马达控制系统
文献发布时间:2023-06-19 09:47:53
技术领域
公开的技术涉及靠驱动马达移动的移动体上搭载的马达控制系统。
背景技术
马达是将电能转换为动能的装置(电动机)。马达也因易于控制而在家电等各种领域中使用。一般而言,马达多为小型且低输出,但也有驱动电车、电梯等的较为大型且高输出的马达(驱动马达)。在发电站等,马达也被用作发电机。
近年来,驱动马达也越来越多地用于电动汽车、混动(hybrid)车等。例如,专利文献1中公开了搭载着那样的驱动马达(也用作发电机)与发动机的混动车。该混动车具备能连接充电座(charging stand)、家庭用电源等进行充电的额定电压为数百V的强电电池作为驱动马达的电源。
关于公开的技术,专利文献2公开了一种洗衣机用但却能对磁铁的磁力进行增磁及减磁的马达。
洗衣机在洗涤、漂洗的工序中需要高转矩低旋转的马达输出,在脱水工序中需要低转矩高旋转的马达输出。因此,洗衣机具备变速器,通过该变速器配合这两个工序地使马达的输出在两档切换。专利文献2的洗衣机还能使磁铁的磁力从通常的磁力增磁或减磁,由此使马达的输出特性变化,根据负荷使由变速器切换的各马达输出最优化。
现有技术文献
专利文献
专利文献1:日本特开2014-231290号公报;
专利文献2:日本特开2011-200545号公报。
发明内容
发明要解决的问题:
如上所述,洗衣机中马达需要的高频次的输出限于两个输出范围。因此,能够仅通过变速器切换至任意一方,且在各输出范围内以通常的磁力为基准根据负荷的大小对磁铁进行增磁或减磁,而谋求马达输出的最优化。
然而,搭载于汽车等的驱动马达在负荷方向及旋转方向两者中需要在非常大的范围内高频次的输出。而且,由于其自身移动,所以其电源只能使用电池。
在这样的限制下,要在驱动马达实现大范围的输出特性,可考虑如专利文献1的混动车那样搭载高电压的电池、搭载大型的马达等。但是,任何一种情况都会使装备大型化、高重量化,因此对移动体是不利的。
因此公开的技术的主要的目的是提供一种能避免电池的高电压化、马达的大型化,适用于自身移动的移动体的驱动马达的马达控制系统。
解决问题的手段:
公开的技术涉及靠驱动马达移动的移动体上搭载的马达控制系统。
所述马达控制系统具备:检测所述移动体的驱动所需要的输出的输出传感器;向所述驱动马达供给电力的电池;和控制装置,所述控制装置控制所述驱动马达以在规定的输出范围内输出基于所述输出传感器的检测值设定的所述驱动马达的旋转动力的需求量。
所述驱动马达具有:输出所述旋转动力且设置有磁力可变磁铁的转子;和与所述转子隔开缝隙地相向,设置有由所述电池通电的多个绕组的定子。所述控制装置具有:控制所述绕组中流通的驱动电流而输出所述旋转动力的需求量的马达输出控制部;和控制所述绕组中流通的磁化电流而变更所述磁力可变磁铁的磁力的磁化控制部。并且,构成为所述磁化控制部以使所述磁力可变磁铁的磁力与所述驱动电流在所述绕组中产生的电磁力大致一致的形式变更所述磁力可变磁铁的磁力。
即,该马达控制系统是控制移动体上搭载的驱动马达的系统,与移动体一起移动。因此,电源也使用能搭载于移动体的电池。驱动马达是所谓的永久磁铁型的同步马达,定子上设置有产生电磁力的多个绕组,转子上设置有多个磁铁。
不过,该马达控制系统中,该磁铁使用磁力可变磁铁,其磁力能够变更。
并且,控制装置中设置有变更该磁力可变磁铁的磁力的磁化控制部,该磁化控制部将磁力可变磁铁的磁力变更为与绕组中产生的电磁力大致一致。
