一种多功能散养鸡养殖机器人
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及机器人技术领域,具体为一种多功能散养鸡养殖机器人。
背景技术
近年来,国家农业部颁布《数字农业农村发展规划》等政策,大力推动传统农业转型,推进数字农场的建成,实现畜禽养殖环境改善和精准饲喂。随着人们生活水平的提高、产品质量安全意识的提升,绿色安全的蛋肉产品也越来越受到消费者的青睐。较传统养殖鸡相比,散养鸡肉质鲜美、营养价值更高,因此需求量大增,生态养殖散养鸡具有广阔的发展前景。但目前散养鸡养殖场设施简陋、养殖水平低。散养鸡下蛋地点具有随机性,人工收蛋效率低,无法保证所有鸡蛋被收取,长时间未发现后易导致鸡蛋变质;散养鸡养殖主要在荒山草坡、果园山林等地区,人工喂料劳动强度大;地形崎岖一般机器无法运行,消耗能源较大;养殖环境难以有效清理,易滋生传染病等问题亟待解决。
为解决上述问题,本发明提出一种多功能散养鸡养殖机器人,通过设置夹持机构和储蛋机构,能够及时、精确识别鸡蛋位置,对鸡蛋进行稳定夹持并储存,可以在滑轨上配备两组或多组夹持机构,提高收蛋效率;通过设置喂料机构,实现饲料自动抛洒,减低人工劳动强度;通过设置行走机构,利用翻转电机、辊轮、履带等结构有效适应多变复杂地形;通过设置消毒机构,将水箱分为第一腔室和第二腔室,配合对应的消毒喷头对养殖环境进行消毒清理;通过设置太阳能板能装置减少能量消耗,践行低碳环保、绿色农业的技术理念;通过设置不同性能的摄像头实现机器人对周边环境的视觉识别与监测。
发明内容
本发明提供了一种多功能散养鸡养殖机器人,以解决上述背景技术中提出的收蛋效率低、人工喂料劳动强度大、机器难以在崎岖地形运动,能源消耗大、养殖环境难以有效消毒等问题。
为实现上述目的,本发明供如下技术方案:一种多功能散养鸡养殖机器人,所述机器人包括夹持机构、储蛋机构、喂料机构、行走机构、消毒机构、太阳能板、第二摄像头、滑轨、蓄电池组、横架、第三摄像头、导轨、支架和底架,所述底架顶端安装有支架,所述支架顶端固定连接横架,支架内侧固定安装有滑轨,所述滑轨上安装有两组夹持机构,所述储蛋机构安装于底架顶端,所述消毒机构安装于支架外侧和底架顶端,所述行走机构安装于底架四角位置处;
所述夹持机构包括导向杆、第一电机、调节丝杠、驱动轮、导轮、定位板、定位座、承接板、第一步进电机、第一摄像头、固定平台、第二电机、旋转杆、固定环、连接杆、活动杆、活动盘和夹爪,所述定位板一侧转动安装四个导轮,另一侧固定连接定位座,定位板边部安装有第一电机,三个所述螺纹套管固定镶嵌在定位座内部,四个所述导轮呈矩形阵列分布,且上下位置处的导轮分别滑动连接于滑轨上下端,所述驱动轮与第一电机的输出轴一端固定连接,且驱动轮通过传动带与其中一个导轮传动连接,所述固定平台一端连接第一步进电机,另一端固定连接固定环,所述调节丝杠一端固定连接第一步进电机的输出轴,且调节丝杠外侧与定位座中部的螺纹套管螺纹连接,所述导向杆固定连接固