一种基于烹饪机器人的多功能料理方法、系统、终端及存储介质
文献发布时间:2023-06-19 10:05:17
技术领域
本申请涉及厨房机器人的领域,尤其是涉及一种基于烹饪机器人的多功能料理方法、系统、终端及存储介质。
背景技术
随着智能机械装置的发展,机器人正在逐渐取代人工作业。在工业、服务业和生活领域,机器人已经在发挥自己的功效和作用。在餐饮业,炒菜机器人已经开始逐步问世。目前炒菜机器人能够替代部分厨师工作,翻炒出一些中华美食。
针对上述中的相关技术,发明人认为相关技术中存在无法识别原材料进而导致智能程度低的技术缺陷。
发明内容
为了提高智能化效果,本申请提供一种基于烹饪机器人的多功能料理方法、系统、终端及存储介质。
本申请提供的一种基于烹饪机器人的多功能料理方法、系统、终端及存储介质采用如下的技术方案:
第一方面,本申请提供一种基于烹饪机器人的多功能料理方法,采用如下的技术方案:
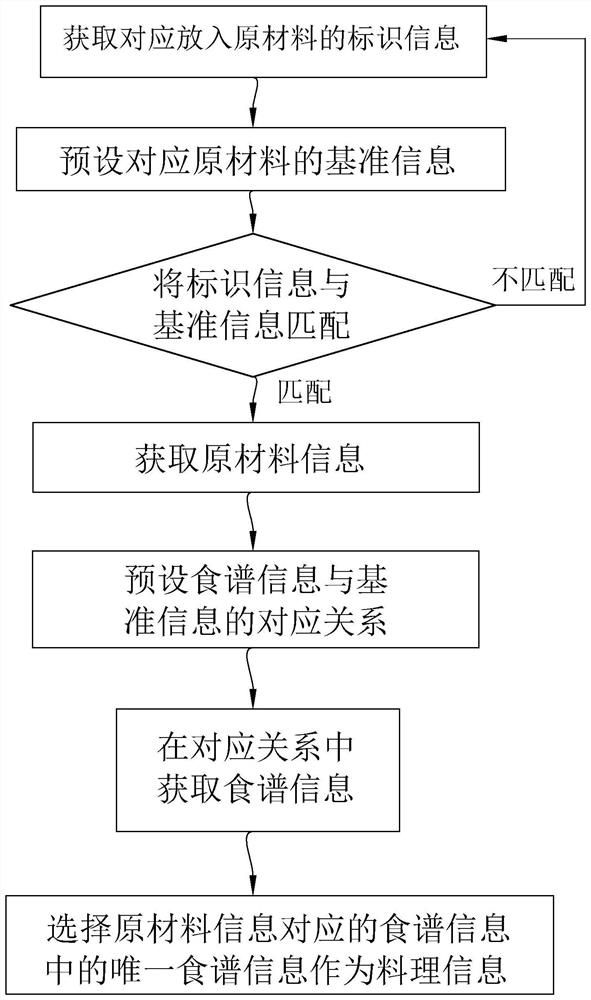
一种基于烹饪机器人的多功能料理方法,包括:
依次放入原材料,分析以获取对应放入原材料的标识信息;
预设对应原材料的基准信息;
将标识信息与基准信息匹配,以获取原材料信息;
预设食谱信息与基准信息的对应关系;
根据原材料信息,在食谱信息与基准信息的对应关系中获取食谱信息;
根据触发指令选择原材料信息对应的食谱信息中的唯一食谱信息作为料理信息;
根据料理信息对放入的原材料进行料理。
通过采用上述技术方案,在进行料理前,通过分析放入原材料的标识信息,最终确定该原材料的原材料信息,其中原材料信息主要包括原材料的名称信息,然后再基于食谱信息与基准信息的对应关系,选择现有确认的原材料信息所能完成的菜系,其中食谱信息为多个菜系,原材料可以多于对应食谱的原材料,进而便于对原材料进行利用,以做得适配原材料的菜系,操作上更加简单方便,提高了系统的智能化效果。
可选的,获取放入的原材料对应的标识信息的方法,包括:
采集图像信息;
对图像信息处理以获取对应原材料的图像区域;
分析图像区域以获取放入的原材料对应的标识信息。
通过采用上述技术方案,首先在放入原材料时,需要将原材料放在一个区域内,而进行图像采集时,将采集到的图像信息进行去边缘处理,以得到图像区域,再对图像区域进行分析,进而最终确定标识信息,通过此种方式能够便于确认标识信息,操作上也更加简单方便,增加了方法的实用性价值。
可选的,所述采集图像信息的方法,包括:
以接收到开始触发信号为起始点对图像信息采集;
采集原材料的单侧图像信息;
以接收到截止触发信号为截止点停止对图像信息采集。
通过采用上述技术方案,在接收到开始触发信号时进行原材料的单侧图像信息的采集,在接收到截止触发信号时停止采集单侧图像信息,方便对图像信息进行采集,且设置时间点以防止在时间段结束时错误采集,操作上更加简单方便。
可选的,分析图像区域以获取标识信息的方法,包括:
采集图像区域内的原材料的颜色信息;
预设原材料与其包含的颜色信息的对应关系;
根据对应关系获取颜色信息对应的类别信息;
分析以获取类别信息中的原材料对应的标识信息。
通过采用上述技术方案,不同的原材料最直接的区别就是颜色不同,故而对原材料的颜色信息进行采集并且辨别,以确定当前的原材料的所属类别,以缩小分析范围,以便更精确的对原材料的标识信息进行定位,提高标识信息的准确性,同时操作也简单方便。
可选的,获取类别信息中的原材料对应的标识信息的方法,包括:
预设选择框,基于选择框框选图像区域内的区域,以形成待确认图像信息;
预设对应原材料的基准图像信息;
将待确认图像信息并与基准图像信息匹配,以获取放入的原材料对应的标识信息。
通过采用上述技术方案,通过预设选择框并通过选择框进行区域的选择,在通过图像的对比,进而确定当前的原材料的标识信息,操作上非常简单方便,增加了方法的实用性价值。
