一种基于自动化机械手的上下料机床
文献发布时间:2023-06-19 18:29:06
技术领域
本发明涉及机械手技术领域,更具体地说,尤其是涉及到一种基于自动化机械手的上下料机床。
背景技术
自动化机械手通常用于自动加工中,利用程序控制机械手进行作业,机械手通过上下料机床达到平移活动的作用,且通过电气控制机械手移动,从而机械手采用轨道滑行移动的方式在机床上移动,但是电气带动机械手移动时采用滑轨移动,滑轨移动在水平移动时会有间隙产生,滑轨内容易在机械手的重力下产生偏移,继而机械手在移动时容易出现卡合,且间滑轨隙较小时容易出现摩擦力过大的问题,从而滑块出现阻挡晃动而不稳定,影响停留时的精确度。
发明内容
本发明实现技术目的所采用的技术方案是:一种基于自动化机械手的上下料机床,其结构包括移动机构、支撑杆、机械臂,所述支撑杆嵌固在移动机构下端,所述机械臂安装于移动机构下端,所述移动机构设有电机、伸缩杆、导轨、滑动机构,所述电机嵌固在导轨下端,所述滑动机构安装于导轨内部,所述伸缩杆嵌固在电机右侧,所述电机位于导轨下端,所述伸缩杆嵌固在机械臂左侧,所述机械臂安装于滑动机构下端,所述电机与程序进行连接,具有控制作用。
作为本发明的进一步改进,所述滑动机构设有滑动块、引导机构、限位块、转动机构,所述滑动块嵌固在转动机构侧面,所述转动机构安装于限位块内侧,所述引导机构嵌固在限位块内侧,所述引导机构与滑动块滑动配合,所述滑动块安装于导轨内部,所述滑动块下端嵌固在机械臂上端,所述滑动块为“工”字形结构,具有较稳定的特性。
作为本发明的进一步改进,所述转动机构设有压缩机构、连接杆、连接板,所述连接杆嵌固在压缩机构中间,所述连接板安装于压缩机构侧面,所述连接杆嵌固在连接板内侧,所述连接杆安装于限位块内侧,所述连接板为铝合金材质,具有弹力大的特性。
作为本发明的进一步改进,所述压缩机构设有弹簧、橡胶块、滑动板,所述弹簧嵌固在滑动板内侧,所述橡胶块位于滑动板内侧,所述弹簧嵌固在连接杆外侧,所述弹簧设有四个,以连接杆为中心环形均匀分布。
作为本发明的进一步改进,所述引导机构设有弹力机构、支撑块、弯曲板,所述弹力机构嵌固在弯曲板侧面,所述支撑块贴合在弹力机构右侧,所述弯曲板嵌固在导轨内侧,所述弯曲板为铝合金材质,具有容易弯曲的特性,所述支撑块为橡胶材质,具有弹力大,容易形变的特性。
作为本发明的进一步改进,所述弹力机构设有受力板、引导板、弹力块,所述引导板嵌固在受力板左侧,所述弹力块卡合在引导板右侧,所述弹力块贴合在受力板左侧,所述引导板为铝合金材质,且右侧为连续的三角形结构,具有容易弯曲的特性。
1.本发明中通过程序控制电机对伸缩杆伸缩,继而机械臂在导轨内的滑动机构中进行活动,使得机械臂进行上下料,从而滑动块在伸缩杆的伸缩下,滑动块与转动机构进行滑动配合,从而压缩机构对滑动块进行滑动,从而压缩机构通过连接杆进行转动,使压缩机构进行挤压转动,带动滑动板受力进行旋转,从而通过弹簧的弹力进行压缩,同时橡胶块使滑动板进行形变活动,使滑动板对滑动块产生活动挤压,避免滑动块滑动时产生卡合,且对滑动块进行阻挡的同时引导滑动,避免产生滑动卡合,同时在引导机构的阻挡下避免滑动块不稳定,且滑动机构内通过滑动受力,防止产生较大的摩擦力,避免滑动有间隙时产生卡合。