定平台顶端且位于第一步进电机两侧,导向杆顶端活动贯穿位于定位座内部两侧的螺纹套管,所述固定环一端安装第二电机,固定环边部转动连接呈阵列分布的三个连接杆,所述连接杆底端转动连接夹爪,所述第二电机的输出轴一端固定连接旋转杆,所述活动杆一端转动连接旋转杆,另一端活动贯穿固定环并转动连接活动盘,所述活动盘边部分别与各个夹爪铰接,所述承接板与固定平台边部固定连接,承接板底端安装有第一摄像头。
优选的,所述固定环内直径大于活动杆宽度。
优选的,所述储蛋机构包括推动气缸、推板、托板、蛋托、升降机和摆放台,所述升降机一端安装于底架顶端,另一端连接托板底端,所述托板顶端放置有蛋托,所述支架侧面固定连接摆放台,所述摆放台内侧一端开设有固定孔,所述托板能够活动穿过固定孔,所述推动气缸固定安装于摆放台一端中部,推动气缸活塞一端固定连接推板,且推板位于摆放台内侧面。
优选的,所述喂料机构包括移动模块、料斗、料斗架、抛料刀片、撒料盘、阀门、第一锥形齿轮、第二锥形齿轮、第三锥形齿轮、活动轴、传动轴、第四锥形齿轮和驱动电机,所述料斗架顶部支架顶端安装有两个料斗,两个所述料斗的出料口处设有阀门,两个所述撒料盘分别位于两个料斗下方,所述撒料盘一端均匀安装有抛料刀片,另一端中部固定连接活动轴,所述活动轴外侧固定套设有第二锥形齿轮,所述旋转底座一端与料斗架底部支架顶端固定连接,另一端与活动轴固定连接,两个所述撒料盘之间设有传动轴,所述传动轴两端对称安装有第三锥形齿轮,且传动轴中部固定套设有第四锥形齿轮,两个所述第三锥形齿轮分别与两个第二锥形齿轮啮合连接,所述第一锥形齿轮与第四锥形齿轮外侧啮合连接,且第一锥形齿轮一端中部与驱动电机的输出轴固定连接。
优选的,所述抛料刀片截面呈U形结构。
优选的,所述移动模块包括第一滑轮、第二滑轮、滑轮盘、第二步进电机和移动杆,所述摆放台底端两侧安装有导轨,两组所述移动模块安装于导轨和喂料机构之间,所述移动杆一端固定连接料斗架顶部支架顶端,另一端固定连接滑轮盘,所述滑轮盘顶端转动安装四个第二滑轮,且四个第二滑轮呈矩形阵列排布,所述第二步进电机固定安装于滑轮盘下表面,所述第一滑轮与第二步进电机的输出轴固定连接,第一滑轮通过传动带与其中一个第二滑轮传动连接,所述两列第二滑轮内侧均与导轨滑动连接。
优选的,所述行走机构包括外壳体、辊轮、翻转电机、主动齿轮、轴架、链轮、从动齿轮、履带和第三电机,所述底架四角位置处均固定安装有翻转电机,所述主动齿轮与翻转电机输出轴一端固定连接,主动齿轮外侧与从动齿轮啮合连接,所述底架对应从动齿轮位置处均固定安装有轴架,所述驱动轴与从动齿轮中部固定连接,且驱动轴一端活动贯穿轴架并连接行走机构,所述从动齿轮通过驱动轴与外壳体固定连接,所述外壳体一侧两端均安装有链轮,另一侧固定安装有第三电机,所述第三电机输出轴一端与其中一个链轮固定连接,所述链轮外侧啮合连接履带,且履带活动套设在外壳体外侧,所述履带外侧均匀安装有辊轮。