可选的,分析标识信息,将标识信息与基准信息匹配,以获取原材料信息的方法,包括:
提取标识信息中的关键词信息;
将关键词信息与基准信息进行匹配;
若匹配成功,则基准信息包含关键词信息,则定义该基准信息为一种原材料信息;
若匹配不成功,则重新采集标识信息。
通过采用上述技术方案,通过分析标识信息并进行匹配,当标识信息中的关键词与基准信息匹配,则表明食谱中存在这种菜谱,可方便对标识信息进行确认进而形成能够进行料理的信息,操作上简单方便。
第二方面,本申请提供一种基于烹饪机器人的多功能料理系统,采用如下的技术方案:
一种基于烹饪机器人的多功能料理系统,包括:
第一处理模块,被配置为:分析以获取对应放入原材料的标识信息;
数据库,被配置为:预设对应原材料的基准信息;预设食谱信息与基准信息的对应关系;
第二处理模块,被配置为:将标识信息与基准信息匹配,以获取原材料信息;根据对应关系获取食谱信息;
选择模块,被配置为:根据触发指令选择原材料信息对应的食谱信息中的唯一食谱信息作为料理信息;
执行模块,被配置为:根据料理信息对放入的原材料进行料理。
通过采用上述技术方案,在进行料理前,通过分析放入原材料的标识信息,最终确定该原材料的原材料信息,其中原材料信息主要包括原材料的名称信息,然后再基于食谱信息与基准信息的对应关系,选择现有确认的原材料信息所能完成的菜系,其中食谱信息为多个菜系,原材料可以多于对应食谱的原材料,进而便于对原材料进行利用,以做得适配原材料的菜系,操作上更加简单方便,提高了系统的智能化效果。
第三方面,本申请提供一种基于烹饪机器人的多功能料理终端,采用如下的技术方案:
一种基于烹饪机器人的多功能料理终端,包括存储器和处理器,所属存储器上存储有能够被处理器加载并执行如上述一种基于烹饪机器人的多功能料理方法的计算机程序。
通过采用上述技术方案,在进行料理前,通过分析放入原材料的标识信息,最终确定该原材料的原材料信息,其中原材料信息主要包括原材料的名称信息,然后再基于食谱信息与基准信息的对应关系,选择现有确认的原材料信息所能完成的菜系,其中食谱信息为多个菜系,原材料可以多于对应食谱的原材料,进而便于对原材料进行利用,以做得适配原材料的菜系,操作上更加简单方便,提高了系统的智能化效果。
第四方面,一种计算机可读存储介质,存储有能够被处理器加载并执行如上述一种基于烹饪机器人的多功能料理方法的计算机程序。
通过采用上述技术方案,在进行料理前,通过分析放入原材料的标识信息,最终确定该原材料的原材料信息,其中原材料信息主要包括原材料的名称信息,然后再基于食谱信息与基准信息的对应关系,选择现有确认的原材料信息所能完成的菜系,其中食谱信息为多个菜系,原材料可以多于对应食谱的原材料,进而便于对原材料进行利用,以做得适配原材料的菜系,操作上更加简单方便,提高了系统的智能化效果。
综上所述,本申请包括以下至少一种有益技术效果:
1.在进行料理前,通过分析放入原材料的标识信息,最终确定该原材料的原材料信息,其中原材料信息主要包括原材料的名称信息,然后再基于食谱信息与基准信息的对应关系,选择现有确认的原材料信息所能完成的菜系,其中食谱信息为多个菜系,原材料可以多于对应食谱的原材料,进而便于对原材料进行利用,以做得适配原材料的菜系,操作上更加简单方便,提高了系统的智能化效果;
2.不同的原材料最直接的区别就是颜色不同,故而对原材料的颜色信息进行采集并且辨别,以确定当前的原材料的所属类别,以缩小分析范围,以便更精确的对原材料的标识信息进行定位,提高标识信息的准确性,同时操作也简单方便。
附图说明
图1是实施例中方法流程示意图。
图2是实施例中体现获取标识信息步骤的方法流程示意图。
具体实施方式
以下结合附图1-2对本申请作进一步详细说明。
本申请实施例公开一种基于烹饪机器人的多功能料理方法。参照图1和图2,一种基于烹饪机器人的多功能料理方法包括如下步骤:
S100,依次放入原材料,分析以获取对应放入原材料的标识信息。
S110,采集放入的原材料的图像信息;
S111,接收到开始触发信号为起始点对图像进行采集,开始触发信号可以设置为控制开关等开关元器件,以控制开关等开关元器件闭合进行控制电路导通的时间点作为起始点进行图像的采集,开始触发信号也可以设置为感应触发,可在原材料放入时,通过采集图像的方式确定是否存在原材料,当检测到确实存在原材料时进行触发,感应触发也可以设置为重力触发,通过对平台上放置物品的重量进行检测实现,当原材料放置于平台时,平台检测到重量变化,平台发出启动信号,以此启动信号作为开始触发信号。
S112、通过摄像装置采集原材料的单一侧面的图像信息,其中单一侧面可以是前视图、侧视图以及俯视图的其中一张附图;摄像装置可以为摄像头,也可为其他具有图像采集功能的装置。
S113、接收到截止触发信号为截止点停止对图像进行采集,可以设置为截止开关等开关元器件,以截止开关等开关元器件断开的时间点作为截止点停止进行图像的采集,截止触发信号也可以设置为感应触发,采集图像确定是否存在原材料,当检测到不存在原材料时进行触发,也可以设置为重力触发,通过平台进行检测当原材料未放置于平台时,平台发出截止信号,以此截止信号作为截止触发信号。
S120,对图像信息处理以获取对应原材料的图像区域。
图像信息为包括原材料图案的采集到的图案,图像信息可以是对应预设台面尺寸的图案,在采集到图案后,由于存在原材料图案与采集到的图案之间的边界线,可通过处理器分析边界线,同时选择边界线围合形成的区域,定义此区域为图像区域。
S130,分析图像区域以获取标识信息。
S131,采集图像区域内的原材料的颜色信息,可通过色标传感器等颜色采集装置对图像区域内的原材料的颜色进行采集,颜色的种类繁多,本申请以色标传感器内部储存的颜色种类为准进行颜色的采集,假定色标传感器内部储存的颜色种类为5种,在进行原材料的颜色采集时,最多采集5种原材料中存在的颜色;假定采集到3种颜色,定义此时的颜色信息为3种颜色以及3种所对应的颜色。
S132,预设原材料与其包含的颜色信息的对应关系。
假定颜色信息为3种颜色,颜色类型分别为红色、绿色以及黄色;此时预设对应包括这3种颜色的原材料与颜色信息的对应关系,原材料的颜色可以是多种,那么原材料通过对应关系对应的颜色也是多种,距离说明:原材料实际的颜色为3种颜色,分别是红色、绿色以及白色,那么这种原材料对应颜色信息为红色/绿色/白色/红色+绿色/红色+黄色/绿色+白色/红色+绿色+白色,共计7中搭配方式。
S133,根据对应关系获取对应的类别信息。
类别信息为原材料基于颜色的分类,此分类方式可以预设,白色+黄色的形式可以分为一类,在采集到白色+黄色两种颜色时,可直接在白色+黄色的类别中的所有原材料进行分析,通过颜色的选择能够有效缩小待确认原材料的范围。
S134,预设选择框并通过选择框框定图像信息中的任意一个区域,以形成待确认图像信息,选择框可以是方形、圆形或者三角形等,选择框的尺寸可进行预设,在进行选择框的尺寸预设后,建立光标与选择框的第二对应关系,通过移动指令控制光标移动,进而控制选择框进行移动,将选择框移动到图像信息上,根据选择框的边界选择图像信息中的范围,进而得到待比对图像信息。
S135,预设对应原材料的基准图像信息,将待比对图像信息与基准图像信息进行对比;
若两者相似度高于90%,则确定当前的待比对图像信息息所对应的标识信息,此标识信息包括原材料的名称信息。
S200,预设对应原材料的基准信息;将标识信息与基准信息匹配,以获取原材料信息。
其中标识信息为对应原材料的名称信息;基准信息可以包含多种名称信息,在依次放入原材料时,通过重复进行步骤S100,进行多次采集,获得多个标识信息。
S210,提取标识信息中的关键词信息。
关键词信息为对应的标识信息,也就是原材料的名称信息。