2.本发明中滑动块进行滑动时,弹力机构对滑动块进行滑动活动,通过弹力机构对弯曲板挤压,在支撑块的阻挡下避免摩擦力过大,防止滑动时产生较大的摩擦阻挡,且引导板受力滑动,对弹力块进行挤压,引导板通过受力板的阻挡产生弹力,从而对滑动块进行滑动阻挡,避免滑动块滑动时会有间隙产生,避免滑动的位置产生偏差而停留不精准。
附图说明
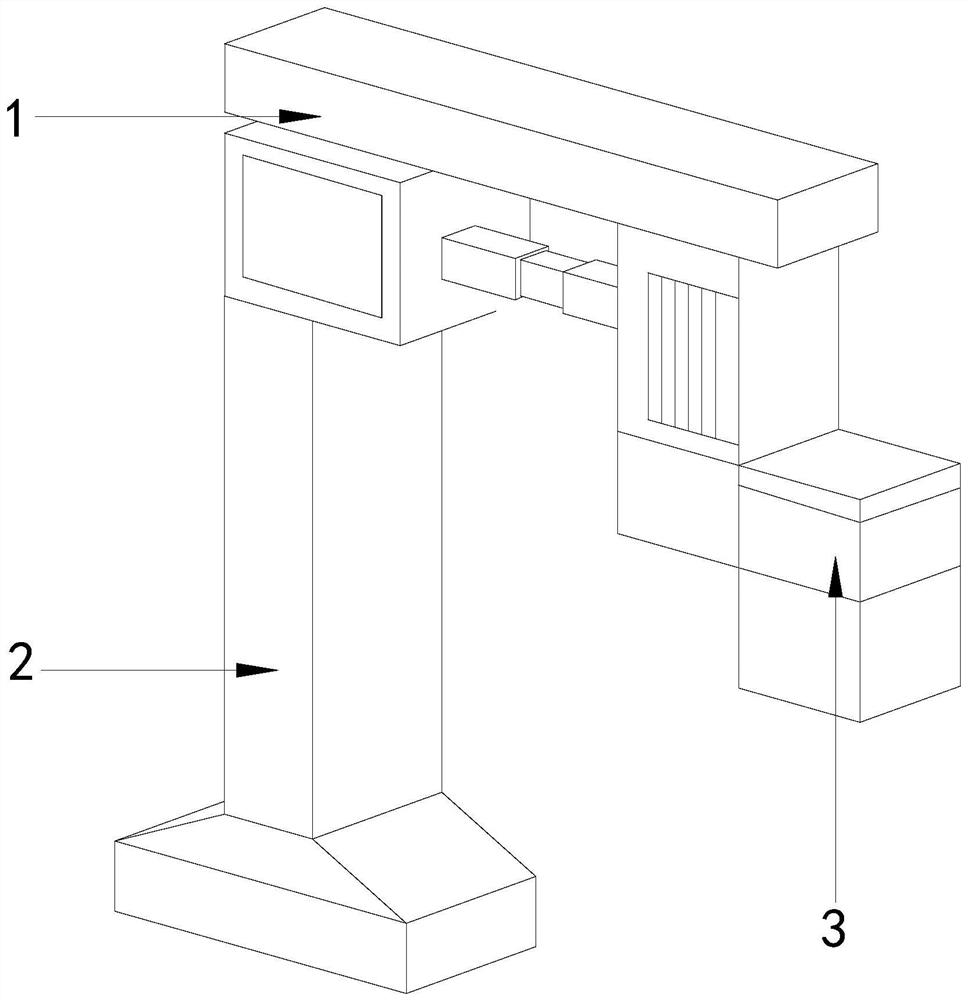
图1为本发明一种基于自动化机械手的上下料机床的结构示意图。
图2为本发明一种移动机构的侧面结构示意图。
图3为本发明一种滑动机构的侧面结构示意图。
图4为本发明一种转动机构的侧面结构示意图。
图5为本发明一种压缩机构的侧面结构示意图。
图6为本发明一种引导机构的侧面结构示意图。
图7为本发明一种弹力机构的侧面结构示意图。
图中:移动机构-1、支撑杆-2、机械臂-3、电机-11、伸缩杆-12、导轨-13、滑动机构-14、滑动块-w1、引导机构-w2、限位块-w3、转动机构-w4、压缩机构-w41、连接杆-w42、连接板-w43、弹簧-e1、橡胶块-e2、滑动板-e3、弹力机构-t1、支撑块-t2、弯曲板-t3、受力板-t11、引导板-t12、弹力块-t13。
具体实施方式
以下结合附图对本发明做进一步描述:
实施例1:
如附图1至附图5所示:
本发明一种基于自动化机械手的上下料机床,其结构包括移动机构1、支撑杆2、机械臂3,所述支撑杆2嵌固在移动机构1下端,所述机械臂3安装于移动机构1下端,所述移动机构1设有电机11、伸缩杆12、导轨13、滑动机构14,所述电机11嵌固在导轨13下端,所述滑动机构14安装于导轨13内部,所述伸缩杆12嵌固在电机11右侧,所述电机11位于导轨13下端,所述伸缩杆12嵌固在机械臂3左侧,所述机械臂3安装于滑动机构14下端,所述电机11与程序进行连接,具有控制作用,通过程序控制电机11对伸缩杆12伸缩,继而机械臂3在导轨13内的滑动机构14中进行活动,使得机械臂3进行上下料,且滑动机构14内通过滑动受力,防止产生较大的摩擦力。
其中,所述滑动机构14设有滑动块w1、引导机构w2、限位块w3、转动机构w4,所述滑动块w1嵌固在转动机构w4侧面,所述转动机构w4安装于限位块w3内侧,所述引导机构w2嵌固在限位块w3内侧,所述引导机构w2与滑动块w1滑动配合,所述滑动块w1安装于导轨13内部,所述滑动块w1下端嵌固在机械臂3上端,所述滑动块w1为“工”字形结构,具有较稳定的特性,从而滑动块w1在伸缩杆12的伸缩下,滑动块w1与转动机构w4进行滑动配合,同时在引导机构w2的阻挡下避免滑动块w1不稳定。
其中,所述转动机构w4设有压缩机构w41、连接杆w42、连接板w43,所述连接杆w42嵌固在压缩机构w41中间,所述连接板w43安装于压缩机构w41侧面,所述连接杆w42嵌固在连接板w43内侧,所述连接杆w42安装于限位块w3内侧,所述连接板w43为铝合金材质,具有弹力大的特性,从而压缩机构w41对滑动块w1进行滑动,从而压缩机构w41通过连接杆w42进行转动,使压缩机构w41进行挤压转动,对滑动块w1进行阻挡的同时引导滑动,避免产生滑动卡合。