优选的,所述消毒机构包括消毒喷头、水箱和水泵,所述支架顶端和底端安装有两组消毒喷头,所述底架顶端安装有水箱,且水箱分为第一腔室和第二腔室,所述水箱顶端两侧对应第一腔室和第二腔室位置均安装有水泵,且水泵通过水管与水箱连通,两个所述水泵通过水管分别与两组所述消毒喷头连通。
优选的,所述横架顶端安装有太阳能板,所述底架顶端安装有蓄电池组,且蓄电池组与太阳能板电性连接。
优选的,所述支架外侧安装有第二摄像头,所述横架上方四角位置处分别安装有第三摄像头。
本发明的有益效果是:1.通过设置夹持机构和储蛋机构,能够对鸡蛋进行夹持、输送和存储,夹持机构设置有三个柔性夹爪,呈三角夹爪形式能够对鸡蛋进行稳定的夹持,保证鸡蛋完整、不会破碎,且夹爪旁边配备有第一摄像头,能够精确识别鸡蛋,夹持机构能够延滑轨方向进行运动,便于将拾取到的鸡蛋放入蛋托中,可以在滑轨上配备两组或多组夹持机构,且各机构之间互不干扰,提高取蛋效率,该装置通过机器化的方式,代替人为收蛋的步骤,提高工作效率,同时储蛋机构能够实现蛋托在水平和竖直方向上的移动,方便鸡蛋的储存。2.通过设置喂料机构,控制料斗从出料口下料,饲料落到撒料盘上,通过驱动电机等相应的锥形齿轮、活动轴、传动轴等传动结构带动撒料盘转动,配合抛料刀片的作用,能够实现饲料的抛洒和喂料,有效降低工人劳动强度,同时设置移动模块,通过滑轮、传动带、第二步进电机等结构的配合实现喂料机构的移动,可调节撒料范围,能更加精确、方便的进行撒料工作。3.通过设置行走机构,在履带外侧均匀分布辊轮,能够实现全向运动,适应多种地形,同时通过设置翻转电机、主动齿轮和从动齿轮等结构,能够带动行走机构绕一端翻转三百六十度,从而能够穿越更为复杂的地形,提高机器的适用性。4.通过设置太阳能板,能够合理利用自然资源,使太阳能板接收太阳能并转换为电能被储存,在一定程度上降低能源的损耗。5.通过设置消毒机构,将水箱分为两个腔室储存消毒剂、杀虫剂等,并通过水泵分别连接与腔室相对应消毒喷头,在行进过程中对空气进行消毒和湿润,对害虫进行防治,防止传染病滋生,提高装置的功能性。
附图说明
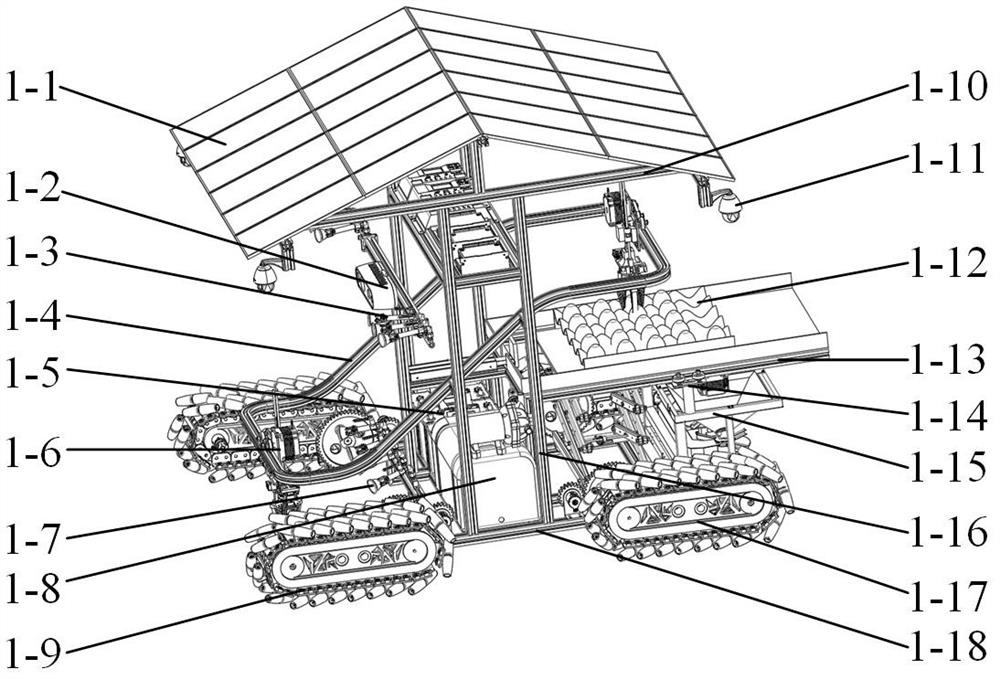
图1为本发明的结构示意图。
图2为本发明中夹持机构的结构示意图。
图3为本发明中夹爪安装示意图。
图4为本发明中储蛋机构的结构示意图。
图5为本发明中喂料机构的结构示意图。
图6为本发明中第一锥形齿轮安装示意图。
图7为本发明中驱动电机安装示意图。
图8为本发明中行走机构的结构示意图。
图9为本发明中水箱的剖面示意图。
具体实施方式
具体实施方式一:结合图1、图2和图3,本实施方式所述的一种多功能散养鸡养殖机器人,所述机器人包括夹持机构1-6、储蛋机构1-12、喂料机构1-15、行走机构1-9、消毒机构1-3、太阳能板1-1、第二摄像头1-2、滑轨1-4、蓄电池组1-5、横架1-10、第三摄像头1-11、导轨1-13、支架1-16和底架1-18,所述底架1-18顶端安装有支架1-16,所述支架1-16顶端固定连接横架1-10,支架1-16内侧固定安装有滑轨1-4,所述滑轨1-4上安装有两组夹持机构1-6,所述储蛋机构1-12安装于底架1-18顶端,所述消毒机构1-3安装于支架1-16外侧和底架1-18顶端,所述行走机构1-9安装于底架1-18四角位置处;