在磁力可变磁铁的磁力与绕组中产生的电磁力大致一致时,功率因数大致为1,功率因数提高至最高水平。若功率因数升高,则能使驱动马达轻量且紧凑,能在输出范围的大范围内发挥恰当的输出,具体内容后述。因此,能避免电池的高电压化、马达的大型化等,能实现适用于自身移动的移动体的驱动马达的马达控制系统。
此外,所述马达控制系统中,所述磁力可变磁铁的作为基准的基准磁力设定为与所述输出范围的负荷上限区域内产生的所述电磁力大致一致的磁力。
藉此,在高负荷下也使功率因数大致为1。因此,能高效地驱动驱动马达。即使是轻量且紧凑的驱动马达也能抑制输出不足,能实现稳定的移动。并且,在电磁力较小的中负荷和低负荷中,能通过使磁力可变磁铁的磁力与该电磁力匹配地进行减磁来让功率因数大致为1。因此,能在输出范围的大致整个区域内提高功率因数,能高效地驱动驱动马达。
所述马达控制系统也可以是,在所述旋转动力的需求量为对所述移动体的移动无用的规定值以下时,使所述磁力可变磁铁的磁力重置为所述基准磁力。
移动体的情况有时会突然急加速。基准磁力设定为与高负荷对应的较高的基准磁力,因此通过在所谓的空转运行状态时重置为基准磁力,从而即使在进行上述那般急加速的情况下也能恰当地驱动驱动马达。
所述马达控制系统也可以是,所述输出范围被划分为多个磁化区域,所述磁化控制部根据各个所述磁化区域变更所述磁力可变磁铁的磁力。
这样一来,能以适当的频次高效地进行变更磁力可变磁铁的磁力的处理,因此能降低处理负担。
所述马达控制系统中,所述移动体可以是汽车。从所需的马达特性的观点出发,适用于汽车的驱动马达的控制。此时,所述输出传感器也可以是检测加速器的开度的加速器传感器。此外在这种情况下,也可以是所述汽车还具备发动机;构成为基于所述加速器传感器的检测值,所述驱动马达及所述发动机协同驱动所述汽车;所述电池的额定电压为50V以下。
如果是所谓的混动车,则驱动马达与发动机协同驱动,因此能通过两者的输出的结合实现更好的驱动。电池的额定电压为50V以下,则无需实施高等级的绝缘措施,因此能谋求低成本、低重量化,还有助于燃料消耗率的改善。
发明效果:
根据公开的技术,能避免电池的高电压化、马达的大型化等,因此能使电池和驱动马达紧凑,能实现适用于移动体的马达控制系统。
附图说明
图1是示出应用了公开的技术的汽车的主要结构的概略图;
图2是示出驱动马达的结构的概略剖视图;
图3是示出MCU及与之关联的主要的输入输出装置的框图;
图4是用于说明磁力可变磁铁与功率因数的关系的图;
图5是例示驱动马达的输出范围的图;
图6是简略示出马达控制系统的系统图;
图7是示出MCU进行的驱动马达的控制的一个例子的流程图;
图8是示出磁力变更控制的主要处理的流程的流程图;
符号说明:
1 汽车(移动体);
2 发动机;
3 驱动马达;
5 第一离合器;
6 转换器(inverter);
7 第二离合器;
8 变速器;
10 电池;
21 马达控制单元(控制装置);
21a 马达输出控制部;
21b 磁化控制部;
32 轴;
33 转子;
34 定子;
35 磁铁(磁力可变磁铁);
36 绕组;
50 发动机旋转传感器;
51 马达旋转传感器;
52 电流传感器;
53 磁力传感器;
54 加速器传感器(输出传感器)。
具体实施方式
以下,基于附图详细说明公开的技术的实施形态。不过,以下的说明本质上仅为例示,并非限制本发明、其适用物或是其应用。
<移动体>
图1示出应用了公开的技术的四轮的汽车1(移动体的一个例子)。该汽车1是混动车。汽车1的驱动源搭载有发动机2及驱动马达3。它们协同而驱动在四个车轮4F、4F、4R、4R中呈左右对称状的两个轮(驱动轮4R)。藉此,汽车1移动(行驶)。
