“变大”,将于目标区域接触的背景点合并到该目标物中,使目标边界向外部扩张。作用就是可以用来填补目标区域中某些空洞以及消除包含在目标区域中的小颗粒噪声。
无人机航线的线路是矢量数据,比如shp或者XML等格式文件,里面存储的是一个个坐标点,因此需要通过骨架提取获取土工布的中心线。所以,接下来是步骤S33、提取完成形态学运算后的二值图像的骨架,具体为:
步骤S331、遍历所有图像像素,标记满足删除条件A的像素点,并将被标记的像素点删除;
步骤S332、遍历所有图像像素,标记满足删除条件B的像素点,并将被标记的像素点删除;
循环步骤S331和步骤S332,直至满足删除条件A和删除条件B的像素点被完全删除;具体地,直到两个循环步骤中都没有像素被标记为删除为止;
此时图像已经得到细化,但是如图8所示,P1=P2=P3=P8=1,其余邻域像素点的像素值为0时,P1会被保留;为了进一步细化图像,本申请实施例还设计了步骤S333;
步骤S333、遍历所有图像像素,标记满足删除条件C的像素点,并将被标记的像素点删除;
以P1表示某一个像素点,P2、P3、P4、P5、P6、P7、P8、P9表示像素点P1的8个邻域像素点;A(P1)表示在P1的8个邻域像素点中,像素值为1的像素点个数;B(P1)表示以P2~P3,P3~P4,P4~P5,P5~P6,P6~P7,P7~P8,P8~P9,P9~P2为序时(如图7所示),8个邻域像素点的像素值出现0~1变化的累计次数;
删除条件A为:P1=1,且同时满足
删除条件B为:P1=1,且同时满足
删除条件C为:P1=1,且满足
所述并将被标记的像素点删除,具体指将被标记的像素点的像素值从1变为0;完成步骤S33后,获得的二值图像的骨架如图3所示。
但是如图4所示,由于土工布有一定的宽度,而且不并不像道路那样边缘很光滑,此时的骨架上还有许多毛刺,这些毛刺会影响所提取的土工布巡检航线的精准度。因此,本申请实施例还提供了删除骨架上的毛刺的方法,如步骤S34所示:
步骤S341、探测出骨架里面的端点和交叉点,计算端点的数量和交叉点的数量,若端点的数量大于2或交叉点的数量大于0,依次执行步骤S342和S343,否则结束步骤S34;
步骤S342、执行计算过程:
遍历所有“端点”-“端点”的线段,记录线段的坐标序列Line
遍历所有“端点”-“交叉点”的线段,记录线段的坐标序列Seg
步骤S343、执行删除过程:
对所有“端点”-“端点”的线段,保留线段长度值lenLine最大的线段Line,并删除其他线段;
对所有“端点”-“交叉点”的线段,当一个交叉点对应至少2个端点时,删除该交叉点node对应的线段长度值lenSeg最小的线段Seg,并保留其他线段。删除毛刺后的二值图像的骨架如图5所示,显然,相比图3和图4中的骨架更简洁、更平滑。
接下来,采用道格拉斯-普克算法(Douglas–Peucker algorithm)对删除毛刺后的骨架的中心线进行简化,抽稀阈值的取值范围为[0.5m,2m]。道格拉斯-普克算法(Douglas–Peucker algorithm)基本思路是:将待处理曲线的首末点虚连一条直线,求所有中间点与直线的距离,并找出最大距离值dmax,用dmax与抽稀阈值threshold相比较:若dmax 最后是步骤S4、将所述矢量曲线的点坐标从图像坐标系转换为地理坐标系,转换后的坐标点序列结合高程特征,得到无人机巡检排泥库土工布的航线,如图6所示。 本申请实施例的所有步骤均可以通过计算机程序实现自动化处理,能够有效解决目前巡检航线人工绘制速度慢和质量不稳定的问题,能有效改变矿山排泥库人工巡检安全风险高、耗时耗力、时效性差和巡检结果不准确的现状,为实现排泥库无人机自动化巡检提供技术支撑。 在本说明书中描述的“本申请”意味着在本申请的一个或多个实施例中包括结合该实施例描述的特定特征、结构或特点。由此,在本说明书的不同之处出现的语句“本申请”不是必然都参考相同的实施例,而意味着“一个或多个但不是所有的实施例”,除非是以其他方式另外特别强调。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。 以上所描述的实施例仅仅是本申请的一部分实施例,而不是全部的实施例。通常在附图中描述和示出的本申请实施例的组件可以以各种不同的配置来布置和设计。因此,在附图中提供的本申请的实施例的详细描述并非旨在限制本申请的保护范围,而仅仅是表示本申请的选定实施例。因此,本申请的保护范围应以权利要求的保护范围为准。此外,基于本申请的实施例,本领域技术人员在没有做出创造性劳动的前提下可获得的所有其它实施例,都应属于本申请保护的范围。
- 一种排泥库土工布巡检航线的自动提取方法
- 一种消除排泥库闭库安全隐患的方法