所述夹持机构1-6包括导向杆2-1、第一电机2-2、调节丝杠2-3、驱动轮2-4、导轮2-5、定位板2-6、定位座2-7、承接板2-8、第一步进电机2-9、第一摄像头2-10、固定平台2-11、第二电机3-1、旋转杆3-2、固定环3-3、连接杆3-4、活动杆3-5、活动盘3-6和夹爪3-7,所述定位板2-6一侧转动安装四个导轮2-5,另一侧固定连接定位座2-7,定位板2-6边部安装有第一电机2-2,三个所述螺纹套管固定镶嵌在定位座2-7内部,四个所述导轮2-5呈矩形阵列分布,且上下位置处的导轮2-5分别滑动连接于滑轨1-4上下端,所述驱动轮2-4与第一电机2-2的输出轴一端固定连接,且驱动轮2-4通过传动带与其中一个导轮2-5传动连接,可实现夹持机构1-6沿滑轨1-4方向运动输送鸡蛋,所述固定平台2-11一端连接第一步进电机2-9,另一端固定连接固定环3-3,所述调节丝杠2-3一端固定连接第一步进电机2-9的输出轴,且调节丝杠2-3外侧与定位座2-7中部的螺纹套管螺纹连接,所述导向杆2-1固定连接固定平台2-11顶端且位于第一步进电机2-9两侧,导向杆2-1顶端活动贯穿位于定位座2-7内部两侧的螺纹套管,可实现夹爪3-7上升或下降到目标鸡蛋位置,所述固定环3-3一端安装第二电机3-1,固定环3-3边部转动连接呈阵列分布的三个连接杆3-4,所述连接杆3-4底端转动连接夹爪3-7,所述第二电机3-1的输出轴一端固定连接旋转杆3-2,所述活动杆3-5一端转动连接旋转杆3-2,另一端活动贯穿固定环3-3并转动连接活动盘3-6,所述固定环3-3内直径大于活动杆3-5宽度,所述活动盘3-6边部分别与各个夹爪3-7铰接,活动盘3-6带动夹爪3-7收拢,拾取到鸡蛋,夹爪3-7采用柔性材料,在夹持过程中不会造成鸡蛋破损,所述承接板2-8与固定平台2-11边部固定连接,承接板2-8底端安装有第一摄像头2-10,通过第一摄像头2-10识别鸡蛋的位置。
具体实施方式二:结合图1和图4,本实施方式所述储蛋机构1-12包括推动气缸4-1、推板4-2、托板4-3、蛋托4-4、升降机4-5和摆放台4-6,所述升降机4-5一端安装于底架1-18顶端,另一端连接托板4-3底端,所述托板4-3顶端放置有蛋托4-4,使储蛋机构1-12可上升或下降到摆放蛋托4-4的适当位置,所述支架1-16侧面固定连接摆放台4-6,所述摆放台4-6内侧一端开设有固定孔,所述托板4-3能够活动穿过固定孔,所述推动气缸4-1固定安装于摆放台4-5一端中部,推动气缸4-1活塞一端固定连接推板4-2,且推板4-2位于摆放台4-6内侧面,推动气缸4-1带动推板4-2运动,使推板4-2推动蛋托4-4发生水平位置改变,进一步调整蛋托4-4位置。