该汽车1的情况,发动机2配置于车身的前侧,驱动轮4R配置于车身的后侧。即,该汽车1是所谓的FR车。此外该汽车1的情况下,作为驱动源,与驱动马达3相比发动机2是主体,驱动马达3以辅助发动机2的驱动的形式使用(所谓的轻度混动)。且驱动马达3不仅作为驱动源,还在再生时作为发电机使用。
汽车1除发动机2、驱动马达3之外,还具备第一离合器5、转换器6、第二离合器7、变速器8、差动齿轮(differential gear)9、电池10等作为驱动系的装置。汽车1还具备发动机控制单元(ECU;Engine Control Unit)20、马达控制单元(MCU;Motor Control Unit)21、变速器控制单元(TCU;Transmission Control Unit)22、制动控制单元(BCU;Brake ControlUnit)23、综合控制单元(GCU;General Control Unit)24等作为控制系的装置。
发动机旋转传感器50、马达旋转传感器51、电流传感器52、磁力传感器53、加速器(accelerator)传感器54等也随着控制系的装置设置于汽车1。加速器传感器54、电池10、及MCU21构成马达控制系统。
(驱动系的装置)
发动机2是例如以汽油为燃料进行燃烧的内燃机。且发动机2是通过重复进气、压缩、膨胀、排气各冲程来产生旋转动力的所谓的四冲程发动机。发动机2有柴油发动机等各种种类或形态,公开的技术中发动机的种类、形态等并无特别限定。
该汽车1中,发动机2以使输出旋转动力的输出轴朝向车身的前后方向的状态配置于车宽方向的大致中央部。汽车1设置有进气系统、排气系统、燃料供给系统等发动机2附带的各种装置或机构,省略它们的图示及说明。
驱动马达3通过第一离合器5串联配置于发动机2的后方。驱动马达3是由三相交流电驱动的永久磁铁型的同步马达。如图2所示,驱动马达3大致由马达壳体31、轴32、转子33、定子34等构成。
马达壳体31由内部具有前端面及后端面封闭的圆筒状的空间的容器构成,固定于汽车1的车身。转子33及定子34容纳于马达壳体31。轴32以其前端部及后端部分别从马达壳体31突出的状态旋转自如地轴支持于马达壳体31。
第一离合器5以介于轴32的前端部与发动机2的输出轴之间的形式设置。第一离合器5构成为能切换成输出轴与轴32连结的状态(接合状态)和输出轴与轴32分离的状态(非接合状态)。
第二离合器7以介于轴32的后端部与变速器8的输入轴之间的形式设置。第二离合器7构成为能切换成轴32与变速器8的输入轴连结的状态(接合状态)和轴32与变速器8的输入轴分离的状态(非接合状态)。
转子33由堆叠中心具有轴孔的多个金属板而构成的圆柱状的构件形成。轴32的中间部分固定在转子33的轴孔中,由此转子33与轴32一体化。
在转子33的外周部分上,磁铁35围绕全周设置。磁铁35构成为S极与N极在周向上等间隔交替排列。磁铁35可以由具有多个磁极的一个圆筒状的磁铁构成,也可以由构成各磁极的多个弧状的磁铁构成。
该驱动马达3中还构成为磁铁35可使磁力的大小变大变小(磁力可变磁铁35)。通常,该种驱动马达3使用矫顽力(抗磁力)大、磁力能长期保持的磁铁(永久磁铁)。在该驱动马达3中,使用矫顽力小的永久磁铁作为磁力可变磁铁35以能够较容易地变更磁力。
永久磁铁有例如铁氧(ferrite)体磁铁、钕磁铁、钐钴磁铁、铝镍钴磁铁等各种种类,矫顽力也各不相同。磁力可变磁铁35的种类、材料等能根据规格选择,并无特别限定。
该汽车1中,以利用该磁力可变磁铁35从而能使驱动马达3轻量且紧凑的形式构成马达控制系统。马达控制系统的具体内容后述。