S220,将关键词信息与基准信息进行匹配,定义每个基准信息为包括一种或者多种标识信息的组合信息,假定标识信息为“菠菜”及“粉丝”,也就是关键词信息为“菠菜”及“粉丝”;此时基准信息为“菠菜”及“粉丝”的组合信息。
S230,预设食谱信息与基准信息的对应关系,根据对应关系获取食谱信息。
食谱信息为包括基准信息,同样假设标识信息为“菠菜”及“粉丝”,此时的食谱信息为包括“菠菜”及“粉丝”的组合信息,可以是“菠菜”、“粉丝”及“香菜”等,在通过对应关系获取食谱信息时,此时食谱信息同样存在很多种。
S240,根据触发指令选择原材料信息对应的食谱信息中的唯一食谱信息作为料理信息;此时的触发指令为外部触发指令,可以是操作面板,通过操作面板对食谱信息进行选择,以确定唯一食谱信息,并定义此唯一食谱信息为料理信息,通过料理信息对放入的原材料进行料理;
其中触发指令可由手机端、pad端等移动端发出指令进行选择,也可由PC端发出指令进行选择控制。
基于同一发明构思,本申请还提供一种基于烹饪机器人的多功能料理系统,包括:
第一处理模块,被配置为:分析以获取对应放入原材料的标识信息;
数据库,被配置为:预设对应原材料的基准信息;预设食谱信息与基准信息的对应关系;
第二处理模块,被配置为:将标识信息与基准信息匹配,以获取原材料信息;根据对应关系获取食谱信息;
选择模块,被配置为:根据触发指令选择原材料信息对应的食谱信息中的唯一食谱信息作为料理信息;
执行模块,被配置为:根据料理信息对放入的原材料进行料理。
基于同一发明构思,本申请还提供一种智能终端,包括存储器和处理器,所述存储器上存储有能够被处理器加载并执行上述数字矿山采运设备调度方法的计算机程序。
可以理解,本申请实施例中的存储器可以是易失性存储器或非易失性存储器,或可包括易失性和非易失性存储器两者。
非易失性存储器可以是ROM、可编程只读存储器(programmableROM,PROM)、可擦除可编程只读存储器(erasablePROM,EPROM)、电可擦除可编程只读存储器(electricallyEPROM,EEPROM)或闪存。
易失性存储器可以是RAM,其用作外部高速缓存。RAM有多种不同的类型,例如静态随机存取存储器(staticRAM,SRAM)、动态随机存取存储器(dynamicRAM,DRAM)、同步动态随机存取存储器(synchronousDRAM,SDRAM)、双倍数据速率同步动态随机存取存储器(doubledatarateSDRAM,DDRSDRAM)、增强型同步动态随机存取存储器(enhancedSDRAM,ESDRAM)、同步连接动态随机存取存储器(synchlinkDRAM,SLDRAM)和直接内存总线随机存取存储器。
上述任一处提到的处理器,可以是一个CPU,微处理器,ASIC,或一个或多个用于控制上述的反馈信息传输的方法的程序执行的集成电路。该处理单元和该存储单元可以解耦,分别设置在不同的物理设备上,通过有线或者无线的方式连接来实现该处理单元和该存储单元的各自的功能,以支持该系统芯片实现上述实施例中的各种功能。或者,该处理单元和该存储器也可以耦合在同一个设备上。
基于同一发明构思,本申请提供一种计算机可读存储介质,存储有能够被处理器加载并执行如上述中数字矿山采运设备调度方法的计算机程序。
上述的计算机可读存储介质包括:U盘、移动硬盘、只读存储器(Read-OnlyMemory,ROM)、随机存取存储器(RandomAccessMemory,RAM)、磁碟或者光盘等各种可以存储程序代码的介质。
本具体实施方式的实施例均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种基于烹饪机器人的多功能料理方法、系统、终端及存储介质
- 一种烹饪导航仪上的智能厨房终端系统及基于该系统的烹饪导航方法