具体实施方式三:结合图1、图5、图6和图7,本实施方式所述喂料机构1-15包括移动模块1-14、料斗5-6、料斗架5-7、抛料刀片5-8、撒料盘5-9、阀门6-1、第一锥形齿轮6-2、第二锥形齿轮6-3、第三锥形齿轮6-4、活动轴6-5、传动轴6-6、第四锥形齿轮6-7和驱动电机7-1,所述料斗架5-7顶部支架顶端安装有两个料斗5-6,两个所述料斗5-6的出料口处设有阀门6-1,两个所述撒料盘5-9分别位于两个料斗5-6下方,所述撒料盘5-9一端均匀安装有抛料刀片5-8,另一端中部固定连接活动轴6-5,所述抛料刀片5-8截面呈U形结构,饲料沿抛料刀片5-8抛洒至指定位置,所述活动轴6-5外侧固定套设有第二锥形齿轮6-3,所述旋转底座一端与料斗架5-7底部支架顶端固定连接,另一端与活动轴6-5固定连接,两个所述撒料盘5-9之间设有传动轴6-6,所述传动轴6-6两端对称安装有第三锥形齿轮6-4,且传动轴6-6中部固定套设有第四锥形齿轮6-7,两个所述第三锥形齿轮6-4分别与两个第二锥形齿轮6-3啮合连接,所述第一锥形齿轮6-2与第四锥形齿轮6-7外侧啮合连接,且第一锥形齿轮6-2一端中部与驱动电机7-1的输出轴固定连接,由此实现驱动电机7-1同时带动两个撒料盘5-9转动,当撒料盘5-9转动,由于离心力的作用将会对饲料进行抛洒,且料斗架5-7内侧设置由相应的挡板,能够防止饲料向机器内部抛洒,各个锥形齿轮啮合位置处均设置有防护罩,传动轴6-6活动贯穿各个防护罩,驱动电机7-1安装在防护罩外侧。
具体实施方式四:结合图1和图5,本实施方式所述移动模块1-14包括第一滑轮5-1、第二滑轮5-2、滑轮盘5-3、第二步进电机5-4和移动杆5-5,所述摆放台4-6底端两侧安装有导轨1-13,两组所述移动模块1-14安装于导轨1-13和喂料机构1-15之间,所述移动杆5-5一端固定连接料斗架5-7顶部支架顶端,另一端固定连接滑轮盘5-3,所述滑轮盘5-3顶端转动安装四个第二滑轮5-2,且四个第二滑轮5-2呈矩形阵列排布,所述第二步进电机5-4固定安装于滑轮盘5-3下表面,所述第一滑轮5-1与第二步进电机5-4的输出轴固定连接,第一滑轮5-1通过传动带与其中一个第二滑轮5-2传动连接,所述两列第二滑轮5-2内侧均与导轨1-13滑动连接,移动模块1-14带动喂料机构1-15沿导轨1-13方向移动,可调节喂料范围。
具体实施方式五:结合图1和图8,本实施方式所述行走机构1-9包括外壳体1-17、辊轮8-1、翻转电机8-2、主动齿轮8-3、轴架8-4、链轮8-5、从动齿轮8-6、履带8-7和第三电机8-8,所述底架1-18四角位置处均固定安装有翻转电机8-2,所述主动齿轮8-3与翻转电机8-2输出轴一端固定连接,主动齿轮8-3外侧与从动齿轮8-6啮合连接,所述底架1-18对应从动齿轮8-6位置处均固定安装有轴架8-4,所述驱动轴与从动齿轮8-6中部固定连接,且驱动轴一端活动贯穿轴架8-4并连接行走机构1-9,所述从动齿轮8-6通过驱动轴与外壳体1-17固定连接,所述外壳体1-17一侧两端均安装有链轮8-5,另一侧固定安装有第三电机8-8,所述第三电机8-8输出轴一端与其中一个链轮8-5固定连接,所述链轮8-5外侧啮合连接履带8-7,且履带8-7活动套设在外壳体1-17外侧,所述履带8-7外侧均匀安装有辊轮8-1。