圆筒状的定子34隔着细微的间隙(缝隙)地设置于转子33的周围(内转子型)。定子34具有堆叠多个金属板而构成的定子芯34a和将电线卷绕于该定子芯34a而构成的多个绕组36。
定子芯34a上设置有向内侧放射状地伸出的多个齿34b,通过将电线以规定的顺序卷绕于这些齿34b来形成多个绕组36。这些绕组36构成由U相、V相及W相组成的三相的绕组群。为了对这些绕组36通电,从这些绕组36引出三根连接电缆36a、36a、36a到马达壳体31的外侧。
这些连接电缆36a、36a、36a通过转换器6与车载的电池10连接。该汽车1的情况,电池10使用额定电压50V以下、具体而言48V的直流电池10。
因此,如上述专利文献1的混动车那般并非高电压,因此能使电池10自身轻量且紧凑。而且,由于无需高等级的防触电措施,所以还能简化绝缘构件等,能更轻量且紧凑地构成。因此,能抑制汽车1的车辆重量,所以能抑制燃料消耗率、电力消耗等。
电池10向转换器6供给直流电力。转换器6将该直流电力转换为三相交流电而对驱动马达3通电。藉此,各绕组36中产生电磁力。转子33被在该电磁力与磁力可变磁铁35的磁力之间作用的吸引力与排斥力旋转驱动,通过轴32及第二离合器7向变速器8输出其旋转动力。
该汽车1的情况,变速器8是多档式自动变速器(所谓的AT;AutomaticTransmission)。变速器8在一方的端部具有输入轴,在另一方的端部具有输出轴。在这些输入轴与输出轴之间组装有多个行星齿轮机构、离合器、制动器等变速机构。
构成为通过切换这些变速机构而能切换前进或后退、能在变速器8的输入与输出之间变更为不同的转速。变速器8的输出轴通过在车身的前后方向延伸地与输出轴同轴地配置的传动轴11与差动齿轮9连结。
差动齿轮9上连结有在车宽方向延伸且与左右驱动轮4R、4R连结的一对驱动轴13、13。通过传动轴11输出的旋转动力在由差动齿轮9分配后,通过这些一对驱动轴13、13传递至各驱动轮4R。各车轮4F、4F、4R、4R为了对其旋转进行制动而安装有制动器14。
(控制系的装置)
汽车1为了根据驾驶员的操作来控制其行驶而设置有上述的ECU20、MCU21、TCU22、BCU23及GCU24各单元。这些单元各自由CPU、存储器、接口等硬件和数据库、控制程序等软件构成。
ECU20是主要控制发动机2的工作的单元。MCU21是主要控制驱动马达3的工作的单元(相当于控制装置)。TCU22是主要控制变速器8的工作的单元。BCU23是主要控制制动器14的工作的单元。GCU24是与这些ECU20、MCU21、TCU22、BCU23电气连接,对它们进行综合控制的上位单元。
发动机旋转传感器50安装于发动机2,检测发动机2的转速并向ECU20输出。马达旋转传感器51安装于驱动马达3,检测驱动马达3的转速或旋转位置并向MCU21输出。电流传感器52安装于连接电缆36a,检测各绕组36上通电的电流值并向MCU21输出。
磁力传感器53安装于驱动马达3,检测磁力可变磁铁35的磁力并向MCU21输出。加速器传感器54安装于驾驶员在驱动汽车1时踩踏的加速器的踏板(加速踏板15),检测与汽车1的驱动所需的输出相当的加速器开度并向ECU20输出(相当于输出传感器)。
各单元基于从这些传感器输入的检测值的信号协同控制驱动系的各装置,由此汽车1行驶。例如,汽车1在发动机2的驱动力下行驶时,ECU20基于加速器传感器54及发动机旋转传感器50的检测值控制发动机2的运行。