其中,所述压缩机构w41设有弹簧e1、橡胶块e2、滑动板e3,所述弹簧e1嵌固在滑动板e3内侧,所述橡胶块e2位于滑动板e3内侧,所述弹簧e1嵌固在连接杆w42外侧,所述弹簧e1设有四个,以连接杆w42为中心环形均匀分布,所述滑动板e3受力进行旋转,从而通过弹簧e1的弹力进行压缩,同时橡胶块e2使滑动板e3进行形变活动,使滑动板e3对滑动块w1产生活动挤压,避免滑动块w1滑动时产生卡合。
本实施例的具体使用方式与作用:
本发明中,通过程序控制电机11对伸缩杆12伸缩,继而机械臂3在导轨13内的滑动机构14中进行活动,使得机械臂3进行上下料,从而滑动块w1在伸缩杆12的伸缩下,滑动块w1与转动机构w4进行滑动配合,从而压缩机构w41对滑动块w1进行滑动,从而压缩机构w41通过连接杆w42进行转动,使压缩机构w41进行挤压转动,带动滑动板e3受力进行旋转,从而通过弹簧e1的弹力进行压缩,同时橡胶块e2使滑动板e3进行形变活动,使滑动板e3对滑动块w1产生活动挤压,避免滑动块w1滑动时产生卡合,且对滑动块w1进行阻挡的同时引导滑动,避免产生滑动卡合,同时在引导机构w2的阻挡下避免滑动块w1不稳定,且滑动机构14内通过滑动受力,防止产生较大的摩擦力,避免滑动有间隙时产生卡合。
实施例2:
如附图6至附图7所示:
其中,所述引导机构w2设有弹力机构t1、支撑块t2、弯曲板t3,所述弹力机构t1嵌固在弯曲板t3侧面,所述支撑块t2贴合在弹力机构t1右侧,所述弯曲板t3嵌固在导轨13内侧,所述弯曲板t3为铝合金材质,具有容易弯曲的特性,所述支撑块t2为橡胶材质,具有弹力大,容易形变的特性,从而弹力机构t1对滑动块w1进行滑动活动,通过弹力机构t1对弯曲板t3挤压,在支撑块t2的阻挡下避免摩擦力过大,防止滑动时产生较大的摩擦阻挡。
其中,所述弹力机构t1设有受力板t11、引导板t12、弹力块t13,所述引导板t12嵌固在受力板t11左侧,所述弹力块t13卡合在引导板t12右侧,所述弹力块t13贴合在受力板t11左侧,所述引导板t12为铝合金材质,且右侧为连续的三角形结构,具有容易弯曲的特性,从而引导板t12受力滑动,对弹力块t13进行挤压,引导板t12通过受力板t11的阻挡产生弹力,从而对滑动块w1进行滑动阻挡,避免滑动块w1滑动时会有间隙产生避免滑动的位置产生偏差而停留不精准。
本实施例的具体使用方式与作用:
本发明中,滑动块w1进行滑动时,弹力机构t1对滑动块w1进行滑动活动,通过弹力机构t1对弯曲板t3挤压,在支撑块t2的阻挡下避免摩擦力过大,防止滑动时产生较大的摩擦阻挡,且引导板t12受力滑动,对弹力块t13进行挤压,引导板t12通过受力板t11的阻挡产生弹力,从而对滑动块w1进行滑动阻挡,避免滑动块w1滑动时会有间隙产生,避免滑动的位置产生偏差而停留不精准。
利用本发明所述技术方案,或本领域的技术人员在本发明技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本发明的保护范围。
- 一种喷头加工机床自动上下料的机械手系统
- 一种基于自动化机械手的上下料机床
- 一种基于自动化机械手的上下料机床