具体实施方式六:结合图1和图9,本实施方式所述消毒机构1-3包括消毒喷头1-7、水箱1-8和水泵9-1,所述支架1-16顶端和底端安装有两组消毒喷头1-7,所述底架1-18顶端安装有水箱1-8,且水箱1-8分为第一腔室9-2和第二腔室9-3,所述水箱1-8顶端两侧对应第一腔室9-2和第二腔室9-3位置均安装有水泵9-1,且水泵9-1通过水管与水箱1-8连通,两个所述水泵9-1通过水管分别与两组所述消毒喷头1-7连通。
具体实施方式七:结合图1,本实施方式所述横架1-10顶端安装有太阳能板1-1,所述底架1-18顶端安装有蓄电池组1-5,且蓄电池组1-5与太阳能板1-1电性连接。
具体实施方式八:结合图1,本实施方式所述支架1-16外侧安装有第二摄像头1-2,所述横架1-10上方四角位置处分别安装有第三摄像头1-11,通过第二摄像头1-2和第三摄像头1-11实时获取周围环境情况,进行视觉识别,保证机器人正常工作运行,在指定位置处实现功能。
本发明工作原理:机器人工作时,首先将相应的空蛋托4-4放置在托板4-3上,然后启动升降机4-5带动托板4-3上升,使托板4-3带动蛋托4-4穿过摆放台4-6上的固定孔上升至摆放台4-6内侧,升降机4-5是采用剪叉式升降原理;
机器人在行进的过程中,滑轨1-4上的夹持机构1-6用于拾取鸡场中的鸡蛋,通过夹持机构1-6上设置的第一摄像头2-10能够识别鸡蛋的位置,夹持机构1-6从滑轨1-4上滑动至相应的位置,启动第一步进电机2-9,使第一步进电机2-9带动调节丝杠2-3转动,由于螺纹的旋进作用,配合固定平台2-11内部的螺纹套管,定位座2-7将沿导向杆2-1方向发生上下位移改变,直至夹爪3-7移动至适合拾取鸡蛋的高度位置处,然后固定环3-3上的第二电机3-1带动旋转杆3-2绕一端进行相应的圆周运动,旋转杆3-2另一端将会向上拉动活动杆3-5顶端,活动杆3-5底端将会向上拉动活动盘3-6,使活动盘3-6向上运动,带动其周边三个夹爪3-7相互收拢,从而将鸡蛋夹持住,夹爪3-7采用柔性材料;
鸡蛋拾取完成后,在调节丝杠2-3的作用下带动鸡蛋上升到一定高度,启动第一电机2-2,带动其输出轴端的驱动轮2-4转动,驱动轮2-4转动将通过传动带带动定位板2-6上其中一个导轮2-5转动,四个导轮2-5两两上下配合,能够滑动卡设在滑轨1-4上,导轮2-5发生转动后,在滑轨1-4上滚动,从而驱使夹持机构1-6在滑轨1-4上发生移动,直至使夹持机构1-6运动至储蛋机构1-12位置,下放鸡蛋,并松开夹爪3-7,使鸡蛋放入蛋托4-4中,通过在滑轨1-4上设置两个或多个夹持机构1-6,从而可以不断的拾取鸡蛋放入到蛋托4-4中,提高效率,在此过程中通过推动气缸4-1带动推板4-2运动,使推板4-2推动蛋托4-4发生水平位置改变,以调整蛋托4-4上蛋槽的位置,便于夹持机构1-6放置鸡蛋,当鸡蛋放满蛋托4-4后,推动气缸4-1带动推板4-2将蛋托4-4推向摆放台4-6一端或人为取下蛋托4-4,由升降机4-5输送新的蛋托4-4;