并且,TCU22控制第一离合器5及第二离合器7为接合状态。汽车1制动时,BCU23控制各制动器14。在再生的制动时,TCU22控制第一离合器5为非接合状态至部分接合状态,控制第二离合器7为接合状态。这样,MCU21以通过驱动马达3发电,并将该电力回收至电池10的形式进行控制。
<马达控制系统>
MCU21以驱动马达3在单独输出的状态或根据需要辅助发动机2的输出的状态下,借助驱动马达3的旋转动力使汽车1行驶的形式进行控制。
具体而言,ECU20基于加速器传感器54、发动机旋转传感器50等的检测值设定发动机2的旋转动力。与之相伴的,GCU24按照预先设定的发动机2与驱动马达3之间的输出的分配比率在规定的输出范围内设定驱动马达3的旋转动力的需求量,MCU21控制驱动马达3以输出该需求量。
图3示出MCU21及与之关联的主要的输入输出装置。MCU21中设置有马达输出控制部21a及磁化控制部21b。马达输出控制部21a具有控制驱动马达3的驱动的功能,通过控制绕组36中流通的驱动电流来向驱动马达3输出旋转动力的需求量。
另一方面,磁化控制部21b具有提高驱动马达3的功率因数的功能,通过控制绕组36中流通的磁化电流来变更磁力可变磁铁35的磁力。具体而言,以使磁力可变磁铁35的磁力与由驱动电流在绕组36中产生的电磁力大致一致的形式变更磁力可变磁铁35的磁力。
功率因数是有功功率(实际消耗的电力)相对于视在功率(向驱动马达3供给的电力)的比例。由于功率因数较低时,要获得同样的输出需要通电较大的电流,相应地就会使马达大型化。因此,通过提高驱动马达3的功率因数,能使驱动马达3轻量且紧凑。又,功率因数升高则也能提高再生时的发电能力。
为了将驱动马达3的功率因数提高至上限,需要使绕组36产生的电磁力与永久磁铁的磁力大致一致(如果电磁力与磁力大致一致,则功率因数大致为1)。与之相对的,通常的永久磁铁型马达的情况由于永久磁铁的磁力不变,因此在该马达输出的使用频次最高的区域中使用功率因数大致为1的磁力的永久磁铁。
即,与规格相匹配地设计永久磁铁的种类、材料、结构等,从而从生产工厂出货的初始状态就是磁化为该磁力的状态(这样的初始状态的磁力也称为基准磁力Mb)。
在家电等应用中,所需的马达输出的范围较为有限,因此即使这种马达特性也问题不大。然而,在驱动汽车1等移动体的情况,需要在非常大的范围内高频次的输出。因此,在这种马达特性下,存在需要电池的高电压化、马达的大型化等困扰。
与之相对的,在该马达控制系统中,永久磁铁使用磁力可变磁铁35,MCU21中设置有磁化控制部21b,因此能谋求功率因数的改善,消除这样的困扰。
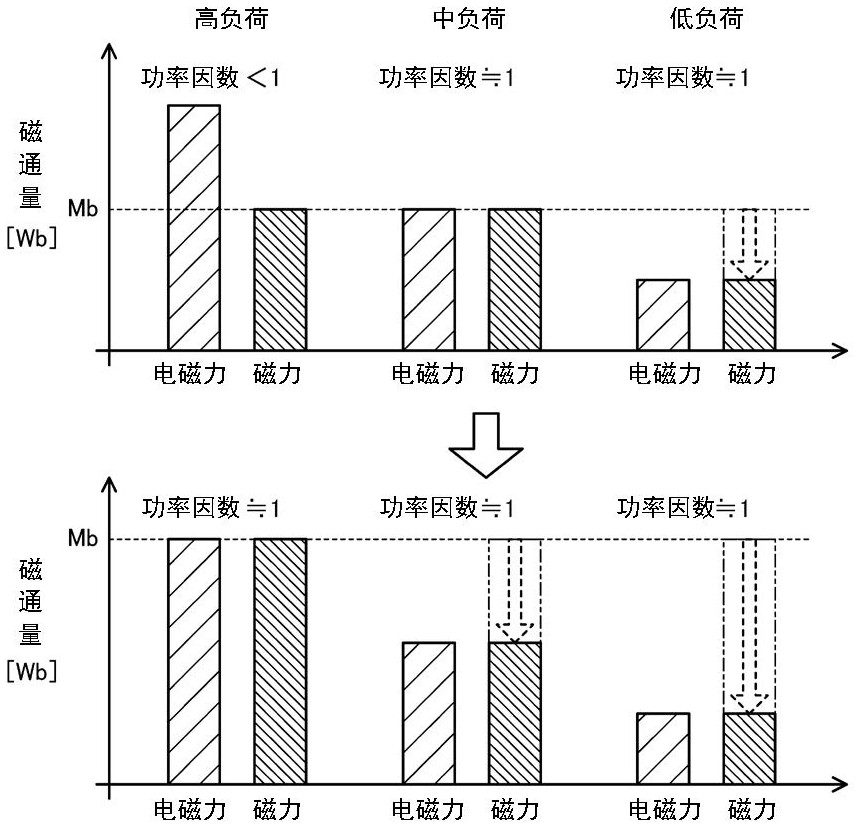
图4的上图示出将通常的永久磁铁型替换为磁力可变磁铁35时,不同负荷下的功率因数的变化。在中负荷下,由于与该负荷相匹配地设定基准磁力Mb,因此功率因数大致为1。并且,在高负荷下,由于电磁力相对较大,因此功率因数较小(功率因数<1)。
另一方面,在低负荷下,虽然电磁力根据该负荷而变小,但只要是磁力可变磁铁35,就能通过配合该电磁力减磁而使功率因数大致为1。因此,此时能在马达的输出范围中的从中负荷至低负荷的区域内提高功率因数。
进一步地,磁力可变磁铁35的基准磁力Mb理想是设定为与驱动马达3的输出范围的负荷上限区域内产生的电磁力大致一致的磁力。即,从最初就与驱动马达3的输出相匹配地设计磁力可变磁铁35的种类、材料、结构等。
并且,磁力可变磁铁35被磁化为具有强力的磁力,该磁力在以驱动马达3所需的负荷(转矩)的上限值或接近上限值的值进行输出时的电磁力大致相同。该驱动马达3中设置有如此设定的磁力可变磁铁35(也称为高磁力可变磁铁35)。