其次,在机器人行进过程中,通过喂料机构1-15实现抛洒喂料功能,料斗5-6内装满饲料,然后打开料斗5-6底端出料口的阀门6-1,使饲料落到撒料盘5-9上,同时启动驱动电机7-1,使驱动电机7-1带动第一锥形齿轮6-2转动,第一锥形齿轮6-2通过第四锥形齿轮6-7传动带动传动轴6-6转动,传动轴6-6通过其两端设置的第三锥形齿轮6-4啮合两侧活动轴6-5上的第二锥形齿轮6-3,从而带动两侧的活动轴6-5转动,通过这些传动机构能够使驱动电机7-1带动两侧的撒料盘5-9转动,饲料落入撒料盘5-9上相邻两个抛料刀片5-8之间,当撒料盘5-9转动,由于离心力的作用将会对饲料进行抛洒,且料斗架5-7内侧设置由相应的挡板,能够防止饲料向机器内部抛洒,通过锥形齿轮、传动轴6-6等传动机构构和撒料盘5-9等机构的设置,能够实现机器人自动喂料的功能,降低工人劳动强度,通过启动移动模块1-14中第二步进电机5-4驱动第一滑轮5-1转动,通过传动带带动其中的一个第二滑轮5-2转动,两个移动模块1-14上分别由四个第二滑轮5-2两两左右配合能够滑动卡设在导轨1-13上,第二滑轮5-2发生转动后,在导轨1-13上滚动,从而驱使喂料机构1-15在导轨1-13上发生移动,便于调节撒料范围;
最后,该机器人依靠行走机构1-9实现行进,通过外壳体1-17上的第三电机8-8带动内侧的链轮8-5转动,从而使链轮8-5带动履带8-7进行传动,使行走机构1-9实现行进功能,采用传统的履带轮形式,便于匹配复杂的地形,在履带8-7外侧均匀分布辊轮8-1,通过辊轮8-1的作用能够方便实现履带8-7的全向运动和穿越复杂的地形,并且在底架1-18上设置由相应的翻转机构,通过翻转电机8-2带动主动齿轮8-3转动,使主动齿轮8-3带动较大的从动齿轮8-6转动,从动齿轮8-6通过驱动轴将能够带动行走机构1-9绕一端进行翻转,从而便于翻越陡峭的地形,提高机器的适用性;
同时,机器人配备有太阳能板1-1和蓄电池组1-5,通过太阳能板1-1接受太阳能转换为电能为蓄电池组1-5供电,从而通过蓄电池组1-5为机器人供电,利用自然能源,节省消耗,底架1-18上配备有第一腔室9-2和第二腔室9-3的水箱1-8,通过在第一腔室9-2和第二腔室9-3内配备相应的杀虫药剂和消毒药剂,并通过各个水泵9-1的作用将对应的药剂抽入对应的消毒喷头1-7进行喷洒,能够对散养鸡养殖场进行消毒和驱虫,机器人前面配备第二摄像头1-2和四个第三摄像头1-11,便于机器行进过程中监测周围环境,进行视觉识别。
- 一种用于畜牧养殖的散养鸡的抓鸡装置
- 一种散养鸡养殖用自动补水装置