图4的下图示出高磁力可变磁铁35的情况,不同负荷下的功率因数的变化。由于基准磁力Mb设定为与负荷的大致上限值相匹配,因此高负荷的功率因数大致为1。因此,此时在高负荷也能高效地使驱动马达3驱动,所以即使是轻量且紧凑的驱动马达3也能抑制输出不足,能实现稳定的行驶。
并且,在中负荷、低负荷下,电磁力根据该负荷而变小,但只要是高磁力可变磁铁35,就能通过配合该电磁力减磁而使功率因数大致为1。因此,此时能在马达的输出范围的大致整个区域内提高功率因数,能高效地使驱动马达3驱动。
像这样,构成为在该马达控制系统中提高驱动马达3的功率因数,因此能避免电池的高电压化、马达的大型化等。
(驱动马达3的输出范围)
图5例示了驱动马达3的输出范围。由表示不同转速的转矩(负荷)的上限值的负荷上限线界定输出范围。
具体而言,在到规定的转速(r1)为止的低旋转区域中,转矩的上限值保持最大(T2)。在比低旋转区域转速高的中旋转区域及高旋转区域中,转矩的上限值逐渐递减直至转速到达其上限值(r2)。
MCU21中预先设定有界定这样的输出范围的映射图、表格等数据。马达输出控制部21a参照该数据从而在该输出范围内控制驱动马达3。
此外,该马达控制系统中,驱动马达3的输出范围被划分为多个磁化区域。并且,构成为磁化控制部21b根据这些各个磁化区域变更高磁力可变磁铁35的磁力。
如图5所示,本实施形态中,驱动马达3的输出范围被划分为第一~第四的四个磁化区域Rm。具体而言,划分为:偏靠低旋转侧并包含转矩的最大值T2的高负荷的第一磁化区域Rm1;从低旋转侧向高旋转侧扩展且比第一磁化区域Rm1负荷低并在中旋转具有转矩的峰值的第二磁化区域Rm2;比第二磁化区域Rm2负荷低且转矩的峰值向高旋转侧平移(shift)的第三磁化区域Rm3;以及比第三磁化区域Rm3负荷低且包括驱动马达3空转运行的转矩(对汽车1的行驶无用的转矩)T1的第四磁化区域Rm4。
各磁化区域Rm中与各自的输出对应地设定可谋求高功率因数化的最优的磁力值(磁力最优值)。例如,在第一磁化区域Rm1中,基准磁力Mb设定为磁力最优值(第一磁力最优值)。在第二磁化区域Rm2中设定低于第一磁力最优值的磁力最优值(第二磁力最优值)。并且,在第三磁化区域Rm3中设定低于第二磁力最优值的第三磁力最优值,在第四磁化区域Rm4中设定低于第三磁力最优值的第四磁力最优值。
磁化控制部21b基于汽车1的运行状态预测最优的磁化区域Rm,在转变为与磁化区域Rm邻接的其他磁化区域Rm时,使高磁力可变磁铁35的磁力变更为与该磁化区域Rm对应的磁力最优值。例如,在从第一磁化区域Rm1转变为第二磁化区域Rm2时,在驱动马达3中执行减磁处理,使高磁力可变磁铁35的磁力从第一磁力最优值变更为第二磁力最优值。
又例如,在从第三磁化区域Rm3转变为第二磁化区域Rm2时,在驱动马达3中执行增磁处理,使高磁力可变磁铁35的磁力从第三磁力最优值变更为第二磁力最优值。
(马达控制系统的控制例)
图6示出马达控制系统的简化的系统图。图7示出MCU21进行的驱动马达3的控制的一个例子。参照它们的同时对驱动马达3具体的控制的流程进行说明。另外,驱动马达3由使用转矩电流指令Iq
MCU21在汽车1为可行驶的状态时,从电流传感器52、马达旋转传感器51、磁力传感器53随时输入检测值(步骤S1)。又,ECU20也同样地从加速器传感器54、发动机旋转传感器50等随时输入检测值。
GCU24从ECU20获取加速器传感器54的检测值,按照预先设定的发动机2与驱动马达3之间的输出的分配比率设定驱动马达3的旋转动力的需求量。GCU24将输出与该需求量相当的转矩的指令(转矩指令值T
MCU21(马达输出控制部21a)在输入转矩指令值T
MCU21基于运算得到的驱动电流指令值Idq
并且,MCU21在判定为无需高磁力可变磁铁35的磁力的变更时,判定输出的转矩是否大于驱动马达3空转运行的转矩T1(步骤S7)。并且,MCU21在输出的转矩大于转矩T1时,通过通常的矢量控制来控制驱动马达3。
即,马达输出控制部21a通过电流控制,基于电流传感器52及马达旋转传感器51的检测值,执行为了进行PWM控制而输出的指令(电压指令值Vuvw
该开关指令值通过驱动电路(drive circuit)输出至转换器6,由此在转换器6的内部对多个开关元件进行开关控制。藉此,使规定的三相交流电(驱动电流)对各绕组36群通电,从而驱动马达3旋转(步骤S10)。
另一方面,MCU21在判定为需要高磁力可变磁铁35的磁力的变更时(步骤S6为否),通过磁化控制部21b执行磁力变更控制(步骤S11)。
又,MCU21即使在判定为无需高磁力可变磁铁35的磁力的变更时,在判定出输出的转矩为驱动马达3空转运行的转矩T1以下的情况下(步骤S7为否),仍通过磁化控制部21b执行磁力变更控制(步骤S11)。
即,在驱动马达3的旋转动力的需求量大致为0(零)时,高磁力可变磁铁35其磁力被变更而重置为基准磁力Mb。汽车1的情况,例如存在从怠速(idling)状态或停止状态突然踩踏加速踏板15而急加速这样的情况。
高磁力可变磁铁35的情况,与高负荷匹配地将基准磁力Mb设定为高磁力,因此通过在空转运行时重置为基准磁力Mb,从而即使在进行上述那般急加速的情况下也能恰当地使驱动马达3驱动。
图8示出磁力变更控制的主要处理的流程。磁化控制部21b在需要磁力变更控制时,基于磁化状态指令值Φ
并且,磁化控制部21b基于马达旋转传感器51的检测值,判定转子33相对于定子34的位置(旋转方向的位置)是否处于适合磁化处理的位置(步骤S21),在转子33位于合适的位置时输出磁化电流(步骤S22)。磁化电流是产生比高磁力可变磁铁35的矫顽力大的电磁力的脉冲状的电流。在增磁处理与减磁处理中,电磁力的磁力线的方向相反。
磁化控制部21b判定高磁力可变磁铁35的磁力与磁化状态指令值Φ
并且,在高磁力可变磁铁35的磁力与该磁力最优值或基准磁力Mb大致相等时结束磁力变更控制,如图7所示由通常的矢量控制来控制驱动马达3(步骤S8~S10)。
能借助磁化变更控制来改善功率因数,使高磁力可变磁铁35变为与输出的旋转动力相适应的磁力,因此即使是轻量且紧凑的驱动马达3也能在大范围的输出范围内实现稳定的驱动。其结果是,能使汽车1的重量轻量化,因此也能改善燃料消耗率。还能提高发电能力,因此能进一步改善燃料消耗率。因此,该马达控制系统适用于汽车1等移动体。
另外,公开的技术的马达控制系统不限于上述的实施形态,还包含除此以外的各种结构。
例如,在上述实施形态中,作为移动体的具体例以汽车1(混动车)为例进行了说明,但公开的技术可以应用于各种类型的移动体。既可以是汽车,也可以是只靠马达行驶的电动汽车,也可以是摩托车、电动自行车等两轮车,还可以是站立式滑板车(scooter)等。
移动体也可以是船舶、自行式的电车、航空器等。不限于人搭乘而运行的类型,可以是无线操纵的无人类型。总而言之,只要是搭载于靠马达移动的移动体的,公开的技术都可应用。
实施形态示出的汽车1的结构或配置、驱动马达3的输出范围、磁化区域等乃是例示。它们可以根据规格进行变更。
- 马达控制方法、马达的控制模型的变换方法、马达控制系统、马达的控制模型的变换系统以及马达的控制模型的变换程序
- 马达控制系统、操作马达控制系统的方法和飞行器